视觉SLAM十四讲|【四】误差Jacobian推导
视觉SLAM十四讲|【四】误差Jacobian推导
预积分误差递推公式
ω = 1 2 ( ( ω b k + n k g − b k g ) + ( w b k + 1 + n k + 1 g − b k + 1 g ) ) \omega = \frac{1}{2}((\omega_b^k+n_k^g-b_k^g)+(w_b^{k+1}+n_{k+1}^g-b_{k+1}^g)) ω=21((ωbk+nkg−bkg)+(wbk+1+nk+1g−bk+1g))
其中, w b k w_b^k wbk为 k k k时刻下body坐标系的角速度, n k g n_k^g nkg为 k k k时刻下陀螺仪白噪声, b k g b_k^g bkg为 k k k时刻下陀螺仪偏置量。 n k a n_k^a nka为 k k k时刻下加速度白噪声, b k a b_k^a bka为 k k k时刻下加速度偏置量。 k + 1 k+1 k+1时刻下记号同理。
q b i b k + 1 = q b i b k ⊗ [ 1 , 1 2 ω δ t ] T q_{b_i b_{k+1}} = q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T qbibk+1=qbibk⊗[1,21ωδt]T
a = 1 2 ( q b i b k ( a b k + n b k − b k a ) + q b i b k + 1 ( a b k + 1 + n b k + 1 − b k + 1 a ) ) a = \frac{1}{2}(q_{b_i b_{k}} (a_b^k + n_b^k -b_k^a) + q_{b_i b_{k+1}} (a_b^{k+1} + n_b^{k+1} - b_{k+1}^a)) a=21(qbibk(abk+nbk−bka)+qbibk+1(abk+1+nbk+1−bk+1a))
α b i b k + 1 = α b i b k + β b i b k δ t + 1 2 a δ t 2 \alpha_{b_i b_{k+1}} = \alpha_{b_i b_{k}} + \beta_{b_i b_k} \delta t + \frac{1}{2}a \delta t^2 αbibk+1=αbibk+βbibkδt+21aδt2
β b i b k + 1 = β b i b k + a δ t \beta_{b_i b_{k+1}} = \beta_{b_i b_{k}} + a\delta t βbibk+1=βbibk+aδt
b k + 1 a = b k a + n b k a δ t b_{k+1}^a = b_k^a + n_{b_k^a}\delta t bk+1a=bka+nbkaδt
b k + 1 g = b k g + n b k g δ t b_{k+1}^g = b_k^g + n_{b_k^g}\delta t bk+1g=bkg+nbkgδt
示例1
f 15 = δ α b i b k + 1 δ b k g f_{15} = \frac{\delta \alpha_{b_i b_{k+1}}}{\delta b_k^g} f15=δbkgδαbibk+1
由上面的递推公式可知
α b i b k + 1 = α b i b k + β b i b k δ t + 1 2 a δ t 2 \alpha_{b_i b_{k+1}} = \alpha_{b_i b_{k}} + \beta_{b_i b_k} \delta t + \frac{1}{2}a \delta t^2 αbibk+1=αbibk+βbibkδt+21aδt2
其中, α b i b k \alpha_{b_i b_{k}} αbibk、 β b i b k δ t \beta_{b_i b_k}\delta t βbibkδt都与 b k g b_k^g bkg无关,可以省略,而很容易看出 a a a中含有 q b i b k + 1 q_{b_i b_{k+1}} qbibk+1项,其中进一步含有对 b k g b_k^g bkg相关的元素,必须保留。因此进一步推得
f 15 = δ 1 2 a δ t 2 δ b k g f_{15} = \frac{\delta \frac{1}{2} a \delta t^2}{\delta b_k^g} f15=δbkgδ21aδt2
其中,
a = 1 2 ( q b i b k ( a b k + n b k − b k a ) + q b i b k + 1 ( a b k + 1 + n b k + 1 − b k + 1 a ) ) a = \frac{1}{2}(q_{b_i b_{k}} (a_b^k + n_b^k -b_k^a) + q_{b_i b_{k+1}} (a_b^{k+1} + n_b^{k+1} - b_{k+1}^a)) a=21(qbibk(abk+nbk−bka)+qbibk+1(abk+1+nbk+1−bk+1a))
q b i b k ( a b k + n b k − b k a ) q_{b_i b_{k}} (a_b^k + n_b^k -b_k^a) qbibk(abk+nbk−bka)依然与 b k g b_k^g bkg无关,可以省略。
f 15 = δ 1 4 q b i b k + 1 ( a b k + 1 + n b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{\delta \frac{1}{4} q_{b_i b_{k+1}} (a_b^{k+1} + n_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta b_k^g} f15=δbkgδ41qbibk+1(abk+1+nbk+1−bk+1a)δt2
白噪声项不可知,拿掉
f 15 = δ 1 4 q b i b k + 1 ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{\delta \frac{1}{4} q_{b_i b_{k+1}} (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta b_k^g} f15=δbkgδ41qbibk+1(abk+1−bk+1a)δt2
f 15 = δ 1 4 q b i b k + 1 ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{\delta \frac{1}{4} q_{b_i b_{k+1}} (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta b_k^g} f15=δbkgδ41qbibk+1(abk+1−bk+1a)δt2
q b i b k + 1 = q b i b k ⊗ [ 1 , 1 2 ω δ t ] T q_{b_i b_{k+1}} = q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T qbibk+1=qbibk⊗[1,21ωδt]T
f 15 = δ 1 4 q b i b k ⊗ [ 1 , 1 2 ω δ t ] T ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{\delta \frac{1}{4} q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta b_k^g} f15=δbkgδ41qbibk⊗[1,21ωδt]T(abk+1−bk+1a)δt2
其中
ω = 1 2 ( ( ω b k + n k g − b k g ) + ( w b k + 1 + n k + 1 g − b k + 1 g ) ) \omega = \frac{1}{2}((\omega_b^k+n_k^g-b_k^g)+(w_b^{k+1}+n_{k+1}^g-b_{k+1}^g)) ω=21((ωbk+nkg−bkg)+(wbk+1+nk+1g−bk+1g))
去除不可知的白噪声项
ω = 1 2 ( ( ω b k − b k g ) + ( w b k + 1 − b k + 1 g ) ) \omega = \frac{1}{2}((\omega_b^k-b_k^g)+(w_b^{k+1}-b_{k+1}^g)) ω=21((ωbk−bkg)+(wbk+1−bk+1g))
由于 k + 1 k+1 k+1时刻的信息并不知道,在此处如果不使用中值积分,直接使用初始值,有
ω = ω b k − b k g \omega =\omega_b^k-b_k^g ω=ωbk−bkg
f 15 = δ 1 4 q b i b k ⊗ [ 1 , 1 2 ( ω b k − b k g ) δ t ] T ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{\delta \frac{1}{4} q_{b_i b_k} \otimes [1, \frac{1}{2} (\omega_b^k-b_k^g) \delta t]^T (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta b_k^g} f15=δbkgδ41qbibk⊗[1,21(ωbk−bkg)δt]T(abk+1−bk+1a)δt2
此时,为了便于计算,我们需要把四元数表示旋转转换为用旋转矩阵表示矩阵的旋转,得到
f 15 = 1 4 δ R b i b k exp ( ( ( w b k − b k g ) δ t ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp(((w_b^k-b_k^g)\delta t)^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibkexp(((wbk−bkg)δt)∧)(abk+1−bk+1a)δt2
观察式子,我们要想办法把 b k g b_k^g bkg拆出来。回顾上一章,李代数旋转有性质
l n ( R e x p ( ϕ ∧ ) ) ∨ = l n ( R ) ∨ + J r − 1 ϕ ln(Rexp(\phi^{\land}))^{\vee}=ln(R)^{\vee}+J_r^{-1}\phi ln(Rexp(ϕ∧))∨=ln(R)∨+Jr−1ϕ
类似的,对于非对数情况,有
exp ( ( ϕ + δ ϕ ) ∧ ) = exp ( ϕ ∧ ) exp ( ( J r ( ϕ ) δ ϕ ) ∧ ) \exp( (\phi + \delta\phi)^{\wedge} )= \exp(\phi^{\wedge})\exp((J_r(\phi)\delta\phi)^{\wedge}) exp((ϕ+δϕ)∧)=exp(ϕ∧)exp((Jr(ϕ)δϕ)∧)
lim ϕ → 0 J r ( ϕ ) = I \lim_{\phi \rightarrow 0} J_r(\phi)=I ϕ→0limJr(ϕ)=I
exp ( ( ( w b k − b k g ) δ t ) ∧ = exp ( ( w b k δ t ) ∧ ) exp ( ( J r ( w b k δ t ) ( − b k g δ t ) ) ∧ ) \exp(((w_b^k-b_k^g)\delta t)^{\wedge}=\exp((w_b^k\delta t)^{\wedge})\exp((J_r(w_b^k\delta t)(-b_k^g \delta t))^{\wedge}) exp(((wbk−bkg)δt)∧=exp((wbkδt)∧)exp((Jr(wbkδt)(−bkgδt))∧)
f 15 = 1 4 δ R b i b k exp ( ( ( w b k − b k g ) δ t ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp(((w_b^k-b_k^g)\delta t)^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibkexp(((wbk−bkg)δt)∧)(abk+1−bk+1a)δt2
f 15 = 1 4 δ R b i b k exp ( ( w b k δ t ) ∧ ) exp ( ( J r ( w b k δ t ) ( − b k g δ t ) ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp((w_b^k\delta t)^{\wedge})\exp((J_r(w_b^k\delta t)(-b_k^g \delta t))^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibkexp((wbkδt)∧)exp((Jr(wbkδt)(−bkgδt))∧)(abk+1−bk+1a)δt2
w b k δ t → 0 w_b^k\delta t \rightarrow0 wbkδt→0
f 15 = 1 4 δ R b i b k exp ( ( J r ( w b k δ t ) ( − b k g δ t ) ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp((J_r(w_b^k\delta t)(-b_k^g \delta t))^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibkexp((Jr(wbkδt)(−bkgδt))∧)(abk+1−bk+1a)δt2
