【百度Apollo】自动驾驶规划技术:实现安全高效的智能驾驶

⛳️ 推荐
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。
文章目录
- ⛳️ 推荐
- 引言
- 一、路径规划的基本概念
- 1.1路径规划的定义和作用
- 1.2 路径规划的挑战和技术要求
- 二、Apollo自动驾驶规划技术的核心原理
- 2.1 Apollo自动驾驶规划技术
- 2.2 路径规划算法的基本原理
- 2.3 行为决策算法的基本原理和方法
- 三、多模态规划的优势
- 3.1 多模态规划的概念和意义
- 3.2Apollo自动驾驶规划技术中的多模态规划实现方式和策略
引言
一、路径规划的基本概念
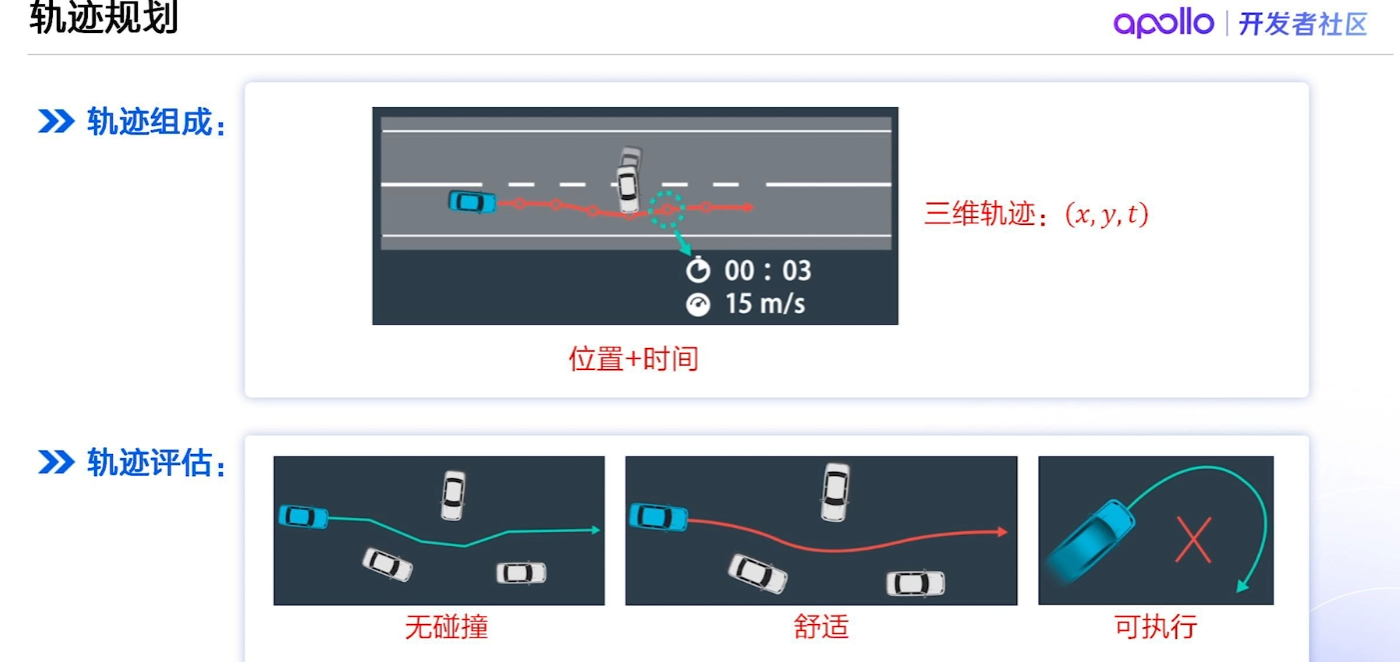
路径规划是指根据给定的起点和终点,在给定的环境中找到一条最优或者满足特定约束条件的路径。在自动驾驶中,路径规划是指通过算法确定车辆在道路上的最佳行驶路径,以实现安全、高效的驾驶。
1.1路径规划的定义和作用
路径规划是指在给定起点和终点的情况下,确定一条从起点到终点的最佳路径的过程。它是计算机科学、人工智能和自动化领域中的一个重要问题,广泛应用于自动驾驶、物流配送、无人机导航等领域。
路径规划的作用主要有以下几个方面:
-
寻找最短路径:路径规划可以帮助找到起点到终点之间最短的路径,从而节省时间和资源。在交通领域中,最短路径可以帮助驾驶员选择最优的行驶路线,减少行驶距离和时间。
-
避开障碍物:路径规划可以考虑到路上的障碍物或者限制条件,帮助规避障碍物并找到可行的路径。在自动驾驶领域中,路径规划可以帮助车辆避免碰撞障碍物,保证行驶安全。
-
优化驾驶策略:路径规划可以结合实际交通状况和驾驶需求,选择合适的驾驶策略。例如,在高速公路上行驶时,路径规划可以考虑到车流量和限速等因素,选择合适的行驶速度和车道。
-
考虑多种因素:路径规划可以综合考虑多种因素,如路况、交通信号灯、限制条件等,选择合适的路径。例如,在城市道路上行驶时,路径规划可以考虑到拥堵情况和交通信号灯的状态,选择最优的行驶路线。
1.2 路径规划的挑战和技术要求
路径规划的挑战和技术要求 路径规划面临着一些挑战和技术要求。
- 首先,道路环境复杂多变,包括不同类型的道路、交通标志、交通信号等,路径规划算法需要能够适应不同的交通场景。
- 其次,路径规划需要考虑到车辆的动力学约束,如最大加速度、最大转向角等,以确保驾驶的安全性和稳定性。另外,路径规划还需要考虑到实时感知和决策,能够及时应对交通变化和紧急情况。
二、Apollo自动驾驶规划技术的核心原理
2.1 Apollo自动驾驶规划技术
Apollo自动驾驶规划技术是基于百度Apollo平台开发的一套规划算法和系统。它的整体架构包括感知模块、定位模块、规划模块和控制模块等。在规划模块中,主要实现了路径规划算法和行为决策算法。
2.2 路径规划算法的基本原理
路径规划算法是Apollo自动驾驶规划技术的核心之一。它的基本原理是根据车辆当前位置和目标位置,结合道路环境和约束条件,通过算法计算出最佳路径。常用的路径规划算法包括A*算法、Dijkstra算法和RRT算法等。
2.3 行为决策算法的基本原理和方法
行为决策算法是Apollo自动驾驶规划技术的另一个重要组成部分。它的基本原理是根据感知模块提供的道路环境信息,通过算法判断当前驾驶状态和交通场景,并做出相应的决策。常用的行为决策算法包括状态机、强化学习和深度学习等。
