新定义51单片机(RD8G37)实现测距测速仪
本文描述用新定义51单片机(RD8G37)+超声波一体测距传感器实现简单的测距测速仪。

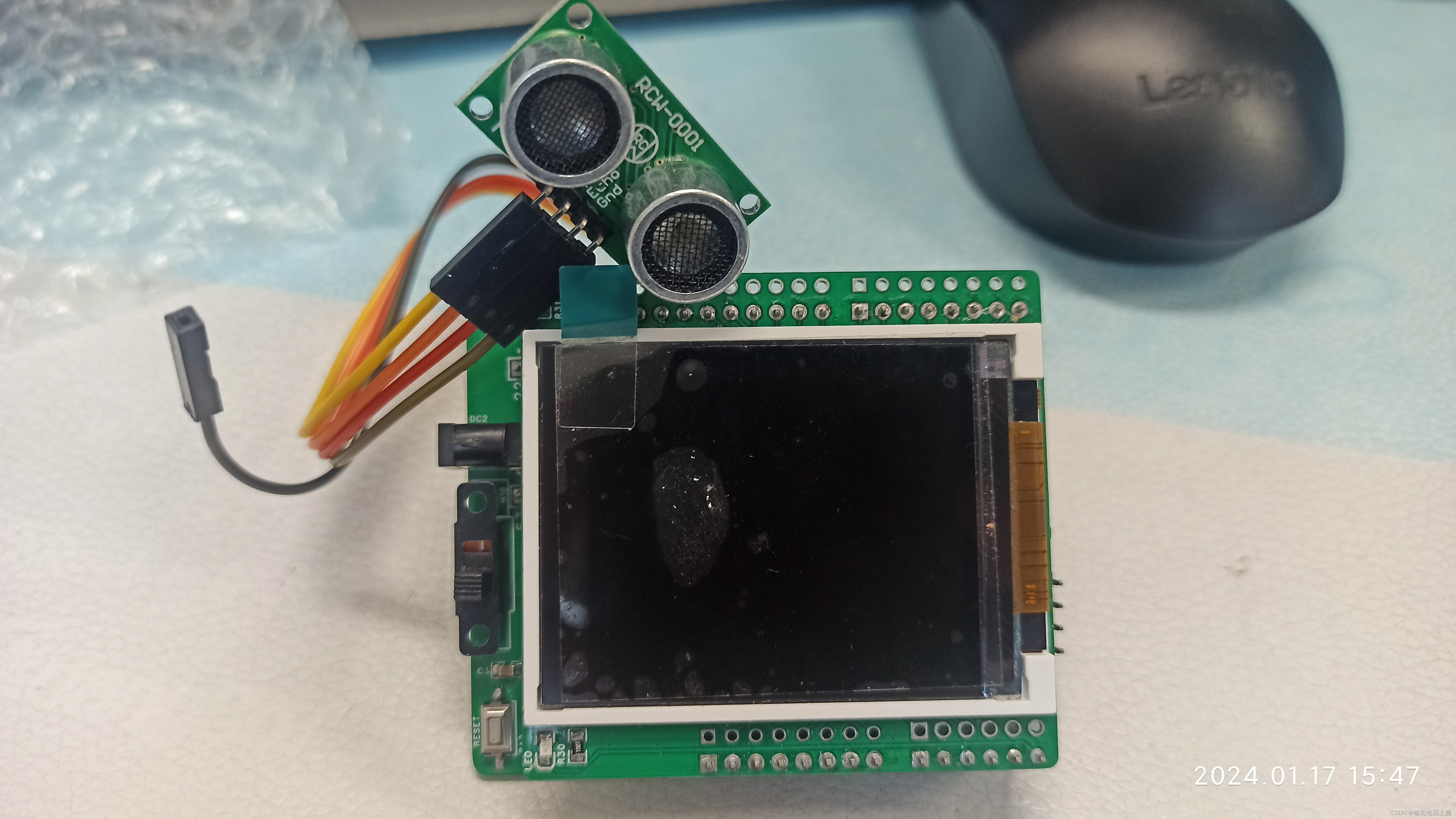
测距仪演示效果
新定义RD8G37Q48RJ开发板

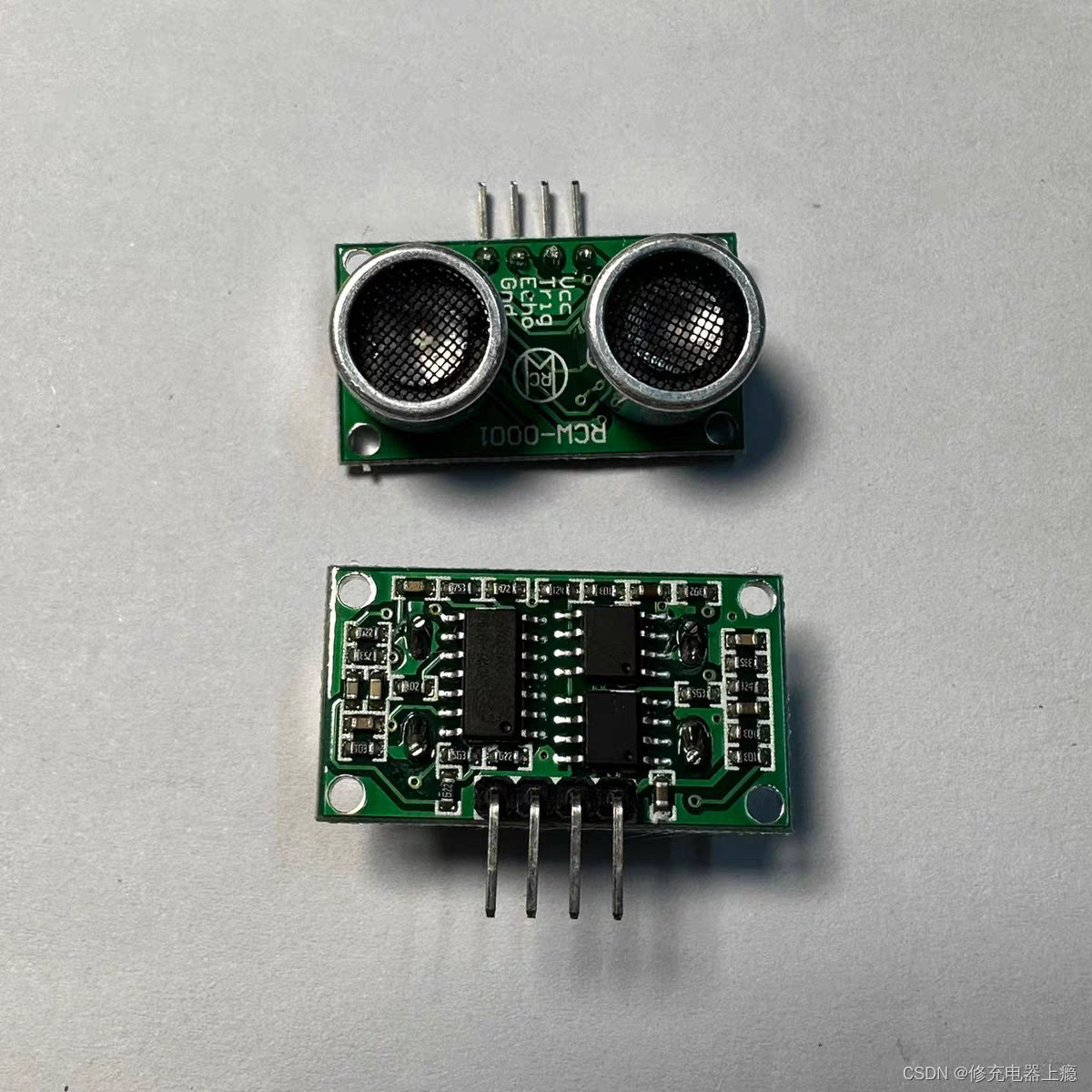
超声波测距模块:
8位并口屏
1、main.c
unsigned short timeConsuming=0;
unsigned int oldDistance;void rectClearScreen(void);void updateDisplay(void)
{unsigned int d[2];float v,dis;char buf[8]={0};memset(buf, '0', 8);Measure_Distance(d);dis=((float)d[0])/1000;sprintf(buf,"%0.f2d",dis); // 获取当前秒 buf[4]='\0'; if(d[0]<500){//rectClearScreen();GUI_WriteASCII_BIG(6,60,buf,VGA_YELLOW,VGA_RED);}else GUI_WriteASCII_BIG(6,60,buf,VGA_WHITE,VGA_BLACK);if(oldDistance>d[0])v=((float)(oldDistance-d[0]))/d[1];else v=(d[0]-oldDistance)/d[1];sprintf(buf,"%0.2f",v); // 获取当前秒 buf[4]='\0';GUI_WriteASCII(150,60,buf,VGA_Mint,VGA_BLACK);oldDistance=d[0];}void rectClearScreen(void)
{uint8_t i;setColor(VGA_RED);for(i=0;i<30;i+=3){drawRect(i+6,i*176/220+60,214-i,110-i*176/220);}
}
void draw_interface(void)
{setColor(VGA_BLACK);clrScr(VGA_BLACK);setColor(VGA_Orange_Red);fillRect(5,5,105,83);setColor(VGA_Golden);fillRect(115,5,215,83);setColor(VGA_Medium_Blue);fillRect(5,93,105,171);setColor(VGA_Mint);fillRect(115,93,215,171);GUI_Write32CnChar(10,10,"测距测速仪",VGA_Orange_Red,VGA_BLACK);GUI_Write32CnChar(118,113,"新定义",VGA_WHITE,VGA_Dark_Green);GUI_WriteASCII(20,145,"RD8G37Q48RJ",VGA_Dark_Mineral_Blue,VGA_BLACK);setColor(VGA_BLACK);fillRect(5,53,215,111);GUI_Write32CnChar(102,72,"米",VGA_WHITE,VGA_BLACK);GUI_WriteASCII(150,60,"1.1",VGA_Mint,VGA_BLACK);GUI_WriteASCII(165,82,"m/s",VGA_WHITE,VGA_BLACK);setColor(0XC618);drawRoundRect(0,0,219,175);
}
void main(void)
{ /*<Generated by EasyCodeCube begin>*//*<UserCodeStart>*//*<SinOne-Tag><36>*/IcResourceInit();InitLCD();setColor(VGA_BLACK);draw_interface();/*<UserCodeEnd>*//*<SinOne-Tag><36>*//*<UserCodeStart>*//*<SinOne-Tag><4>*//*****MainLoop*****/while(1){/*<UserCodeStart>*//*<SinOne-Tag><14>*//***User program***/updateDisplay();Delay(50000);/*<UserCodeEnd>*//*<SinOne-Tag><14>*//*<Begin-Inserted by EasyCodeCube for Condition>*/}/*<UserCodeEnd>*//*<SinOne-Tag><4>*//*<Generated by EasyCodeCube end>*/
