智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码
文章目录
- 智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码
- 1.无线传感网络节点模型
- 2.覆盖数学模型及分析
- 3.白鲸算法
- 4.实验参数设定
- 5.算法结果
- 6.参考文献
- 7.MATLAB代码
摘要:本文主要介绍如何用白鲸算法进行3D无线传感器网(WSN)覆盖优化。
1.无线传感网络节点模型
本文主要基于0/1模型,进行寻优。在二维平面上传感器节点的感知范围是一个以节点为圆心,半径为 R n R_n Rn的圆形区域,该圆形区域通常被称为该节点的“感知圆盘”, R n R_n Rn称为传感器节点的感知半径,感知半径与节点内置传感器件的物理特性有关,假设节点 n n n的位置坐标为 ( x n , y n , z n ) (x_n,y_n,z_n) (xn,yn,zn)在0-1感知模型中,对于平面上任意一点 p ( x p , y p , z p ) p(x_p,y_p,z_p) p(xp,yp,zp),则节点 n n n监测到区域内点 p p p的事件发生概率为:
P r ( n , p ) = { 1 , d ( n , p ) ≤ R n 0 , e s l e (1) P_r(n,p)=\begin{cases}1, \,d(n,p)\leq R_n\\ 0,\, esle \end{cases}\tag{1} Pr(n,p)={1,d(n,p)≤Rn0,esle(1)
其中 d ( n , p ) = ( x n − x p ) 2 + ( y n − y p ) 2 + ( z n − z p ) 2 d(n,p)=\sqrt{(x_n-x_p)^2+(y_n-y_p)^2 + (z_n-z_p)^2} d(n,p)=(xn−xp)2+(yn−yp)2+(zn−zp)2为点和之间的欧式距离。
2.覆盖数学模型及分析
现假定目标监测区域为二维平面,在区域 A r e a Area Area上投放同型结构传感器节点的数目为N,每个节点的位置坐标值假设已被初始化赋值,且节点的感知半径r。传感器节点集则表示为:
N o d e { x 1 , . . . , x N } (2) Node\{x_1,...,x_N\} \tag{2} Node{x1,...,xN}(2)
其中 n o d e i = { x i , y i , z i , r } node_i=\{x_i,y_i,z_i,r\} nodei={xi,yi,zi,r},表示以节点 ( x i , y i , z i ) (x_i,y_i,z_i) (xi,yi,zi)为圆心,r为监测半径的球,假定监测区域 A r e a Area Area被数字化离散为 m ∗ n ∗ l m*n*l m∗n∗l个空间点,空间点的坐标为 ( x , y , z ) (x,y,z) (x,y,z),目标点与传感器节点间的距离为:
d ( n o d e i , p ) = ( x i − x ) 2 + ( y i − y ) 2 + ( z i − z ) 2 (3) d(node_i,p)=\sqrt{(x_i-x)^2+(y_i-y)^2 + (z_i-z)^2}\tag{3} d(nodei,p)=(xi−x)2+(yi−y)2+(zi−z)2(3)
目标区域内点被传感器节点所覆盖的事件定义为 c i c_i ci。则该事件发生的概率 P c i P{c_i} Pci即为点 ( x , y , z ) (x,y,z) (x,y,z)被传感器节点 n o d e i node_i nodei所覆盖的概率:
P c o v ( x , y , z , n o d e i ) = { 1 , i f d ( n o d e i , p ) ≤ r 0 , e s l e (4) P_{cov}(x,y,z,node_i)=\begin{cases}1, if\,d(node_i,p)\leq r\\ 0,\, esle \end{cases}\tag{4} Pcov(x,y,z,nodei)={1,ifd(nodei,p)≤r0,esle(4)
我们将所有的传感器节点在目标监测环境中的区域覆盖率 C o v e r R a t i o CoverRatio CoverRatio定义为传感器节点集的覆盖面积与监测区域的面积之比,如公式所示:
C o v e r R a t i o = ∑ P c o v m ∗ n ∗ l (5) CoverRatio = \frac{\sum P_{cov}}{m*n*l}\tag{5} CoverRatio=m∗n∗l∑Pcov(5)
那我们的最终目标就是找到一组节点使得覆盖率最大。
3.白鲸算法
白鲸算法原理请参考:https://blog.csdn.net/u011835903/article/details/127642354
白鲸算法是寻找最小值。于是适应度函数定义为未覆盖率最小,即覆盖率最大。如下:
f u n = a r g m i n ( 1 − C o v e r R a t i o ) = a r g m i n ( 1 − ∑ P c o v m ∗ n ∗ l ) (6) fun = argmin(1 - CoverRatio) = argmin(1-\frac{\sum P_{cov}}{m*n*l}) \tag{6} fun=argmin(1−CoverRatio)=argmin(1−m∗n∗l∑Pcov)(6)
4.实验参数设定
无线传感器覆盖参数设定如下:
%% 设定WNS覆盖参数,
%% 默认输入参数都是整数,如果想定义小数,请自行乘以系数变为整数再做转换。
%% 比如范围1*1,R=0.03可以转换为100*100,R=3;
%区域范围为AreaX*AreaY*AreaZ
AreaX = 100;
AreaY = 100;
AreaZ = 100;
N = 20 ;%覆盖节点数
R = 15;%通信半径白鲸算法参数如下:
%% 设定白鲸优化参数
pop=30; % 种群数量
Max_iteration=30; %设定最大迭代次数
lb = ones(1,3*N);
ub = [AreaX.*ones(1,N),AreaY.*ones(1,N),AreaZ.*ones(1,N)];
dim = 3*N;%维度为3N,N个坐标点
5.算法结果


