STM32 TIM输出比较、PWM波形
单片机学习!
目录
一、输出比较简介
二、PWM简介
三、输出比较通道
3.1通用定时器的输出比较部分电路
3.2高级定时器的输出比较部分电路
四、输出模式控制器
五、PWM基本结构
六、PWM参数计算
总结
前言
文章讲述STM32定时器的输出比较功能,它主要用来输出PWM波形,而PWM波形是驱动电机的必要条件。PWM本质是利用面积等效原理来改变波形的有效值。
一、输出比较简介
- OC(Output Compare)输出比较。
- 输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形。
- 每个高级定时器和通用定时器都拥有4个输出比较通道。
- 高级定时器的前3个通道额外拥有死区生成和互补输出的功能。
库函数中英文缩写:OC(Output Compare)输出比较、IC(Input Capture)输入捕获、CC(Capture/Compare)输入捕获和输出比较的单元。
输出比较模块最主要的功能就是输出一定频率和占空比的PWM波形。CNT和CCR在下图标记的位置:
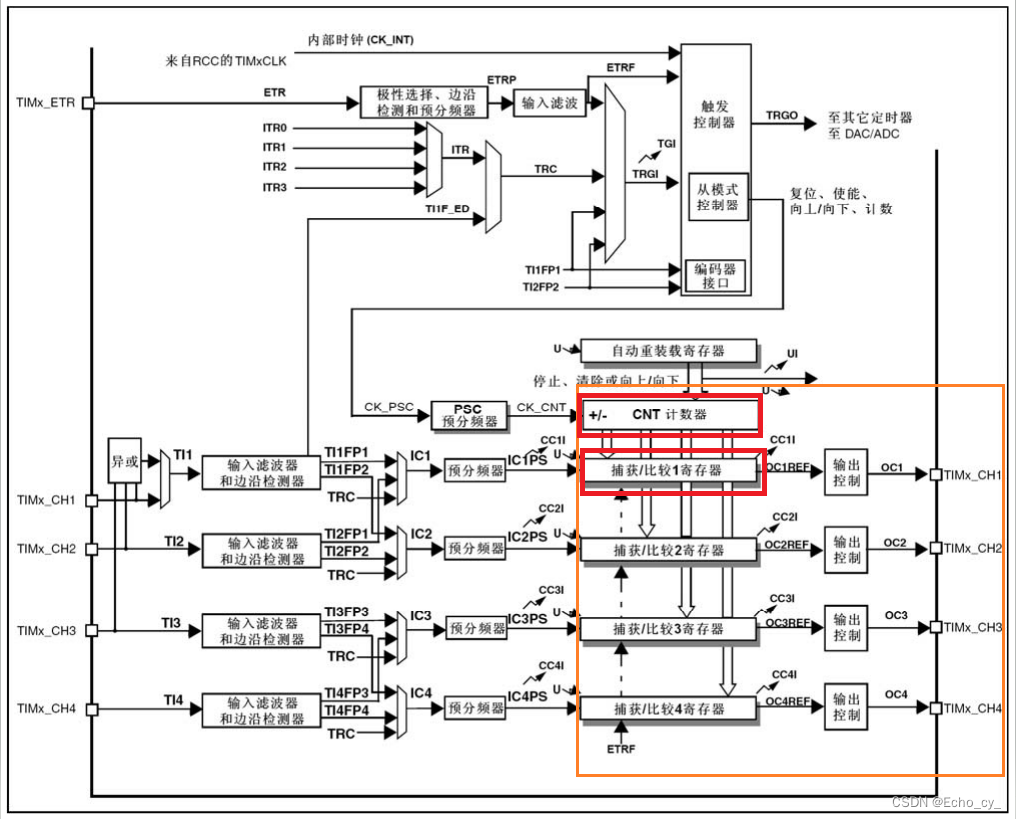
橙色框里就是输出比较电路,红色框里是CNT(时基单元里的计数器),CCR(捕获/比较寄存器)。
捕获/比较寄存器是输入捕获和输出比较共用的。当使用输入捕获时,它就是捕获寄存器;当使用输出比较时,它就是比较寄存器。输出比较时,电路会比较CNT和CCR的值,CNT计数自增,CCR是给定的一个值,当CNT大于CCR、小于CCR或者等于CCR时,这里输出就会对应的置1、置0、置1、置0……这样就可以输出一个电平不断跳变的PWM波形。
二、PWM简介
- PWM(Pulse Width Modulation)脉冲宽度调制。
- 在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域。
- PWM参数: 频率 = 1 / TS 占空比 = TON / TS 分辨率 = 占空比变化步距
PWM波形是一个数字输出信号,是由高低电平组成的一个连续变化的电平信号。
使用PWM波形是用来等效的实现一个模拟信号的输出。如控制LED亮度大小,就是让LED不断点亮、熄灭、点亮、熄灭,当点亮和熄灭的频率足够大时,LED就不会闪烁了,而是呈现出一个中等亮度。控制点亮和熄灭的时间比例就可以使LED呈现不同的亮度级别。电机调速也是同样的原理,用很快的频率给电机通电、断电、通电、断电,那么电机的速度就能维持在一个中等速度。
PWM的应用场景必须要是一个惯性系统。

