[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Ch02动态系统建模与分析
- 1. 课程介绍
- 2. 电路系统建模、基尔霍夫定律
- 3. 流体系统建模
- 4. 拉普拉斯变换(Laplace)传递函数、微分方程
- 4.1 Laplace Transform 拉式变换
- 4.2 收敛域(ROC)与逆变换(ILT)
- 4.3 传递函数 Transfer Function
- 5. 一阶系统的单位阶跃响应(step response),时间常数(Time Constant)
- 6. 频率响应与滤波器
- 7. 二阶系统
- 7.1 二阶系统对初始条件的动态响应 Matlab/Simulink - 2nd Order Syetem Response to IC
- 7.2 二阶系统的单位阶跃响应 2nd Order System Unit Step Response
- 7.3 二阶系统单位阶跃的性能分析与比较 2nd Order System Unit Step Response
- 7.4 共振现象-二阶系统频率响应,现象部分
- 7.5 二阶系统的频率响应
- 8. 二阶系统的频率响应
1. 课程介绍

2. 电路系统建模、基尔霍夫定律
基本元件:
电量 库伦( C C C) q q q
电流 安培( A A A) i i i —— i = d e d t i=\frac{\mathrm{d}e}{\mathrm{d}t} i=dtde 流速
电压 伏特( V V V) e e e
电阻 欧姆( Ω \varOmega Ω) R R R —— e R = i R e_{\mathrm{R}}=iR eR=iR
电容 法拉( F F F) C C C —— q = C e C , e C = 1 C q = 1 C ∫ 0 t i d t q=Ce_{\mathrm{C}},e_{\mathrm{C}}=\frac{1}{C}q=\frac{1}{C}\int_0^t{i}\mathrm{d}t q=CeC,eC=C1q=C1∫0tidt
电感 亨利( H H H) L L L —— e L = L d i d t = L i ′ e_{\mathrm{L}}=L\frac{\mathrm{d}i}{\mathrm{d}t}=Li^{\prime} eL=Ldtdi=Li′

基尔霍夫定律
K(Kirchhoff) C(Current) L(Law) —— 所有进入某节点的电流的总和等于所有离开这个节点的的电流总和
K(Kirchhoff) V(Voltage) L(Law) —— 沿着闭合回路所有元件两端的电压的代数和等于零

 )
)
3. 流体系统建模

流量 flow rate q q q m 3 / s m^3/s m3/s
体积 volume V V V m 3 m^3 m3
高度 heigh h h h m m m
压强 pressure p p p N / m ( p a s c a l ) N/m\left( pascal \right) N/m(pascal)
静压 Hydrostatic Pressure p H y d r o = F H y d r o A = m g A = ρ g h p_{\mathrm{Hydro}}=\frac{F_{\mathrm{Hydro}}}{A}=\frac{mg}{A}=\rho gh pHydro=AFHydro=Amg=ρgh
绝对压强 Asolute Pressure p a b s = p a + p H y d r o = p a + ρ g h p_{abs}=p_{\mathrm{a}}+p_{\mathrm{Hydro}}=p_{\mathrm{a}}+\rho gh pabs=pa+pHydro=pa+ρgh
表压 Gauge Pressure P g a u g e = p a b s − p a = ρ g h P_{\mathrm{gauge}}=p_{abs}-p_{\mathrm{a}}=\rho gh Pgauge=pabs−pa=ρgh
流阻 Fluid Resistance

质量守恒 Conservation of Mass

4. 拉普拉斯变换(Laplace)传递函数、微分方程
4.1 Laplace Transform 拉式变换
f ( t ) → F ( s ) f\left( t \right) \rightarrow F\left( s \right) f(t)→F(s) : 时域 - 频域 s = σ + j w s=\sigma +jw s=σ+jw





4.2 收敛域(ROC)与逆变换(ILT)