f 15 = 1 4 δ R b i b k exp ( ( − b k g δ t ) ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp((-b_k^g \delta t))^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibkexp((−bkgδt))∧)(abk+1−bk+1a)δt2
f 15 = 1 4 δ R b i b k ( I + ( − b k g δ t ) ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} (I+(-b_k^g \delta t))^{\wedge})(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibk(I+(−bkgδt))∧)(abk+1−bk+1a)δt2
f 15 = 1 4 δ R b i b k ( − b k g δ t ) ∧ ( a b k + 1 − b k + 1 a ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} (-b_k^g \delta t)^{\wedge}(a_b^{k+1} - b_{k+1}^a)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibk(−bkgδt)∧(abk+1−bk+1a)δt2
使用伴随性质,有
f 15 = 1 4 δ R b i b k ( a b k + 1 − b k + 1 a ) ∧ ( b k g δ t ) δ t 2 δ b k g f_{15}=\frac{1}{4} \frac{\delta R_{b_i b_k} (a_b^{k+1} - b_{k+1}^a)^{\wedge}(b_k^g \delta t)\delta t^2}{\delta b_k^g} f15=41δbkgδRbibk(abk+1−bk+1a)∧(bkgδt)δt2
f 15 = 1 4 R b i b k ( a b k + 1 − b k + 1 a ) ∧ δ t 2 δ t f_{15}=\frac{1}{4} R_{b_i b_k} (a_b^{k+1} - b_{k+1}^a)^{\wedge} \delta t^2 \delta t f15=41Rbibk(abk+1−bk+1a)∧δt2δt
示例2
g 12 = δ α b i b k + 1 δ n k g g_{12}=\frac{\delta \alpha_{b_i b_{k+1}}}{\delta n_k^g} g12=δnkgδαbibk+1
一看 n k g n_k^g nkg就知道又要找和旋转有关的量了。回顾递推公式,有
ω = 1 2 ( ( ω b k + n k g − b k g ) + ( w b k + 1 + n k + 1 g − b k + 1 g ) ) \omega = \frac{1}{2}((\omega_b^k+n_k^g-b_k^g)+(w_b^{k+1}+n_{k+1}^g-b_{k+1}^g)) ω=21((ωbk+nkg−bkg)+(wbk+1+nk+1g−bk+1g))
q b i b k + 1 = q b i b k ⊗ [ 1 , 1 2 ω δ t ] T q_{b_i b_{k+1}} = q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T qbibk+1=qbibk⊗[1,21ωδt]T
a = 1 2 ( q b i b k ( a b k + n b k − b k a ) + q b i b k + 1 ( a b k + 1 + n b k + 1 − b k + 1 a ) ) a = \frac{1}{2}(q_{b_i b_{k}} (a_b^k + n_b^k -b_k^a) + q_{b_i b_{k+1}} (a_b^{k+1} + n_b^{k+1} - b_{k+1}^a)) a=21(qbibk(abk+nbk−bka)+qbibk+1(abk+1+nbk+1−bk+1a))
α b i b k + 1 = α b i b k + β b i b k δ t + 1 2 a δ t 2 \alpha_{b_i b_{k+1}} = \alpha_{b_i b_{k}} + \beta_{b_i b_k} \delta t + \frac{1}{2}a \delta t^2 αbibk+1=αbibk+βbibkδt+21aδt2
有
g 12 = δ α b i b k + 1 δ n k g g_{12}=\frac{\delta \alpha_{b_i b_{k+1}}}{\delta n_k^g} g12=δnkgδαbibk+1
g 12 = δ 1 2 a δ t 2 δ n k g g_{12}=\frac{\delta \frac{1}{2}a \delta t^2}{\delta n_k^g} g12=δnkgδ21aδt2
a = 1 2 ( q b i b k ( a b k + n b k − b k a ) + q b i b k + 1 ( a b k + 1 + n b k + 1 − b k + 1 a ) ) a = \frac{1}{2}(q_{b_i b_{k}} (a_b^k + n_b^k -b_k^a) + q_{b_i b_{k+1}} (a_b^{k+1} + n_b^{k+1} - b_{k+1}^a)) a=21(qbibk(abk+nbk−bka)+qbibk+1(abk+1+nbk+1−bk+1a))
g 12 = δ 1 4 q b i b k + 1 ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{\delta \frac{1}{4}q_{b_i b_{k+1}} (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=δnkgδ41qbibk+1(abk+1−bk+1a)δt2
又因为
q b i b k + 1 = q b i b k ⊗ [ 1 , 1 2 ω δ t ] T q_{b_i b_{k+1}} = q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T qbibk+1=qbibk⊗[1,21ωδt]T
所以有
g 12 = δ 1 4 q b i b k ⊗ [ 1 , 1 2 ω δ t ] T ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{\delta \frac{1}{4}q_{b_i b_k} \otimes [1, \frac{1}{2} \omega \delta t]^T (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=δnkgδ41qbibk⊗[1,21ωδt]T(abk+1−bk+1a)δt2
ω = 1 2 ( ( ω b k + n k g − b k g ) + ( w b k + 1 + n k + 1 g − b k + 1 g ) ) \omega = \frac{1}{2}((\omega_b^k+n_k^g-b_k^g)+(w_b^{k+1}+n_{k+1}^g-b_{k+1}^g)) ω=21((ωbk+nkg−bkg)+(wbk+1+nk+1g−bk+1g))
g 12 = δ 1 4 q b i b k ⊗ [ 1 , 1 2 ( ω b k + 1 2 n k g ) δ t ] T ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{\delta \frac{1}{4}q_{b_i b_k} \otimes [1, \frac{1}{2} (\omega_b^k+\frac{1}{2}n_k^g)\delta t]^T (a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=δnkgδ41qbibk⊗[1,21(ωbk+21nkg)δt]T(abk+1−bk+1a)δt2
g 12 = 1 4 δ R b i b k exp ( ( ( ω b k + 1 2 n k g ) δ t ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{1}{4} \frac{\delta R_{b_i b_k} \exp(((\omega_b^k+\frac{1}{2}n_k^g)\delta t)^{\wedge})(a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=41δnkgδRbibkexp(((ωbk+21nkg)δt)∧)(abk+1−bk+1a)δt2
g 12 = 1 4 δ R b i b k ( exp ( ( ω b k δ t ) ∧ ) ) ( exp ( ( J r ( ω b k δ t ) 1 2 n k g δ t ) ∧ ) ) ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{1}{4} \frac{\delta R_{b_i b_k} (\exp((\omega_b^k\delta t)^{\wedge}))(\exp((J_r(\omega_b^k\delta t)\frac{1}{2}n_k^g \delta t)^{\wedge}))(a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=41δnkgδRbibk(exp((ωbkδt)∧))(exp((Jr(ωbkδt)21nkgδt)∧))(abk+1−bk+1a)δt2
g 12 = 1 4 δ R b i b k ( exp ( ( J r ( ω b k δ t ) 1 2 n k g δ t ) ∧ ) ) ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{1}{4} \frac{\delta R_{b_i b_k}(\exp((J_r(\omega_b^k\delta t)\frac{1}{2}n_k^g \delta t)^{\wedge}))(a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=41δnkgδRbibk(exp((Jr(ωbkδt)21nkgδt)∧))(abk+1−bk+1a)δt2
g 12 = 1 4 δ R b i b k ( exp ( ( 1 2 n k g δ t ) ∧ ) ) ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{1}{4} \frac{\delta R_{b_i b_k}(\exp((\frac{1}{2}n_k^g \delta t)^{\wedge}))(a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=41δnkgδRbibk(exp((21nkgδt)∧))(abk+1−bk+1a)δt2
g 12 = 1 4 δ R b i b k ( ( 1 2 n k g δ t ) ∧ ) ( a b k + 1 − b k + 1 a ) δ t 2 δ n k g g_{12}=\frac{1}{4} \frac{\delta R_{b_i b_k}((\frac{1}{2}n_k^g \delta t)^{\wedge})(a_b^{k+1} - b_{k+1}^a) \delta t^2}{\delta n_k^g} g12=41δnkgδRbibk((21nkgδt)∧)(abk+1−bk+1a)δt2
g 12 = − 1 4 δ R b i b k ( a b k + 1 − b k + 1 a ) ∧ ( 1 2 n k g δ t ) δ t 2 δ n k g g_{12}=-\frac{1}{4} \frac{\delta R_{b_i b_k}(a_b^{k+1} - b_{k+1}^a)^{\wedge} (\frac{1}{2}n_k^g \delta t)\delta t^2}{\delta n_k^g} g12=−41δnkgδRbibk(abk+1−bk+1a)∧(21nkgδt)δt2
g 12 = − 1 4 R b i b k ( a b k + 1 − b k + 1 a ) ∧ ( 1 2 δ t ) δ t 2 g_{12}=-\frac{1}{4} R_{b_i b_k}(a_b^{k+1} - b_{k+1}^a)^{\wedge} (\frac{1}{2} \delta t)\delta t^2 g12=−41Rbibk(abk+1−bk+1a)∧(21δt)δt2
g 12 = − 1 8 R b i b k ( a b k + 1 − b k + 1 a ) ∧ ( δ t ) δ t 2 g_{12}=-\frac{1}{8} R_{b_i b_k}(a_b^{k+1} - b_{k+1}^a)^{\wedge} (\delta t)\delta t^2 g12=−81Rbibk(abk+1−bk+1a)∧(δt)δt2
Levenberg-Marquardt方法证明
Levenberg (1944) 和 Marquardt (1963) 先后对高斯牛顿法进行了改进,求解过程中引入了阻尼因子
( J T J + μ I ) Δ x l m = − J T f , μ > 0 (J^TJ+\mu I) \Delta x_{lm} = -J^Tf,\mu >0 (JTJ+μI)Δxlm=−JTf,μ>0
J = δ F δ x J = \frac{\delta F}{\delta x} J=δxδF
相关文章:

视觉SLAM十四讲|【四】误差Jacobian推导
视觉SLAM十四讲|【四】误差Jacobian推导 预积分误差递推公式 ω 1 2 ( ( ω b k n k g − b k g ) ( w b k 1 n k 1 g − b k 1 g ) ) \omega \frac{1}{2}((\omega_b^kn_k^g-b_k^g)(w_b^{k1}n_{k1}^g-b_{k1}^g)) ω21((ωbknkg−bkg)(wbk1nk1g−bk1g)) …...
「实战应用」如何用DHTMLX Gantt构建类似JIRA式的项目路线图(一)
DHTMLX Gantt是用于跨浏览器和跨平台应用程序的功能齐全的Gantt图表。可满足项目管理应用程序的所有需求,是最完善的甘特图图表库。 在web项目中使用DHTMLX Gantt时,开发人员经常需要满足与UI外观相关的各种需求。因此他们必须确定JavaScript甘特图库的…...

【习题】应用程序框架
判断题 1. 一个应用只能有一个UIAbility。错误(False) 正确(True)错误(False) 2. 创建的Empty Ability模板工程,初始会生成一个UIAbility文件。正确(True) 正确(True)错误(False) 3. 每调用一次router.pushUrl()方法,页面路由栈数量均会加1。错误(Fal…...