}
2、传感器驱动
HC_SR04.c
#include "SC_Init.h"
#include "HC_SR04.h"extern unsigned int time;void Delay_us(unsigned short time)
{do{_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}while(--time);}void HC_GPIO_Init(void)
{ResetTrig(); //Trig拉低,为输出脉冲触发信号做准备
}void Measure_Distance(unsigned int* distance) //测距
{//unsigned int distance[2]=0;SetTrig(); //10us的脉冲触发信号Delay_us(10);ResetTrig();while(HC_ECHO==0); //等待Echo输出高电平time=0; //开始记录回波信号脉宽while(HC_ECHO==1); //等待Echo输出低电平 distance[0]=time*1.7;//根据声速和时间计算距离,即distance=time*340/2/100distance[1]=time;/*关于分辨力(mm):定时器每次对time加1是10us,10us=0.01ms,340m/s=340mm/ms计算距离时,最小分辨力为:0.01(ms) * 340(mm/ms) / 2 = 1.7(mm)小于模块标准精度3mm,故测距结果十分精准*/return ; //返回距离,单位mm
}HC_SR04.h
#ifndef _HC_SR04_H_
#define _HC_SR04_H_#define HC_TRIG P21
#define HC_ECHO P20
#define SetTrig() HC_TRIG=1
#define ResetTrig() HC_TRIG=0
//#define ReadEcho() GPIO_ReadPin(CW_GPIOB,GPIO_PIN_9)void HC_GPIO_Init(void);
void Measure_Distance(unsigned int* distance);#endif
3、初始化和中断
SC_Init.c,
初始化8位并口屏GPIO,TIMER0。
TIMER0设置为10us中断一次,做为距离传感器的测量时间最小单位。
void SC_Init(void)
{//Forbid editing areas before the following label !!!SC_GPIO_Init();SC_OPTION_Init();SC_TIM0_Init();/*write initial function here*/ EA = 1;
}/*****************************************************
*函数名称: SC_GPIO_Init
*函数功能: GPIO初始化函数
*入口参数:void
*出口参数:void
*****************************************************/
void SC_GPIO_Init(void)
{//Forbid editing areas before the following label !!!GPIO_Init(GPIO3, GPIO_PIN_6,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_5,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_4,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_3,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_2,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_1,GPIO_MODE_OUT_PP);GPIO_Init(GPIO3, GPIO_PIN_0,GPIO_MODE_OUT_PP);GPIO_Init(GPIO1, GPIO_PIN_0,GPIO_MODE_OUT_PP);GPIO_