Linux第56步_根文件系统第3步_将busybox构建的根文件系统烧录到EMMC
1、第1次将“rootfs”打包
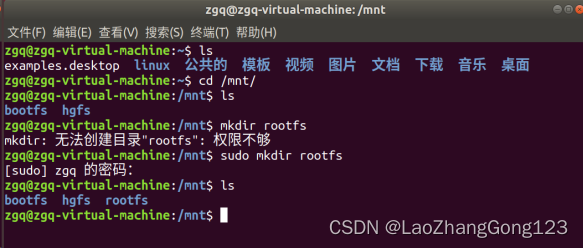
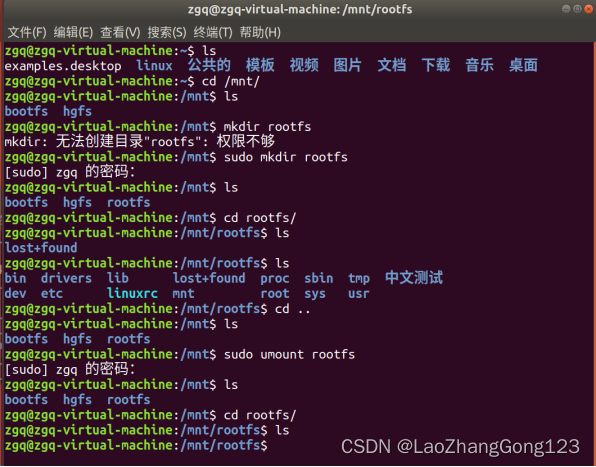
1)、打开第1个终端,准备在“mnt”目录下创建挂载目录“rootfs”;
输入“ls回车”
输入“cd /mnt回车”
输入“ls回车”,查看“mnt”目录下的文件和文件夹
输入“sudo mkdir rootfs回车”,在“mnt”目录下新建一个“rootfs”
输入密码“123456回车”
输入“ls回车”,查看“mnt”目录下的文件和文件夹
2)、打开第2个终端,准备在“/linux/rootfs”目录下创建磁盘“rootfs.ext4”
输入“ls回车”
输入“cd linux回车”,切换到“linux”目录
输入“ls回车”,查看“linux”目录下的文件和文件夹
输入“mkdir rootfs回车”,新建“rootfs”目录
输入“ls回车”,查看“linux”目录下的文件和文件夹
输入“cd rootfs回车”,切换到“rootfs”目录
输入“ls回车”,查看“/home/zgq/linux/rootfs”目录下的文件和文件夹
输入“dd if=/dev/zero of=rootfs.ext4 bs=1M count=1024回车”,分配1G空间给“rootfs.ext4”
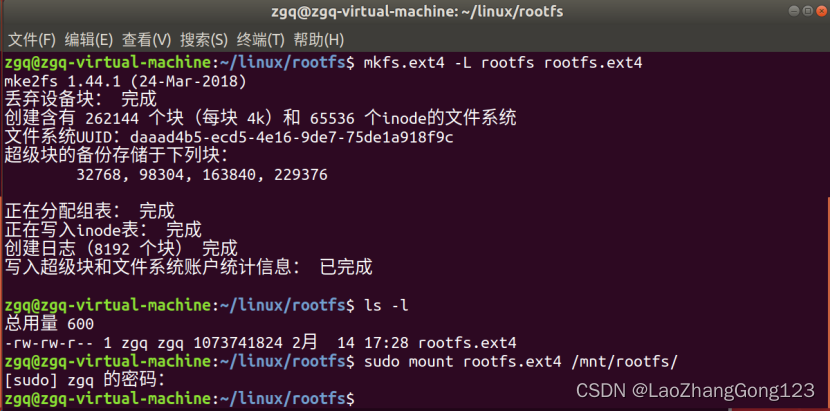
输入“mkfs.ext4 -L rootfs rootfs.ext4回车”,将“rootfs”格式化
输入“ls -l回车”,查看“rootfs”目录下的文件和文件夹
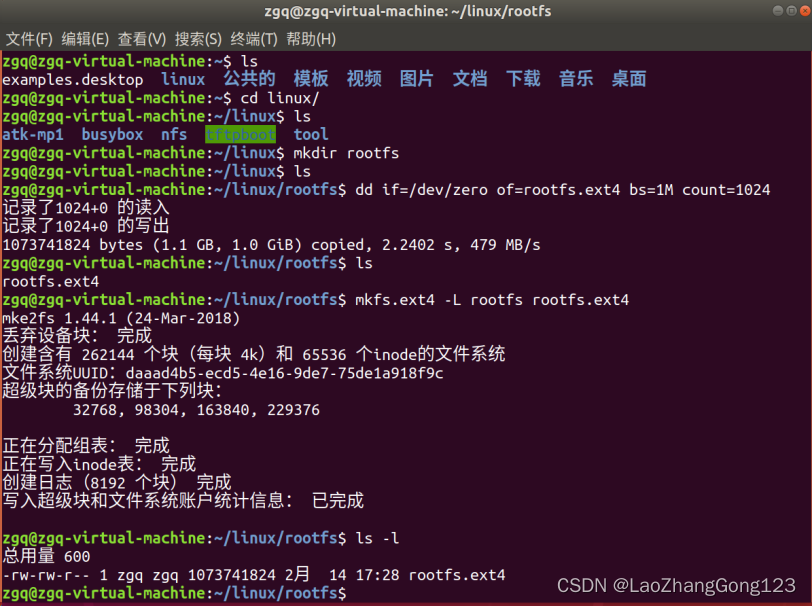
“rootfs.ext4”有1073741824个字节=1G字节
3)、挂载磁盘
输入“sudo mount rootfs.ext4 /mnt/rootfs/回车”,将“rootfs.ext4”挂载在“/mnt/rootfs/”目录下
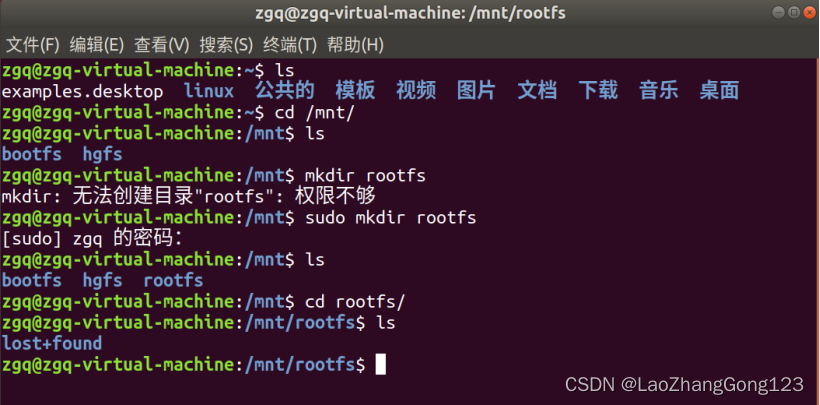