java基于ssm的线上选课系统的设计与实现论文
摘 要 在如今社会上,关于信息上面的处理,没有任何一个企业或者个人会忽视,如何让信息急速传递,并且归档储存查询,采用之前的纸张记录模式已经不符合当前使用要求了。所以,对学生选课信息管理的提升&#x…...
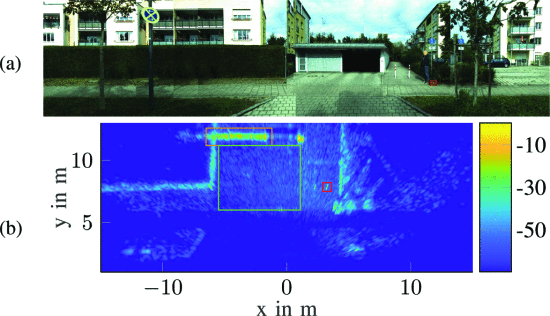
汽车雷达:实时SAR成像的实现
摘要: 众所周知,点云成像是目前实现汽车雷达感知最流行的方案,尤其是采用多级联实现的4D点云成像雷达,这是目前最有希望实现产品落地的技术方案之一。 今天重点分享关于汽车雷达SAR成像相关技术内容,这也证实了4D点云成像雷达并不一定就是汽车雷达成像唯一的方案,在业内…...
《C++语言程序设计(第5版)》(清华大学出版社,郑莉 董渊编著)习题——第2章 C++语言简单程序设计
2-15 编写一个程序,运行时提示输入一个数字,再把这个数字显示出来。 #include <iostream>using namespace std;int main() {// 提示用户输入数字cout << "请输入一个数字: ";// 用于存储用户输入的数字的变量double number;// 从…...
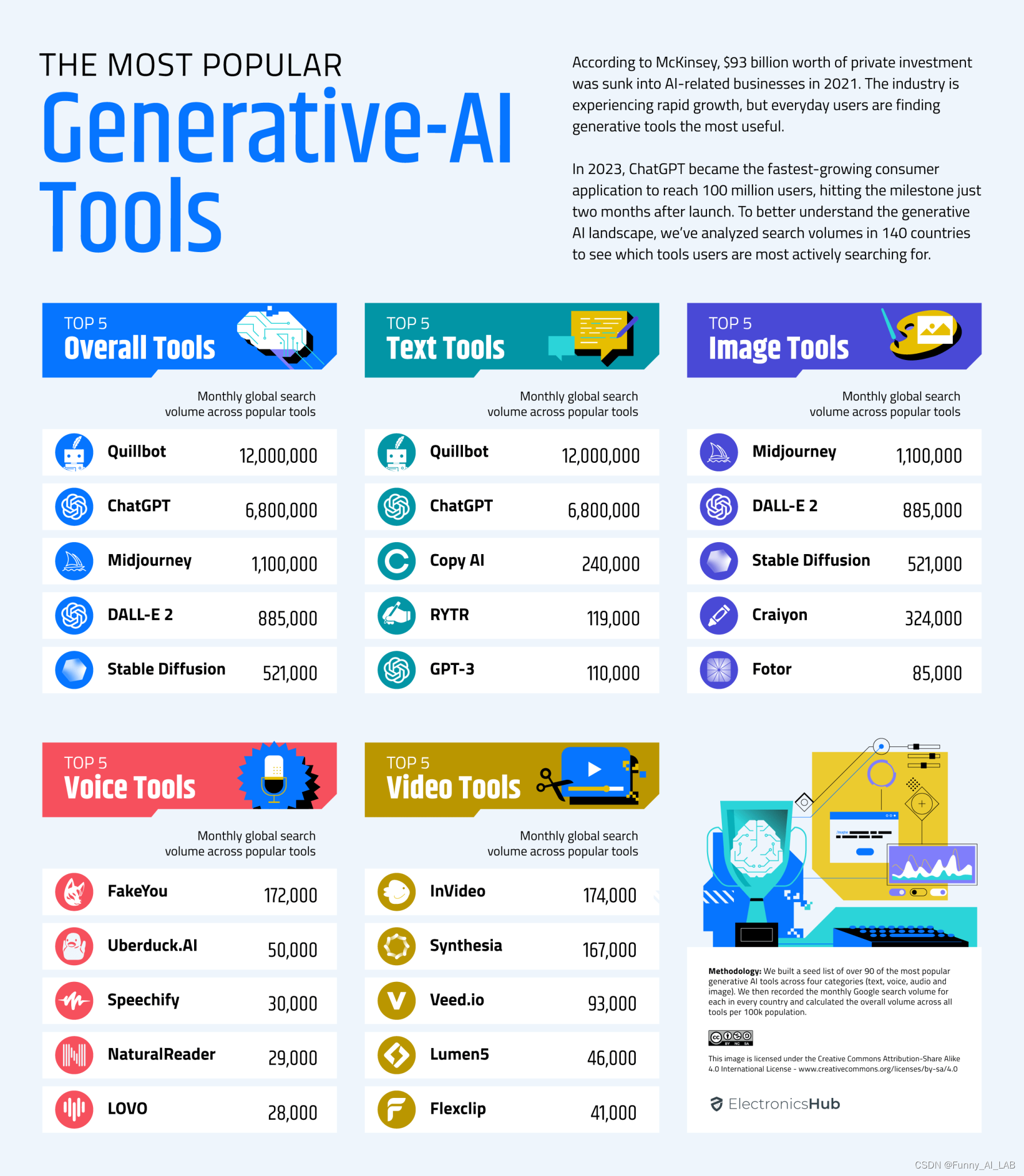
2023年生成式AI全球使用报告
生成式人工智能工具正在迅速改变多个领域,从营销和新闻到教育和艺术。 这些工具使用算法从大量培训材料中获取新的文本、音频或图像。虽然 ChatGPT 和 Midjourney 之类的工具可以用来实现超出人类能力或想象力的艺术效果,但目前它们最常用于比人类更轻松…...

