遨博I20协作臂关节逆解组Matlab可视化
AUBO I20协作臂关节逆解组Matlab可视化
- 前言
- 1、RTB使用注意点
- 2、代码与效果
- 2.1、完整代码
- 2.2、运行效果
- 总结
前言
注意:请预先配置好Matlab和RTB机器人工具箱环境,本文使用matlab2022b和RTB10.04版本
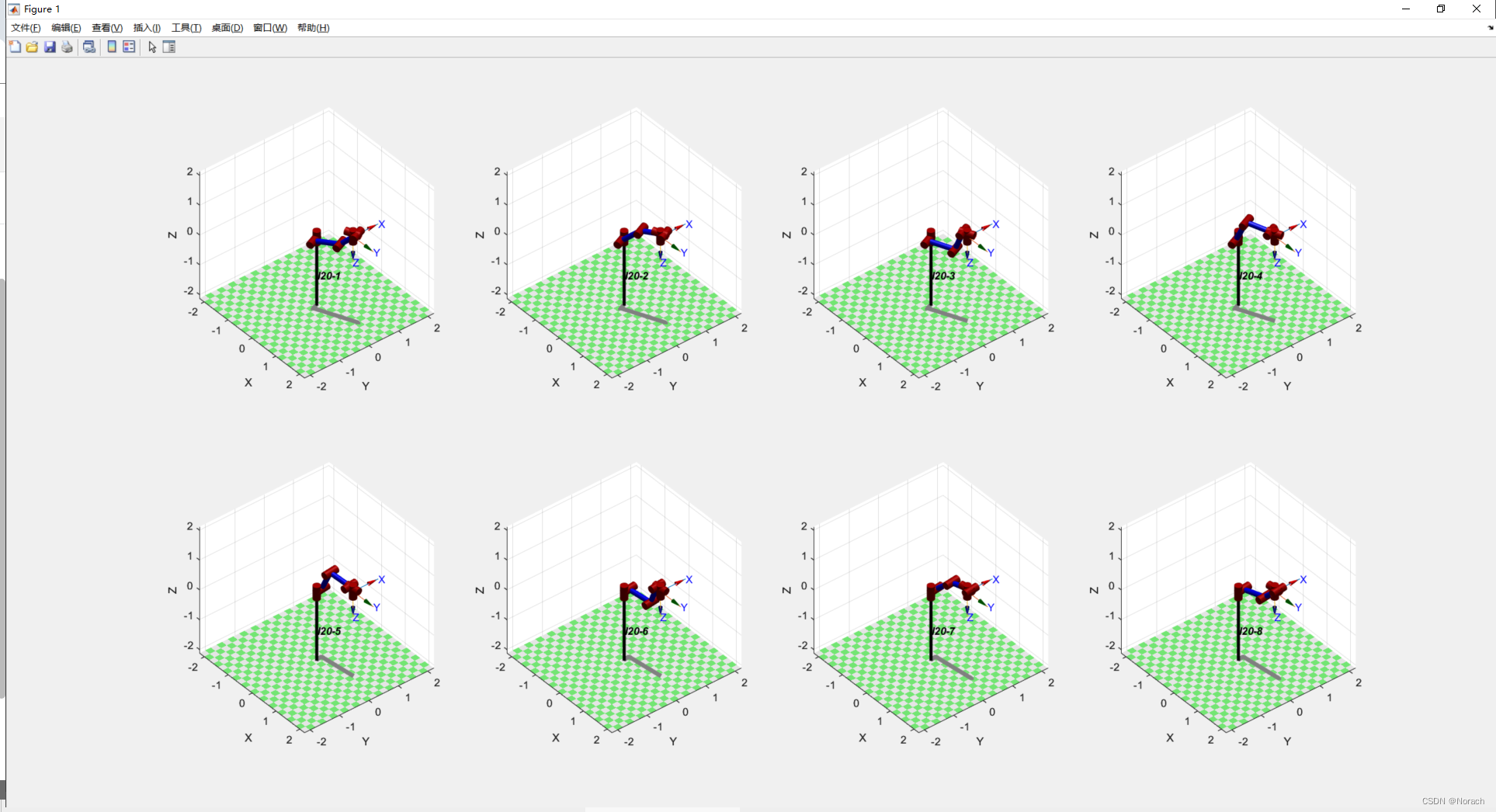
工作需要,使用matlab实现对六轴机械臂的逆解八组解数据可视化。本文针对遨博AUBO I20型号的协作臂进行处理。
提示:以下是本篇文章正文内容,下面案例可供参考
1、RTB使用注意点
当图形需要显示多个机器人或者多个不同关节角时,每个plot都需要一个唯一的名称,否则,只会显示同名的最新一组调用plot的关节角。例如,现在针对同一个DH参数的臂型,有两组关节角希望显示出来,那么应该这么写才正确:
joints_type1 = [a1 b1 c1 d1 e1 f1];
joints_type2 = [a2 b2 c2 d2 e2 f2];% robot1和robot2调用SerialLink创建时使用用一组DH参数L
% 'name'参数需要不同,作为区分。
robot1.plot(joints_type1);
hold on;
robot2.plot(joints_type2);
如果使用错误的写法,自始至终只有一个robot变量,即:
joints_type1 = [a1 b1 c1 d1 e1 f1];
joints_type2 = [a2 b2 c2 d2 e2 f2];robot1.plot(joints_type1);
hold on;
robot1.plot(joints_type2);
最终的效果,可以看到两个plot都是joints_type2的数据,即便是已经使用了hold on,这个问题和RTB的内部plot函数实现逻辑有关联;
2、代码与效果
2.1、完整代码
代码如下:
clear;
clc;
warning off% 定义连杆的DH参数
% theta d a alpha sigma offset
L(1) = Link([ 0 0.1855 0 0 0 pi ],'modified');
L(2) = Link([ 0 0.177 0 -pi/2 0 -pi/2 ],'modified');