4)、回到第1个打开的终端,查看是否挂载成功;
输入“cd rootfs/回车”,切换到“/mnt/rootfs/”
输入“ls回车”,查看“rootfs”目录下的文件和文件夹
5)、准备打包的文件,将“/home/zgq/linux/nfs/rootfs/”目录下的“所有文件和文件夹”拷贝到“/mnt/rootfs/”的目录中
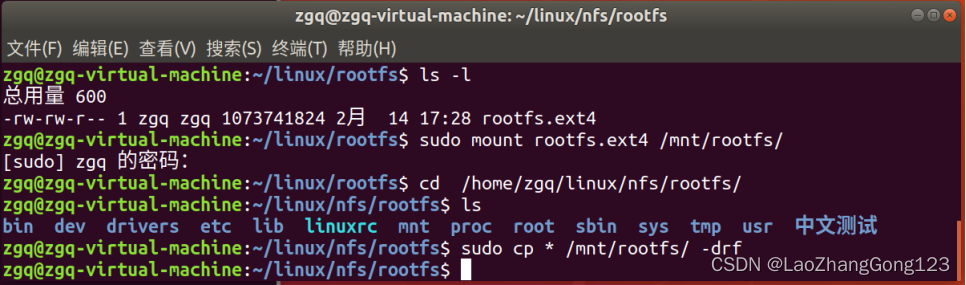
回到第2个打开的终端,输入“cd /home/zgq/linux/nfs/rootfs/回车”,切换到“/home/zgq/linux/nfs/rootfs/”目录
输入“ls回车”,查看“rootfs”目录下的文件和文件夹
输入“sudo cp * /mnt/rootfs/ -drf 回车”,执行拷贝
6)、回到第1个打开的终端,卸载磁盘
输入“ls回车”,查看“rootfs”目录下的文件和文件夹,发现该文件夹有新文件
输入“cd ..回车”,返回到“mnt”目录
输入“ls回车”,查看“mnt”目录下的文件和文件夹
输入“sudo umount rootfs回车”卸载掉“rootfs”
输入密码“123456回车”
输入“ls回车”,查看“mnt”目录下的文件和文件夹
输入“cd rootfs回车”,切换到“rootfs”目录
输入“ls回车”,查看“rootfs”目录下的文件和文件夹,发现该文件夹为空;
7)、回到第2个打开的终端,查看打包好的文件
输入“cd /home/zgq/linux/rootfs回车”,切换到“/home/zgq/linux/rootfs”目录
输入“ls回车”,查看“rootfs”目录下的文件和文件夹
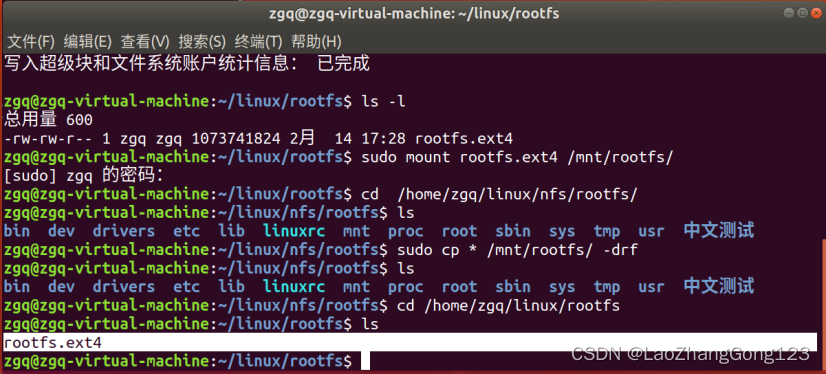
这个rootfs.ext4就是打包好的文件
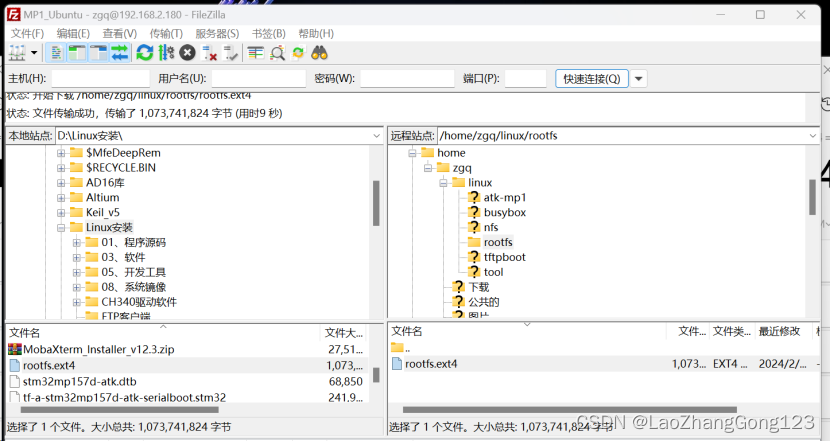
8)、使用FileZilla将“rootfs.ext4”下载到“windows”中
9)、将“rootfs.ext4”拷贝到“C:\Program Files\STMicroelectronics\images\my-tfa”目录中