Init(GPIO2, GPIO_PIN_0,GPIO_MODE_IN_HI);GPIO_Init(GPIO2, GPIO_PIN_1,GPIO_MODE_OUT_PP);GPIO_Init(GPIO0, GPIO_PIN_4,GPIO_MODE_OUT_PP);GPIO_Init(GPIO0, GPIO_PIN_5,GPIO_MODE_OUT_PP);GPIO_Init(GPIO0, GPIO_PIN_6,GPIO_MODE_OUT_PP);GPIO_Init(GPIO5, GPIO_PIN_1,GPIO_MODE_OUT_PP);GPIO_Init(GPIO5, GPIO_PIN_5,GPIO_MODE_OUT_PP);GPIO_Init(GPIO4, GPIO_PIN_7,GPIO_MODE_OUT_PP);/*GPIO_Init write here*/
}/*****************************************************
*函数名称: SC_TIM0_Init
*函数功能: TIMER0初始化函数
*入口参数:void
*出口参数:void
*****************************************************/
void SC_TIM0_Init(void)
{//Forbid editing areas before the following label !!!TIM0_TimeBaseInit(TIM0_PRESSEL_FSYS_D12,TIM0_MODE_TIMER);TIM0_WorkModeConfig(TIM0_WORK_MODE2,229, 0);TIM0_ITConfig(ENABLE,LOW);TIM0_Cmd(ENABLE);/*TIM0_Init write here*/
}
SC_it.c
TIMER0中断,每次中断计数加1。
void Timer0Interrupt() interrupt 1
{/*TIM0_it write here begin*///Forbid editing areas between the labels !!!/*TIM0_it write here*//*<Generated by EasyCodeCube begin>*//*<UserCodeStart>*//*<SinOne-Tag><55>*///Timer0Interrupt{/*<UserCodeStart>*//*<SinOne-Tag><15>*//***User program***/time++;/*<UserCodeEnd>*//*<SinOne-Tag><15>*//*<Begin-Inserted by EasyCodeCube for Condition>*/}/*<UserCodeEnd>*//*<SinOne-Tag><55>*//*<Generated by EasyCodeCube end>*//*Timer0Interrupt Flag Clear begin*///Forbid editing areas between the labels !!!/*Timer0Interrupt Flag Clear end*/
}总结
1、程序中用了TIMER0,主要是TIMER0可以做到us级,可以使测距更准确。
2、HC_SR04传感器的算法是通用的。
3、RD8G37Q48是QFN封装,PCB封装引脚延长到3mm,可以用烙铁焊接。
4、HC_SR04传感器不能测太远距离,室内3米以内应该没问题。
5、所用屏幕为ST7775,220*176分辨率,8位并口屏。
6、工程的建立用的是EasyCodeCube.exe,主要实现了gpio和timer初始化。程序编写和下载用的是keil。
相关文章:
新定义51单片机(RD8G37)实现测距测速仪
本文描述用新定义51单片机(RD8G37)超声波一体测距传感器实现简单的测距测速仪。 测距仪演示效果 新定义RD8G37Q48RJ开发板 超声波测距模块: 8位并口屏 1、main.c unsigned short timeConsuming0; unsigned int oldDistance;void rectClearS…...
Unity中URP下获取每一个额外灯数据
文章目录 前言一、我们先来看一下 SimpleLit 中的调用二、获取额外灯索引1、非移动平台2、非GLES平台3、大多数平台 三、获取额外灯数据 前言 在上一篇文章中,我们知道了URP下是怎么获取额外灯数量的。 Unity中URP下获取额外灯数量 在这篇文章中,我们…...