L(3) = Link([ 0 0 0.803 pi 0 0 ],'modified');
L(4) = Link([ 0 0 0.72 pi 0 -pi/2 ],'modified');
L(5) = Link([ 0 0.127 0 -pi/2 0 0 ],'modified');
L(6) = Link([ 0 0.1063 0 pi/2 0 0 ],'modified');% 限制转动角度
L(1).qlim=[-359,359]/180*pi;
L(2).qlim=[-174,174]/180*pi;
L(3).qlim=[-174,174]/180*pi;
L(4).qlim=[-174,174]/180*pi;
L(5).qlim=[-174,174]/180*pi;
L(6).qlim=[-359,359]/180*pi;aubo_robots = struct();
aubo_robots_num = 8;
robot_name_prefix = 'I20-';% 创建机器人模型
for i = 1 : aubo_robots_numaubo_robots.(sprintf('robot%d', i)) = SerialLink(L, 'name', [robot_name_prefix, num2str(i)]);aubo_robots.(sprintf('robot%d', i)).base = transl(0, 0, 0);% 可选:显示D-H参数% aubo_robots.(sprintf('robot%d', i)).display();
end% 逆解组的八组关节角
joints = struct();
joints.type1 = [0.412302 -1.365035 -0.573020 2.362811 -1.570796 -2.729291];
joints.type2 = [0.412302 -0.824124 0.573020 2.967940 -1.570796 -2.729291];
joints.type3 = [0.412302 -1.581334 -1.239168 -1.228631 1.570796 0.412302];
joints.type4 = [0.412302 -0.419871 1.239168 0.088243 1.570796 0.412302];