2、将“bootfs”重新打包
1)、准备打包文件:
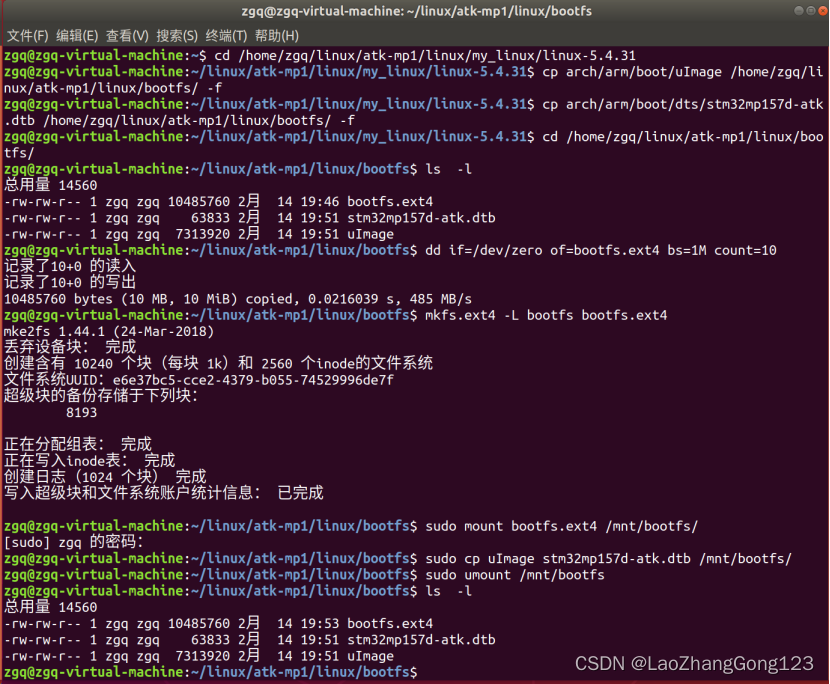
输入“cd /home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31”
输入“cp arch/arm/boot/uImage /home/zgq/linux/atk-mp1/linux/bootfs/ -f回车”,执行文件拷贝;
输入“cp arch/arm/boot/dts/stm32mp157d-atk.dtb /home/zgq/linux/atk-mp1/linux/bootfs/ -f回车”,执行文件拷贝
查看目录下的“uImage”和“stm32mp157d-atk.dtb”有多少字节:
输入“cd /home/zgq/linux/atk-mp1/linux/bootfs/回车”切换到“/home/zgq/linux/atk-mp1/linux/bootfs/”目录
输入“ls -l回车”,列出“bootfs”目录下的文件和文件夹
输入“dd if=/dev/zero of=bootfs.ext4 bs=1M count=10回车”
使用“dd命令”创建一个名为“bootfs.ext4”的磁盘;
“of”指定磁盘名字为“bootfs.ext4”;
“bs”指定磁盘输入/输出块大小为1MB;
“count”指定磁盘的块数量为 10个;
输入“mkfs.ext4 -L bootfs bootfs.ext4回车”
使用“mkfs.ext4”将“bootfs.ext4磁盘”格式化为“ext4”格式。
输入“sudo mount bootfs.ext4 /mnt/bootfs/回车”,
使用“mount命令”将“bootfs.ext4”磁盘挂载到“/mnt/bootfs”目录下;
输入密码“123456回车”
输入“sudo cp uImage stm32mp157d-atk.dtb /mnt/bootfs/回车”
将“uImage”和“stm32mp157d-atk.dtb”拷贝到“/mnt/bootfs/”目录中;
输入“sudo umount /mnt/bootfs回车”,使用“umount”卸载掉“bootfs”
输入“ls -l回车”,列出“bootfs”目录下的文件和文件夹
2)、使用FileZilla将“bootfs.ext4”下载到“windows”中
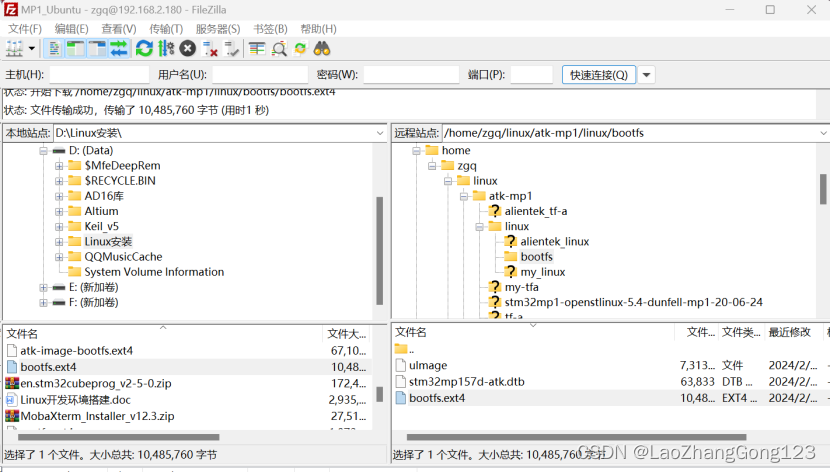
3)、将“bootfs.ext4”拷贝到“C:\Program Files\STMicroelectronics\images\my-tfa”目录中
3、使用“Notepad++”修改“tf-a.tsv”
1)、修改后,见下图:
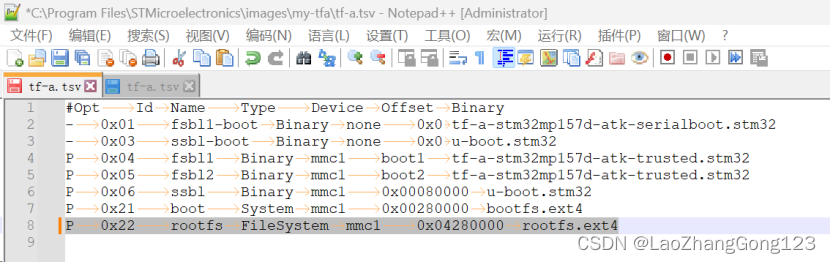
2)、保存“tf-a.tsv”,关闭文件。
4、烧录
1)、关闭虚拟机,防止开发板连接到虚拟机
2)、将开发板上拨码开关拨到“000”位置
3)、将USB导线连接电脑的USB3.0接口,另外一端连接开发板的USB OTG接口;
4)、将USB导线连接电脑的USB3.0接口,另外一端连接到开发板的USB TTL接口;
5)、双击“STM32CubeProgrammer”图标
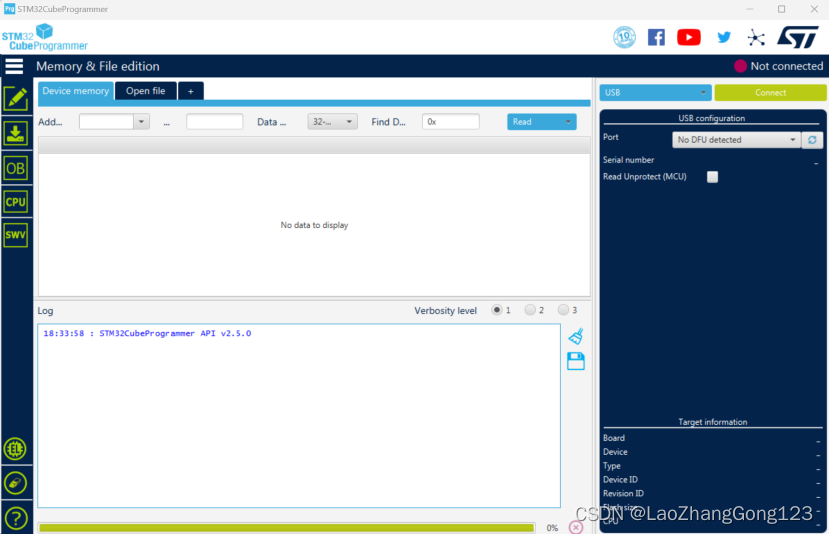
6)、选择上图中的USB,然后点击“Connect”
7)、点击“刷新”,直到出现USB1,表示连接成功。
8)、点击“Open file”,找到
“C:\Program Files\STMicroelectronics\images\my-tfa”目录下“tf-a.tsv”打开。
9)、点击“Browse”,打开
“C:\Program Files\STMicroelectronics\images\my-tfa”目录。
10)、点击“选择文件夹”
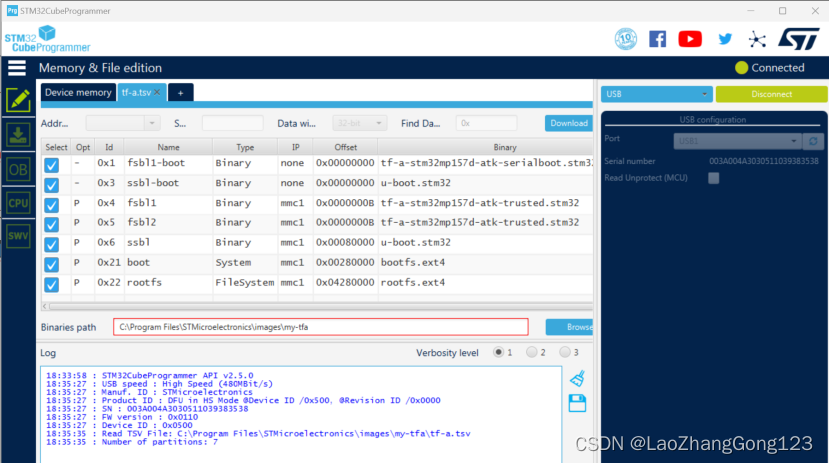
11)、点击“Download”