微分方程——描述动态世界
状态变量 : d x ⃗ d t \frac{\mathrm{d}\vec{x}}{\mathrm{d}t} dtdx-时间
位移: s s s , 速度: d x d t \frac{\mathrm{d}x}{\mathrm{d}t} dtdx ,加速度: d 2 x d t 2 \frac{\mathrm{d}^2x}{\mathrm{d}t^2} dt2d2x
- F = m d 2 x d t 2 F=m\frac{\mathrm{d}^2x}{\mathrm{d}t^2} F=mdt2d2x
- d T d t = − k ( T − C ) \frac{\mathrm{d}T}{\mathrm{d}t}=-k\left( T-C \right) dtdT=−k(T−C)
- d P d t = − r p ( 1 − p k ) \frac{\mathrm{d}P}{\mathrm{d}t}=-rp\left( 1-\frac{p}{k} \right) dtdP=−rp(1−kp) 人口增长
常系数线性 —— 线性时不变系统
- 求解 3Step
从 t t t— s s s L [ f ( t ) ] \mathcal{L} \left[ f\left( t \right) \right] L[f(t)]
运算求解
从 s s s— t t t L − 1 [ F ( s ) ] \mathcal{L} ^{-1}\left[ F\left( s \right) \right] L−1[F(s)]
非线性
- 线性化
- 非线性分析控制

4.3 传递函数 Transfer Function
——根轨迹 BodePlot 信号处理


5. 一阶系统的单位阶跃响应(step response),时间常数(Time Constant)

换个角度分析单位阶跃响应(System Unit Step Response - 一阶 1st order)——LTI
一阶线性时不变 —— 1st order LTI
x ˙ + a x = a u x ( 0 ) = x ˙ ( 0 ) = 0 \dot{x}+ax=au \\ x\left( 0 \right) =\dot{x}\left( 0 \right) =0 x˙+ax=aux(0)=x˙(0)=0
传递函数 : s X ( s ) + a X ( s ) = a U ( s ) ; H ( s ) = X ( s ) U ( s ) = a s + a sX\left( s \right) +aX\left( s \right) =aU\left( s \right) ;H\left( s \right) =\frac{X\left( s \right)}{U\left( s \right)}=\frac{a}{s+a} sX(s)+aX(s)=aU(s);H(s)=U(s)X(s)=s+aa

Another Viewpoint : x ˙ + a x = a u , t ⩾ 0 , u = 1 ⇒ x ˙ = a − a x = a ( 1 − x ) \dot{x}+ax=au,t\geqslant 0,u=1\Rightarrow \dot{x}=a-ax=a\left( 1-x \right) x˙+ax=au,t⩾0,u=1⇒x˙=a−ax=a(1−x)

6. 频率响应与滤波器




1st order system 一阶系统

低通滤波器——Loss Pass Filter

7. 二阶系统
7.1 二阶系统对初始条件的动态响应 Matlab/Simulink - 2nd Order Syetem Response to IC
Vibration 振动