从结果来看,覆盖率在优化过程中不断上升。表明白鲸算法对覆盖优化起到了优化的作用。
6.参考文献
[1] 史朝亚. 基于PSO算法无线传感器网络覆盖优化的研究[D]. 南京理工大学.
7.MATLAB代码
相关文章:
智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.白鲸算法4.实验参数设定5.算法结果6.参考文献7.MA…...

mac m1芯片 pytorch安装及gpu性能测试
pytorch 使用mac的m1芯片进行模型训练。 #小结:在数据量小和模型参数少,batch_size小时,cpu训练更快(原因:每次训练时数据需要放入GPU中,由于batch_size小。数据放入gpu比模型计算时间还长) 在…...

go 使用 - sync.WaitGroup
使用 - sync.WaitGroup 简介使用注意点 简介 waitgroup 是等待一组并发操作完成得方法。Goroutines对Go来说是独一无二的(尽管其他一些语言有类似的并发原语)。它们不是操作系统线程,它们不完全是绿色的线程(由语言运行时管理的线程)&#x…...

Java Web Day07-08_Layui
1. Layui概念介绍 layui(谐音:类 UI) 是一套开源的 Web UI 解决方案,采用自身经典的模块化规范,并遵循原生 HTML/CSS/JS 的开发方式,极易上手,拿来即用。其风格简约轻盈,而组件优雅丰盈&#x…...
暂时无法办理经营性ICP许可证)
阿里云华北3(张家口)暂时无法办理经营性ICP许可证
阿里云服务器的华北 3(张家口)地域暂时无法办理经营性ICP许可证,如有经营性ICP业务请勿选择此地域。如果需要办理经营性ICP业务的用户,不需要选择华北3(张家口)地域,可以选择华北2(北…...

八种常见顺序存储的算法
目录 1、线性枚举 1)问题描述 2)动图演示 3)示例说明 4)算法描述 5)源码详解 2、前缀和差分 1)问题描述 2)动图演示 3)样例分析 4)算法描述 5)源码…...

Leetcod面试经典150题刷题记录 —— 栈篇
Leetcod面试经典150题刷题记录 —— 栈篇 1. 有效的括号2. 简化路径3. 最小栈4. 逆波兰表达式求值5. 基本计算器 1. 有效的括号 题目链接:有效的括号 - leetcode 题目描述: 给定一个只包括 ( ,),{,},[&…...

【Qt-QThread-QQueue】
Qt编程指南 ■ QThread■ 示例■ QQueue■■■ QThread ■ 示例 #include <QThread> class myThread : public QThread {Q_OBJECT signals...
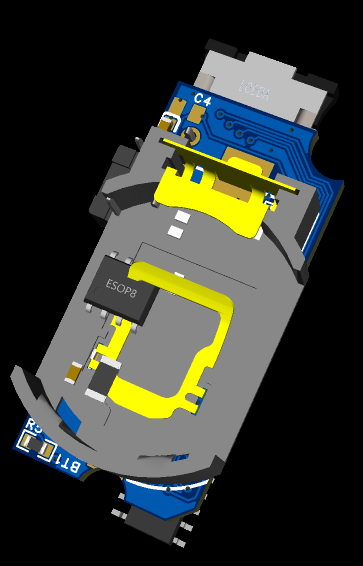
电子握力器改造
toy_hand_game 介绍 消耗体力玩具,使用握力器(Grip Strengthener)控制舵机旋转。 开始设想是控制丝杆电机滑动,两套设备就可以控制两个丝杆电机进行“模拟拔河”,后续发现硬件设计错误,ULN2003不能控制两相四线电机,…...

