Unity所有关于旋转的方法详解
前言:欧拉角和四元数的简单描述
我们在Inspector面板上看到的rotation其实是欧拉角,
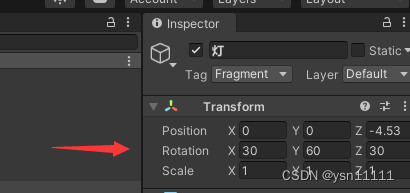
我们将Inspector面板设置成Debug模式,此时看到的local Rotation才是四元数。

Unity中的欧拉旋转是按照Z-X-Y顺规执行的旋转,一组欧拉旋转过程中,相对的轴向不会发生变化。 Transform.Rotate(new Vector3(30,60,30)),它代表执行了一组欧拉旋转,它相对的是旋转前的局部坐标朝向。正是这种顺规和轴向的定义,导致了万向节死锁的自然形成。
举个例子就是,在世界空间下,按照X-Y-Z去拖拽旋转轴,当拖拽到Z轴旋转时,X和Y轴的欧拉角都会改变,如果按照Z-X-Y去按顺序拖拽则轴与轴之间的数值不会影响。
代码表示:方式1和方式3的旋转结果相同
//方式一
transform.Rotate(30,60,30,Space.World);//方式二(X-Y-Z)
transform.Rotate(30,0,0,Space.World);
transform.Rotate(0,60,0,Space.World);
transform.Rotate(0,0,30,Space.World);//方式三(Z-X-Y)
transform.Rotate(0,0,30,Space.World);
transform.Rotate(30,0,0,Space.World);
transform.Rotate(0,60,0,Space.World);欧拉角和四元数的相互转换:
// 欧拉角表示旋转
Vector3 eulerRotation = new Vector3(30f, 60f, 30f);
// 将欧拉角转换为四元数
Quaternion quaternionRotation = Quaternion.Euler(eulerRotation);
// 将四元数转换为欧拉角
Vector3 convertedEulerAngles = quaternionRotation.eulerAngles;局部坐标系和世界坐标系的转换:
transform.up = transform.rotation * Vector3.up;
transform.right = transform.rotation * Vector3.right;
transform.forward = transform.rotation * Vector3.forward;1.Transform旋转系列
(1)transform.Rotate(有万向锁)
public void Rotate (Vector3 eulers, Space relativeTo= Space.Self);
public void Rotate (float xAngle, float yAngle, float zAngle, Space relativeTo= Space.Self);
描述:这两种方式的旋转结果相同,应用一个围绕 Z 轴旋转 zAngle 度、围绕 X 轴旋转 xAngle度、围绕 Y 轴旋转 yAngle 度(按此顺序)的旋转。Space.Self代表局部坐标系,Space.World代表世界坐标系。
public void Rotate (Vector3 axis, float angle, Space relativeTo= Space.Self);
描述:用给定角度定义的度数围绕给定轴旋转该对象。
我们可以看个这样的例子:
transform.Rotate(Vector3.up, 30, Space.Self);
transform.Rotate(transform.up, 30, Space.World);这两种旋转方式的结果是一致的。
(2)transform.RotateAround(有万向锁)
public void RotateAround (Vector3 axis, float angle);
public void RotateAround (Vector3 point, Vector3 axis, float angle);
描述:第一个参数为围绕的中心点,第二个参数为物体围绕转动的轴,方式1和方式2的区别在于,方式1围绕的中心点就是自己。
transform.RotateAround和transform.Rotate的区别就好比地球公转和自转的区别。
(3)transform.LookAt(无万向锁)
public void LookAt (Transform target, Vector3 worldUp= Vector3.up);
public void LookAt (Vector3 worldPosition, Vector3 worldUp= Vector3.up);
描述:旋转变换,使向前矢量指向 target 的当前位置。