12)、点击“确定”
13)、将拨码开关设置为“010”
14)、按下开发板的“复位按钮”,重新启动开发板。
5、从EMMC启动测试
1)、在串口查看EMMC是否烧录了“uImage”和“stm32mp157d-atk.dtb”
输入“ext4ls mmc 1:2回车”查看EMMC分区2“内核镜像”有哪些文件和目录
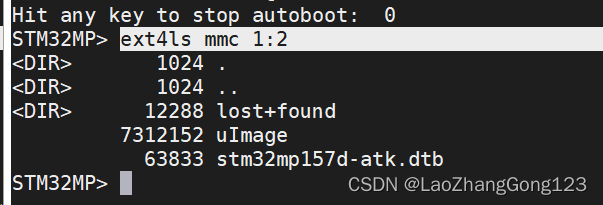
发现“uImage”和“stm32mp157d-atk.dtb”
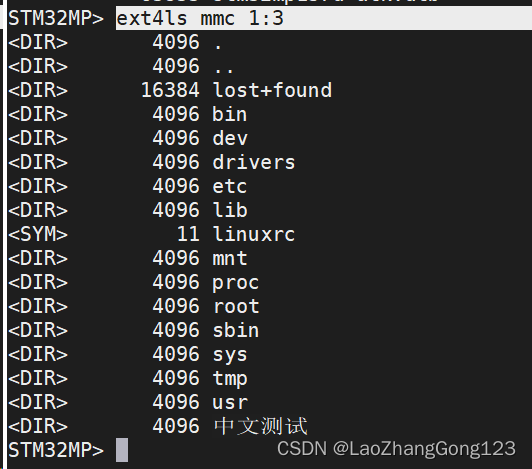
2)、输入“ext4ls mmc 1:3回车”查看EMMC分区3“根文件系统”有哪些文件和目录
3)、设置“bootcmd和bootargs”这两个环境变量,从EMMC启动linux系统
输入setenv bootcmd 'ext4load mmc 1:2 c2000000 uImage;ext4load mmc 1:2 c4000000 stm32mp157d-atk.dtb;bootm c2000000 - c4000000'
输入setenv bootargs 'console=ttySTM0,115200 root=/dev/mmcblk1p3 rootwait rw'
输入saveenv,保存“bootcmd和bootargs”的值
输入boot,启动 Linux 系统
4)、查看运行结果:
mmcblk0: p1
Waiting for root device /dev/mmcblk1p3...
mmc1: new high speed MMC card at address 0001
mmcblk1: mmc1:0001 8GTF4R 7.28 GiB
mmcblk1boot0: mmc1:0001 8GTF4R partition 1 4.00 MiB
mmcblk1boot1: mmc1:0001 8GTF4R partition 2 4.00 MiB
mmcblk1rpmb: mmc1:0001 8GTF4R partition 3 512 KiB, chardev (242:0)
mmcblk1: p1 p2 p3
EXT4-fs (mmcblk1p3): recovery complete
EXT4-fs (mmcblk1p3): mounted filesystem with ordered data mode. Opts: (null)
VFS: Mounted root (ext4 filesystem) on device 179:19.
devtmpfs: mounted
Freeing unused kernel memory: 1024K
Run /sbin/init as init process
Please press Enter to activate this console.
从MMC启动正确;
6、设置从网络启动
设置“bootcmd和bootargs”这两个环境变量,从网络启动linux系统
输入setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp157d-atk.dtb;bootm c2000000 - c4000000',设置从网络启动linux系统
输入“setenv bootargs 'console=ttySTM0,115200 root=/dev/nfs nfsroot=192.168.2.180:/home/zgq/linux/nfs/rootfs,proto=tcp rw ip=192.168.2.178:192.168.2.180:192.168.2.1:255.255.255.0::eth0:off'
回车”
输入: saveenv,保存bootcmd的值
输入: boot,启动 Linux 系统
7、busybox缺点:
1)、构建的根文件系统不完善。比如基本的 lib 库都是我们自己复制交叉编译器的,需要我们自己做很多其他工作。
2)、busybox本身支持的第三方库,软件很少。比如 tslib 就没有,那么就需要我们自己去下载源码,然后编译,移植。第三方依赖问题严重,很难处理。
3)、busybox,因为太简陋,功能少,不适合做项目开发,只适合于学习。
做项目,不适合使用busybox构建根文件系统。
没办法,还要学习其它构建根文件系统的工具。跟着正点原子,走点弯路,不知道他们为什么这么做。也许有好处,人生哪有那么一帆风顺的!!!
相关文章:
Linux第56步_根文件系统第3步_将busybox构建的根文件系统烧录到EMMC
1、第1次将“rootfs”打包 1)、打开第1个终端,准备在“mnt”目录下创建挂载目录“rootfs”; 输入“ls回车” 输入“cd /mnt回车” 输入“ls回车”,查看“mnt”目录下的文件和文件夹 输入“sudo mkdir rootfs回车”,在“mnt”…...
Linux进程间通信(三)-----System V消息队列
消息队列的概念及原理 消息队列实际上就是在系统当中创建了一个队列,队列当中的每个成员都是一个数据块,这些数据块都由类型和信息两部分构成,两个互相通信的进程通过某种方式看到同一个消息队列,这两个进程向对方发数据时&#x…...