安全防御之漏洞扫描技术
每年都有数以千计的网络安全漏洞被发现和公布,加上攻击者手段的不断变化,网络安全状况也在随着安全漏洞的增加变得日益严峻。寻根溯源,绝大多数用户缺乏一套完整、有效的漏洞管理工作流程,未能落实定期评估与漏洞修补工作。只有比…...
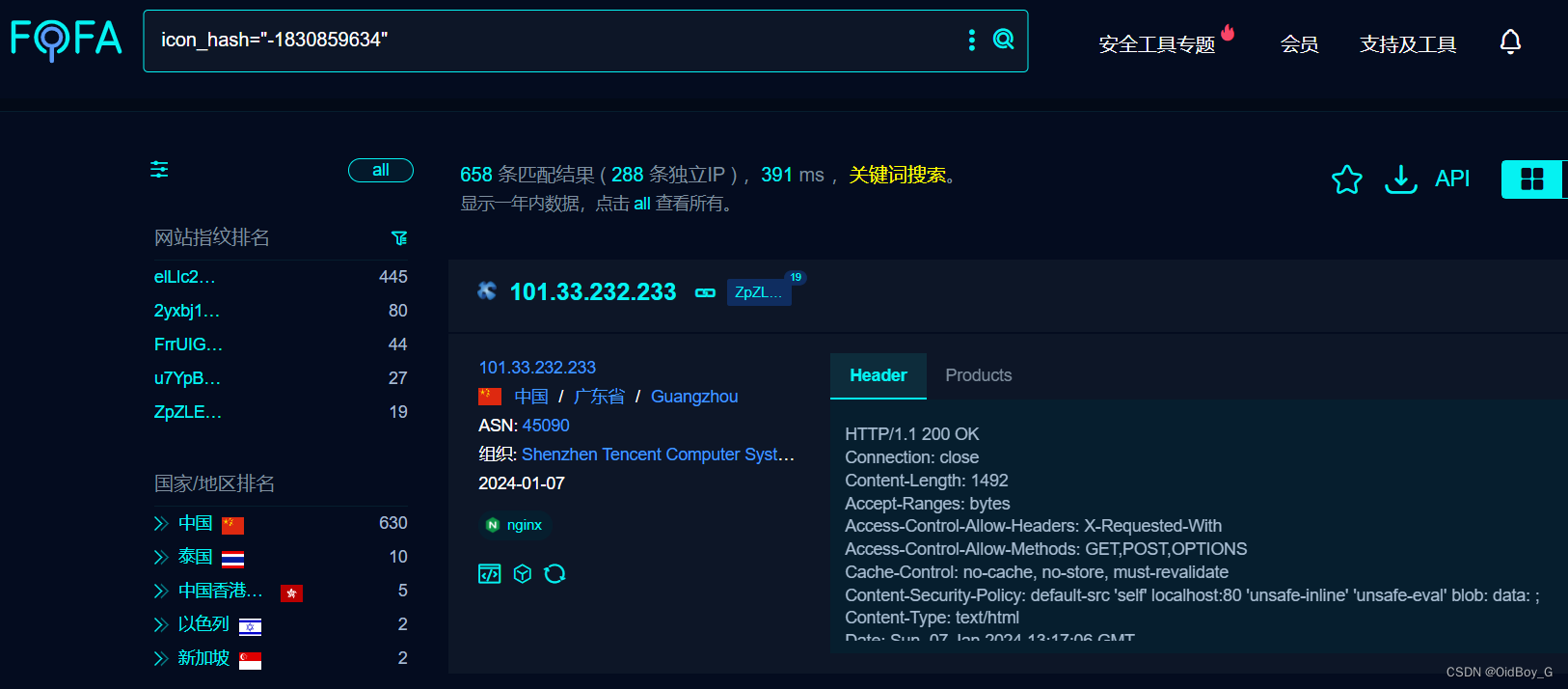
SPON世邦 IP网络对讲广播系统 多处文件上传漏洞复现
0x01 产品简介 SPON世邦IP网络对讲广播系统是一种先进的通信解决方案,旨在提供高效的网络对讲和广播功能。 0x02 漏洞概述 SPON世邦IP网络对讲广播系统 addscenedata.php、uploadjson.php、my_parser.php等接口处存在任意文件上传漏洞,未经身份验证的攻击者可利用此漏洞上…...
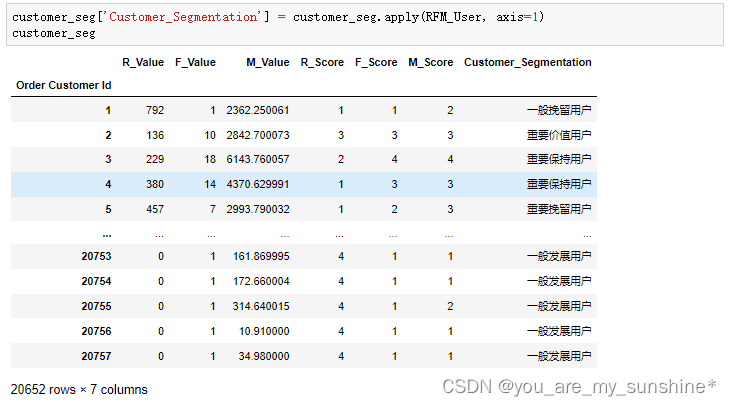
Python综合数据分析_RFM用户分层模型
文章目录 1.数据加载2.查看数据情况3.数据合并及填充4.查看特征字段之间相关性5.聚合操作6.时间维度上看销售额7.计算用户RFM8.数据保存存储(1).to_csv(1).to_pickle 1.数据加载 import pandas as pd dataset pd.read_csv(SupplyChain.csv, encodingunicode_escape) dataset2…...