差分进化算法求解基于移动边缘计算 (MEC) 的无线区块链网络的联合挖矿决策和资源分配(提供MATLAB代码)
一、优化模型介绍 在所研究的区块链网络中,优化的变量为:挖矿决策(即 m)和资源分配(即 p 和 f),目标函数是使所有矿工的总利润最大化。问题可以表述为: max m , p , f F miner …...

Tomcat Notes: Web Security, HTTPS In Tomcat
This is a personal study notes of Apache Tomcat. Below are main reference material. - YouTube Apache Tomcat Full Tutorial,owed by Alpha Brains Courses. https://www.youtube.com/watch?vrElJIPRw5iM&t801s 1、Overview2、Two Levels Of Web Securi…...

智能小程序登陆能力开发文档及示例代码
小程序登录 涂鸦官方提供了登录能力,开发者可以通过相关 API 获取 App 的用户身份标识,快速的建立小程序内的用户体系。 登录流程 说明 需要调用 ty.login() 获取 临时登录凭证 code,并将 code 传到开发者服务器开发者服务器调用涂鸦云开发…...
常见の算法
前言本文主要使用Java 什么,是快乐星球#¥%……什么是算法? 算法是一组完成任务的指令。任何代码片段都可视为算法,但我们主要介绍常见算法 一、引入——二分查找 二分查找是一种算法,其输入是一个有序的元素列表。如…...

openssl3.2/test/certs - 041 - 1024-bit leaf key
文章目录 openssl3.2/test/certs - 041 - 1024-bit leaf key概述笔记END openssl3.2/test/certs - 041 - 1024-bit leaf key 概述 openssl3.2 - 官方demo学习 - test - certs 笔记 /*! * \file D:\my_dev\my_local_git_prj\study\openSSL\test_certs\041\my_openssl_linux_…...