Elasticsearch:混合搜索是 GenAI 应用的未来
在这个竞争激烈的人工智能时代,自动化和数据为王。 从庞大的存储库中有效地自动化搜索和检索信息的过程的能力变得至关重要。 随着技术的进步,信息检索方法也在不断进步,从而导致了各种搜索机制的发展。 随着生成式人工智能模型成为吸引力的中…...

态、势、感、知的偏序、全序与无序
在态势感知中,"态"、"势"、"感"和"知"可以被理解为描述不同层次的概念。而在偏序、全序和无序方面,它们可以有不同的关系,简单地说,偏序关系表示部分的可比较性,全序关系表示…...
【从Python基础到深度学习】 8. VIM两种状态
一、安装 sudo apt install vim 二、VIM两种模式 - 命令状态/编辑状态 1.1 进入/退出VIM 进入VIM vim 退出vim :q <enter> 2.2 根目录下添加配置文件 window下创建vimrc类型文件内容如下: set nu set cursorline set hlsearch set tabstop4 使用Wins…...
java微服务面试篇
目录 目录 SpringCloud Spring Cloud 的5大组件 服务注册 Eureka Nacos Eureka和Nacos的对比 负载均衡 负载均衡流程 Ribbon负载均衡策略 自定义负载均衡策略 熔断、降级 服务雪崩 服务降级 服务熔断 服务监控 为什么需要监控 服务监控的组件 skywalking 业务…...