joints.type5 = [-3.029190 0.419871 -1.239168 -0.088243 -1.570796 0.112402];
joints.type6 = [-3.029190 1.581334 1.239168 1.228631 -1.570796 0.112402];
joints.type7 = [-3.029190 0.824124 -0.573020 -2.967940 1.570796 -3.029190];
joints.type8 = [-3.029190 1.365035 0.573020 -2.362811 1.570796 -3.029190];% 分为二行四列的子图显示
for i = 1:aubo_robots_numrow = ceil(i / 4) - 1;col = mod(i - 1, 4) + 1;subplot(2, 4, row * 4 + col);aubo_robots.(sprintf('robot%d', i)).plot(joints.(sprintf('type%d', i)), 'view', [51, 38]);hold on;
end
hold off;
grid on;
2.2、运行效果
运行效果截图:
总结
八组解可视化,可以看出对应 左/右手位 * 肘关节高/低于髋关节 * 腕关节是否翻转。想起高中时数学老师常说的一个词 数形结合 ,可视化确实方便了不少对数据的分析。
相关文章:
遨博I20协作臂关节逆解组Matlab可视化
AUBO I20协作臂关节逆解组Matlab可视化 前言1、RTB使用注意点2、代码与效果2.1、完整代码2.2、运行效果 总结 前言 注意:请预先配置好Matlab和RTB机器人工具箱环境,本文使用matlab2022b和RTB10.04版本 工作需要,使用matlab实现对六轴机械臂…...
力扣题目训练(15)
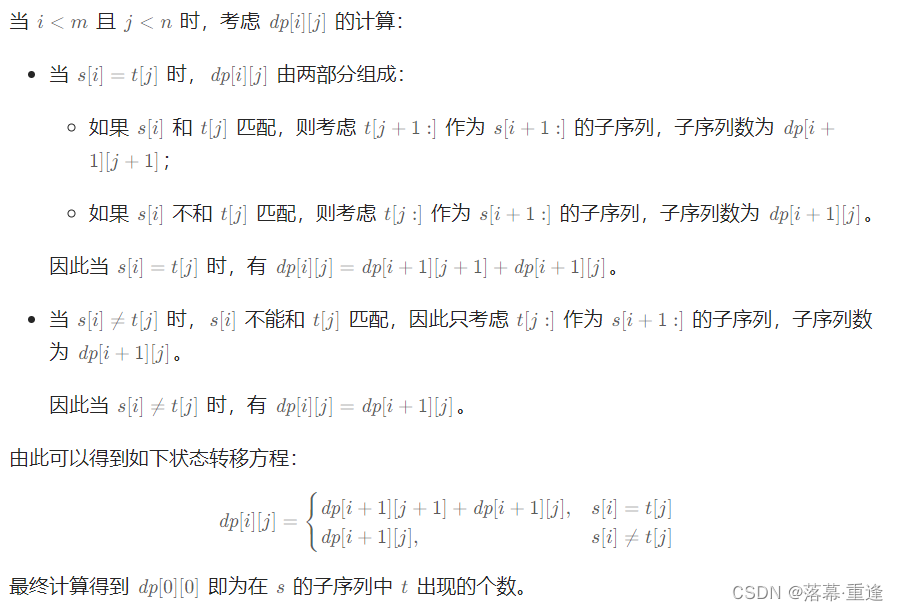
2024年2月8日力扣题目训练 2024年2月8日力扣题目训练507. 完美数520. 检测大写字母521. 最长特殊序列 Ⅰ221. 最大正方形237. 删除链表中的节点115. 不同的子序列 2024年2月8日力扣题目训练 2024年2月8日第十五天编程训练,今天主要是进行一些题训练,包括…...