3D展2D数学原理
今年早些时候,我为 MAKE 杂志写了一篇教程,介绍如何制作视频游戏角色的毛绒动物。 该技术采用给定的角色 3D 模型及其纹理,并以编程方式生成缝纫图案。 虽然我已经编写了一般摘要并将源代码上传到 GitHub,但我在这里编写了对使这一…...
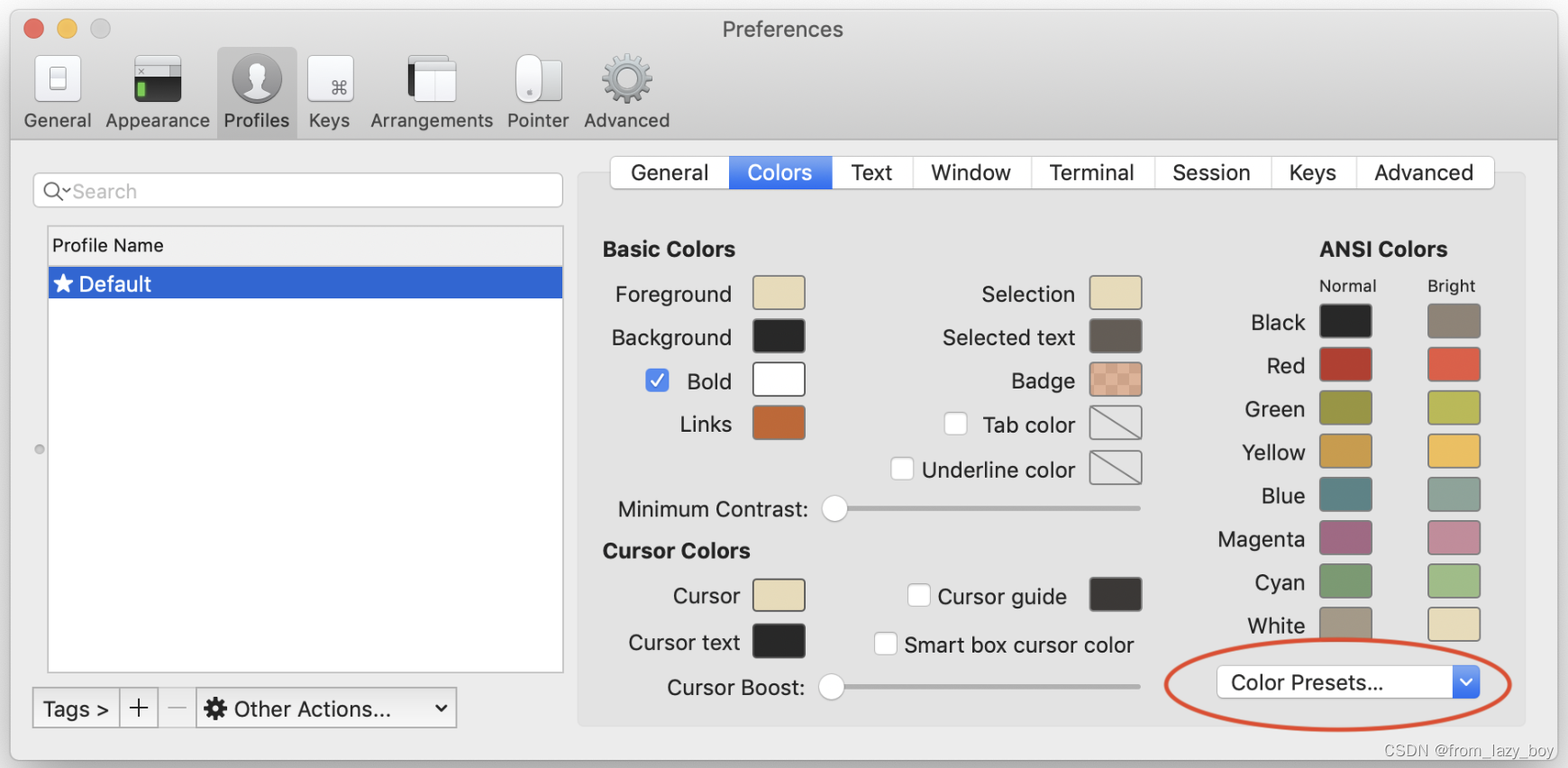
MacOS+Homebrew+iTerm2+oh my zsh+powerlevel10k美化教程
MacOS终端 你是否已厌倦了MacOS终端的大黑屏? 你是否对这种美观的终端抱有兴趣? 那么,接下来我将会教你用最简单的方式来搭建一套自己的终端。 Homebrew的安装 官网地址:Homebrew — The Missing Package Manager for macOS (o…...