主要是这句话的理解:
“随后它会旋转变换以将其向上方向矢量指向 worldUp 矢量暗示的方向。 如果省略 worldUp 参数,则该函数会使用世界空间 y 轴。如果向前方向垂直于 worldUp,则旋转的向上矢量将仅匹配 worldUp 矢量。”
什么意思呢,就是LookAt的第一个参数决定了forward轴(蓝轴)的朝向,但是怎么旋转到目标位置还需要再确定一个轴,但是第二个参数并不等价于up轴(绿轴)指向worldUp,只是在保证forward轴(蓝轴)指向物体时,会尽量保证在旋转的过程中,up轴指向worldUp大致的方向,且不管怎么旋转up轴和worldUp夹角都不会超过90°。
2.Quaternion旋转系列(无万向锁)
创建旋转:
(1)Quaternion.LookRotation
public Quaternion LookRotation (Vector3 forward, Vector3 upwards= Vector3.up);
描述:物体的Z 轴指向forward,X 轴指向 forward 和 upwards 的差积,Y 轴指向 Z 和 X 之间的差积对齐。确定轴的顺序是Z-X-Y的顺序。
与LookAt的区别:
LookAt()与LookRotation()的参数都相似,但前者是将游戏对象的z轴指向参数所表示的那个点,而后者是将游戏对象的z轴指向参数所表示的向量的方向。
transform.LookAt(targetCube.transform);
transform.rotation = Quaternion.LookRotation(targetCube.transform.position-transform.position);这两行代码的效果是等价的。

(2)Quaternion.FromToRotation
public static Quaternion FromToRotation (Vector3 fromDirection, Vector3 toDirection);
描述:创建一个从 fromDirection 旋转到 toDirection 的旋转。
通常情况下,您使用该方法对变换进行旋转,使其的一个轴(例如 Y 轴)跟随世界空间中的目标方向 /toDirection/。
效果等价于Quaternion.SetFromToRotation
(3)Quaternion.AngleAxis
public static Quaternion AngleAxis (float angle, Vector3 axis);
描述:创建一个围绕 axis 旋转 angle 度的旋转。
下面是实现绕着世界Y轴自转的小案例
private void Update(){transform.rotation=Quaternion.AngleAxis(Time.deltaTime*60,Vector3.up);}效果预览:

操作旋转:
(4)Quaternion.Slerp
public static Quaternion Slerp (Quaternion a, Quaternion b, float t);
描述:在四元数 a 与 b 之间按比率 t 进行球形插值。参数 t 限制在范围 [0, 1] 内。
(5)Quaternion.RotateTowards
public static Quaternion RotateTowards (Quaternion from, Quaternion to, float maxDegreesDelta);
描述:将 from 四元数朝 to 旋转 maxDegreesDelta 的角度步长(但请注意, 该旋转不会过冲)。 如果 maxDegreesDelta 为负值,则向远离 to 的方向旋转,直到旋转 恰好为相反的方向。
与Quaternion.FromToRotation的区别:
RotateTowards是操作旋转,就是一点点的把from插值到to。而FromToRotation它代表的是一个完整的旋转过程,你需要提供一个起始旋转和目标旋转,方法将返回一个表示从起始方向到目标方向的旋转。
3.刚体旋转系列
(1)Rigidbody.MoveRotation
public void MoveRotation (Quaternion rot);
刚体插值在渲染的任意中间帧中的两个旋转之间平滑过渡,方法必须写在FixedUpdate,参数是四元数。相比于其他所有的旋转方式,他可以实现带动在平台上的物体一起旋转。

实现带动效果:旋转物的刚体必须要勾选isKinematic,切记。
代码如下:
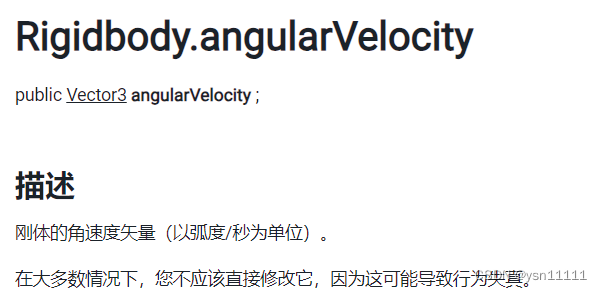
public float speed;private float angle;private Rigidbody rb;private void Start(){rb = GetComponent<Rigidbody>();}private void FixedUpdate(){angle = Time.fixedDeltaTime * speed;rb.MoveRotation(rb.rotation*Quaternion.Euler(Vector3.up*angle));}(2)Rigidbody角速度angularVelocity
描述:表示刚体的角速度,即物体绕其自身轴旋转的速度。它是一个三维矢量,每个分量分别表示绕相应轴的旋转速度。
private void Update(){//绕y轴匀速运动rb.angularVelocity = new Vector3(0, 3, 0);}
它也可以带动平台上的物体一起跟着旋转。