PCB差模辐射是如何产生的
在电路应用中,高频时钟信号往往会采用差分线传输模式,其优点是在提高速率的同时减小功耗和提高抗扰度,因此,差模辐射就成为电路正常工作的结果,是电流流过导体形成的环路所产生,差模辐射模型可以被模拟为一个小环形天线,对于一个面积为A的小环路,载有电流Idm,在远场中…...
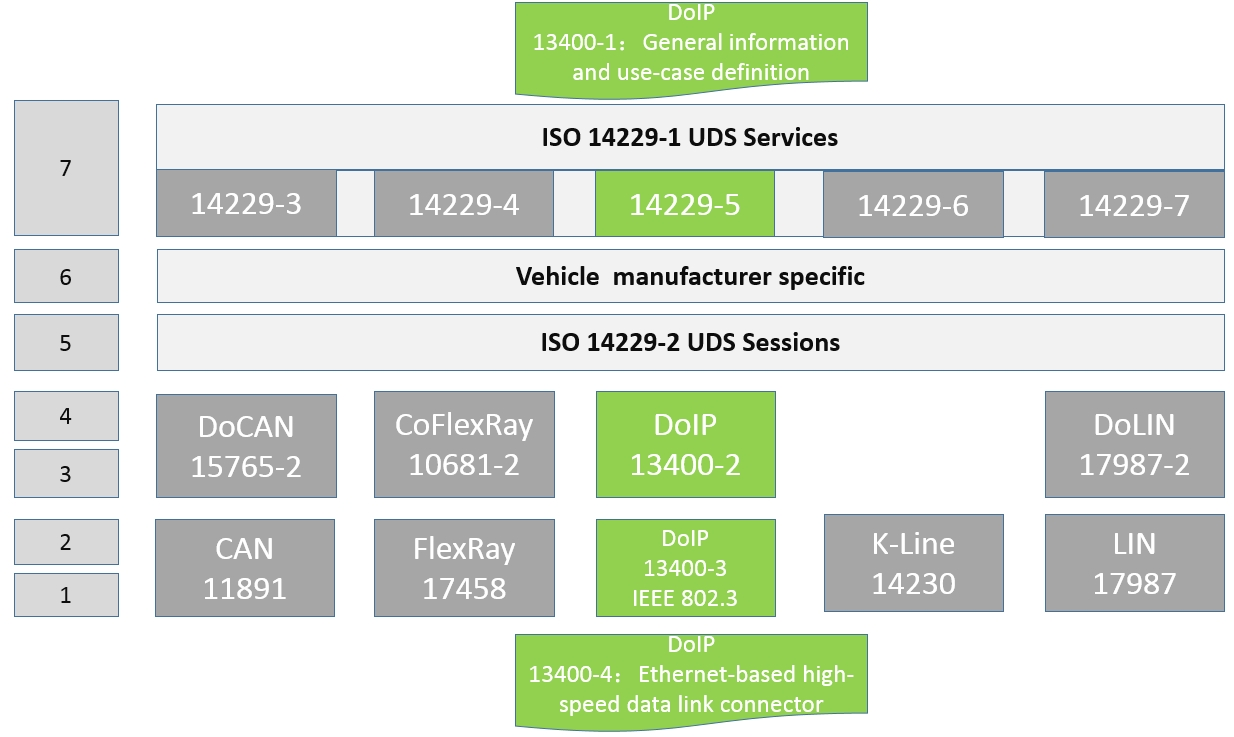
车载诊断协议DoIP系列 —— 协议中术语解释和定义
车载诊断协议DoIP系列 —— 协议中术语解释和定义 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师(Wechat:gongkenan2013)。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 本就是小人物,输了就是输了,不要在意别人怎么看自己。江湖一碗茶,…...