7.2 二阶系统的单位阶跃响应 2nd Order System Unit Step Response

Unit Step Imput 单位阶跃


7.3 二阶系统单位阶跃的性能分析与比较 2nd Order System Unit Step Response


7.4 共振现象-二阶系统频率响应,现象部分

7.5 二阶系统的频率响应

8. 二阶系统的频率响应

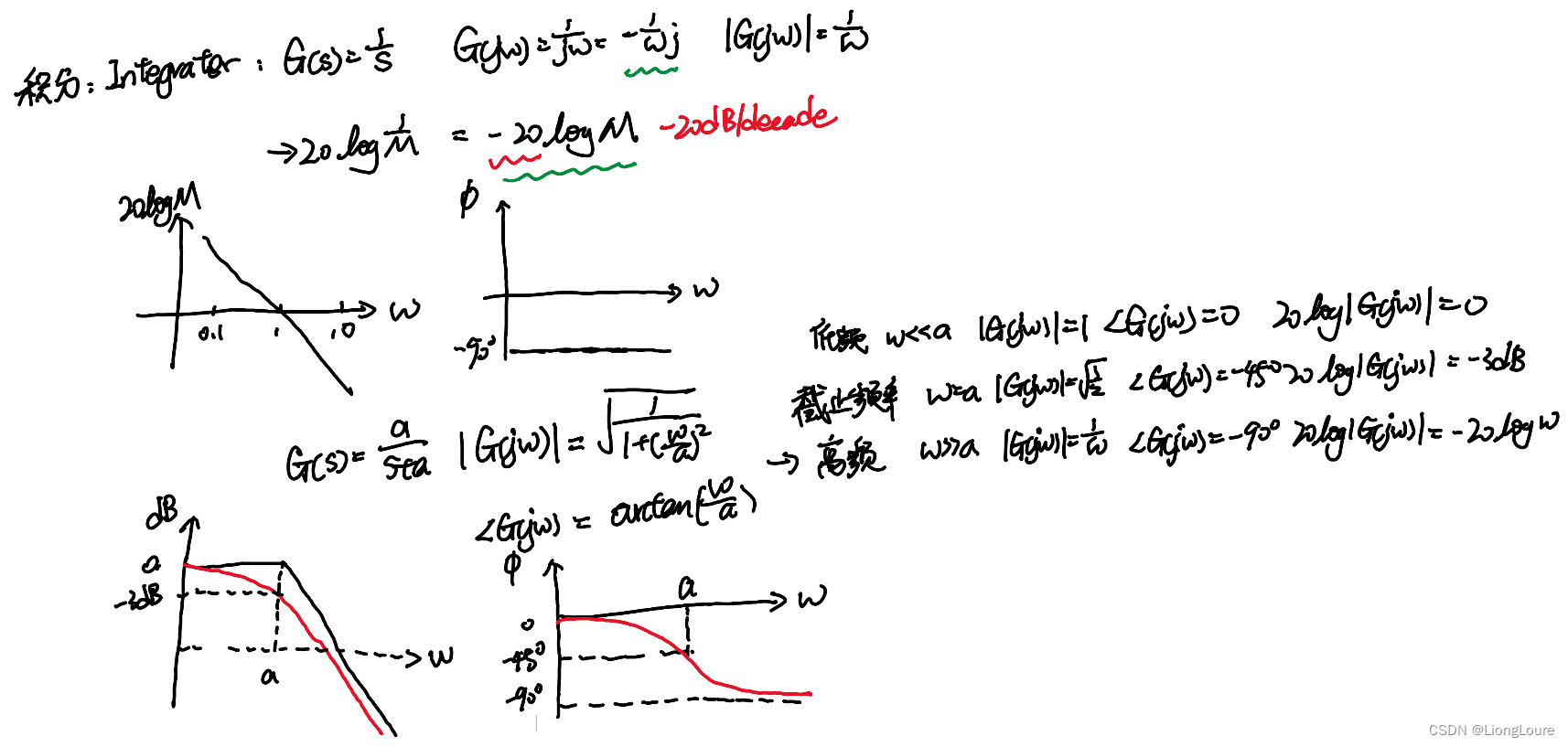
Bode Plot 手绘技巧与应用


相关文章:
[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Ch02动态系统建模与分析 1. 课程介绍2. 电路系统建模、基尔霍夫定律3. 流体系统建模4. 拉普拉斯变换(Laplace)传递函数、微分方程4.1 Laplace Transform 拉式变换4.2 收…...

【一周年创作总结】人生是远方的无尽旷野呀
那一眼瞥见的伟大的灵魂,却似模糊的你和我 文章目录 📒各个阶段的experience🔎大一寒假🔎大一下学期🔎大一暑假🔎大二上学期(现在) 🍔相遇CSDN🛸自媒体&#…...
金融帝国实验室(Capitalism Lab)V10版本游戏平衡性优化与改进
即将推出的V10版本中的各种游戏平衡性优化与改进: ————————————— 一、当玩家被提议收购一家即将破产的公司时,显示商业秘密。 当一家公司濒临破产,玩家被提议收购该公司时,如果玩家有兴趣评估该公司,则无…...