由上图可以看出,高低电平跳变的数字信号是可以等效为中间紫色虚线所表示的模拟量的,
- 当Ud电平时间长一点,-Ud电平时间短一点的时候,等效的模拟量就偏向于上面;
- 当Ud电平时间短一点,-Ud电平时间长一点的时候,等效的模拟量就偏向于下面;
PWM中几个关键参数:

TS代表一个高低电平变换周期的时间,周期的倒数就是频率,频率 = 1 / TS,PWM的频率越快,那它等效的模拟信号就约平稳,不过同时性能开销就越大,一般来说PWM的频率在几千到几十千赫兹就足够快了。
占空比 = TON / TS,TON是高电平的时间,TS是一个周期的时间。占空比就是高电平时间相对于整个周期时间的比例,一般用百分比来表示。
- 占空比为50%,那就是高低电平时间相等的方波;
- 占空比为20%,那就是高电平占20%,低电平占80%;
- 占空比100%,那就是一直是高电平;
- 占空比0%,那就是一直是低电平。
占空比决定了PWM等效出来的模拟电压的大小。占空比越大,等效的模拟电压就越趋近于高电平;占空比越小,等效的模拟电压就越趋近于低电平;这个等效关系一般来说是线性的,如高电平5V,低电平0V,50%占空比就等效于中间电压,为2.5V;20%占空比就等效于1/5处的电压,就是1V。
分辨率 = 占空比变化步距,比如有的占空比只能是1%、2%、3%等等这样以1%的步距跳变,那它的分辨率就是1%;如果可以1.1%、1.2%、1.3%等等这样以0.1%的步距跳变,那它的分辨率就是0.1%。这个分辨率就是占空比变化的精细程度,分辨率的大小需看实际项目需求。高频率和高分辨率的设计对硬件电路要求也较高。
使用PWM波形,就可以在数字系统等效输出模拟量。可以实现LED控制亮度、电机控速等功能。
三、输出比较通道
3.1通用定时器的输出比较部分电路
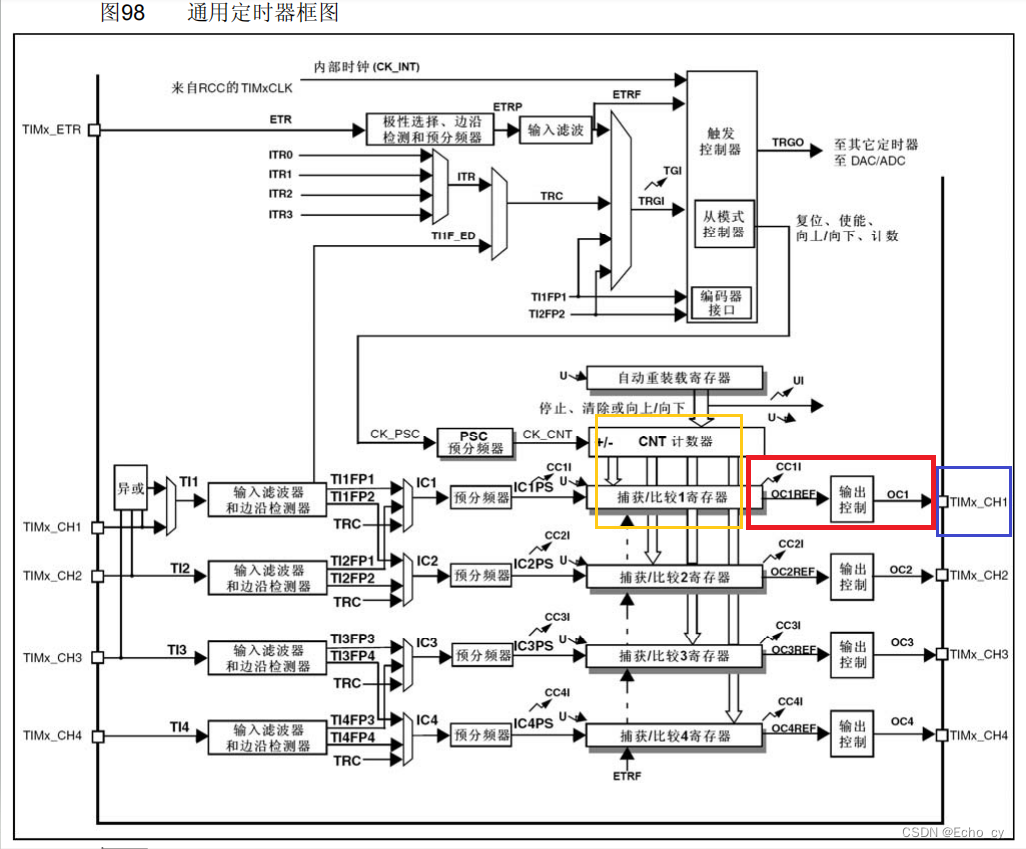
上图通用定时器框图中红色框起来的部分对应的就是下图。由黄色框中CNT和CCR比较的结果传入红色框的输出比较电路,最后通过蓝色框中TIM_CH1输出到GPIO引脚上。下方三个是同样的通道,分别输出到CH2、CH3、CH4。