「创新引领未来」科东软件荣获第十二届中国创新创业大赛(广东·广州赛区)优胜奖
近日,广州市科学技术局公布第十二届中国创新创业大赛(广东广州赛区)暨2023年广州科技创新创业大赛常规赛拟获奖企业名单。科东软件凭借国产化技术创新优势、强大的应用场景落地能力和丰富的行业解决方案,荣获第十二届中国创新创业…...
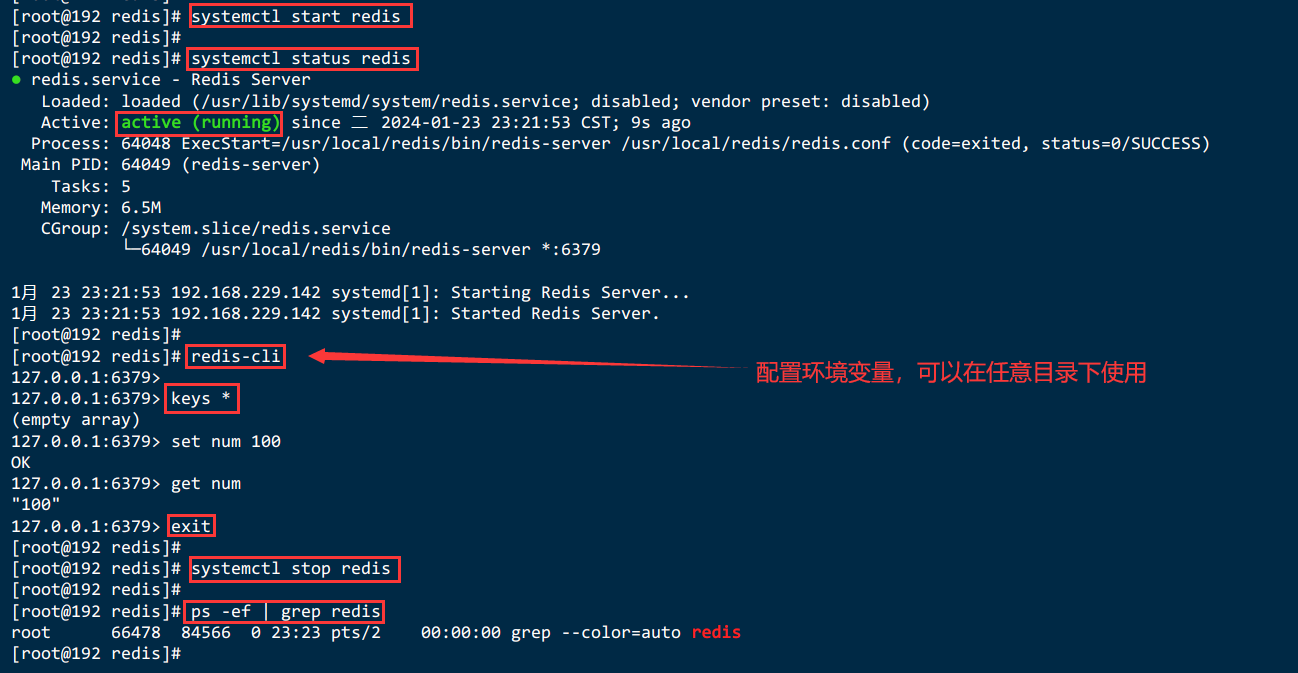
Linux下安装 Redis7
Linux下安装 Redis7 三、Linux下安装 Redis7【redis-7.2.4.tar.gz】3.1.下载redis的安装包3.1.1.手动下载Redis压缩包并上传【redis-7.2.4.tar.gz】3.1.2.wget工具下载redis-7.2.4.tar.gz 3.2.将安装包进行解压缩3.3.进入redis的安装包3.4.检查是否有gcc 环境3.5.编译和安装并指…...

spire.doc合并word文档
文章目录 spire.doc合并word文档1. 引入maven依赖2. 需要合并的word3. 合并文档代码4. 合并结果 spire.doc合并word文档 1. 引入maven依赖 <repositories><repository><id>com.e-iceblue</id><name>e-iceblue</name><url>https://r…...
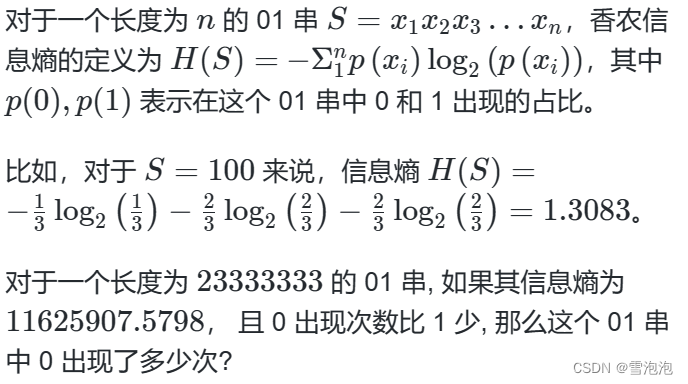
蓝桥杯官网填空题(01串的熵)
问题描述 答案提交 这是一道结果填空的题, 你只需要算出结果后提交即可。本题的结果为一 个整数, 在提交答案时只填写这个整数, 填写多余的内容将无法得分。 import java.util.*;public class Main {public static void main(String[] args) {for(double zero1;zero<2333…...
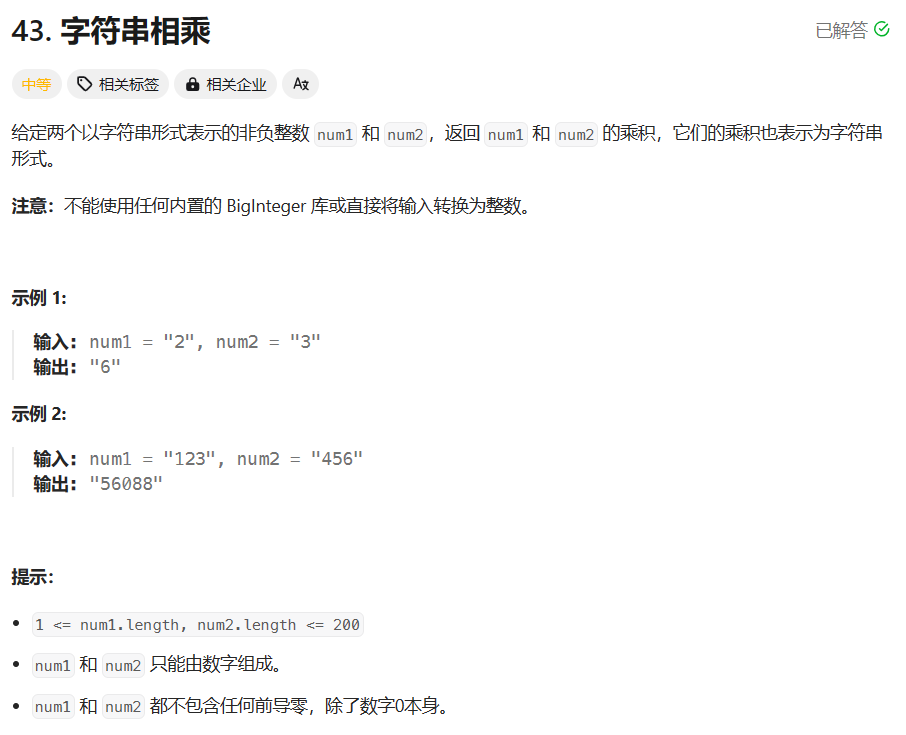
【CodeTop】TOP 100 刷题 51-60
文章目录 51. 缺失的第一个正数题目描述代码与解题思路 52. 训练计划 II题目描述代码与解题思路 53. 子集题目描述代码与解题思路 54. 最小覆盖子串题目描述代码与解题思路 55. 从前序与中序遍历序列构造二叉树题目描述代码与解题思路 56. 零钱兑换题目描述代码与解题思路 57. …...