[SpringBoot]接口的多实现:选择性注入SpringBoot接口的实现类
最近在项目中遇到两种情况,准备写个博客记录一下。 情况说明:Service层一个接口是否可以存在多个具体实现,此时应该如何调用Service(的具体实现)? 其实之前的项目中也遇到过这种情况,只不过我采…...
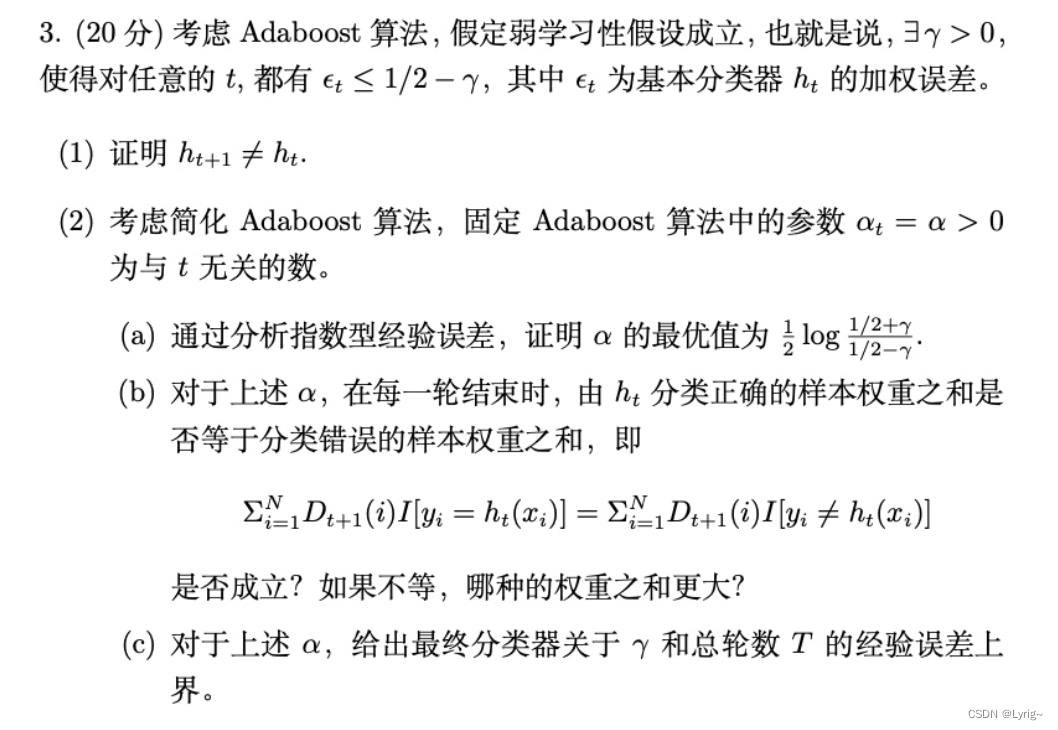
北京大学 wlw机器学习2022春季期末试题分析
北京大学 wlw机器学习2022春季期末试题分析 前言新的开始第一题第二题第三题 前言 你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Markdown的基本语法知识。 新的开始 第…...
)
前端文件下载方法(包含get和post)
