robot_framework的robot语法与python脚本之间的语法转换
Robot Framework是一个开源的自动化测试框架,支持关键字驱动和数据驱动的测试方法。它具有简单易学的语法和丰富的库,可以与多种语言进行集成,包括Python。
1. robot 的关键字
Robot Framework 是一个用于自动化测试和自动化任务的开源框架。它使用简洁的关键字驱动的语法,支持多种扩展库和插件,以及跨平台的运行环境。
以下是 Robot Framework 的常见语法和关键字含义的概述:
测试用例组织:
*** Settings ***:全局设置区块。
*** Variables ***:定义变量区块。
*** Test Cases ***:定义测试用例区块。
*** Keywords ***:定义关键字区块。
关键字定义:
Keyword Name:定义一个自定义关键字。
${var_name} 或者 @{list_name}:定义变量或列表。
Run Keyword:调用其他关键字执行。
Arguments:关键字的参数定义。
测试用例定义:
Test Case Name:定义一个测试用例。
Documentation:用于给测试用例添加文档说明。
Tags:为测试用例添加标签。
Setup:定义每个测试用例的前置条件。
Teardown:定义每个测试用例的后置条件。
断言和验证:
Should Be Equal:判断两个值是否相等。
Should Be True:判断给定的表达式的值是否为真。
Should Be False:判断给定的表达式的值是否为假。
Should Contain:判断一个字符串是否包含另一个字符串。
Should Match:使用正则表达式匹配字符串。
条件和循环:
Run Keyword If:根据条件判断是否执行关键字。
Run Keyword Unless:根据条件判断是否不执行关键字。
Run Keyword If All Critical Tests Passed:当所有关键测试通过时执行关键字。
Repeat Keyword:重复执行某个关键字。
文件和日志:
Create File:创建文件。
Delete File:删除文件。
Append To File:向文件中追加内容。
Log:输出日志信息。
以上仅是 Robot Framework 的一部分语法和关键字的示例,还有很多其他功能和扩展库可以使用。如果需要更详细的语法和关键字说明,建议查阅 Robot Framework 官方文档(https://robotframework.org/)。
关于使用 Python 代码语法转换为 Robot Framework 语法,你可以使用 Robot Framework 提供的 SeleniumLibrary、RequestsLibrary 等库进行自动化测试的编写。具体的代码案例可以参考这些库的官方文档和示例。
2.Robot Framework的语法包括以下几个部分:
-
Settings(设置):配置测试环境和引入相关文件
示例:
*** Settings *** Documentation This is a sample test suite. Library SeleniumLibrary Suite Setup Open Browser https://www.example.com chrome Suite Teardown Close Browser -
Variables(变量):定义全局或局部变量,方便在测试中重复使用
示例:
*** Variables *** ${USERNAME} example_user ${PASSWORD} example_password*** Test Cases *** Valid LoginInput Text username_field ${USERNAME}Input Password password_field ${PASSWORD}Click Button login_button -
Test Cases(测试用例):定义具体的测试步骤和断言
示例:
*** Test Cases *** Login with valid credentials[Documentation] This is a sample test case.[Tags] SmokeOpen Browser https://www.example.com chromeInput Text username_field ${USERNAME}Input Password password_field ${PASSWORD}Click Button login_buttonPage Should Contain Element welcome_messageLogout[Documentation] This is another sample test case.[Tags] SmokeLog Logging out from the application.Click Element logout_buttonPage Should Contain Element login_button -
Keywords(关键字):定义可重复使用的测试步骤
示例:
*** Keywords *** Input Text[Arguments] ${locator} ${text}Input Text ${locator} ${text}Input Password[Arguments] ${locator} ${text}Input Password ${locator} ${text}Click Button[Arguments] ${locator}Click Button ${locator}Page Should Contain Element[Arguments] ${locator}Page Should Contain Element ${locator}Click Element[Arguments] ${locator}Click Element ${locator}
以上是Robot Framework的基本语法,可以根据具体需求进行扩展和定制。关于将Python的class和方法转换为Robot Framework的语法代码,可以按照以下方式操作:
-
将Python类转换为Robot Framework的库(Library)
示例:
class MyLibrary:ROBOT_LIBRARY_VERSION = 1.0def __init__(self):passdef keyword_one(self, arg1, arg2):# Python code herepassdef keyword_two(self, arg1, arg2):# Python code herepass转换为Robot Framework的库:
*** Settings *** Library MyLibrary*** Test Cases *** Example Test CaseKeyword One arg1 arg2Keyword Two arg1 arg2 -
将Python类中的方法转换为Robot Framework的自定义关键字
示例:
class MyLibrary:ROBOT_LIBRARY_VERSION = 1.0def __init__(self):passdef _internal_method(self):# Python code herepassdef keyword_one(self, arg1, arg2):self._internal_method()# Python code herepassdef keyword_two(self, arg1, arg2):self._internal_method()# Python code herepass转换为Robot Framework的关键字:
*** Keywords *** Keyword One[Arguments] ${arg1} ${arg2}MyLibrary.Keyword One ${arg1} ${arg2}Keyword Two[Arguments] ${arg1} ${arg2}MyLibrary.Keyword Two ${arg1} ${arg2}*** Test Cases *** Example Test CaseKeyword One arg1 arg2Keyword Two arg1 arg2
以上是将Python的类和方法转换为Robot Framework的语法代码案例。请根据具体需求进行调整和定制。
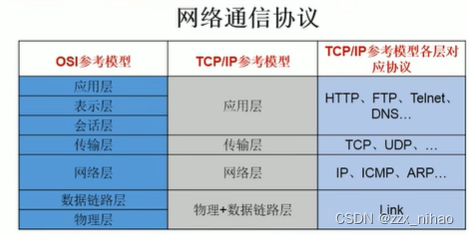
3. Robot关键字库是按照一定的分类进行的
- Builtln
变量定义、循环控制、数据计算、进制转换、断言判断、日志等等 - Collections
处理python列表和字典的相关操作 - DateTime
处理日期和时间转换的相关操作 - Dialogs
提供暂停执行和获取用户输入的方法 - OperatingSystem
提供和操作系统相关的关键字 - Process
操作进程相关的关键字,比如运行一个 .py脚本
Invoke Python Script
${result} Run Process python test.py - Remote
特殊库充当 Robot Framework 和其他地方的库之间的代理。实际的库可以在不同的机器上运行, 并且可以使用任何支持 XML-RPC 协议的编程语言来实现 - Screenshot
提供用于截取桌面屏幕截图的关键字 - String
用于生成、修改和验证字符串的库 - Telnet
可以连接到 Telnet 服务器并在打开的连接上执行命令 - XML
用于生成、修改和验证 XML 文件的库
加粗样式疑问: robot自动化测试,一定要先使用python实现自动化脚本,才能转成robot脚本呢 可以不用写自动化脚本直接写robot脚本吗
不是必须要先使用Python实现自动化脚本,然后再转换成Robot脚本。事实上,你可以直接编写Robot Framework的脚本,而无需使用其他语言编写自动化脚本。
Robot Framework提供了一种简洁的、易于阅读和编写的语法,称为Robot语法。你可以直接使用Robot语法编写测试用例、关键字和测试套件,而无需事先编写自动化脚本。
使用Robot语法编写的脚本示例:
*** Test Cases ***
Example Test[Tags] ExampleOpen Browser https://www.example.com chromeInput Text id=txtUsername usernameInput Text id=txtPassword passwordClick Button xpath=//input[@type='submit']Page Should Contain Text Welcome, user!*** Keywords ***
Open Browser[Arguments] ${url} ${browser}# 自动化步骤实现Input Text[Arguments] ${locator} ${text}# 自动化步骤实现Click Button[Arguments] ${locator}# 自动化步骤实现Page Should Contain Text[Arguments] ${text}# 自动化断言实现
请注意,如果你需要使用Robot Framework中未提供的自定义关键字或库,那么你可能需要编写一些Python代码来支持这些功能。然而,这并不意味着你必须先实现所有的自动化脚本,然后再转换成Robot脚本。你可以根据需要在任何时候编写和使用Python代码。
总结来说,你可以直接使用Robot Framework的语法编写自动化测试脚本,不一定需要先使用Python实现自动化脚本再转成Robot脚本。
相关文章:

robot_framework的robot语法与python脚本之间的语法转换
Robot Framework是一个开源的自动化测试框架,支持关键字驱动和数据驱动的测试方法。它具有简单易学的语法和丰富的库,可以与多种语言进行集成,包括Python。 1. robot 的关键字 Robot Framework 是一个用于自动化测试和自动化任务的开源框架…...

D1675滤波器和缓冲器用于单通道6阶高清视频滤波驱动电路,可提高视频信号性能
D1675单电源工作电压为2.5V到5V,是一款高清视频信号译码、编码的滤波器和缓冲器。与使用分立元件的传统设计相比,D1675更能节省PCB板面积,并降低成本以及提高视频信号性能。D1675集成了一个直流耦合输入缓冲器、一个消除带外噪声的视频编码器…...
Java18:网络编程
一.对象序列化: 1.对象流: ObjectInputStream 和 ObjectOutputStream 2.作用: ObjectOutputSteam:内存中的对象-->存储中的文件,通过网络传输出去 ObjectInputStream:存储中的文件,通过网络传输出去…...

【Python百宝箱】模拟未见之境:精准工具畅游分子动力学风景
分子演绎:模拟工具的综合探索 前言 在当今科学研究中,分子动力学模拟成为解析原子和分子行为的关键工具之一。本文将深入探讨几种领先的分子动力学模拟工具,包括MDTraj、ASE(原子模拟环境)、OpenMM和CHARMM。这些工具…...

Vue 3面试题
Vue 3面试题 以下是一些常见的Vue 3面试题: Vue 3中的Composition API是什么?它与Options API有什么区别? 答案: Composition API是Vue 3中引入的一种新的组件设计模式,它允许开发者通过函数的形式组织和重用组件的逻…...

M-A352AD10高精度三轴加速度计
一般描述 M-A352是一种三轴数字输出加速度计,具有超低噪声、高稳定性、低功耗等特点,采用了夸特的精细处理技术。. 多功能M-A352具有高精度和耐久性,非常适合广泛的具有挑战性的应用,如SHM、地震观测、工业设备的状态监测和工业…...
(1.13) SiK无线电高级配置(七))
(1)(1.13) SiK无线电高级配置(七)
文章目录 前言 17 技术细节 18 名词解释 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 17 技术细节 在评估该无线电是否符合当地法规时,了解其使用的技术可能会有所帮…...
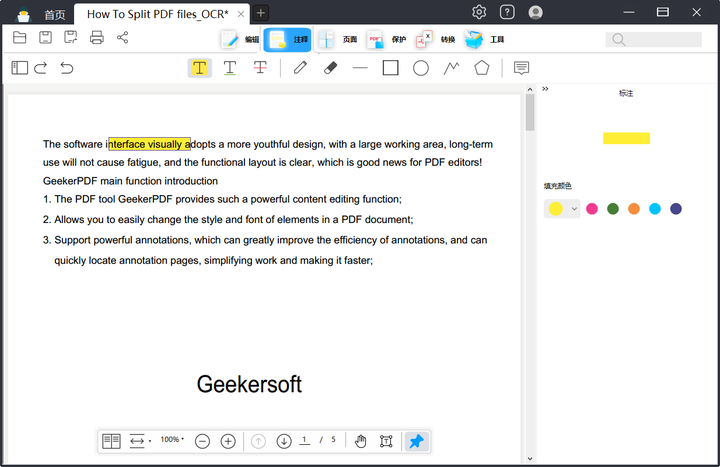
如何注释 PDF?注释PDF文件方法详情介绍
大多数使用 PDF 文档的用户都熟悉处理这种格式的文件时出现的困难。有些人仍然认为注释 PDF 的唯一方法是打印文档,使用笔或荧光笔然后扫描回来。 您可能需要向 PDF 添加注释、添加注释、覆盖一些文本或几何对象。经理、部门负责人在编辑公司内的合同、订单、发票或…...