k8s的图形化工具---rancher
rancher是一个开源的企业级多集群的k8s管理平台。 rancher和k8s的区别:都是为了容器的调度和编排系统。但是rancher不仅可以调度还可以管理整个k8s集群。 rancher自带监控(普罗米修斯) 实验部署 master01 20.0.0.32 node01 20.0.0.34 node02 20.0.0.35 test …...
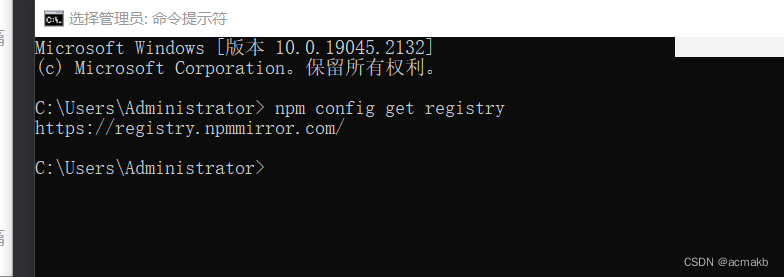
npm安装卡住问题(最新版)
npm安装卡住问题(最新版) 背景: 最近这两天用npm安装一些包的时候,发现一直卡住: 报错: idealTree:npm: sill idealTree buildDeps之前能用的现在不能用了,我一想,是不是源头的问题,还真是…...
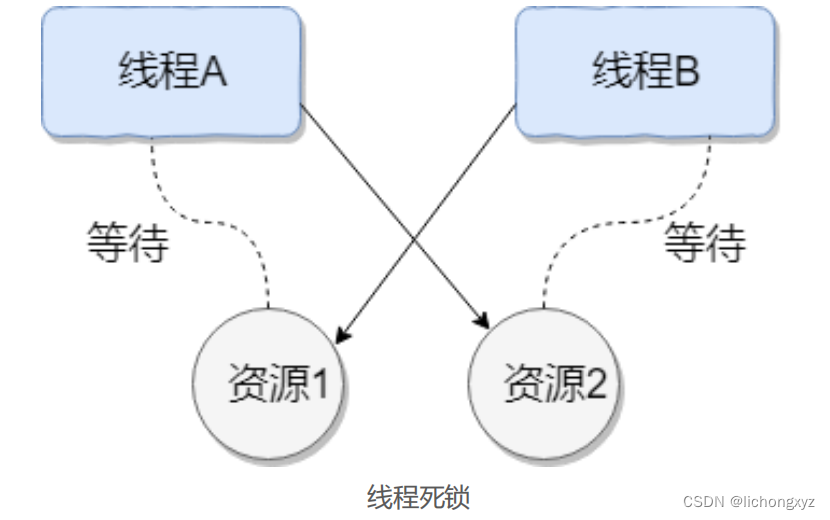
什么是线程死锁
死锁是指两个或两个以上的进程(线程)在执行过程中,由于竞争资 源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法推 进下去。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相…...
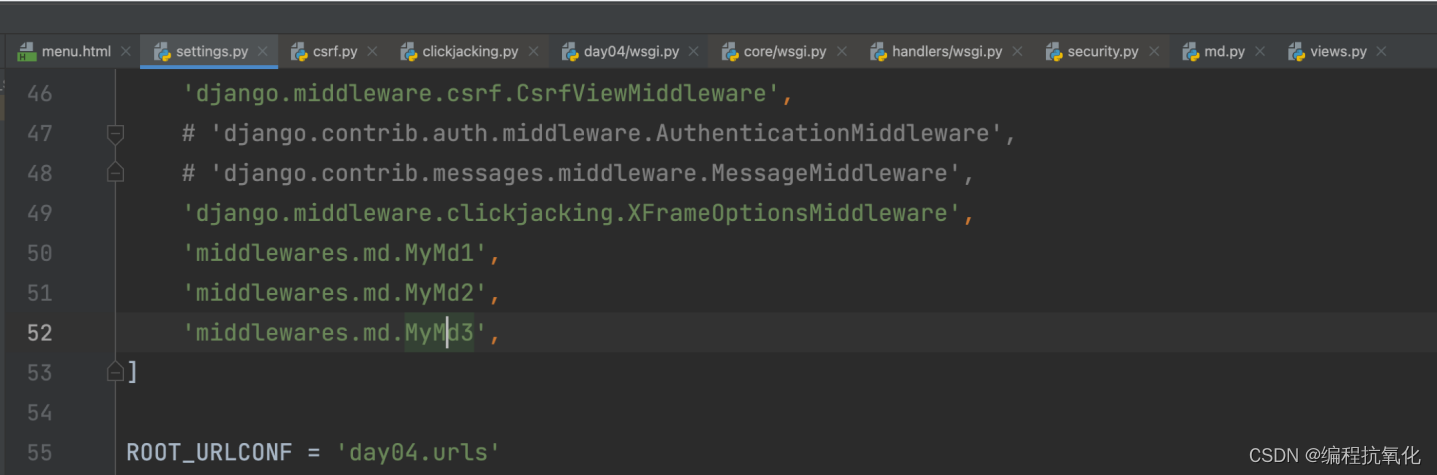
Django从入门到精通(二)
目录 三、视图 3.1、文件or文件夹 3.2、相对和绝对导入urls 3.3、视图参数requests 3.4、返回值 3.5、响应头 3.6、FBV和CBV FBV 四、静态资源 4.1、静态文件 4.2、媒体文件 五、模板 5.1、寻找html模板 5.2、模板处理的本质 5.3、常见模板语法 5.4、内置模板函…...