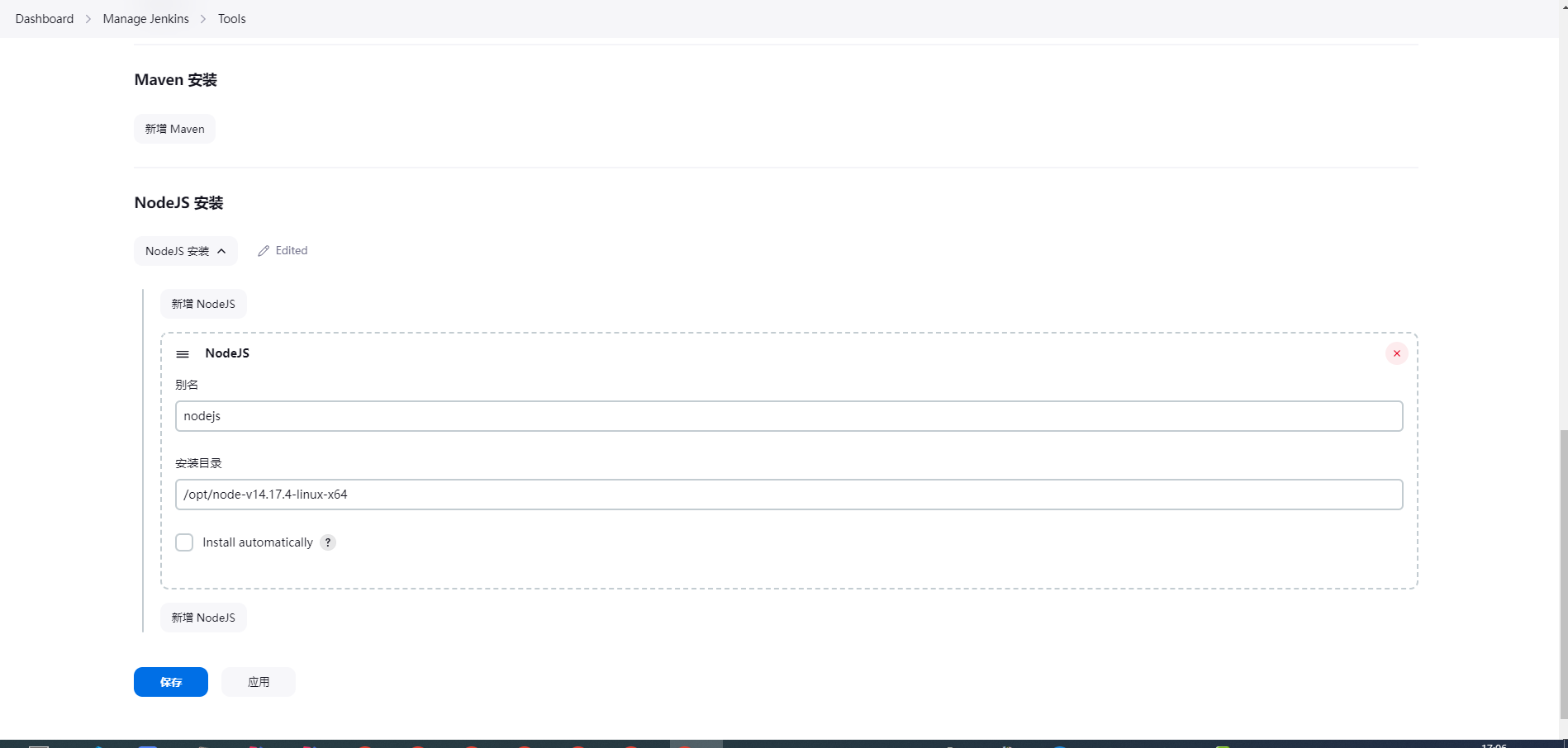
jenkins解决工具找不到的问题
--------------------------插件选择版本最好能跟服务器对上...
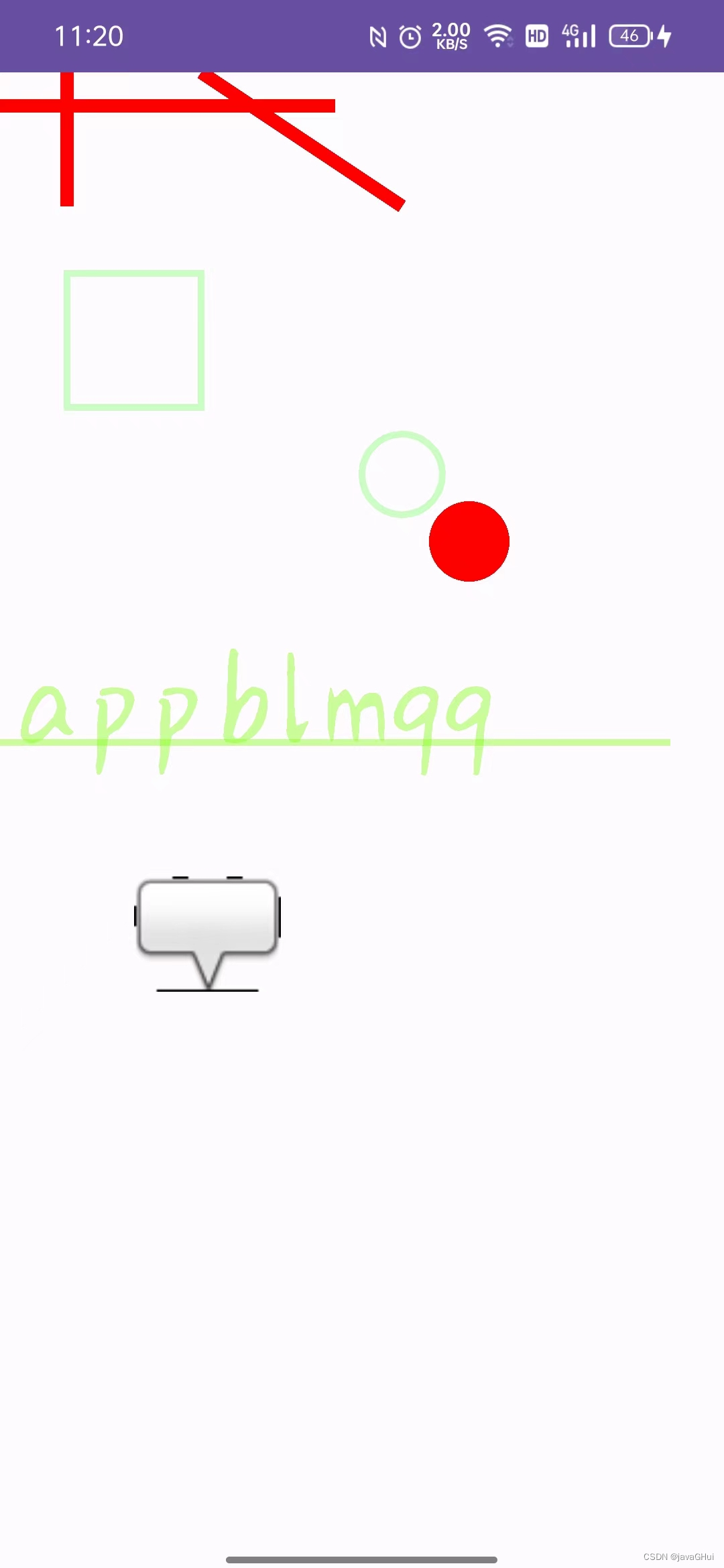
Android : 画布的使用 简单应用
示例图: MyView.java: package com.example.demo;import android.content.Context; import android.graphics.BitmapFactory; import android.graphics.Canvas; import android.graphics.Color; import android.graphics.Paint; import android.view.Vi…...