OpenAI 生成视频模型 Sora 论文翻译
系列文章目录 前言 视频生成模型作为世界模拟器 本技术报告的重点是 (1) 将所有类型的视觉数据转换为统一表示,以便对生成模型进行大规模训练的方法,以及 (2) 对索拉的能力和局限性的定性评估。 该报告不包括模型和实现细节。 许多先前的工作使用各种方…...

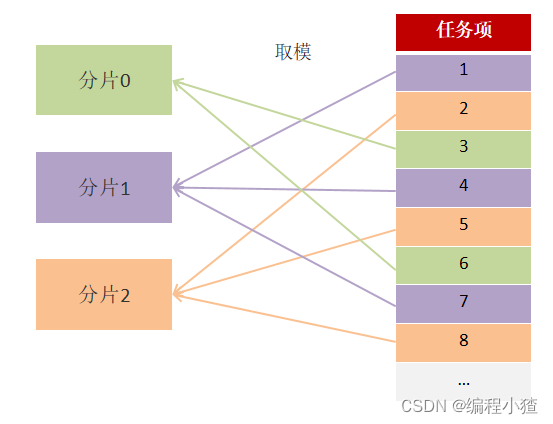
2.13日学习打卡----初学RocketMQ(四)
2.13日学习打卡 目录: 2.13日学习打卡一.RocketMQ之Java ClassDefaultMQProducer类DefaultMQPushConsumer类Message类MessageExt类 二.RocketMQ 消费幂消费过程幂等消费速度慢的处理方式 三.RocketMQ 集群服务集群特点单master模式多master模式多master多Slave模式-…...
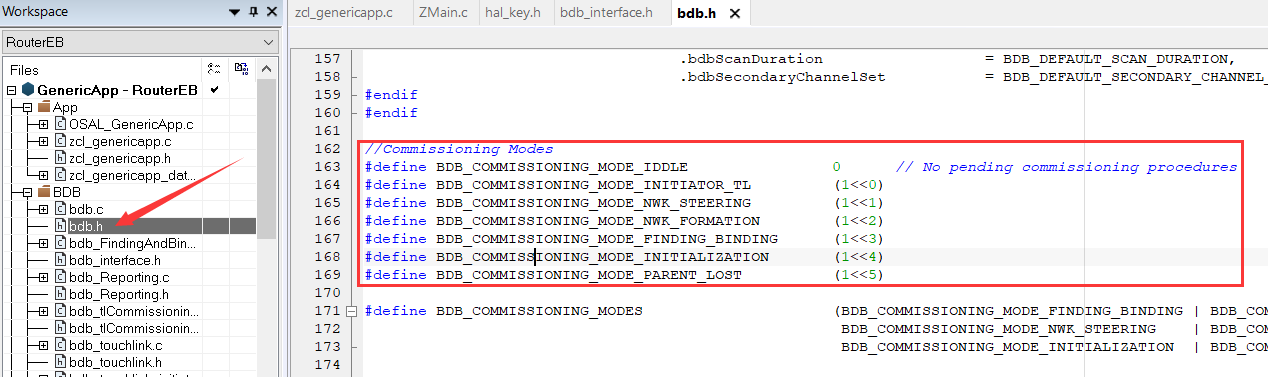
ZigBee学习——BDB
✨本博客参考了善学坊的教程,并总结了在实现过程中遇到的问题。 善学坊官网 文章目录 一、BDB简介二、BDB Commissioning Modes2.1 Network Steering2.2 Network Formation2.3 Finding and Binding(F & B)2.4 Touchlink 三、BDB Commissi…...
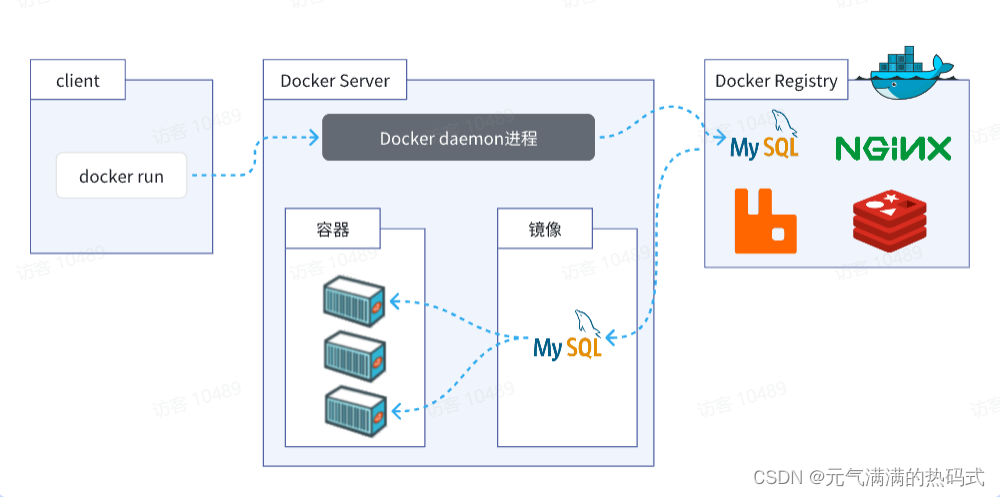
使用Docker快速部署MySQL
部署MySQL 使用Docker安装,仅仅需要一步即可,在命令行输入下面的命令 docker run -d \--name mysql \-p 3306:3306 \-e TZAsia/Shanghai \-e MYSQL_ROOT_PASSWORD123456 \mysql MySQL安装完毕!通过任意客户端工具即可连接到MySQL. 当我们执…...