这部分电路是通用定时器的输出比较部分电路,高级定时器的第四个通道的结构和这部分电路也是基本一样的。
1.由CNT计数器和CCR1第一路的捕获/比较寄存器比较得出CNT>CCR1或CNT=CCR1时,就会给输出模式控制器传一个信号,输出模式控制器就会改变它输出OC1ref的高低电平。ref是reference的缩写,意思是参考信号。(ETRF输入是定时器的一个小功能)
2.ref信号可以前往主模式控制器,可以将ref映射到主模式的TRGO输出。也可以前往极性选择,这个是ref的主要去向,给寄存器CC1P写0,信号就走上方支路,信号电平不翻转,就是信号经过不改变;给寄存器CC1P写1,信号就走下方支路,信号通过一个非门取反。信号经过高低电平反转。极性选择就是选择是否要把高低电平反转。
3.极性选择过后就是输出使能电路,选择要不要输出。最后就是OC1引脚,OC1引脚就是CH1通道的引脚。在引脚定义表可查具体对应哪个GPIO口。
3.2高级定时器的输出比较部分电路
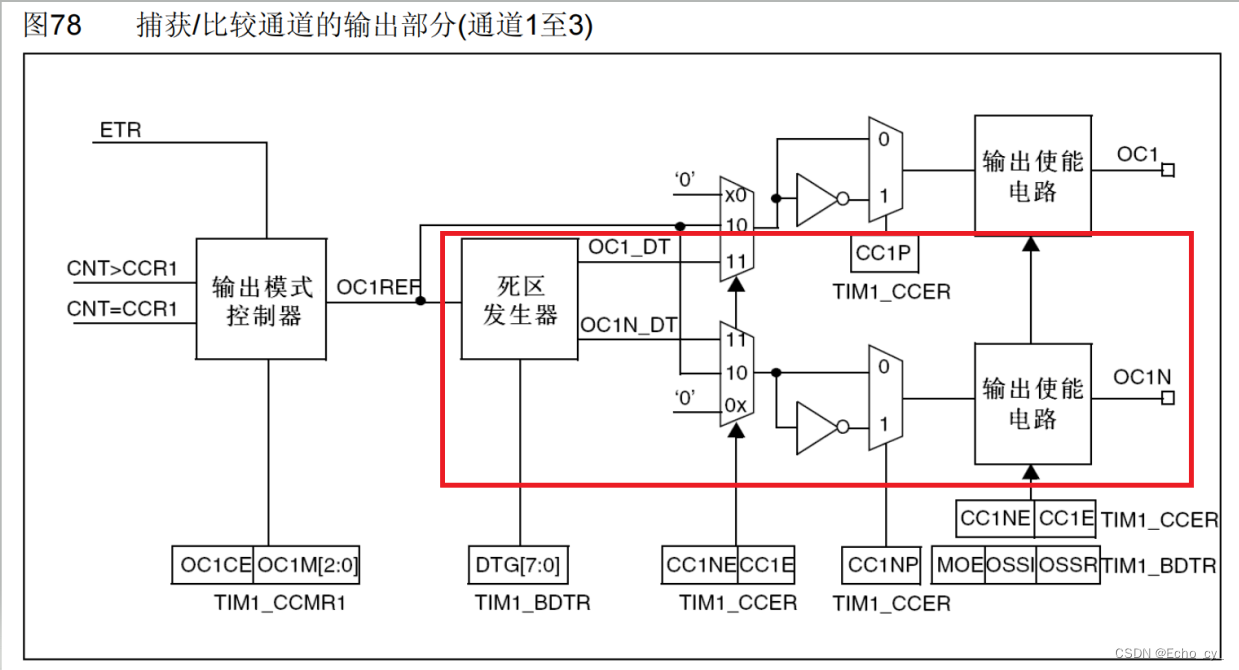
高级定时器的输出比较部分电路比通用定时器的输出比较部分电路多了红色方框框起来的部分。OC1和OC1N就是两个互补的输出端口,一个输出高电平,另一个就输出低电平。死区发生器则用于互补输出切换时延时一小段时间。
四、输出模式控制器
输出模式控制器的输入是CNT和CCR的大小关系,输出的是REF的高低电平,可以选择多种模式控制REF输出。这个模式可以通过CC1M寄存器进行配置。具体操作可参考下表:

1.冻结模式,CNT=CCR时,REF保持为原状态。实际上CNT和CCR就相当于没有用,所以也可以理解为CNT和CCR无效,REF保持为原状态。这个模式比较简单,它根本就不管CNT和CCR谁大谁小,直接REF保持不变,维持上一个状态就行了。冻结模式可用于正在输出PWM波时,突然需要暂停一会儿输出时。冻结模式被切换后,输出就暂停了。并且高低电平也维持为暂停时刻的状态保持不变。
2.有效电平和无效电平一般是高级定时器里面的,与关断、刹车这些功能配合表述的,描述比较严谨,所以叫有效电平和无效电平。为了方便理解,可以直接认为置有效电平就是置高电平、置无效电平就是置低电平。这三个模式都是当CNT与CCR值相等时,执行操作。
- 匹配时置有效电平模式:CNT=CCR时,REF置有效电平,也就是高电平。
- 匹配时置无效电平模式:CNT=CCR时,REF置无效电平,也就是低电平。
- 匹配时电平翻转模式:CNT=CCR时,电平翻转。
以上这三个模式就可以用做波形输出了。
匹配时电平翻转模式和匹配时置无效电平模式都只是一次性置高电平或置低电平后就结束。这两个模式不适合输出连续变化的波形。如果是定时输出一次性的信号,则可以选择这两个模式。
匹配时电平翻转模式可以方便地输出一个频率可调,占空比始终为50%的PWM波形。当设置CCR为0时,CNT每次更新清0时,就会产生一次CNT=CCR的事件,这就会导致输出电平翻转一次。每更新两次,输出为一个周期。并且高电平和低电平的时间是始终相等的,也就是占空比始终为50%。当改变定时器更新频率时,输出波形的频率也会随之改变。输出波形的频率=更新频率/2,因为更新两次输出才为一个周期。这就是匹配时电平翻转模式的用途。
3.强制为无效电平和强制为有效电平模式是CNT与CCR无效,REF强制为无效电平或者强制为有效电平。这两个模式和冻结模式有些相似,如果需要暂停波形输出,并且在暂停期间保持低电平或者高电平。就可以设置这两个强制输出电平模式。
4.PWM模式1和PWM模式2是非常重要的两个模式。它们可以用于输出频率和占空比都可调的PWM波形,是项目中主要使用的模式。
- PWM模式1中计数器为向上计数的情况下,CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平;向下计数的情况下,CNT>CCR时,REF置无效电平,CNT≤CCR时,REF置有效电平。
- PWM模式2中计数器为向上计数的情况下,CNT<CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平;向下计数的情况下,CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平。
PWM模式1和PWM模式2的区别就是输出高低电平反过来了,所以PWM模式2实际上就是PWM模式1输出的取反。改变PWM模式1和PWM模式2,就只是改变了REF电平的极性而已。从上图输出比较通道中可以看到,REF输出之后还有一个极性的配置(图中2部分),所以使用PWM模式1的正极性和PWM模式2的反极性最终的输出是一样的。所以下文介绍其中一种模式:使用PWM模式1的向上计数的模式输出频率和占空比都可调的PWM波形。
五、PWM基本结构
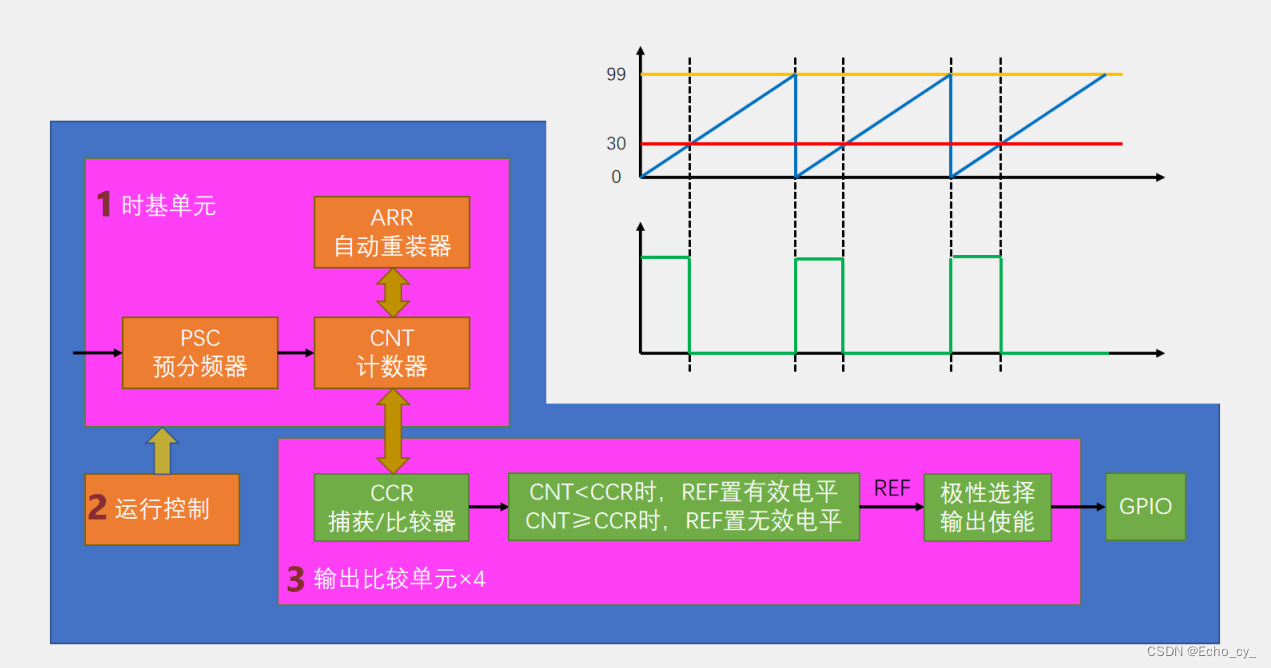
1.时基单元,配置好时基单元,CNT计数器就可以开始不断地自增运行。