紫光展锐5G扬帆出海 | 东南亚成为5G新热土
东南亚是一块充满活力和潜力的市场,这里人口基数大、年轻消费群体占比高,电子市场在过去几年显著增长。 增速“狂飙”的东南亚手游 近年来,东南亚手游下载量逐年增长,2023 年第一季度下载量突破 21 亿次,贡献了全球近…...
STM32 学习(一)新建工程
本课程使用的stm32型号 引脚定义,有FT能接5v,没有FT能接3.3v 启动配置 第二种启动模式中,系统存储器中存放了一部分Bootloader程序,该程序可以接收串口的数据,然后刷新到主闪存中,这样就可以使用串口下载程…...

ROBOGUIDE教程:FANUC机器人固定点焊焊接虚拟仿真
目录 概述 机器人系统创建 焊接工件模型创建 机器人抓手工具添加与工件安装 工作台添加与工件安装 固定点焊焊枪支架模型创建与组装 固定点焊焊枪添加与配置 机器人远程TCP标定(核心内容) 远程TCP手动测试 远程TCP指令介绍 机器人仿真程序编写 机器人示教编程 机…...
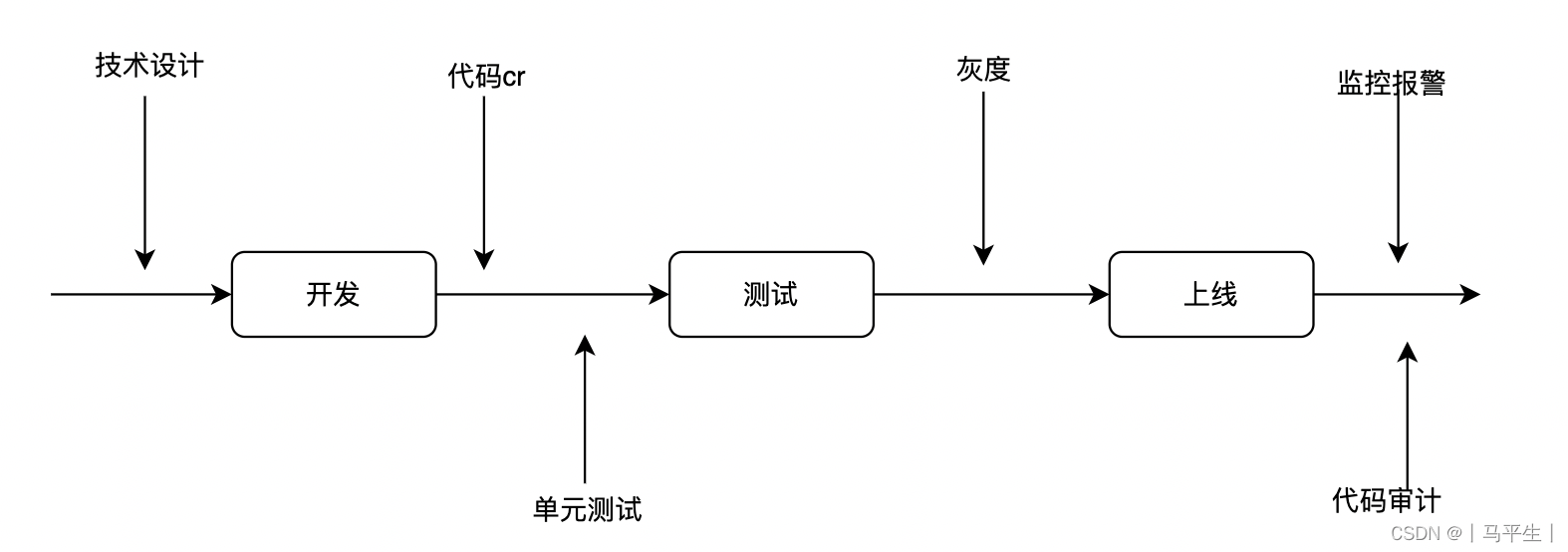
代码审计必要性探讨
1、背景 为了保证代码的质量,需要一系列的流程来进行保证: 今天要探讨的是代码审计的必要性。 2、代码审计 代码审计的做法多种多样,我理解必须解决以下问题 ,才可能有效: 核心:审计的本质是对比&#…...