力扣热题100_滑动窗口_3_无重复字符的最长子串
文章目录 题目链接解题思路解题代码 题目链接 3. 无重复字符的最长子串 给定一个字符串 s ,请你找出其中不含有重复字符的 最长子串 的长度。 示例 1: 输入: s “abcabcbb” 输出: 3 解释: 因为无重复字符的最长子串是 “abc”,所以其长度为 3。 示…...
RM电控工程讲义
HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) 是一个回调函数,通常在STM32的HAL库中用于处理CAN(Controller Area Network)接收FIFO 0中的消息。当CAN接口在FIFO 0中有待处理的消息时,这个函数会被调用。 HAL库C…...
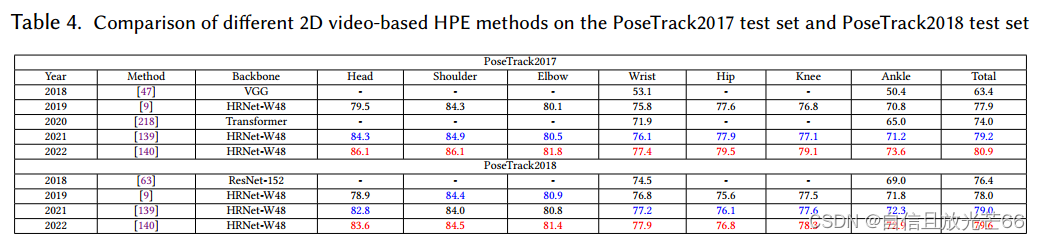
论文阅读:《Deep Learning-Based Human Pose Estimation: A Survey》——Part 1:2D HPE
目录 人体姿态识别概述 论文框架 HPE分类 人体建模模型 二维单人姿态估计 回归方法 目前发展 优化 基于热图的方法 基于CNN的几个网络 利用身体结构信息提供构建HPE网络 视频序列中的人体姿态估计 2D多人姿态识别 方法 自上而下 自下而上 2D HPE 总结 数据集…...

C语言——oj刷题——杨氏矩阵
目录 1. 理解杨氏矩形的特点 2. 实现杨氏矩形查找算法 3. 编写示例代码 当我们谈到杨氏矩形时,我们指的是一种在二维数组中查找目标元素的高效算法。它是由杨氏(Yan Shi)教授提出的,因此得名为杨氏矩形。 杨氏矩形问题的场景是…...

C++ 50道面试题
1. static关键字 1.全局static变量 存储位置:静态存储区,在程序运行期间一直存在 初始化: 未手动初始化的变量自动初始化为0 作用域: 从定义之处开始,到文件结束,仅能在本文件中使用 2.局部static变量…...

寒假学习记录14:JS字符串
目录 查找字符串中的特定元素 String.indexOf() (返回索引值) 截取字符串的一部分 .substring() (不影响原数组)(不允许负值) 截取字符串的一部分 .slice() (不影响原数…...

【数学建模】【2024年】【第40届】【MCM/ICM】【C题 网球运动中的“动量”】【解题思路】
一、题目 (一) 赛题原文 2024 MCM Problem C: Momentum in Tennis In the 2023 Wimbledon Gentlemen’s final, 20-year-old Spanish rising star Carlos Alcaraz defeated 36-year-old Novak Djokovic. The loss was Djokovic’s first at Wimbledon…...
无人驾驶LQR控制算法 c++ 实现
参考博客: (1)LQR的理解与运用 第一期——理解篇 (2)线性二次型调节器(LQR)原理详解 (3)LQR控制基本原理(包括Riccati方程具体推导过程) (4)【基础…...
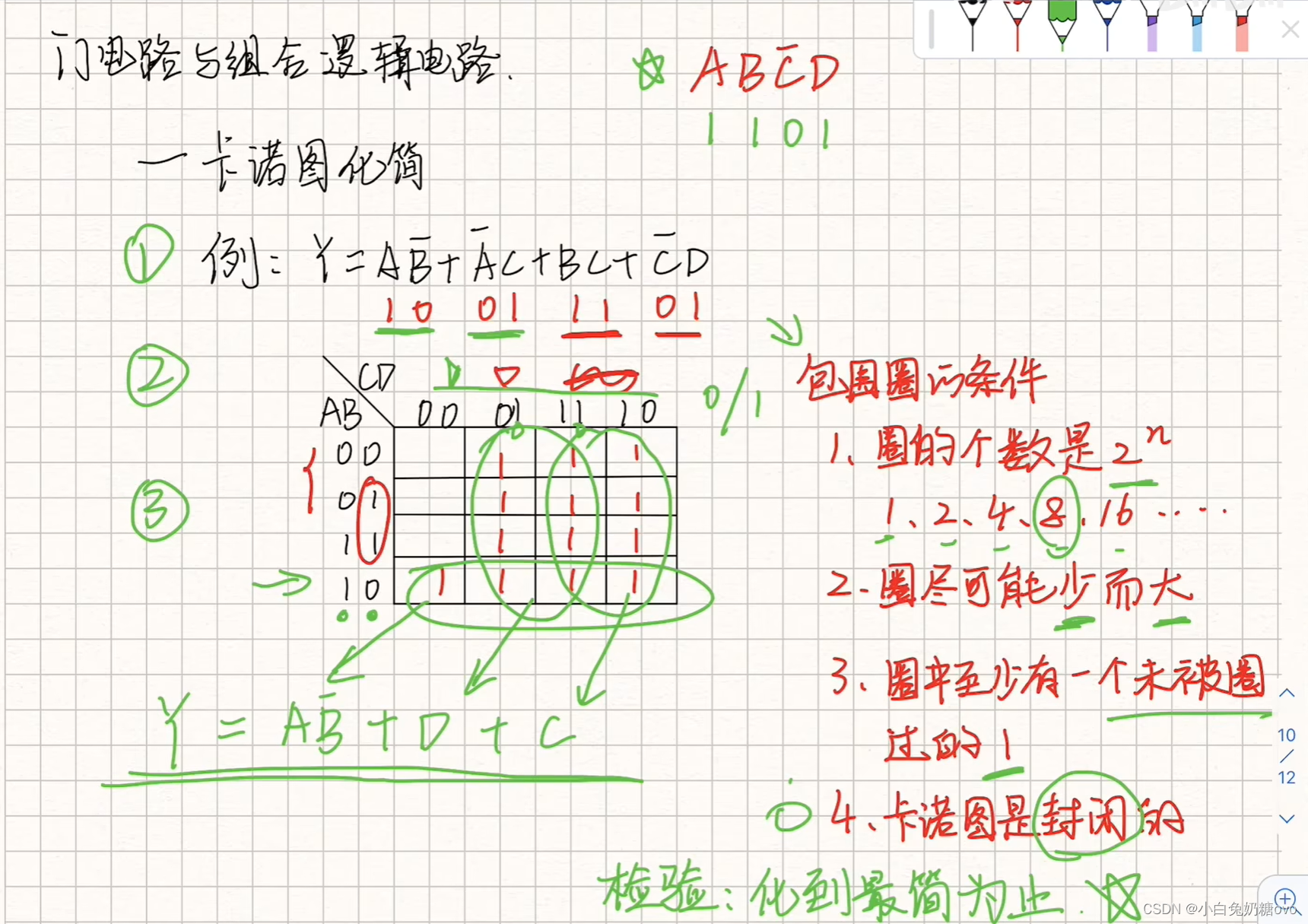
Karnaugh map (卡诺图)
【Leetcode】 289. Game of Life According to Wikipedia’s article: “The Game of Life, also known simply as Life, is a cellular automaton devised by the British mathematician John Horton Conway in 1970.” The board is made up of an m x n grid of cells, wh…...