# 导入必要的库
import numpy as np# 定义路径规划函数
def path_planning(start, goal, obstacles):# 使用A*算法计算最佳路径# ...# 返回最佳路径return path# 定义行为决策函数
def behavior_decision(path, obstacles):# 根据路径和障碍物信息,判断行驶策略# ...# 返回行驶决策return decision# 定义多模态规划函数
def multimodal_planning(start, goal, obstacles):# 调用路径规划函数,得到最佳路径path = path_planning(start, goal, obstacles)# 调用行为决策函数,得到行驶决策decision = behavior_decision(path, obstacles)# 返回最佳路径和行驶决策return path, decision# 示例使用
start = (0, 0) # 起点坐标
goal = (10, 10) # 终点坐标
obstacles = [(2, 2), (3, 4), (5, 7)] # 障碍物坐标列表# 调用多模态规划函数
path, decision = multimodal_planning(start, goal, obstacles)# 打印结果
print("最佳路径:", path)
print("行驶决策:", decision)三、多模态规划的优势
3.1 多模态规划的概念和意义
多模态规划是指在路径规划中综合考虑不同的驾驶模式和策略,以适应不同的交通场景和驾驶需求。传统的路径规划算法通常只考虑一种驾驶模式,无法适应复杂的道路环境。而多模态规划能够根据不同的驾驶场景,选择合适的驾驶模式和策略,提供更灵活、更智能的驾驶体验。
多模态规划的意义在于优化驾驶过程中的效率和安全性。通过根据道路环境和驾驶需求,选择最佳的驾驶模式和策略,可以提高驾驶效率、减少能耗,并且能够更好地适应不同的交通场景和路况。
3.2Apollo自动驾驶规划技术中的多模态规划实现方式和策略
在Apollo自动驾驶规划技术中,多模态规划的实现方式和策略主要包括以下几个方面:
-
驾驶模式选择:
根据驾驶场景和需求,选择合适的驾驶模式。例如,高速公路驾驶模式、城市道路驾驶模式或者停车模式等。不同的驾驶模式具有不同的行驶策略和约束条件。 -
路径规划策略:
根据驾驶模式和目标位置,选择合适的路径规划策略。例如,对于高速公路驾驶模式,路径规划策略可能更注重快速行驶和减少换道次数;而对于城市道路驾驶模式,则可能更注重避免拥堵和遵守交通规则。 -
速度规划策略:
根据驾驶模式和道路环境,选择合适的速度规划策略。例如,在高速公路驾驶模式下,可以选择更高的行驶速度;而在城市道路驾驶模式下,需要根据交通流量和行人情况等因素,适当降低行驶速度。 -
转向策略:
根据驾驶模式和道路环境,选择合适的转向策略。例如,在高速公路驾驶模式下,可以选择更大的转向角度以快速换道;而在城市道路驾驶模式下,需要更小的转向角度以适应狭窄的道路和复杂的交通情况。
通过以上多模态规划的实现方式和策略,Apollo自动驾驶规划技术能够根据不同的交通场景和驾驶需求,提供更智能、更灵活的驾驶体验,并且提高驾驶效率和安全性。
相关文章:
【百度Apollo】自动驾驶规划技术:实现安全高效的智能驾驶
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…...