SpringBoot-Shiro
Apache Shiro:https://shiro.apache.org/ 依赖 <dependency><groupId>org.apache.shiro</groupId><artifactId>shiro-spring</artifactId><version>1.4.1</version> </dependency>ShiroConfig.java Configuratio…...
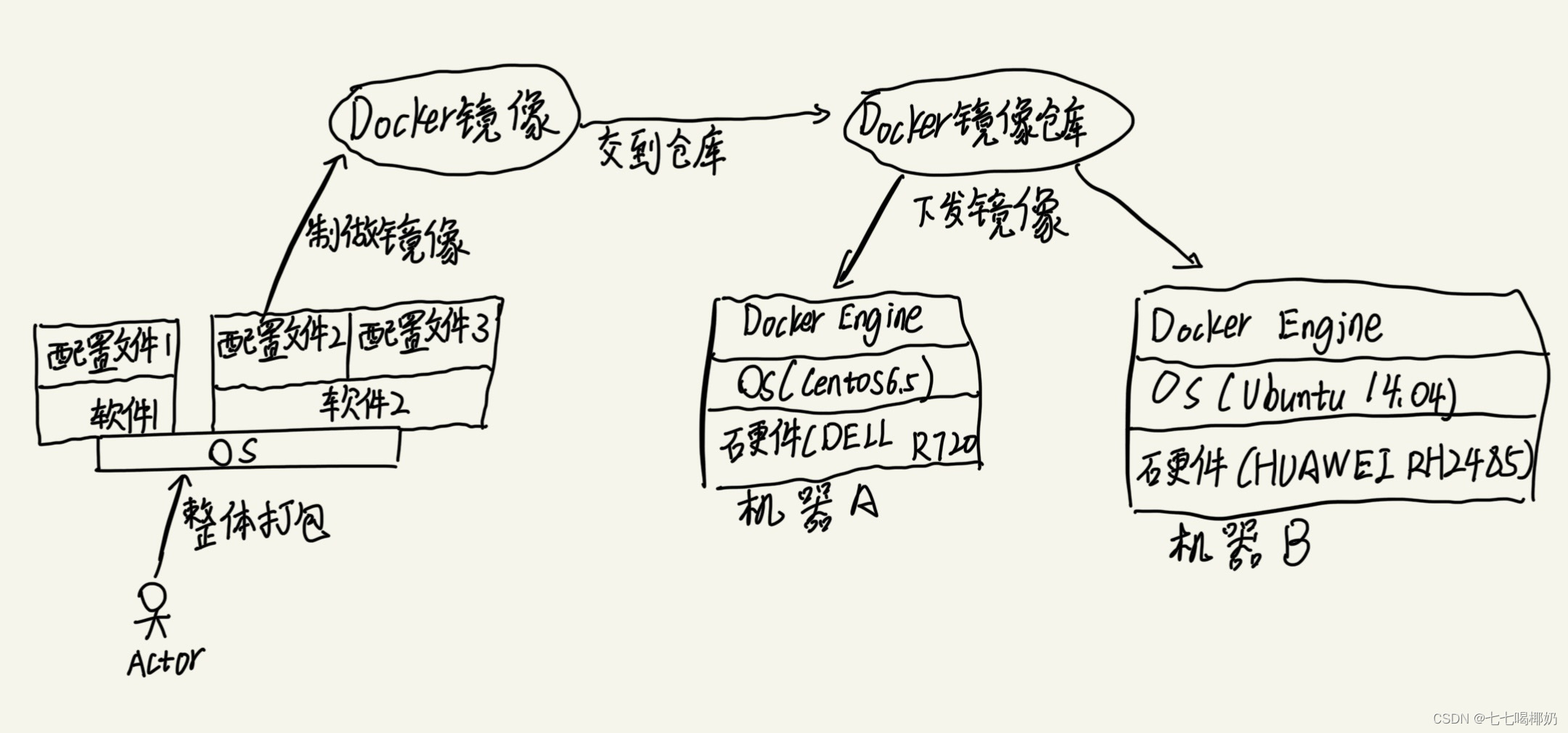
认识Docker