建筑物防雷检测安全接地应用解决方案
雷电是一种自然现象,具有极高的电压和电流,对建筑物及其内部设备、人员和财产可能造成严重的危害,如火灾、爆炸、电击、电磁干扰等。因此,建筑物必须采取有效的防雷措施,以保障建筑物的安全和可靠运行。建筑物防雷检测…...
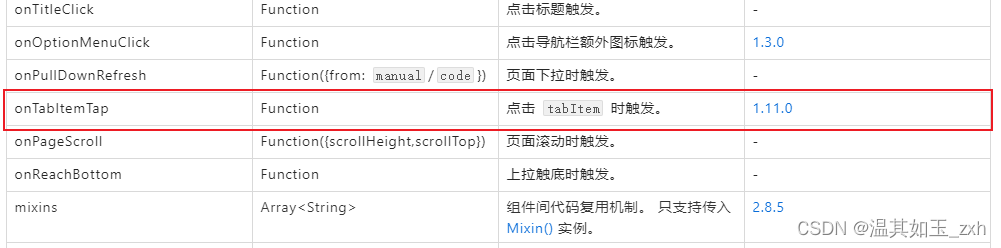
支付宝小程序开发踩坑笔记(支付宝、学习强国小程序)
1、接口请求安卓端回调 success,IOS 端回调 fail 原因:dataType 设置不对,默认是 json 格式,对返回数据会进行 json 解析,如果解析失败,就会回调 fail 。加密传输一般是 text 格式。 2、input 禁止输入空格…...
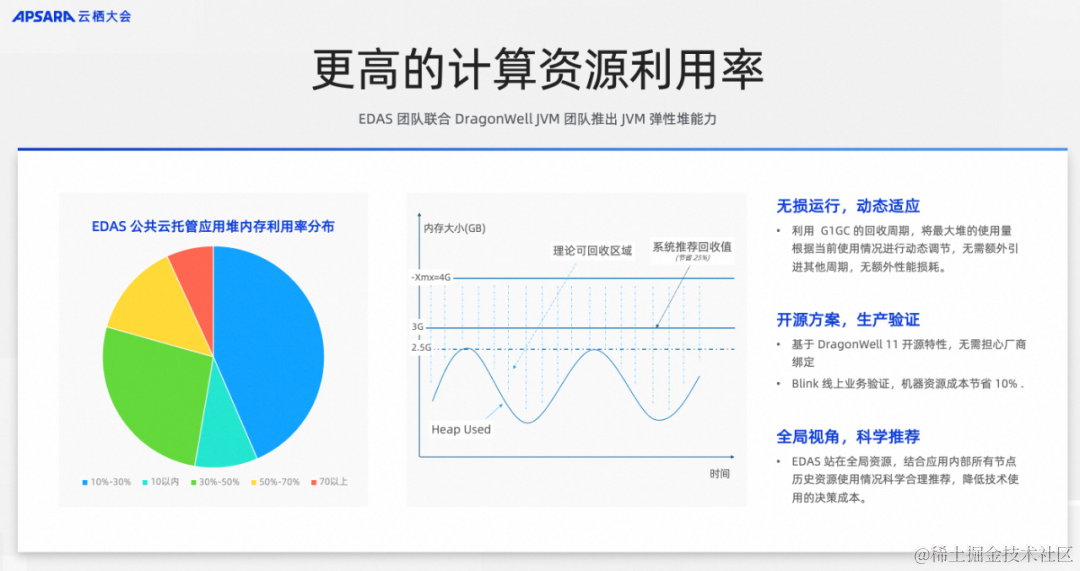
如何降低微服务复杂度丨云栖大会微服务主题分享实录
作者:谢吉宝 本文整理自阿里云资深技术专家、中间件负责人谢吉宝在2023云栖大会《极简微服务模式,降低微服务复杂度的最佳实践》的分享 2023 云栖大会现场 当面临复杂的挑战时,"分而治之"的方法往往能取得显著的效果。微服务架构…...
openresty 安装, nginx与 openresty
openresty VS nginx Nginx 是一款高性能的 Web 服务器和反向代理服务器,具备基础的功能如HTTP服务、负载均衡、反向代理以及动静分离等。它是许多互联网应用的核心组件,因其模块化和可扩展的设计而受到欢迎。1 OpenResty 是基于 Nginx 的 Web 平台&…...