【C++进阶04】STL中map、set、multimap、multiset的介绍及使用
一、关联式容器 vector/list/deque… 这些容器统称为序列式容器 因为其底层为线性序列的数据结构 里面存储的是元素本身 map/set… 这些容器统称为关联式容器 关联式容器也是用来存储数据的 与序列式容器不同的是 其里面存储的是<key, value>结构的键值对 在数据检索时…...

在 Linux 中开启 Flask 项目持续运行
在 Linux 中开启 Flask 项目持续运行 在部署 Flask 项目时,情况往往并不是那么理想。默认情况下,关闭 SSH 终端后,Flask 服务就停止了。这时,您需要找到一种方法在 Linux 服务器上实现持续运行 Flask 项目,并在服务器…...

考研个人经验总结【心理向】
客官你好 首先,不管你是以何种原因来到这篇博客,以下内容或多或少可能带给你一些启发。如果你还是大二or大三学生,有考研的打算,不妨提前了解一些考研必备的心理战术,有时候并不是你知识学得不好,而是思维…...
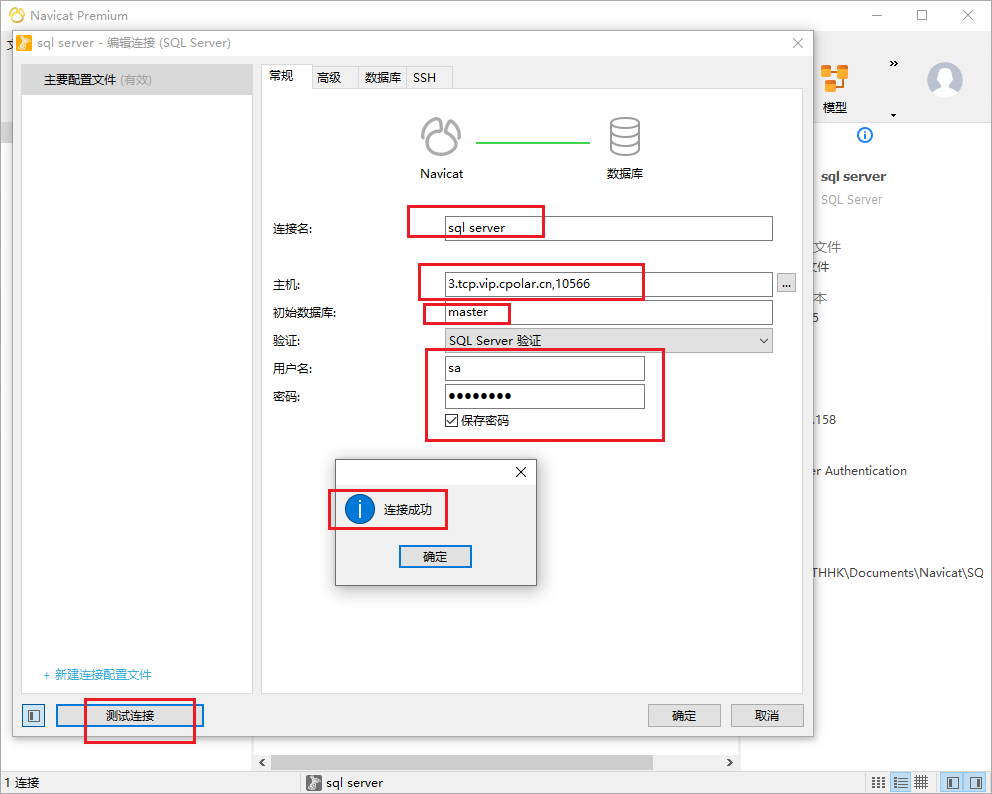
如何在CentOS安装SQL Server数据库并通过内网穿透工具实现公网访问
文章目录 前言1. 安装sql server2. 局域网测试连接3. 安装cpolar内网穿透4. 将sqlserver映射到公网5. 公网远程连接6.固定连接公网地址7.使用固定公网地址连接 前言 简单几步实现在Linux centos环境下安装部署sql server数据库,并结合cpolar内网穿透工具࿰…...