2.运行控制。
3.输出比较单元,总共有4路。输出比较单元的最开始是CCR捕获/比较寄存器,CCR可自己设定,CNT不断自增运行,同时CNT和CCR在不断进行比较。CCR之后输出模式控制器以PWM模式1中CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平为执行逻辑。
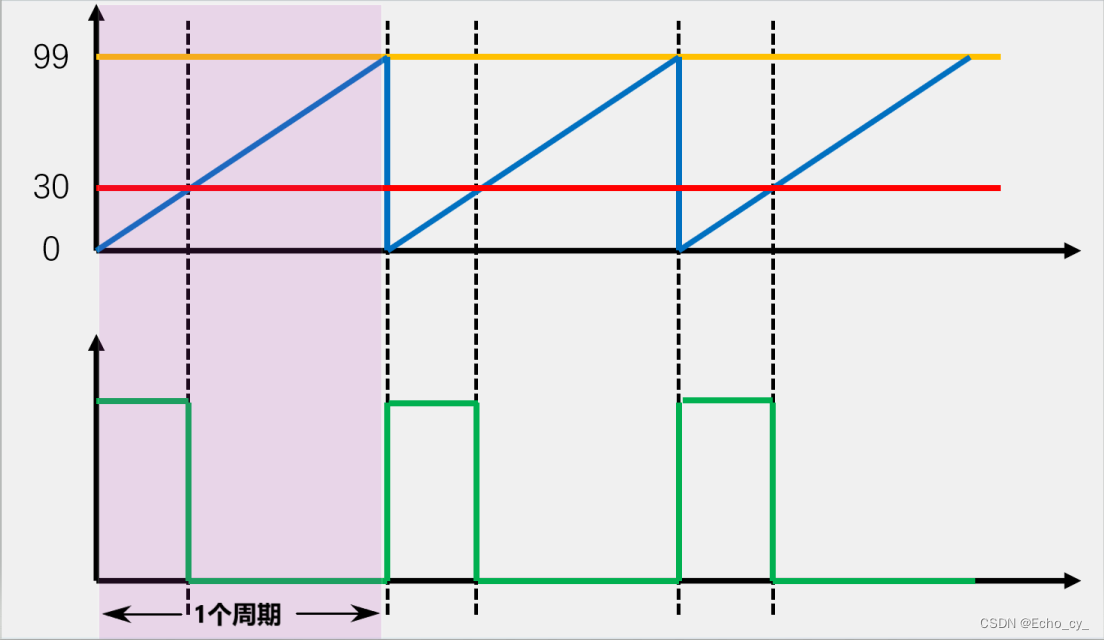
图中右上角的第一个折线图中,蓝色线是CNT的值,黄色线是ARR的值。蓝线CNT从0开始自增,一直增到ARR也就是99之后清0,继续自增。在这个过程中,设置的红色线是CCR,图中CCR设置为30,执行图中PWM模式1的向上计数的逻辑。就得到右上角第二个方波图中绿色线表示的输出波形。
右上角两个图对照来看,最开始CNT<CCR时,置高电平;当CNT≥CCR时,变为低电平;当CNT溢出清0后,CNT又小于CCR,置高电平;之后CNT≥CCR时,置低电平。这样一直持续下去,REF的电平就会不断变化,并且它的占空比是受CCR值的调控的。如果CCR的值设置高一些,输出的占空比就变大;CCR的值设置的低一些,输出的占空比就变小。这就是PWM模式的工作流程。这里的REF就是一个频率可调,占空比也可调的PWM波形。
REF最终在经过极性选择,输出使能,最终通向GPIO口。最终完成PWM波形的输出。
六、PWM参数计算
- PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
- PWM占空比: Duty = CCR / (ARR + 1)
- PWM分辨率: Reso = 1 / (ARR + 1)
PWM频率:PWM的一个周期始终对应着计数器CNT的一个溢出更新周期,所以PWM的频率就等于计数器CNT的更新频率,PWM频率的计算公式就是计数器的更新频率公式。
PWM占空比:一个周期中CNT是从0一直加到ARR,图中ARR是99,那CNT总共就是计了100个数。PWM波高电平时,CNT是从0一直加到CCR,图中CCR是30,在等于30的瞬间,PWM波形就已经跳变为低电平了。CNT从0到29是高电平,总共是计30个数的时间。所以占空比就是30/100=30%,对应公式 Duty = CCR / (ARR + 1)。
PWM分辨率:分辨率也就是占空比变化的步距。从图中可以看出,CCR的值因该设置在0到ARR+1这个范围里,CCR=ARR+1时,占空比就正好是100%;若 CCR>(ARR+1) 时,占空比始终是100%,这样设置没有意义。所以CCR的变化范围取决于ARR的值,ARR越大,CCR的范围就越大,对应的分辨率就越大,总结公式为 Reso = 1 / (ARR + 1),公式里定义的分辨率是占空比最小的变化步距,所以这个值越小越好;也可以定义CCR的范围为分辨率,这个值越大越好。这两种定义都是对应占空比变化的越细腻越好。
总结
以上就是今天要讲的内容,本文仅仅简单介绍了STM32输出比较和PWM的一些内容。
相关文章:
STM32 TIM输出比较、PWM波形
单片机学习! 目录 一、输出比较简介 二、PWM简介 三、输出比较通道 3.1通用定时器的输出比较部分电路 3.2高级定时器的输出比较部分电路 四、输出模式控制器 五、PWM基本结构 六、PWM参数计算 总结 前言 文章讲述STM32定时器的输出比较功能,它主…...