【退役之重学前端】关于在控制台得到undefined的事
在浏览器控制台中,undefined 会时不时地,在我不想看到的地方出现。如果你遇到相同的问题,在这篇博客中你会得到答案。 先来看代码块 function test(){} test()//undefined再看下一个代码块 function test(){return 1; } test()//1再来看一个…...

指数和估计六大问题
1955年英国著名数学家R.A.Rankin在牛津大学出版的数学刊物Quart.J.Math.发表了论文(现 FRS D.R.Heath-Brown为主编),专门讲van der Corput方法产生的指数对理论(1933年E.Phillips提出的精彩理论,好友曲阜师范大学毕业中…...

【软件相关】基于Alist挂载云盘到本地文件资源管理器
文章目录 0 前言1 Alist挂载云盘2 RaiDrive配置3 rclone配置 0 前言 因为最近在研究各种云盘存储影视资源的方法,无意间看到一个教程是利用软件将云盘挂载到本地的资源管理器,这样就能实现类似本地文件操作的方式来操作云盘文件,还是有点意思…...

Java多线程系列——锁
0.引言 在并发编程中,锁是一种重要的同步机制,用于控制对共享资源的访问。Java 提供了多种锁的实现,每种锁都有不同的特性和适用场景。本文将深入介绍 Java 中常见的锁类型,包括内置锁、显式锁、读写锁等,并讨论它们的…...
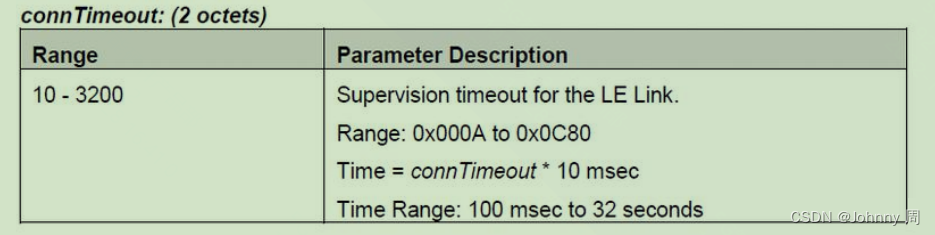
蓝牙BLE学习-GAP
1.概述 GAP层(Generic access profile-通用访问配置文件)。GAP是对LL层payload(有效数据包)如何进行解析的两种方式的一种,而且也是最简单的一种。GAP简单的对LL payload进行一些规范和定义,因此GAP能实现的…...
, 贪心算法2)
算法训练营day28(补), 贪心算法2
//122. 买卖股票的最佳时机 II func maxProfit(prices []int) int { result : 0 //利润总和 for i : 1; i < len(prices); i { if prices[i]-prices[i-1] > 0 { result result (prices[i] - prices[i-1]) } } return result } //55. 跳跃游戏 func canJump(nums []…...
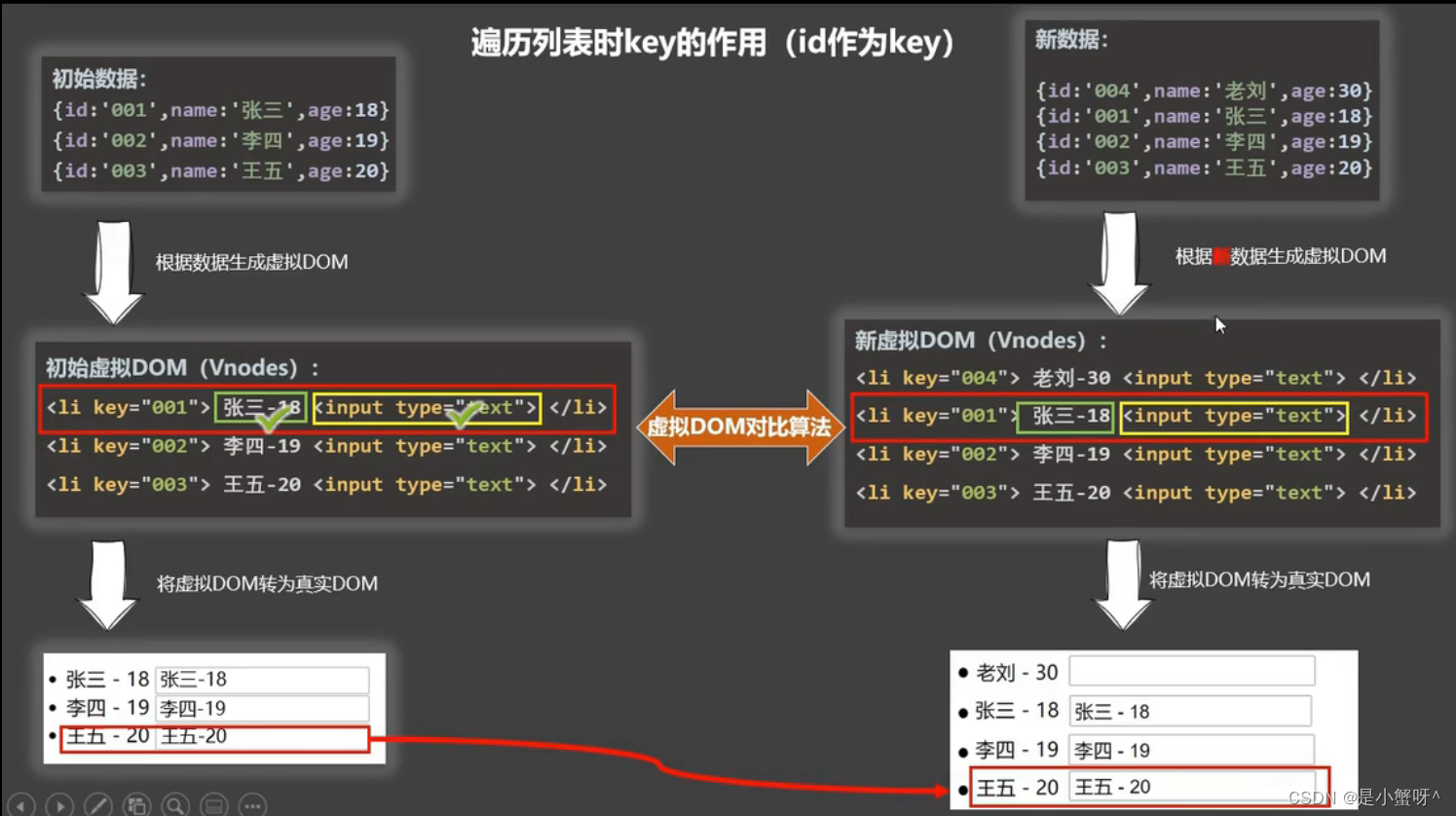
Vue核心基础4:绑定样式、条件渲染、列表渲染
1 绑定样式 【代码】 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>绑定样式</title><s…...