《C程序设计》上机实验报告(五)之一维数组二维数组与字符数组
实验内容: 1.运行程序 #include <stdio.h> void main( ) { int i,j,iRow0,iCol0,m; int x[3][4]{{1,11,22,33},{2,28,98,38},{3,85,20,89}}; mx[0][0]; for(i0;i<3;i) for(j0;j<4;j) if (x[i][j]>m) { mx[i][j]; iRowi…...

【BUG】联想Y7000电池电量为0且无法充电解决方案汇总
因为最近火灾很多,所以昨天夜晚睡觉的时候把插线板电源关掉了,电脑也关机了。 各位一定要注意用电安全,网上的那些事情看着真的很难受qvq。 第二天早上起床的时候一看发现电脑直接没电了,插上电源后也是显示 你一定要冲进去啊(ू˃…...

centos7常用命令之安装插件2
centos7安装插件1 7、kibana 【启动kibana,需要调整这个配置文件(/opt/kibana-6.3.0/config/kibana.yml)的一处ip地址,因为每次虚拟机的ip地址可能会有所不同, 同时访问页面地址的ip:5601时,ip地址也对应修改】 1.解压缩包 cd /opt/ tar -xvf kibana-6.3.0-linux-x…...
MATLAB - 仿真单摆的周期性摆动