C# CAD 框选pdf输出
在C#中进行AutoCAD二次开发时,实现框选(窗口选择)实体并输出这些实体到PDF文件通常涉及以下步骤: public ObjectIdCollection GetSelectedEntities() {using (var acTrans HostApplicationServices.WorkingDatabase.Transaction…...

5秒无损转换B站缓存视频:m4s-converter完整使用指南
5秒无损转换B站缓存视频:m4s-converter完整使用指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经在B站缓存了珍贵的学习…...

智能路由器项目解析:基于策略路由实现多线路流量智能调度
1. 项目概述:一个“聪明”的路由器能做什么?最近在GitHub上看到一个挺有意思的项目,叫smart-router,作者是c0nSpIc0uS7uRk3r。光看名字,你可能会觉得这又是一个关于家庭网络优化的工具,但点进去仔细研究后&…...

Ruby专属LLM应用框架ruby_llm:从基础集成到生产部署实战
1. 项目概述:一个为Ruby语言量身打造的LLM应用框架如果你是一名Ruby开发者,最近被各种大语言模型(LLM)的应用搞得心痒痒,但看着满世界的Python库和框架感到无从下手,那么crmne/ruby_llm这个项目可能就是你在…...

AI Agent架构深度解析:从核心原理到工程实践
1. 项目概述:一次关于AI Agent的深度技术探险最近在GitHub上看到一个名为“tvytlx/ai-agent-deep-dive”的项目,光看标题就让人眼前一亮。这显然不是一个简单的“Hello World”式教程,而是一次对AI Agent(智能体)技术的…...

gnamiblast-skill:基于技能化与管道化的智能文本处理工具解析
1. 项目概述与核心价值最近在GitHub上闲逛,又发现了一个挺有意思的项目,叫gabrivardqc123/gnamiblast-skill。光看这个名字,可能有点摸不着头脑,gnamiblast听起来像是个自造词,skill又指向了某种技能或功能。作为一名常…...
基于Particle Photon与NeoPixel的物联网徽章:实时追踪ISS空间站
1. 项目概述:一个会“感知”太空的智能徽章 如果你和我一样,对头顶那片星空充满好奇,特别是当得知国际空间站(ISS)这个重达数百吨的大家伙,其实每天都会数次悄无声息地掠过我们的城市上空时,总…...

FPGA微振动视频欧拉放大测量【附程序】
✨ 长期致力于微振动测量、欧拉视频放大、频率估计、Gabor、FPGA研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)改进线性欧拉视频放大算法的FPGA流水…...

555时基电路:从内部原理到三大经典应用模式全解析
1. 从“黑盒子”到“瑞士军刀”:初识555时基电路如果你刚开始接触电子设计,或者玩过一些简单的单片机项目,可能会觉得产生一个精确的延时、一个稳定的方波信号,或者把一个不规则的波形“修整”得漂漂亮亮,是一件需要写…...
HSTracker:macOS平台炉石传说智能数据分析与决策辅助系统
HSTracker:macOS平台炉石传说智能数据分析与决策辅助系统 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker HSTracker是一款专为macOS平台设计的炉石传说智能套…...

ITK-SNAP医学图像分割:从临床需求到精准分析的完整指南
ITK-SNAP医学图像分割:从临床需求到精准分析的完整指南 【免费下载链接】itksnap ITK-SNAP medical image segmentation tool 项目地址: https://gitcode.com/gh_mirrors/it/itksnap 面对复杂的医学影像数据,你是否曾为如何准确提取关键解剖结构而…...