go-zero读取mysql部分字段
读取部分字段,使用函数 QueryRowPartialCtx 。 假设有如下一张表: CREATE TABLE test (id INT UNSIGNED NOT NULL AUTO_INCREMENT PRIMARY KEY, ctime DATETIME);要读取字段 ctime 值。 定义一结构体: type X struct {state int db:"…...
反转一个单链表
反转一个单链表 题意:反转一个单链表。 示例: 输入: 1->2->3->4->5->NULL 输出: 5->4->3->2->1->NULL 思路 需要虚拟节点么? 答:不需要,因为没有删除节点,只是改变了节点的指向。 遍…...
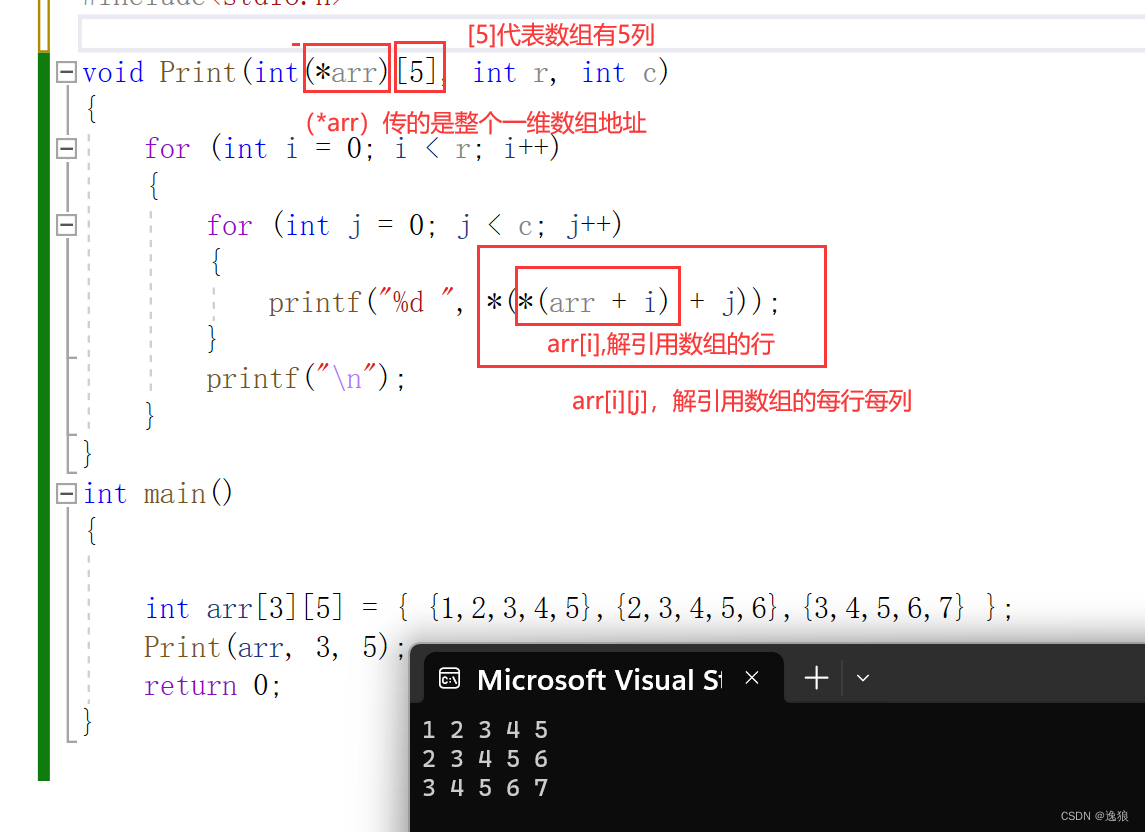
拿捏c语言指针(中)
前言 书接上回 拿捏c语言指针(上) 此篇主要讲解的是指针与数组之间的爱恨情仇,跟着我的脚步一起来看看吧~ 创造不易,可以帮忙点点赞吗 如有差错,欢迎指出 理解数组名 数组名是首元素地址 例外 1.sizeof࿰…...