export const downloadFileWithIframe (url, name) > {const iframe document.createElement(iframe);iframe.style.display none; // 防止影响页面iframe.style.height 0; // 防止影响页面iframe.name name;iframe.src url;document.body.appendChild(iframe); // 这…...
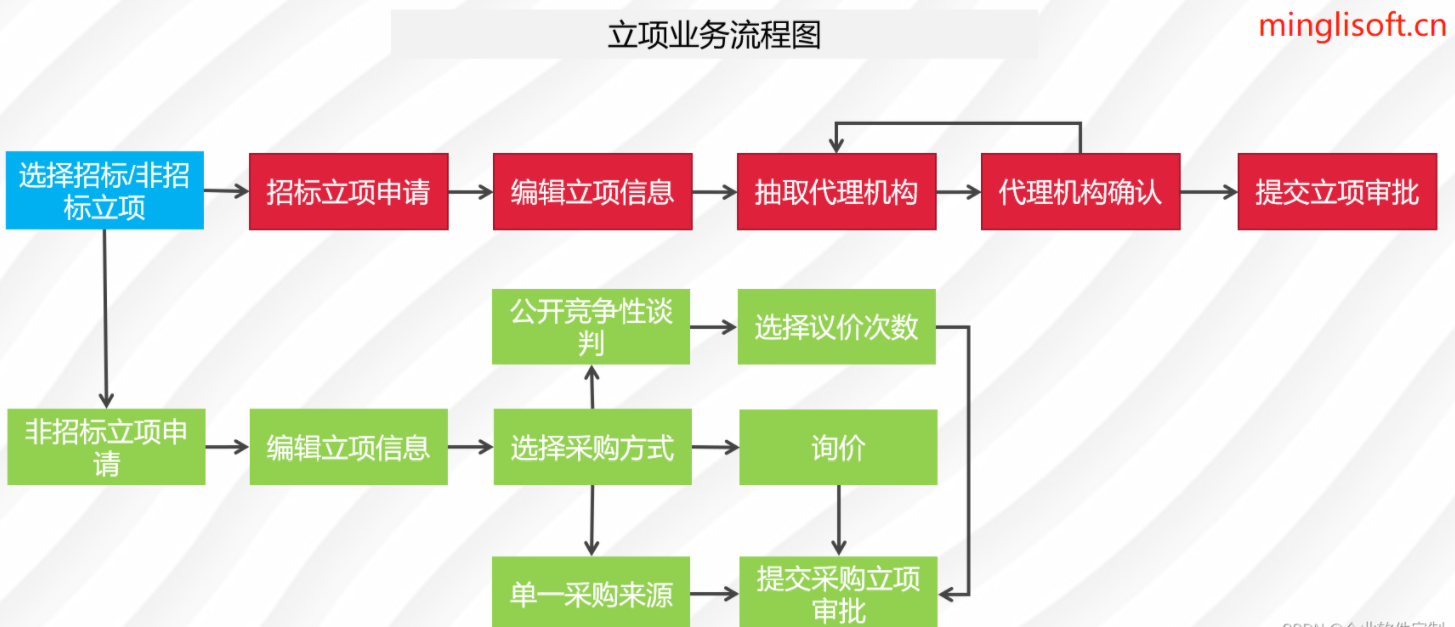
高性能、可扩展、支持二次开发的企业电子招标采购系统源码
在数字化时代,企业需要借助先进的数字化技术来提高工程管理效率和质量。招投标管理系统作为企业内部业务项目管理的重要应用平台,涵盖了门户管理、立项管理、采购项目管理、采购公告管理、考核管理、报表管理、评审管理、企业管理、采购管理和系统管理等…...