jupyter内核错误
1、在dos窗口输入以下命令激活环境:anaconda activate 【py环境名,比如py37】(目的是新家你一个虚拟环境) 2、在虚拟环境py37下安装jupyter notebook,命令:pip install jupyter notebook 3、安装ipykerne…...
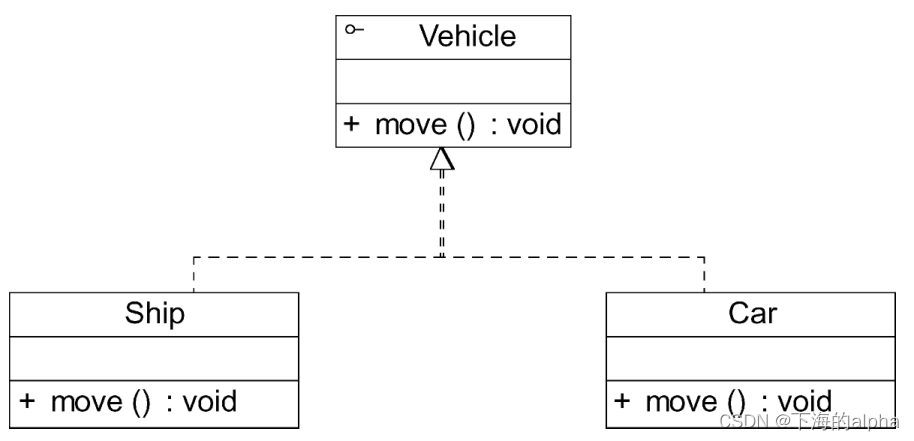
设计模式的艺术P1基础—2.3 类之间的关系
设计模式的艺术P1基础—2.3 类之间的关系 在软件系统中,类并不是孤立存在的,类与类之间存在各种关系。对于不同类型的关系,UML提供了不同的表示方式 1.关联关系 关联(Association)关系是类与类之间最常用…...

工业无人机行业研究:预计2025年将达到108.2亿美元
近年来,在技术进步和各行各业对无人驾驶飞行器 (UAV) 不断增长的需求的推动下,工业无人机市场一直在快速增长。该市场有望在未来几年继续其增长轨迹,许多关键趋势和因素推动其发展。 在全球范围内,工业无人机市场预计到 2025 年将…...

PCA主成分分析算法
在数据分析中,如果特征太多,或者特征之间的相关性太高,通常可以用PCA来进行降维。比如通过对原有10个特征的线性组合, 我们找出3个主成分,就足以解释绝大多数的方差,该算法在高维数据集中被广泛应用。 算法(…...
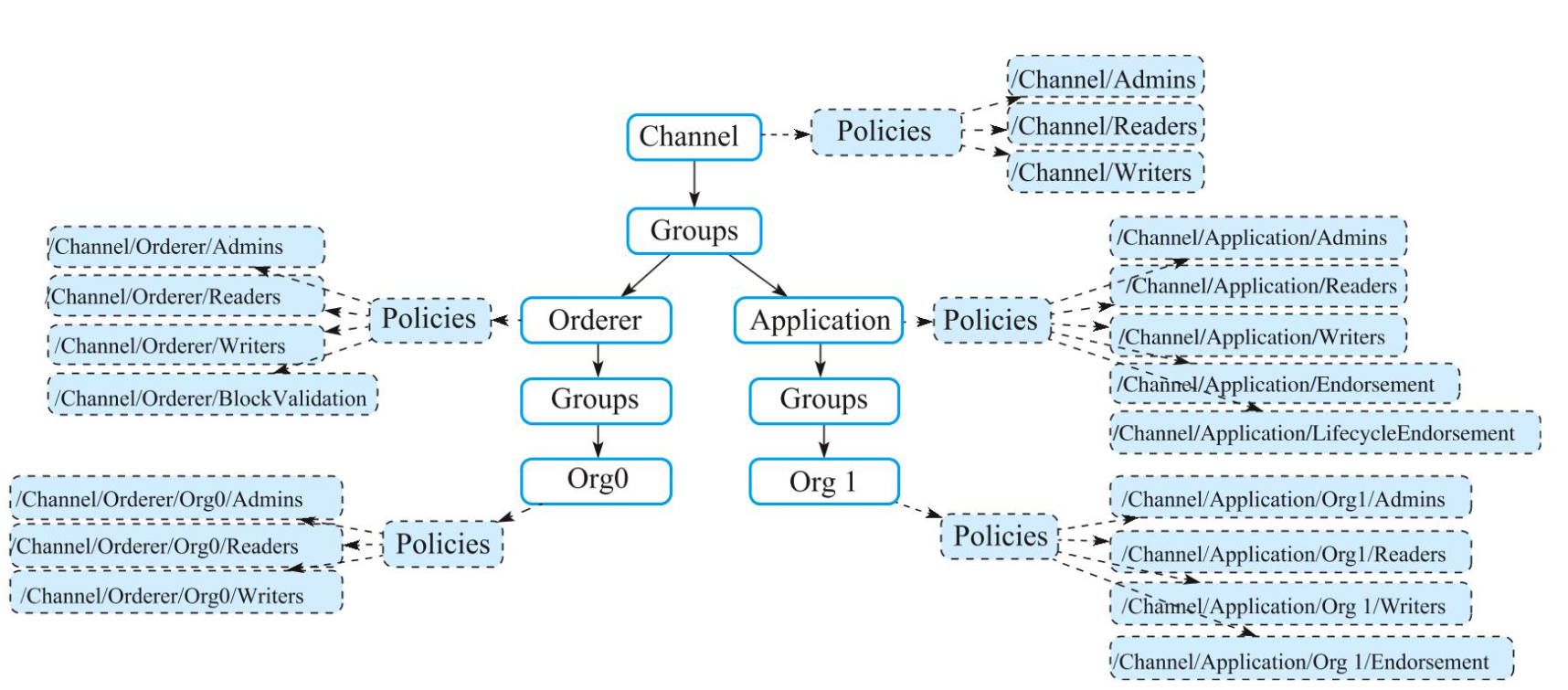
Hyperledger Fabric 权限策略和访问控制
访问控制是区块链网络十分重要的功能,负责控制某个身份在某个场景下是否允许采取某个操作(如读写某个资源)。 常见的访问控制模型包括强制访问控制(Mandatory Access Control)、自主访问控制(Discretionar…...