系列文章目录 前言 本例演示如何使用 Symbolic Math Toolbox™ 模拟单摆的运动。推导摆的运动方程,然后对小角度进行分析求解,对任意角度进行数值求解。 一、步骤 1:推导运动方程 摆是一个遵循微分方程的简单机械系统。摆最初静止在垂直位置…...
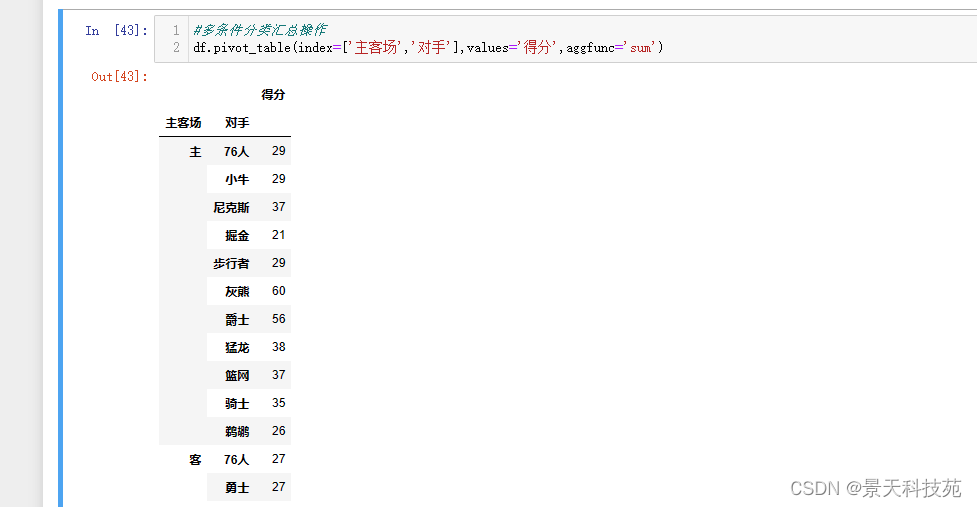
Pandas进阶--map映射,分组聚合和透视pivot_table详解
文章目录 1.Pandas的map映射(1)映射(2)map充当运算工具 2.数据分组和透视(1)分组统计 - groupby功能 是pandas最重要的功能(2)聚合agg 3.透视表pivot_table(1)…...

Visual Studio 和Clion配置Cocos2d-x环境
Visual Studio 和Clion配置Cocos2d-x环境 我就不贴图片的,懒得上传图床。懒。开发环境: 系统: Window11 编译器: CMake MSVC 开发工具:Clion or Visual Studio 请自行配置好,Python2.7,和Cmake Cocos2d-x下载…...
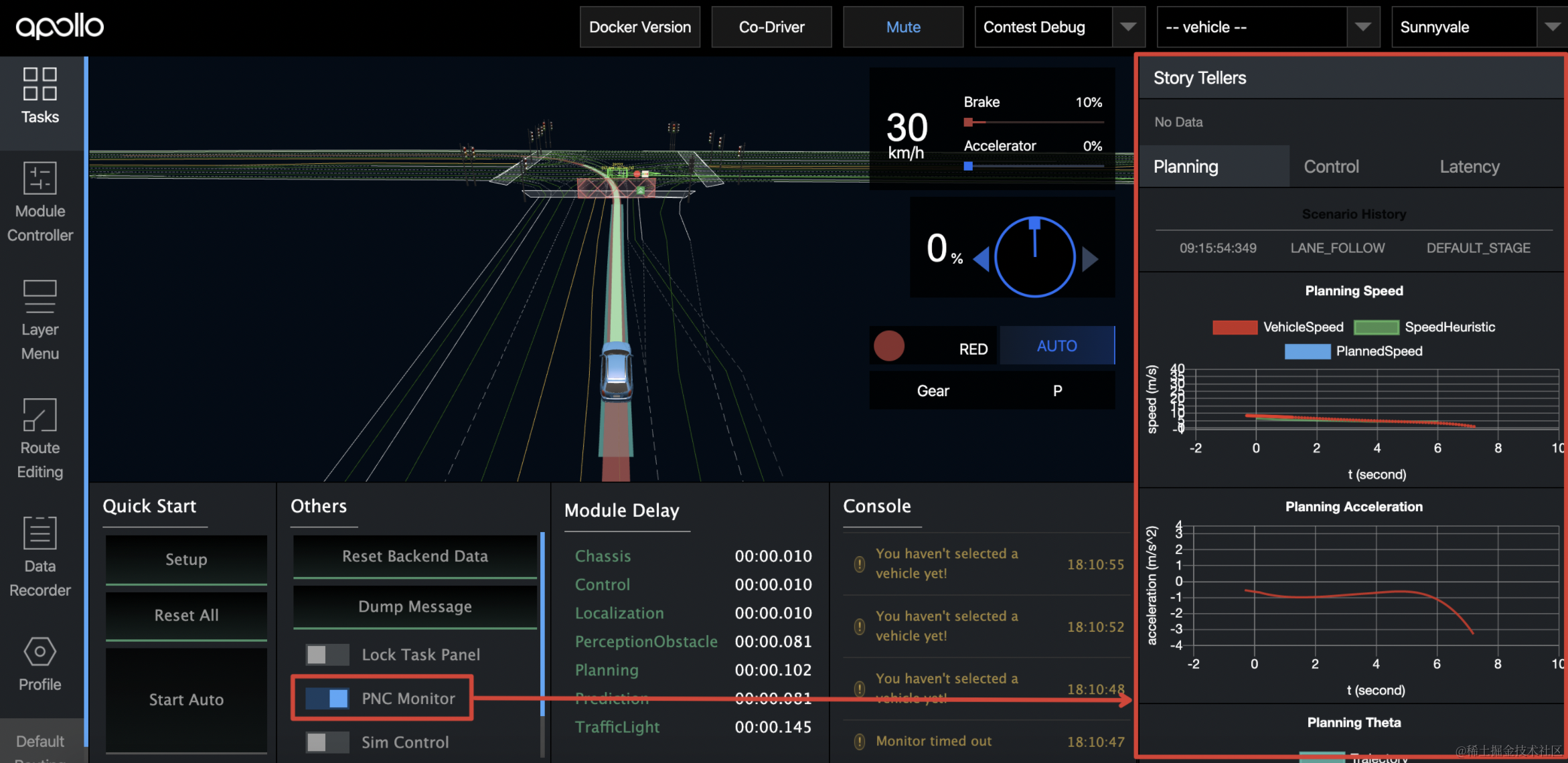
【百度Apollo】本地调试仿真:加速自动驾驶系统开发的利器
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…...