GEE APP——基于PFI纯净森林指数的CCDC-SMA算法的长时序森林监测APP
简介 森林生态系统的碳排放受到破碎化加速和边缘效应的极大影响。要了解这些影响,就必须准确监测破碎化森林景观的变化。然而,这些变化通常强度低、尺度小,因此很难使用中等空间分辨率的卫星图像(如 Landsat)来检测。为了应对这一挑战,本研究开发了纯林指数(PFI),该指…...

CF1446B Catching Cheaters 题解 DP
Catching Cheaters 传送门 题面翻译 给我们两个字符串,让我们从中选出两个字串,算出它们的最大公共子序列长度。然后将它乘 4 4 4在减去两个字串的长度。问你这个数最大是多少。 题目描述 You are given two strings A A A and B B B representin…...

用python实现文本/图片生成视频
使用Python来生成视频通常涉及到使用一些专门的库,比如 OpenCV 或者 moviepy。下面是一个简单的例子,使用OpenCV和PIL(Python Imaging Library)来创建一个视频。 python复制代码 import cv2 import numpy as np from PIL import …...

Android Gradle Plugin、Gradle、Android Studio版本关系
参考链接 Android Gradle Plugin 与 gradle 对应关系 插件版本所需的最低 Gradle 版本8.38.48.28.28.18.08.08.07.47.57.37.47.27.3.37.17.27.07.04.2.06.7.14.1.06.54.0.06.1.13.6.0 - 3.6.45.6.43.5.0 - 3.5.45.4.13.4.0 - 3.4.35.1.13.3.0 - 3.3.34.10.13.2.0 - 3.2.14.63…...

PyTorch深度学习实战(30)——Deepfakes
PyTorch深度学习实战(30)——Deepfakes 0. 前言1. Deepfakes 原理2. 数据集分析3. 使用 PyTorch 实现 Deepfakes3.1 random_warp.py3.2 Deepfakes.py 小结系列链接 0. 前言 Deepfakes 是一种利用深度学习技术生成伪造视频和图像的技术。它通过将一个人的…...

java 修改JsonObject对象所有的Value类型为String
将JSONObject 或者JSONArray 中所有Value 为数值类型 转为String. 转换前: [{"zjlx": 201,"xm": "刘**","cbdjxxlist": [{"zspmdm": 102031201,"rybm": "43000010300000411195","jfrlx": 1…...

Vue3-47-Pinia-修改全局状态变量值的方式
说明 修改全局状态变量的值,是一个比较常规而且常见的操作。 本文就介绍四种常见的操作。 由于Option Store 和Setup Store 在修改的时候略有不同,所以本文也会将不同点体现一下。 全局状态变量的定义 包含了 Option Store 和Setup Store 两种定义方式&a…...

【Scala】——面向对象
1 Scala 包 1.1 包风格 Scala 有两种包的管理风格。 第一种 Java 的包管理风格相同,每个源文件一个包(包 名和源文件所在路径不要求必须一致),包名用“.”进行分隔以表示包的层级关系,如 com.atguigu.scala。另一种风…...

【MediaFoundation】OpenCV VideoCapture 读取音频源码
OpenCV 读取音频代码实例 在windows7 以及OpenCV4 过后可以使用 CAP_MSMF 读取音频,但是OpenCV没有播放音频的API。代码示例如下。 本文解析OpenCVCAP_MSMF 进行文件、设备的 音频读取,学习MediaFoundation 的使用。 #include <opencv2/core.hpp>…...