鸿蒙语言ArkTS(更好的生产力与性能)
ArkTS是鸿蒙生态的应用开发语言 ArkTS提供了声明式UI范式、状态管理支持等相应的能力,让开发者可以以更简洁、更自然的方式开发应用。 同时,它在保持TypeScript(简称TS)基本语法风格的基础上,进一步通过规范强化静态检…...
VBA技术资料MF120:打印固定标题行列
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。“VBA语言専攻”提供的教程一共九套,分为初级、中级、高级三大部分,教程是对VBA的系统讲解&#…...

MongoDB聚合运算符:$add
$add运算符将将数字相加或将数字和日期相加。如果参数之一是日期,则 $add会将其他参数视为毫秒,并添加到日期中。 语法 { $add: [ <expression1>, <expression2>, ... ] }参数可以是任何有效的表达式,只要能否解析为数值或日期…...

《剑指Offer》笔记题解思路技巧优化 Java版本——新版leetcode_Part_4
《剑指Offer》笔记&题解&思路&技巧&优化_Part_4 😍😍😍 相知🙌🙌🙌 相识😢😢😢 开始刷题1. LCR 148. 验证图书取出顺序——栈的压入、弹出序列2. LCR 14…...
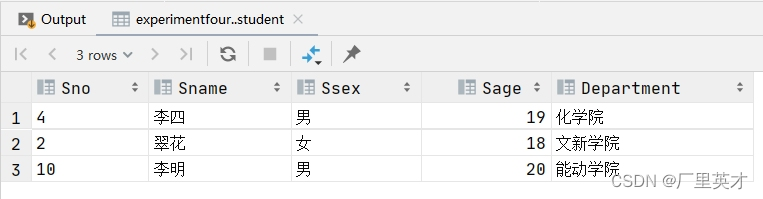
数据库第四次实验
目录 1.建立数据表并插入数据 2 视图的创建 2.1 行列子集视图的创建 2.2 多表视图 2.3视图上建立视图 2.4分组视图 2.5带表达式的视图 3 删除视图 4 查询视图 5 更新视图 5.1 修改某一个属性 5.2 删除一条数据 5.3 插入…...
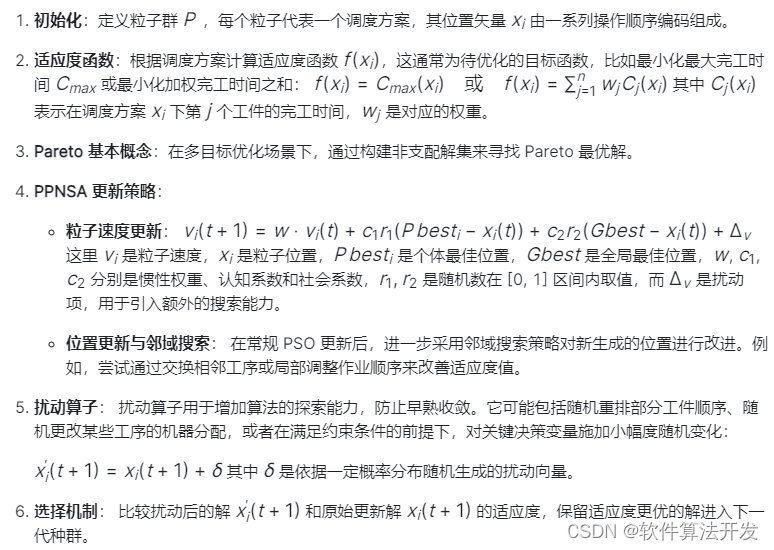
基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 基于PPNSA扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图和优化收敛曲线。 2.测试软件版本以及运行结果展示 MATLAB2022a版本运行…...
)
别再手动复制粘贴了!用poi-tl + Spring Boot自动生成带表格、二维码的Word领料单(附完整源码)
基于poi-tl的Spring Boot领料单自动化生成实战指南 在企业日常运营中,领料单这类标准化文档的生成往往占据大量重复性工作时间。传统的手工复制粘贴不仅效率低下,还容易出错。本文将介绍如何利用poi-tl这一强大的Word模板引擎,结合Spring Bo…...
,搞懂设备插上后到底经历了什么)
别再只盯着USB3.0速度了!深入链路训练状态机(LTSSM),搞懂设备插上后到底经历了什么
USB3.0链路训练状态机:从插入到识别的技术全景解析 当我们将一个USB3.0设备插入电脑时,那个短暂的"识别"过程背后,隐藏着一套精密的数字握手协议。这个看似简单的动作,实际上触发了物理层到协议层的多阶段协同工作&…...