多源视频流时空配准,搭建跨摄像机一体化轨迹推演计算平台
多源视频流时空配准,搭建跨摄像机一体化轨迹推演计算平台在数字孪生与视频孪生全域空间智能感知的建设进程中,各类管控场景普遍部署多品牌、多焦距、多布设姿态的异构摄像设备,衍生出大量编码格式各异、传输时延参差、时钟相位错位的多源异步…...

从零构建C++/CUDA推理引擎:深入解析yalm项目与LLM底层优化
1. 项目概述:从零构建一个高性能的C/CUDA推理引擎最近在深入研究大语言模型推理的性能优化,发现很多开源实现为了追求极致的性能,代码往往高度优化,甚至引入了动态并行等高级CUDA特性,这对想深入理解底层原理的开发者来…...

国产多模态大模型部署利器:深度解析陈天奇技术栈
国产多模态大模型部署利器:深度解析陈天奇技术栈 引言 在国产大模型“百模大战”的喧嚣浪潮中,我们的目光常常被那些能说会道、能文能图的多模态大模型本身所吸引。然而,一个同样关键却容易被忽视的问题是:如何让这些动辄数百亿…...

如何轻松下载B站4K大会员视频?这款开源工具让你三步搞定离线收藏
如何轻松下载B站4K大会员视频?这款开源工具让你三步搞定离线收藏 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 想象一下…...

Aura包管理器与Faur元数据服务器:了解Arch Linux包管理的终极解决方案
Aura包管理器与Faur元数据服务器:了解Arch Linux包管理的终极解决方案 【免费下载链接】aura A multilingual package manager for Arch Linux and the AUR. 项目地址: https://gitcode.com/gh_mirrors/aur/aura Aura是一个多语言包管理器,专为Ar…...

接入taotoken服务后stm32设备端api调用量的可视化分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 接入taotoken服务后stm32设备端api调用量的可视化分析 1. 背景与需求 在嵌入式AI应用开发中,将大模型能力集成到STM32…...

PET/SPECT医疗影像设备液冷系统核心技术解析
1. PET/SPECT扫描仪的热管理挑战在医疗影像设备领域,正电子发射断层扫描(PET)和单光子发射计算机断层扫描(SPECT)作为核医学成像的两种核心技术,其运行过程中产生的热量管理一直是工程设计的核心难题。这类…...

AD9361快速切频点秘籍:不用复杂计算,一张2400-2480MHz的查表配置表直接拿去用
AD9361射频芯片极速切频实战:2400-2480MHz预计算配置表与查表法优化 在Wi-Fi 6E和蓝牙5.3设备爆发式增长的今天,射频工程师每天需要处理数百次频段切换测试。传统AD9361配置流程中,每次切换频点都要重新计算VCO分频比、电荷泵电流等12个关键参…...
介绍(提供DNS服务器)骨干网络、Peering对等互联、MPLS、带宽、延迟、丢包、抖动、SD-WAN)
ISP运营商(Internet Service Provider 互联网服务提供商)介绍(提供DNS服务器)骨干网络、Peering对等互联、MPLS、带宽、延迟、丢包、抖动、SD-WAN
文章目录ISP 是什么?一文读懂互联网服务提供商(Internet Service Provider)一、ISP 是什么?二、ISP 在网络中的位置三、ISP 的核心作用1. 提供互联网接入四、ISP 如何分配 IP 地址?五、ISP 与 DNS 的关系六、ISP 的网络…...

网易有道发布企业级大模型聚合服务ThinkFlow,终结多模型适配困局,推动应用工程化
5月13日,网易有道正式发布企业级大模型聚合服务ThinkFlow。它将20余款主流大模型统一调度,解决多模型适配难题,还保障稳定、控制成本与安全,推动大模型应用工程化。ThinkFlow:多模型聚合新方案据有道智云平台消息&…...