React16源码: React中的updateClassComponent的源码实现
ClassComponent 的更新 1 ) 概述 在 react 中 class component,是一个非常重要的角色它承担了 react 中 更新整个应用的API setStateforceUpdate 在react当中,只有更新了state之后,整个应用才会重新进行渲染在 class component 中…...

Mybatis 动态SQL(set)
我们先用XML的方式实现 : 把 id 为 13 的那一行的 username 改为 ip 创建一个接口 UserInfo2Mapper ,然后在接口中声明该方法 package com.example.mybatisdemo.mapper; import com.example.mybatisdemo.model.UserInfo; import org.apache.ibatis.annotations.*; import jav…...
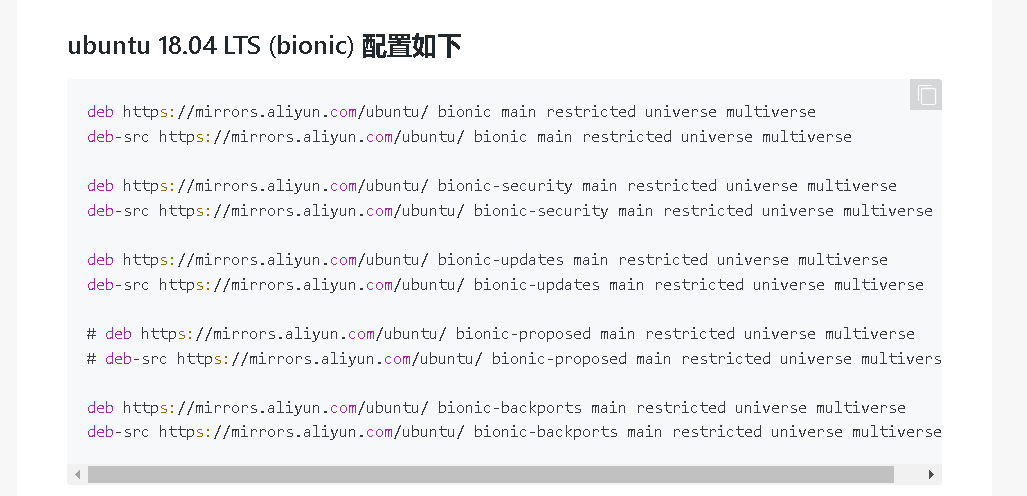
Ubuntu18.04在线镜像仓库配置
在线镜像仓库 1、查操作系统版本 rootubuntu:~# lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 18.04.5 LTS Release: 18.04 Codename: bionic 2、原文件备份 sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak 3、查…...

多数据源配置H2 Mysql
H2->Mysql数据迁移 需求背景环境说明实现过程配置调整原配置修改配置 代码调整新增DatasourceConfig配置类使用secondaryJdbcTemplate 需求背景 最近有一需求,原本项目中由于某些原因使用嵌入式数据库H2,鉴于嵌入式数据库可靠性以及不方便管理等因素…...
)
【ASP.NET Core 基础知识】--路由和请求处理--路由概念(一)
在Web应用中,路由是一个至关重要的概念,它负责将用户的请求映射到相应的处理程序,以确保正确的页面或资源被呈现给用户。通过将用户请求与适当的处理程序关联起来,使得应用能够以有序和可维护的方式响应用户的操作。 一、ASP.NET…...

【Unity】RayMarching体积云理论学习
RayMarching 体积云 RayMarching 是一种处理体积物体的方法 RayMarching 体积云的制作是基于屏幕后处理 屏幕空间重建世界坐标 目的是把屏幕坐标的每一个像素点转化成Unity世界坐标,可以得到射线的方向 如何在需要渲染的物体或者场景中使用RayMarchingÿ…...

物联网与智慧城市的无界未来:如何打破传统束缚,开启智能生活新篇章
目录 一、物联网:连接万物的技术革命 1、物联网的发展历程 2、物联网的核心技术 二、智慧城市:未来城市的蓝图与挑战 1、智慧城市的蓝图 2、智慧城市建设面临的挑战 3、应对挑战的措施 三、物联网与智慧城市的融合:打破传统束缚&…...

nodejs下载安装
一、node下载安装 官网下载 官网 根据自己电脑系统选择合适的版本进行下载,我这里选择window 64 位 下载完点击安装 打开cmd查看安装 此处说明下:新版的Node.js已自带npm,安装Node.js时会一起安装,npm的作用就是对Node.js…...

从零学Java - Lambda表达式
Lambda 表达式 文章目录 Lambda 表达式什么是 Lambda 表达式?怎么使用?1 基本语法:2 箭头符号:3 代码演示:4 注意事项 函数式接口1 什么是函数式接口2 常见函数式接口 方法引用(了解)1 什么是方法引用 什么是 Lambda 表达式? Lambda表达式:特殊的匿名内部类&…...
RV1103与FPGA通过MIPI CSI-2实现视频传输,实现网络推流
RV1103与FPGA通过MIPI CSI-2实现视频传输,实现网络推流。 一:图像格式 支持图像格式如下: [0]: NV16 (Y/CbCr 4:2:2) Size: Stepwise 64x64 - 2304x1296 with step 8/8 [1]: NV61 (Y/CrCb 4:2:2) Size: Stepwise 64x64 - 2304x1296 with …...
力扣62. 不同路径
动态规划 思路: 定义 dp[r][c] 为到达坐标 (r, c) 的路径数: 它只能有同一行左边相邻方格向右到达或者同一列上方相邻方格向下到达;状态转移方程: dp[r][c] dp[r][c - 1] dp[r - 1][c]初始状态 dp[0][0] 1第一行的路径数是 1第…...