2645. 构造有效字符串的最少插入数
Problem: 2645. 构造有效字符串的最少插入数 文章目录 解题思路解决方法复杂度分析代码实现 解题思路 解决此问题需要确定如何以最小的插入次数构造一个有效的字符串。首先,我们需要确定开头的差距,然后决定中间的补足,最后决定末尾的差距。…...
C#,快速排序算法(Quick Sort)的非递归实现与数据可视化
排序算法是编程的基础。 常见的四种排序算法是:简单选择排序、冒泡排序、插入排序和快速排序。其中的快速排序的优势明显,一般使用递归方式实现,但遇到数据量大的情况则无法适用。实际工程中一般使用“非递归”方式实现。 快速排序(Quick Sor…...
【操作系统xv6】学习记录2 -RISC-V Architecture
说明:看完这节,不会让你称为汇编程序员,知识操作系统的前置。 ref:https://binhack.readthedocs.io/zh/latest/assembly/mips.html https://www.bilibili.com/video/BV1w94y1a7i8/?p7 MIPS MIPS的意思是 “无内部互锁流水级的微…...
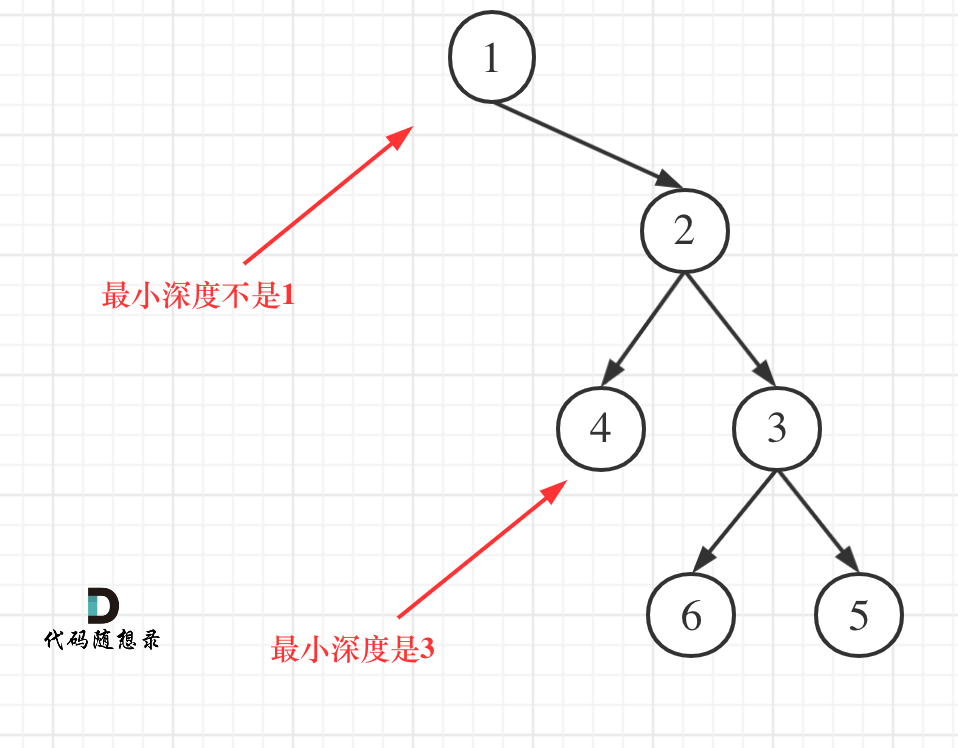
C++力扣题目111--二叉树的最小深度
力扣题目链接(opens new window) 给定一个二叉树,找出其最小深度。 最小深度是从根节点到最近叶子节点的最短路径上的节点数量。 说明: 叶子节点是指没有子节点的节点。 示例: 给定二叉树 [3,9,20,null,null,15,7], 返回它的最小深度 2 思路 看完了这篇104.二…...
)
【图像拼接】源码精读:Adaptive As-Natural-As-Possible Image Stitching(AANAP/ANAP)
第一次来请先看这篇文章:【图像拼接(Image Stitching)】关于【图像拼接论文源码精读】专栏的相关说明,包含专栏内文章结构说明、源码阅读顺序、培养代码能力、如何创新等(不定期更新) 【图像拼接论文源码精读】专栏文章目录 【源码精读】As-Projective-As-Possible Imag…...