2024秋招,百度测试开发工程师一面
前言 大家好,今天我来回顾一下秋招中的一场很重要技术面试 一面面试官深挖我的项目经历,并提出了很多的实际场景,我现在回顾依然有很多新的认识 过程 自我介绍实习工作中,做得最好的地方是什么? 我先介绍了一下实习…...
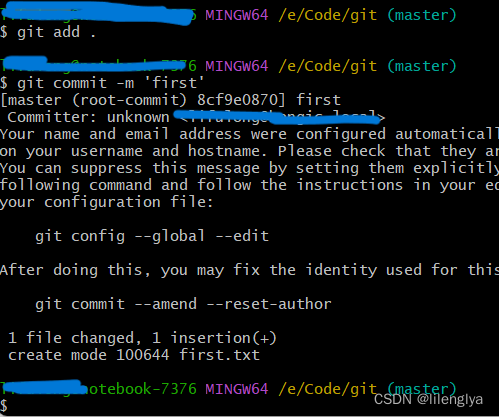
Git 使用与问题记录 二(公司快速上手版)
写在前面 记录自己学习的内容,方便后面忘记的时候查看。给像我一样的新手提供一点参考 正文 上一章已经安装好了Git,如何使用呢。我这里会分享两种办法,第一种是在VS2022中克隆代码,修改和提交;第二种是用命令提交。…...
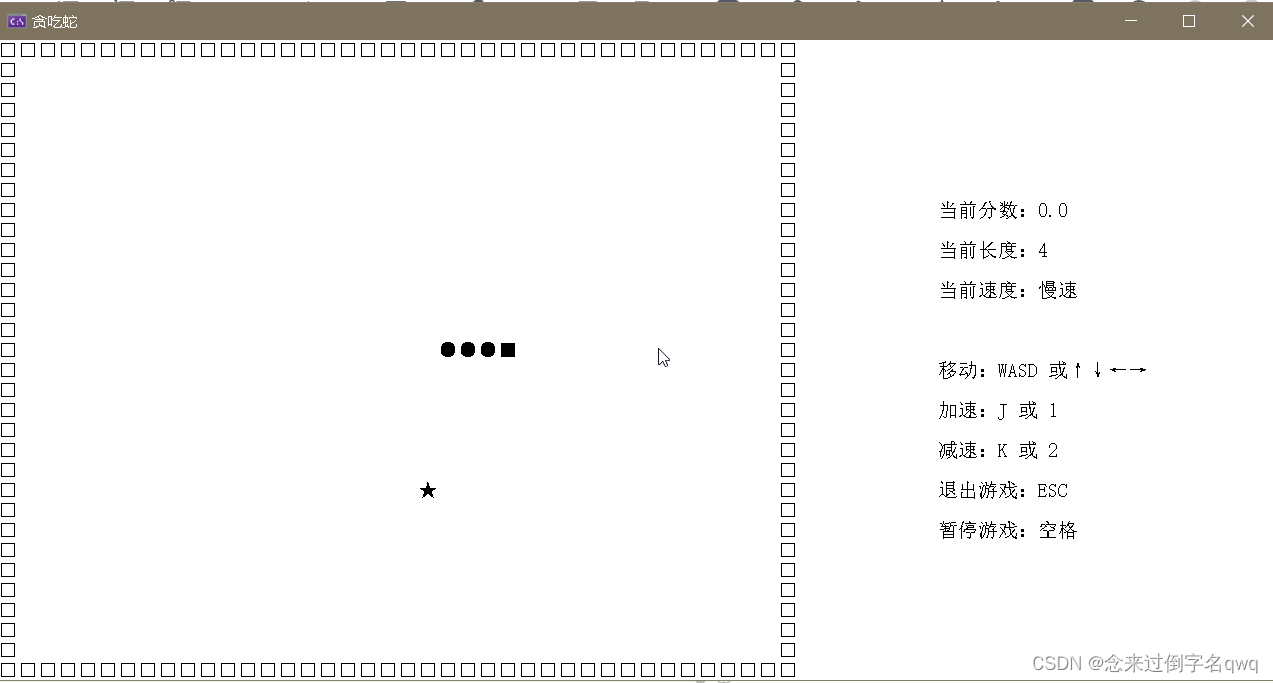
【C语言小游戏】贪吃蛇
文章目录 1.引言2.运行图2.涉及知识3 Windows API3.1 控制台3.2 控制台屏幕坐标3.3 操作句柄3.4 控制台屏幕光标3.5 监视按键 4. 设计说明5. 完整代码 1.引言 使⽤C语⾔在Windows环境的控制台中模拟实现经典⼩游戏贪吃蛇 实现基本的功能: 贪吃蛇地图绘制蛇吃⻝物的…...