ztest中ddof起什么作用
⭐️ statsmodels 中 ztest 基本使用 statsmodels 也是一个强大的统计分析库,提供了丰富的统计模型和检验功能。对于 Z 检验,statsmodels 提供了 ztest 函数。 以下是使用 statsmodels 进行 Z 检验的示例: from statsmodels.stats.weights…...

linux 主机无法联网问题
主机不能联网 一 查看当前ip ping路由 ifconfig wlan0 wlan0: flags4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500inet 192.168.2.78 netmask 255.255.255.0 broadcast 192.168.2.255ping 192.168.2.1查看是否能ping通 二 查看路由表 route -n Destination G…...
2024/1/27 备战蓝桥杯 1-1
目录 求和 0求和 - 蓝桥云课 (lanqiao.cn) 成绩分析 0成绩分析 - 蓝桥云课 (lanqiao.cn) 合法日期 0合法日期 - 蓝桥云课 (lanqiao.cn) 时间加法 0时间加法 - 蓝桥云课 (lanqiao.cn) 扫雷 0扫雷 - 蓝桥云课 (lanqiao.cn) 大写 0大写 - 蓝桥云课 (lanqiao.cn) 标题…...
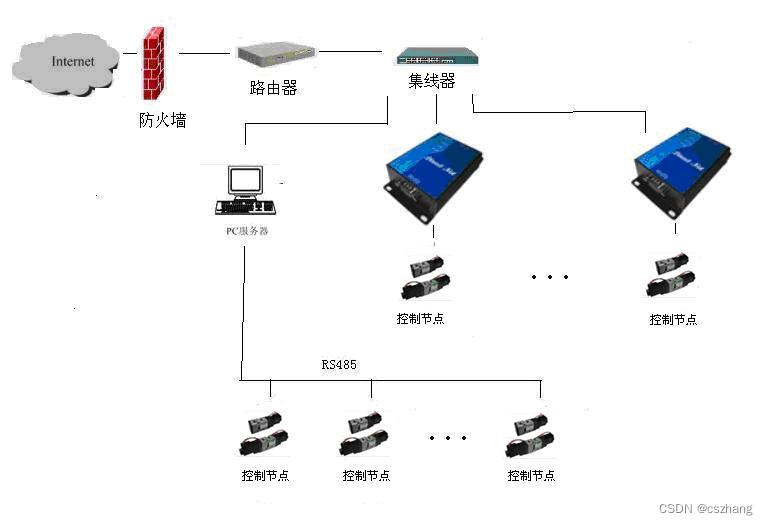
支持下一代网络IpV6的串口服务器,IpV6串口485接口转网口
和IPv4比较,IPv6有两个极具吸引力的特点:一个是IPv6采用的128位地址格式,而IPv4采用32位的地址格式,因此IPv6使地址空间增大了296;另一个是IPv6物联网数据业务具有更强的支持能力,成为未来物联网的重要协议…...