解决docker run报错:Error response from daemon: No command specified.
将docker镜像export/import之后,对新的镜像执行docker run时报错: docker: Error response from daemon: No command specified. 解决方法: 方案1: 查看容器的command: docker ps --no-trunc 在docker run命令上增加…...

算法第十二天-最大整除子集
最大整除子集 题目要求 解题思路 来自[宫水三叶] 根据题意:对于符合要求的[整除子集]中的任意两个值,必然满足[较大数]是[较小数]的倍数 数据范围是 1 0 3 10^3 103,我们不可能采取获取所有子集,再检查子集是否合法的暴力搜解法…...

简单易懂的PyTorch 损失函数:优化机器学习模型的关键
目录 torch.nn子模块Loss Functions详解 nn.L1Loss 用途 用法 使用技巧 注意事项 代码示例 nn.MSELoss 用途 用法 使用技巧 注意事项 代码示例 nn.CrossEntropyLoss 用途 用法 使用技巧 注意事项 代码示例 使用类别索引 使用类别概率 nn.CTCLoss 用途 …...

Kubernetes/k8s的存储卷/数据卷
k8s的存储卷/数据卷 容器内的目录和宿主机的目录挂载 容器在系统上的生命周期是短暂的,delete,k8s用控制创建的pod,delete相当于重启,容器的状态也会回复到初始状态 一旦回到初始状态,所有的后天编辑的文件都会消失…...

【漏洞复现】锐捷RG-UAC统一上网行为管理系统信息泄露漏洞
Nx01 产品简介 锐捷网络成立于2000年1月,原名实达网络,2003年更名,自成立以来,一直扎根行业,深入场景进行解决方案设计和创新,并利用云计算、SDN、移动互联、大数据、物联网、AI等新技术为各行业用户提供场…...
)
Android - 串口通讯(SerialPort)
最早的博客Android 模拟串口通信过程_launch virtual serial port driver pro-CSDN博客里就是用过 Google 提供的 demo,最近想再写个其他的demo发现用起来有点麻烦,还需要导入其他 module,因此在网上找到了Android-SerialPort-API: https://g…...

如何使用設置靜態住宅IP
靜態住宅IP就是一種靜態的、分配給住宅用戶的IP地址。與動態IP地址不同,靜態住宅IP一旦分配給用戶,就會一直保持不變,除非ISP(Internet Service Provider,互聯網服務提供商)進行手動更改。那麼,…...
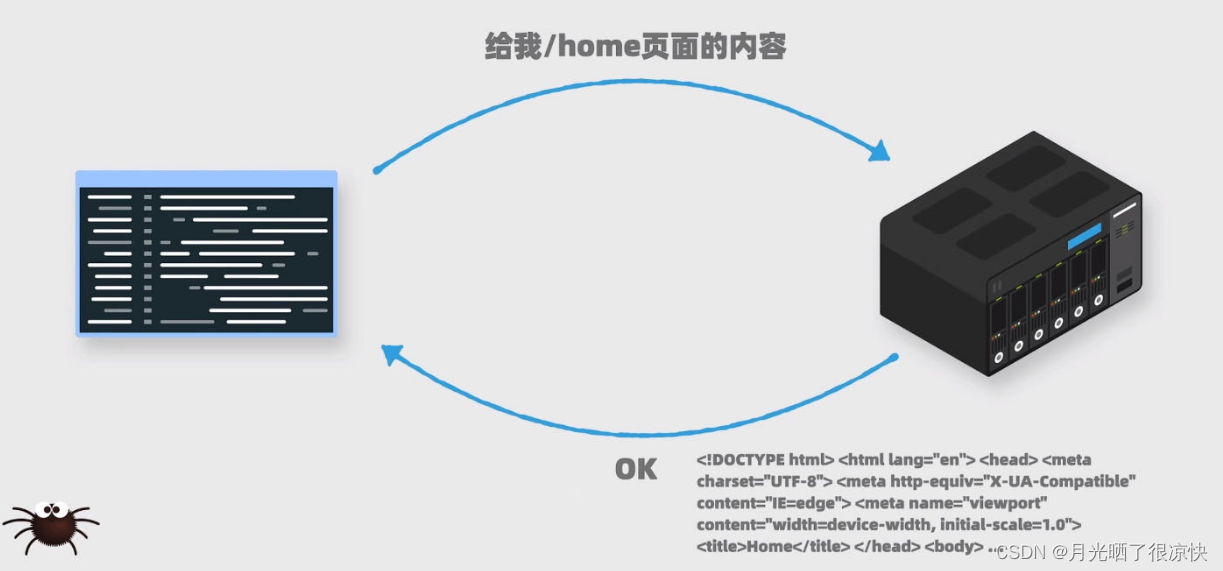
在学习爬虫前的准备
1. 写一个爬虫程序需要分几步 获取网页内容。 我们会通过代码给一个网站服务器发送请求,它会返回给我们网页上的内容。 在我们平时使用浏览器访问服务器内容是,本质上也是向服务器发送一个请求,然后服务器返回网页上的内容。只不过浏览器还会…...