GPT-4 Turbo访问权、优先响应、高级数据分析——ChatGPT Plus五大隐藏权益深度拆解,92%用户根本没用全
更多请点击: https://intelliparadigm.com 第一章:ChatGPT Plus订阅值不值得买 ChatGPT Plus 提供每月 $20 的固定订阅服务,主打 GPT-4 模型访问、优先响应队列、文件上传解析(PDF/CSV/TXT 等)及自定义 GPTs 功能。是…...

Windows APK安装器完整指南:无需安卓手机直接安装应用
Windows APK安装器完整指南:无需安卓手机直接安装应用 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想要在Windows电脑上直接安装Android应用吗ÿ…...

Nix与Helm结合:实现声明式Kubernetes部署的确定性构建
1. 项目概述:当 Helm 遇见 Nix,一种声明式的新思路如果你和我一样,长期在 Kubernetes 生态里折腾,肯定对 Helm 又爱又恨。爱的是它用模板和 Values 文件,把一堆零散的 Kubernetes 资源打包成一个可配置、可版本化的“应…...

085、命令行工具开发:argparse模块实战笔记
085、命令行工具开发:argparse模块实战笔记 昨天帮同事调试一个数据清洗脚本,问题出在参数解析上。脚本接收三个输入路径,结果他少传了一个参数,程序直接崩溃报“IndexError”。这种体验太糟糕了——用户不知道哪里错了,也不知道该怎么用。这就是为什么我们需要专业的命令…...

AI提示词工程:用Claude+Cursor构建高效创意工作流
1. 项目概述:当创意遇上AI,一个提示词库如何改变工作流如果你是一位创意工作者——无论是设计师、插画师、文案策划还是视频创作者,最近几个月,你的工作流里可能多了一个新伙伴:Claude。这个由Anthropic推出的AI助手&a…...

Cursor Pro破解终极指南:开源工具cursor-free-vip实现AI编程助手永久免费使用
Cursor Pro破解终极指南:开源工具cursor-free-vip实现AI编程助手永久免费使用 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: …...

CMU开源localPlanner避坑指南:从仿真到实车,ROS小车部署的5个关键步骤
CMU开源localPlanner避坑指南:从仿真到实车,ROS小车部署的5个关键步骤 当学术论文中的算法终于有了开源实现,那种跃跃欲试的心情每个机器人开发者都懂。但真正把代码下载到本地,准备部署到自己的ROS小车上时,才发现从理…...

Cursor Pro破解工具终极指南:5步实现永久免费使用的完整教程
Cursor Pro破解工具终极指南:5步实现永久免费使用的完整教程 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached yo…...

叫不动下属、又不能裁?中层必看!不撕破脸、不内耗,3招拿捏摆烂员工
很多中层都有这样的困境:上面领导催进度,下面员工躺平摆烂,叫不动、推不动;想辞退,却因编制、合同等原因动不了,要么硬刚撕破脸,要么忍气吞声自己扛,内耗严重还没成效。 其实&#…...

2026浏览器插件指纹溯源机制与插件环境安全优化实战指南
一、前言:插件特征成为批量虚拟环境识别的新型突破口在矩阵运营行业精细化风控对抗背景下,UA 修改、IP 切换、基础指纹伪装已经成为行业标配操作,平台逐渐放弃基础参数检测,转向高隐蔽、高区分度、极易被忽略的插件指纹进行设备识…...