uniapp H5 实现上拉刷新 以及 下拉加载
uniapp H5 实现上拉刷新 以及 下拉加载 1. 先上图 下拉加载 2. 上代码 <script>import DragableList from "/components/dragable-list/dragable-list.vue";import {FridApi} from /api/warn.jsexport default {data() {return {tableList: [],loadingHi…...
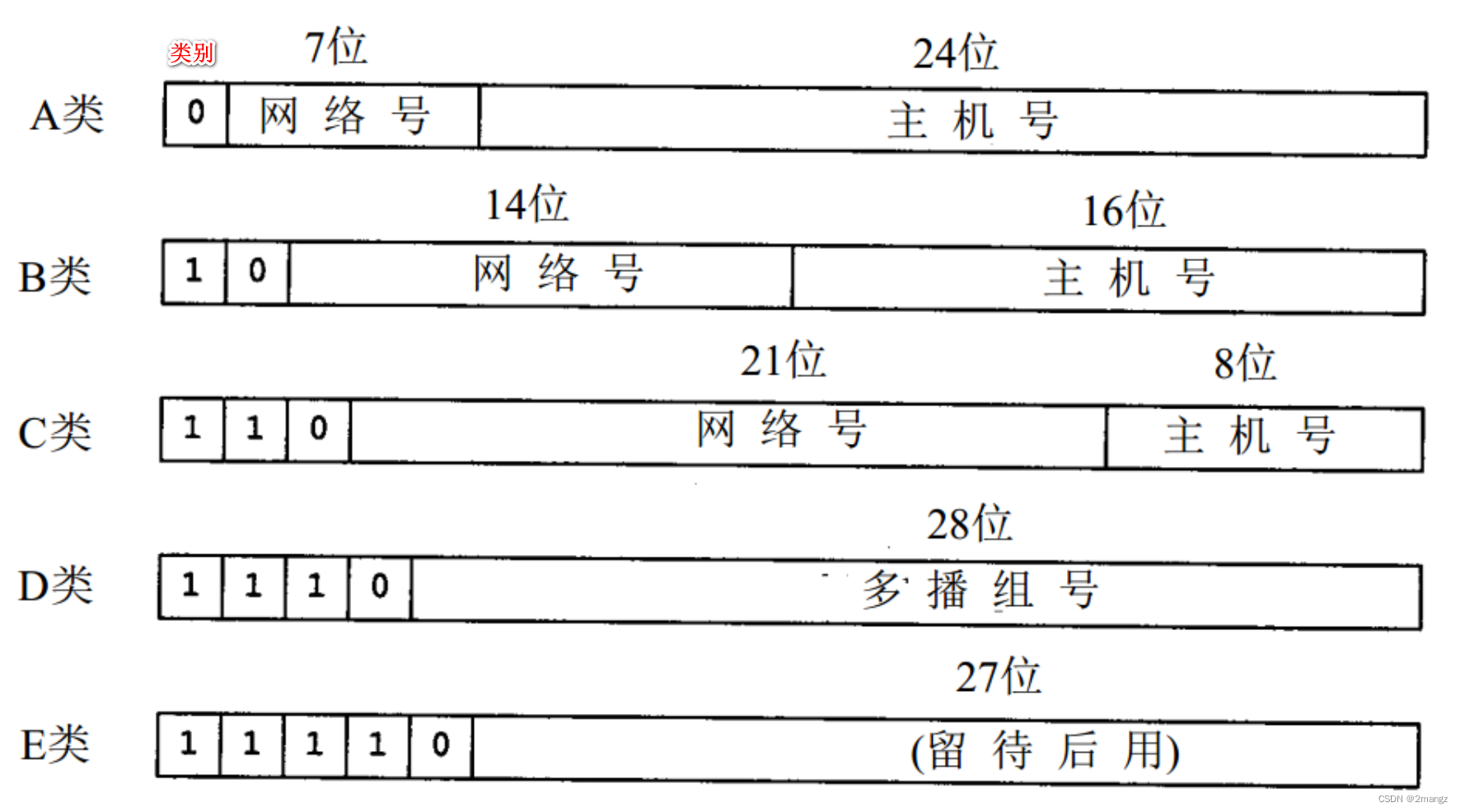
网络工程师必学知识:2、IPv4和IPv6地址划分
网络工程师必学知识:2、IPv4和IPv6地址划分 1.概述:2.IPv4:地址划分:有类划分,无类划分。一、有类划分:分为5类。ABCDE,掩码分别位8、16、24、28、27取值范围:出类别bit不变…...