使用Element-Plus 加载style
vue-chrome-extension 简介 chrome扩展开发插件基于vue3、ts、Element Plus、Webpack5、axios、less开发 支持content快速调用chrome对象及axios 详看 pages/content/app.vue 开箱即用chrome插件 特性 基础框架:使用 Vue3/Element PlusTypeScript: 应用程序级 J…...
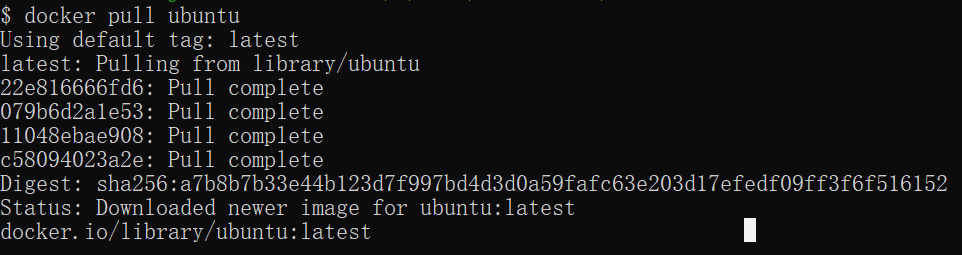
Kafka常见指令及监控程序介绍
kafka在流数据、IO削峰上非常有用,以下对于这款程序,做一些常见指令介绍。 下文使用–bootstrap-server 10.0.0.102:9092,10.0.0.103:9092,10.0.0.104:9092 需自行填写各自对应的集群IP和kafka的端口。 该写法 等同 –bootstrap-server localhost:9092 …...
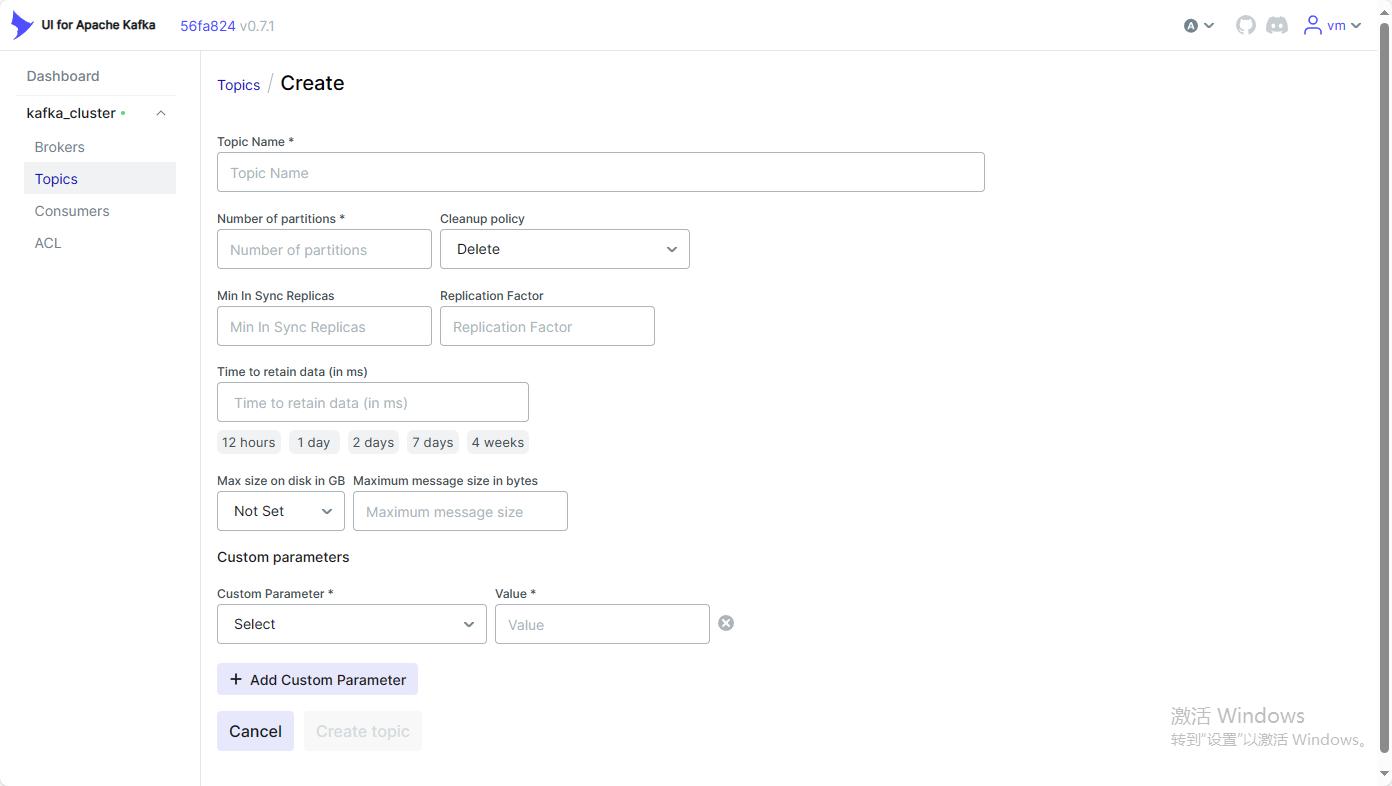
Docker 仓库管理
Docker 仓库管理 仓库(Repository)是集中存放镜像的地方。以下介绍一下 Docker Hub。当然不止 docker hub,只是远程的服务商不一样,操作都是一样的。 Docker Hub 目前 Docker 官方维护了一个公共仓库 Docker Hub。 大部分需求…...