大家好,这里是七七,今天起开起我们的Docker技术篇,本文是介绍Docker的,不介绍如何使用和安装Docker,只是单纯的介绍Docker。 目录 一、历史 二、Docker究竟是什么 三、Docker的结构与特性 1、Docker仓库 2、Dock…...
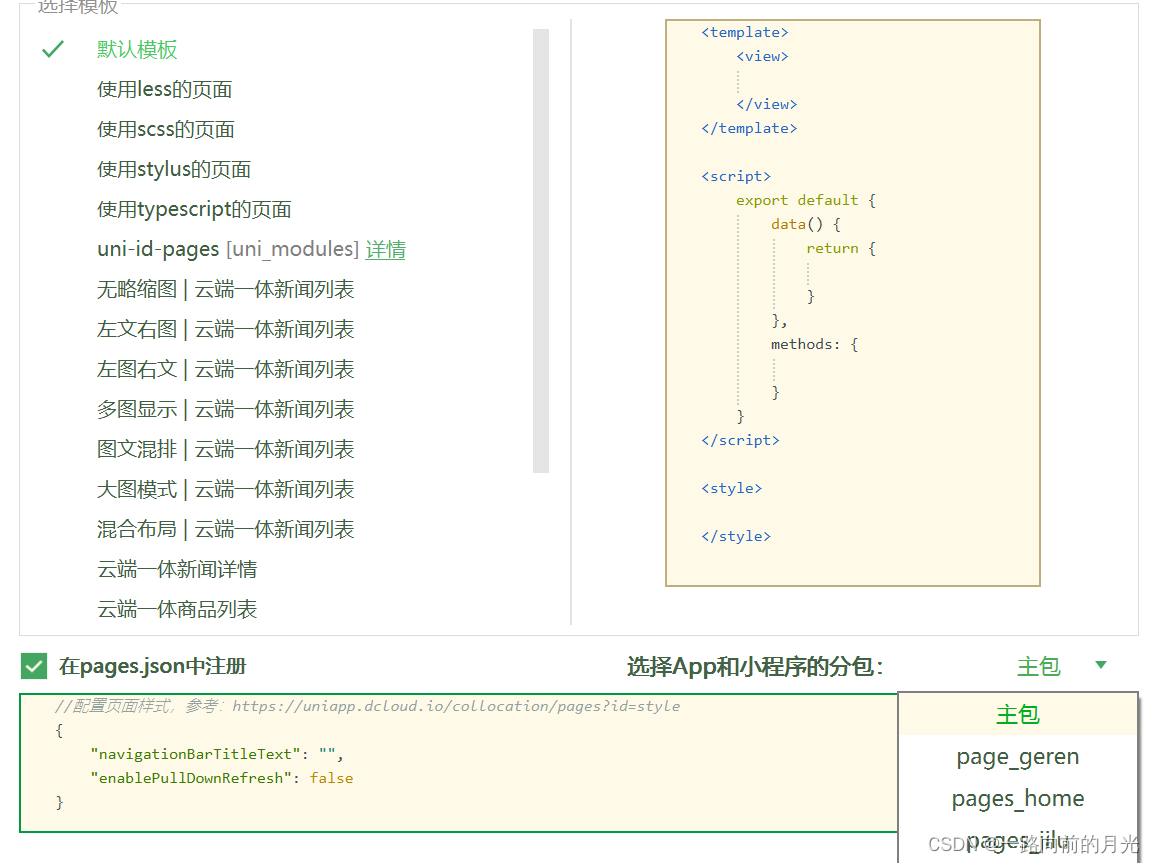
uniapp的分包使用记录
UniApp的分包是一种将应用代码划分为多个包的技术。分包的核心思想是将不同部分的代码划分为不同的包,按需加载,从而提高应用性能。使用UniApp的条件编译功能,开发人员可以根据需要将代码划分为多个包。每个包都包含一组页面和组件࿰…...