Rust - 变量
不管学什么语言好像都得从变量开始,不过只需要懂得大概就可以了。 但在Rust里不先把变量研究明白后面根本无法进行… 变量绑定 变量赋值❌ 变量绑定✔️ Rust中没有“赋值”一说,而是称为绑定。 int a 3; //C中的变量赋值 a 3; //python中的…...

【Linux】压缩脚本、报警脚本
一、压缩搅拌 要求: 写一个脚本,完成如下功能 传递一个参数给脚本,此参数为gzip、bzip2或者xz三者之一; (1) 如果参数1的值为gzip,则使用tar和gzip归档压缩/etc目录至/backups目录中,并命名为/backups/etc…...

用Flask打造一个大模型智能问答WEB网站
目前已经有很多类似GPT的大模型开源,可以提供类似ChatGPT的智能问答功能。我也基于这些开源模型,用Flask来建立一个智能问答网站,可以方便用户建立自己的ChatGPT系统。 这个网站需要提供用户登录功能,对已登录的用户,可以在网站上提出问题,并由大模型处理后返回答案。演…...

学习python第三天
一.数据类型 1.获取数据类型 x 10 print(type(x))""" 输出 <class int> """2.复数类型(complex)详解 复数(Complex)是 Python 的内置类型,直接书写即可。换句话说,…...
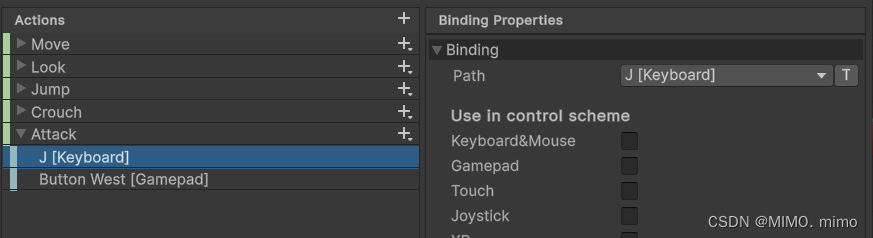
(M)UNITY三段攻击制作
三段攻击逻辑 基本逻辑: 人物点击攻击按钮进入攻击状态(bool isAttack) 在攻击状态下, 一旦设置的触发器(trigger attack)被触发,设置的计数器(int combo)查看目前攻击…...

PHP的线程安全与非线程安全模式选哪个
曾经初学PHP的时候也很困惑对线程安全与非线程安全模式这块环境的选择,也未能理解其中意。近来无意中看到一个教程对线程安全(饿汉式),非线程安全(懒汉式)的描述,虽然觉得现在已经能够很明了透彻…...