Day28 回溯算法part04 93. 复原IP地址 78. 子集 90. 子集 II
回溯算法part04 93. 复原IP地址 78. 子集 90. 子集 II 93. 复原 IP 地址 class Solution { private:vector<string> result;bool isValid(string& s,int start,int end){if (start > end) return false;if (s[start] 0 && start ! end) { // 0开头的数…...

QMK Toolbox终极指南:轻松掌握机械键盘固件部署与定制
QMK Toolbox终极指南:轻松掌握机械键盘固件部署与定制 【免费下载链接】qmk_toolbox A Toolbox companion for QMK Firmware 项目地址: https://gitcode.com/gh_mirrors/qm/qmk_toolbox QMK Toolbox是一款功能强大的开源键盘固件部署工具,专为QMK…...

【仅限前500名工程师】Python智能内存管理高阶训练营核心讲义:17个真实OOM案例、8种定制化GC策略、1份可审计内存SLA模板
第一章:Python智能体内存管理策略最佳实践Python智能体(如基于LLM的Agent、ReAct架构或Tool-Calling系统)在长期运行中易因对象滞留、缓存膨胀和闭包引用导致内存持续增长。高效内存管理不仅关乎稳定性,更直接影响推理延迟与并发吞…...

YOLO12与Qt结合:跨平台目标检测应用开发
YOLO12与Qt结合:跨平台目标检测应用开发 1. 引言 想象一下,你开发了一个优秀的目标检测模型,能够在各种场景下准确识别物体。但当你想要把它部署到不同设备上时,却遇到了麻烦:Windows、macOS、Linux各有各的兼容性问…...

揭秘Synopsys EDA中的AI黑科技:DSO.ai如何改变传统芯片设计流程
揭秘Synopsys EDA中的AI黑科技:DSO.ai如何重塑芯片设计范式 当芯片制程迈入3纳米时代,单个晶体管尺寸已接近物理极限,设计复杂度却呈指数级增长。传统EDA工具如同手持计算尺的工程师面对摩天大楼蓝图——方法论需要根本性变革。这正是DSO.ai诞…...

如何通过Qwen Code多语言功能提升开发效率
如何通过Qwen Code多语言功能提升开发效率 【免费下载链接】qwen-code Qwen Code is a coding agent that lives in the digital world. 项目地址: https://gitcode.com/GitHub_Trending/qw/qwen-code Qwen Code作为一款智能编程助手,其强大的多语言支持功能…...

别再死记硬背了!用‘神经元工作原理’理解你背单词为什么总忘
别再死记硬背了!用‘神经元工作原理’理解你背单词为什么总忘 背单词时总是前脚记后脚忘?这其实不是记忆力的问题,而是方法的问题。我们的大脑就像一台精密的生物计算机,而记忆的形成和巩固遵循着特定的神经科学规律。理解这些规…...

从零开始:LabelImg图像标注工具的完整实战指南
从零开始:LabelImg图像标注工具的完整实战指南 【免费下载链接】labelImg LabelImg is now part of the Label Studio community. The popular image annotation tool created by Tzutalin is no longer actively being developed, but you can check out Label Stu…...

YOLOv8在智慧农业中的落地实践:如何提升植物病害检测准确率到90%+
YOLOv8在智慧农业中的落地实践:如何提升植物病害检测准确率到90% 在智慧农业领域,植物病害的早期识别与精准诊断一直是技术攻关的重点。传统人工检测方式不仅效率低下,而且受限于专家经验,难以实现规模化应用。随着计算机视觉技术…...

Redis非主键索引查询实践,网友推荐:高效数据检索新方案
最近,关于使用Redis进行非主键查询的话题在开发者社区中引起了新的讨论。2024年7月,有技术博主分享了一套基于Redis Sorted Set和Hash的组合索引方案,声称在处理千万级用户数据的场景下,查询延迟降低了近70%。同年早些时候&#x…...

LiTmall:Java全栈电商系统的架构解密与实战应用
LiTmall:Java全栈电商系统的架构解密与实战应用 【免费下载链接】litemall linlinjava/litemall: LiTmall 是一个基于Spring Boot MyBatis的轻量级Java商城系统,适合中小型电商项目作为基础框架,便于快速搭建电子商务平台。 项目地址: htt…...