LeetCode-410.分割数组的最大值
原题链接:https://leetcode.cn/problems/split-array-largest-sum/description 题面 给定一个非负整数数组 nums 和一个整数 k ,你需要将这个数组分成 k 个非空的连续子数组。设计一个算法使得这 k 个子数组各自和的最大值最小。 思路 数组定义ÿ…...

Redis和RediSearch的安装及使用
1. 安装要求 ReadiSearch要求Redis的版本在6.0以上RediSearch 要求使用 GNU Make 4.0 或更高版本 2. Redis的安装 查看redis的版本: redis-server --version或者,如果你已经启动了Redis服务器,你也可以使用redis-cli工具来获取版本信息&a…...

面向对象进阶--接口2
JDK8开始接口中新增的方法 接口中可以定义有方法体的方法(默认、静态)。 使用默认方法的作用:解决接口升级的问题。 接口中默认方法的定义格式: public default返回值类型 方法名(参数列表){} 接口中默…...

提升认知,推荐15个面向开发者的中文播客
前言 对于科技从业者而言,无论是自学成才的程序员,还是行业资深人士,终身学习是很有必要的,尤其是在这样一个技术快速迭代更新的时代。 作为一个摆脱了时间和空间限制的资讯分享平台,播客(Podcast&#x…...

数据分析-Pandas如何整合多张数据表
数据分析-Pandas如何整合多张数据表 数据表,时间序列数据在数据分析建模中很常见,例如天气预报,空气状态监测,股票交易等金融场景。数据分析过程中表格重整,重新调整,重塑数据表是很重要的技巧,…...

Magisk:重新定义Android系统定制边界的技术框架
Magisk:重新定义Android系统定制边界的技术框架 【免费下载链接】Magisk The Magic Mask for Android 项目地址: https://gitcode.com/GitHub_Trending/ma/Magisk Magisk作为Android系统定制领域的革命性框架,以其独特的"无系统"&#…...

避坑指南:为什么你的Realsense D435i视频流用VLC/EasyPlayer打不开?RTSP回传思翼MK15E的正确姿势
深度解析:Realsense D435i视频流RTSP传输的兼容性陷阱与实战解决方案 当你在无人机项目中尝试通过RTSP协议传输Realsense D435i的实时视频流时,是否遇到过VLC或EasyPlayer无法正常播放的困扰?这种看似简单的视频流传输背后,隐藏着…...

【BUUCTF】【WEB】ReadlezPHP
考点:打开题目,发现页面有点阴森:右键没有任何反应,那就右上角三个点:更多工具->开发者工具OK没有任何线索,那就用bp看看。拉倒最下面,发现右下角一个文件./time.php?source这可能是一个线索…...

直播字幕难题终结者:OBS实时字幕插件完全攻略
直播字幕难题终结者:OBS实时字幕插件完全攻略 【免费下载链接】OBS-captions-plugin Closed Captioning OBS plugin using Google Speech Recognition 项目地址: https://gitcode.com/gh_mirrors/ob/OBS-captions-plugin 你是否曾为直播观众听不清你的声音而…...

docker-compose修改配置后实现开机自启
如图,我四个服务,都写了个简单的restart.sh的脚本。 要让这四个服务开机自动启动,最稳妥的方法是用 systemd 服务管理: 用 systemd 管理(稳定可控) 1. 创建统一的启动脚本 # 新建一个脚本目录 mkdir -p …...
)
告别IDE切换!在VS2022里用上C++ Builder的智能提示(保姆级路径配置)
在VS2022中无缝集成C Builder智能提示的终极指南 对于长期使用C Builder进行Windows桌面开发的工程师来说,Visual Studio 2022的现代化界面和强大调试功能一直是个诱人的存在。但频繁在两个IDE之间切换不仅打断工作流,还会显著降低开发效率。本文将揭示如…...

NotebookLM脑机接口部署避坑指南:TensorRT加速失效、电极位移漂移补偿、低信噪比场景下的9种fallback策略
更多请点击: https://codechina.net 第一章:NotebookLM脑机接口研究 NotebookLM 是 Google 推出的基于用户自有文档进行深度理解与推理的 AI 助手,虽其官方定位并非直接面向脑机接口(BCI)领域,但其底层架构…...

本地Cookie管理终极指南:Get cookies.txt LOCALLY完全解析
本地Cookie管理终极指南:Get cookies.txt LOCALLY完全解析 【免费下载链接】Get-cookies.txt-LOCALLY Get cookies.txt, NEVER send information outside. 项目地址: https://gitcode.com/gh_mirrors/ge/Get-cookies.txt-LOCALLY 在当今数字时代,…...

从零构建智能体工作流引擎:多Agent系统架构与工程实践
1. 项目概述:从零构建一个智能体工作流引擎最近在GitHub上看到一个挺有意思的项目,叫strands-agents/agent-builder。光看名字,你可能会觉得这又是一个“AI智能体”的玩具项目,但实际深入进去,你会发现它试图解决的是一…...

微信读书笔记助手:3分钟快速上手的终极笔记管理指南
微信读书笔记助手:3分钟快速上手的终极笔记管理指南 【免费下载链接】wereader 一个浏览器扩展:主要用于微信读书做笔记,对常使用 Markdown 做笔记的读者比较有帮助。 项目地址: https://gitcode.com/gh_mirrors/wer/wereader 微信读书…...