ReAct 循环的 50 行 Go 实现,逐行拆解
ReAct 循环的 50 行 Go 实现,逐行拆解 系列「企业级 AI Agent 实现拆解」第三篇。上一篇讲了 Session 聚合根和状态机——状态怎么迁移、事件怎么发、终态怎么判。但状态机本身是静态的,谁在驱动这些迁移? 答案是 RunTurnHandler.Handle()——…...

LimboAI:Godot 4原生行为树+黑板+状态机AI框架实战指南
1. 这不是又一个“AI插件”,而是Godot 4里真正能跑通行为树黑板状态机闭环的AI开发框架我第一次在Godot 4.2项目里把LimboAI的BTTaskMoveTo节点拖进行为树编辑器、连上BlackboardKey、再绑定到一个带NavigationAgent3D的NPC身上,按下F5运行——那个角色真…...

Webdash API详解:如何通过RESTful接口扩展和集成外部系统
Webdash API详解:如何通过RESTful接口扩展和集成外部系统 【免费下载链接】webdash 🔥 Orchestrate your web project with Webdash the customizable web dashboard 项目地址: https://gitcode.com/gh_mirrors/we/webdash Webdash作为一款可定制…...

不是碳基,也不是硅基!你好,我是金蝶灵基,企业AI原生操作系统!
AI是危还是机?自年初小龙虾“爆炸”以来,很多企业服务巨头都或主动或被动地陷入了深深地思考:连一直仰望并追捧的偶像——Salesforce都开始快速变革,我们能无动于衷吗?这半年以来,中国软件网注意到…...

大模型稀疏激活:MoE架构的工程实践与负载均衡
1. 这不是参数堆砌,而是“动态稀疏激活”的工程革命你可能已经看到过那条刷屏的推文:“GPT-4有1.8万亿参数,但每生成一个token只用其中2%。”——这句话像一道闪电劈开了大模型圈的认知惯性。它背后没有玄学,没有营销话术…...

避开BLE开发第一个坑:搞懂广播帧里的TxAdd、ChSel字段,让你的智能硬件不再‘隐身’
避开BLE开发第一个坑:广播帧关键字段解析与实战排查指南 当你第一次将精心编写的固件烧录进蓝牙芯片,满心期待地用手机扫描设备时,却发现屏幕上空空如也——这种"设备隐身"的挫败感,几乎每个BLE开发者都经历过。问题的根…...

容器资源限制
1、创建一个临时容器c1 docker run -it --namec1 --rm centos:v1监控容器的资源使用情况 docker statsmemload工具可以直接占用消耗资源 将memload工具拷贝到c1容器的opt目录下 docker cp memload-7.0-1.r29766.x86_64.rpm c1:/opt在运行的容器中安装上传的安装包 rpm -ivh /op…...

2026年,揭秘浙江废铝回收界的明星企业!
引言:废铝回收,绿色循环的先锋随着我国经济的快速发展和工业生产的不断扩大,废铝回收行业逐渐成为资源循环利用的重要环节。在浙江省,众多废铝回收企业脱颖而出,其中腾兰再生资源回收有限公司以其卓越的表现࿰…...

AI测试工具百花齐放,选型之前先搞懂这4个核心问题
在软件测试领域,AI 测试工具正以前所未有的速度涌现。从智能用例生成、缺陷预测到自愈型自动化测试,厂商们构建起一个眼花缭乱的技术矩阵。然而,当团队真正面临选型决策时,却发现“百花齐放”往往意味着“乱花渐欲迷人眼”。许多团…...

Playwright Python3.7+安装失败根因与一次成功配置指南
1. 为什么Playwright在Python3.7环境下总“装不上”?——这不是你的pip问题,是环境认知偏差 你刚在新配的Mac M2上敲下 pip install playwright ,终端卡在 Building wheel for playwright... 十分钟不动;或者Windows上反复提示…...