Perplexity实时新闻查询效率翻倍:从API调用到结果过滤的7个隐藏技巧
更多请点击: https://codechina.net 第一章:Perplexity实时新闻查询效率翻倍:从API调用到结果过滤的7个隐藏技巧 Perplexity 的实时新闻 API(如 /search/news 端点)在默认配置下常因冗余字段、未压缩响应和同步阻塞而…...

专业级LaTeX排版:深度解析中国科学技术大学学位论文模板括号使用的最佳实践
专业级LaTeX排版:深度解析中国科学技术大学学位论文模板括号使用的最佳实践 【免费下载链接】ustcthesis LaTeX template for USTC thesis 项目地址: https://gitcode.com/gh_mirrors/us/ustcthesis 在学术论文写作中,细节决定专业水准。中国科学…...

JiYuTrainer高效实用指南:3步解锁极域电子教室控制,恢复电脑操作自由
JiYuTrainer高效实用指南:3步解锁极域电子教室控制,恢复电脑操作自由 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer 还在为课堂上被老师全屏控制电脑而烦…...

QT 5.14.2 编译调试踩坑实录:从‘file not found’到‘Illegal byte sequence’的保姆级排错指南
QT 5.14.2 编译调试实战:从文件缺失到编码陷阱的深度排错手册 接手一个遗留的QT串口通信项目时,本以为只是简单的代码移植,却在QT 5.14.2环境下遭遇了三个典型的"拦路虎":神秘的库文件失踪、程序突然崩溃的灵异事件&…...

智能车视觉巡线:从图像处理到PID控制的嵌入式实战解析
1. 项目概述:一场关于速度与精度的极限挑战十多年前,当飞思卡尔(Freescale)智能车竞赛还是校园里最硬核的科技赛事之一时,摄像头组的较量无疑是皇冠上的明珠。它不像光电组依赖地面反射,也不像电磁组追寻导…...

1951-2025年中国1km月平均气温逐年年内季节波动幅度数据集
中国1000米分辨率月平均气温数据集(1951-2025)提供了长时间序列、规则网格的气象背景信息,为开展气候变化分析和区域比较研究提供了基础数据支撑。针对原始月尺度序列直接使用不够便捷的问题,需要进一步形成具有明确主题和统一格式…...
)
Perplexity Pro高阶用法深度解密:结合Obsidian/Notion实现知识自动蒸馏的完整链路(含可复用JSON Schema)
更多请点击: https://intelliparadigm.com 第一章:Perplexity Pro高阶用法深度解密:结合Obsidian/Notion实现知识自动蒸馏的完整链路(含可复用JSON Schema) Perplexity Pro 的 API 提供了结构化响应能力,配…...

Godot-MCP终极指南:如何用AI助手5倍提升Godot游戏开发效率
Godot-MCP终极指南:如何用AI助手5倍提升Godot游戏开发效率 【免费下载链接】Godot-MCP An MCP for Godot that lets you create and edit games in the Godot game engine with tools like Claude 项目地址: https://gitcode.com/gh_mirrors/god/Godot-MCP 在…...