YOLO26改进 | MSHC多尺度异构卷积:用方形核与条带核捕获复杂空间纹理,以清晰动机打造超强创新!
# YOLO26改进最新创新改进系列 | MSHC多尺度异构卷积:用方形核与条带核捕获复杂空间纹理,以清晰动机打造超强创新! 购买相关资料后畅享一对一答疑! 畅享超多免费持续更新且可大幅度提升文章档次的纯干货工具! 这篇采用…...

智能产品系统架构分析 - 智能办公系统架构分层
方向:方案分析、架构设计、模块分解 智能产品系统架构分析:智能办公系统架构分层。 对智能办公系统进行架构分层分析,给出实例、UML建模、项目结构等。 “智能产品系统架构分析:智能办公系统架构分层”。 包含设备控制、预约管…...

欢迎来到Marp世界
欢迎来到Marp世界 【免费下载链接】marp The entrance repository of Markdown presentation ecosystem 项目地址: https://gitcode.com/gh_mirrors/mar/marp 用Markdown创建专业演示文稿从未如此简单! 第二张幻灯片 列表项1列表项2列表项3 第三张幻灯片&am…...

Fawkes踩过的坑以及如何解决非常详细
首先我是用anaconda创建的一个虚拟环境 fawkes_env后续的所有操作都是在该环境中实现 不使用anaconda 可直接看第一步 坑:直接用 conda create -n fawkes python3.9 后,pip install -e . 可能因为 TensorFlow 版本过新导致不兼容(Keras 2.3…...
)
C# 实时查看硬件使用率(CPU 内存 硬盘 网络)
一、整体架构 ┌─────────────────────────────────────────────────────────────┐ │ 硬件资源监控系统 │ ├────────────────────────…...

如何选择AI写论文工具?
本科生、研究生写论文常陷文献难找、逻辑混乱、查重超标、AI幻觉等困境,盲目用AI工具还易触碰学术诚信红线。本文结合学术规范、查重要求、功能适配与数据安全,实测AI论文工具,帮你精准选对合规高效的写作助手。一、先守学术合规底线…...
)
从癌症研究到企业风控:用Python实战Cox比例风险模型(附完整代码与数据)
从医学到商业:Python实战Cox风险模型的企业级应用 在医疗领域,我们关心患者存活时间;在商业世界,我们关注客户生命周期。看似迥异的场景背后,都隐藏着同一个数学工具的身影——Cox比例风险模型。这个诞生于1972年的生存…...

SkillSync MCP:为AI技能市场构建自动化安全门禁系统
1. 项目概述:为AI技能市场装上“安全门” 如果你和我一样,是Claude Code、Cursor这类AI编程助手的深度用户,那你一定对“技能”(Skills)这个概念不陌生。简单来说,技能就是一些预定义的提示词模板或工具脚…...

计算机视觉数据集选型实战指南:从COCO到Roboflow的工程决策框架
1. 这份清单不是“资料库目录”,而是计算机视觉工程师的实战弹药箱如果你正在训练一个能识别工业零件表面微小划痕的模型,却在COCO数据集上反复调参;或者你刚拿到一批医院提供的CT影像,第一反应是去Kaggle搜“medical image datas…...

Vitis HLS里给LED闪烁函数‘打标签’:深入解读ap_hs与ap_none协议的选择与实战影响
Vitis HLS中LED闪烁函数接口协议深度解析:ap_hs与ap_none的硬件实现差异与工程选择 在FPGA开发中,Vitis HLS作为高级综合工具,能够将C代码转换为可综合的硬件描述语言。然而,许多开发者在使用过程中常常忽略一个关键细节——函数…...