远程控制软件哪个好 远程控制软件推荐用无界趣连2.0
不管是想用手机串流玩端游,还是朋友、家人遇到设备难题需要免费远程协助,一款好用的远程控制软件都能帮上大忙。想找到一款靠谱的远程控制软件并不容易,推荐无界趣连2.0,不管是游戏娱乐还是应急协助,都能轻松满足需求&…...

Haneke最佳实践:10个技巧让你的图片缓存更高效
Haneke最佳实践:10个技巧让你的图片缓存更高效 【免费下载链接】Haneke A lightweight zero-config image cache for iOS, in Objective-C. 项目地址: https://gitcode.com/gh_mirrors/ha/Haneke Haneke是一款适用于iOS平台的轻量级零配置图片缓存库…...
构建企业级数据集成管道)
从零到一:基于Kettle(PDI)构建企业级数据集成管道
1. 企业级数据集成为何选择Kettle? 第一次接触Kettle(现在官方称为Pentaho Data Integration)是在2013年一个银行数据迁移项目上。当时客户需要将分散在20多个业务系统中的客户数据整合到新建的数据仓库,项目组评估了多个ETL工具后…...

STC8H8K64U USB下载避坑指南:实测与手册不一样的P3.2引脚操作细节
STC8H8K64U USB下载实战:破解P3.2引脚的操作玄机 第一次接触STC8H8K64U的USB下载功能时,本以为按照官方手册按部就班就能轻松搞定,没想到实际操作中P3.2引脚的行为完全出乎意料。这个看似简单的接地操作背后,隐藏着芯片内部状态机…...

Arm Compiler 6.16LTS功能安全认证语言扩展解析
1. Arm Compiler for Embedded FuSa 6.16LTS语言扩展支持现状解析在功能安全关键型嵌入式系统开发中,编译器工具链的认证状态直接关系到最终产品的合规性。Arm Compiler for Embedded FuSa 6.16LTS作为经过功能安全认证的工具链,其语言扩展支持情况需要开…...
)
别再为导入报错发愁了!手把手教你用Parasolid格式把SolidWorks模型完美导入Adams(附常见错误排查)
从SolidWorks到Adams的模型导入实战指南:避坑技巧与深度解析 在工程仿真领域,SolidWorks和Adams的组合堪称黄金搭档——前者负责精确建模,后者专精多体动力学分析。但这对"黄金组合"的第一次握手往往让工程师们抓狂:模型…...

AI智能体的测试
测试AI智能体(AI Agent)与测试传统的确定性软件有本质的区别。传统软件测试关注的是“输入 A,是否必然输出 B”;而 AI Agent 具备自主规划、工具调用、长期记忆和非确定性生成的能力,这导致它的测试维度更广、复杂度更…...

AI编程时代下,如何通过Cursor-Crisis项目重拾代码编辑基本功
1. 项目概述:当AI编程助手遇上“光标危机”最近在GitHub上看到一个挺有意思的项目,叫“Cursor-Crisis”。光看名字,你可能会觉得这是个关于文本编辑器光标的小工具,或者是个游戏。但点进去一看,才发现它精准地戳中了一…...

AI 视频创作系统:新媒体高效增收工具,AI 自动成片,持续输出优质内容
一、新媒体行业增收难,传统创作模式遇瓶颈如今做新媒体账号想要稳定盈利,离不开高频优质内容输出。但多数从业者普遍面临诸多难题:人工写脚本耗时费力,实拍剪辑流程繁琐,长期聘请专职人员开支巨大;内容产出…...

Multisim导入自定义三极管S8050/S8550保姆级教程:从SPICE文件到成功仿真
Multisim实战:从零构建S8050三极管模型与仿真验证全流程 在电子电路设计与仿真领域,准确的三极管模型往往是项目成功的关键。许多工程师和爱好者在使用Multisim时都遇到过这样的困境:官方元件库中缺少特定型号的三极管(如常见的S8…...