使用角速度需要注意的是,不能勾选isKinematic。
官方说不建议直接修改angularVelocity,会造成失真。但我没遇到过什么问题,我的理解是直接修改内部属性不太符合编程习惯,会破坏完整性。
参考链接:学习笔记3 - 简书
相关文章:
Unity所有关于旋转的方法详解
前言:欧拉角和四元数的简单描述 我们在Inspector面板上看到的rotation其实是欧拉角, 我们将Inspector面板设置成Debug模式,此时看到的local Rotation才是四元数。 Unity中的欧拉旋转是按照Z-X-Y顺规执行的旋转,一组欧拉旋转过程中…...

Vue3
目录 一、 Vue3简介 1. 性能的提升 2. 源码的升级 3. 拥抱TypeScript 4. 新的特性 二、 创建Vue3工程 1. 基于 vue-cli 创建 2. 基于 vite 创建(推荐) 3. 一个简单的效果 三、Vue3核心语法 1. OptionsAPI 与 CompositionAPI (1)Options API …...
浅谈业务场景中缓存的使用
浅谈缓存 一、背景二、缓存分类1.本地缓存2.分布式缓存 三、缓存读写模式1.读请求2.写请求 四、缓存穿透1.缓存空对象2.请求校验3.请求来源限制4.布隆过滤器 五、缓存击穿1.改变过期时间2.串行访问数据库 六、缓存雪崩1.避免集中过期2.提前更新缓存 七、缓存与数据库一致性1.设…...
Itext生成pdf文件,html转pdf时中文一直显示不出来
之前使用freemark模板渲染ftl页面,转出的pdf中,css2有些样式好像不支持,比较常用的居中样式都没有效果,text-align:center 改造成使用html页面来转pdf,css2的样式可以生效,itext是不支持css3的弹性布局的ITextRenderer pdfRendere…...

题目 1138: C语言训练-求矩阵的两对角线上的元素之和
问题描述: 求矩阵的两对角线上的元素之和 样例输入: 3 1 2 3 4 5 6 7 8 9 样例输出: 25 问题分析: 因为奇数阶矩阵的主对角线和副对角线上的元素有重复,偶数阶矩阵的主对角线和副对角线上的元素无重复&#x…...
第6讲自定义icon实现
自定义icon实现 component下新建SvgIcon目录,再新建index.vue 定义svg-icon组件 <template><svg class"svg-icon" aria-hidden"true"><use :xlink:href"iconName"></use></svg> </template>&…...

花费200元,我用全志H616和雪糕棒手搓了一台可UI交互的视觉循迹小车
常见的视觉循迹小车都具备有路径识别、轨迹跟踪、转向避障、自主决策等基本功能,如果不采用红外避障的方案,那么想要完全满足以上这些功能,摄像头、电机、传感器这类关键部件缺一不可,由此一来小车成本也就难以控制了。 但如果&a…...

AUTOSAR OS TASK
什么是TASK? 我们在裸机中跑代码,程序永远只能单活动流水执行,当程序需要等待的时候,CPU就一直在waiting状态,无法高效的利用CPU,这个时候就引入了并发运行需求。一个系统能同时执行多个不同活动的系统叫做并发系统。其中这个系统中的每个并发执行的活动都由TASK(任务)…...
陇剑杯 2021刷题记录
题目位置:https://www.nssctf.cn/上有 陇剑杯 2021 1. 签到题题目描述分析答案小结 2. jwt问1析1答案小结 问2析2答案小结 问3析3答案 问4析4答案 问5析5答案 问6析6答案 3. webshell问1析1答案 问2析2答案 问3析3答案 1. 签到题 题目描述 此时正在进行的可能是_…...
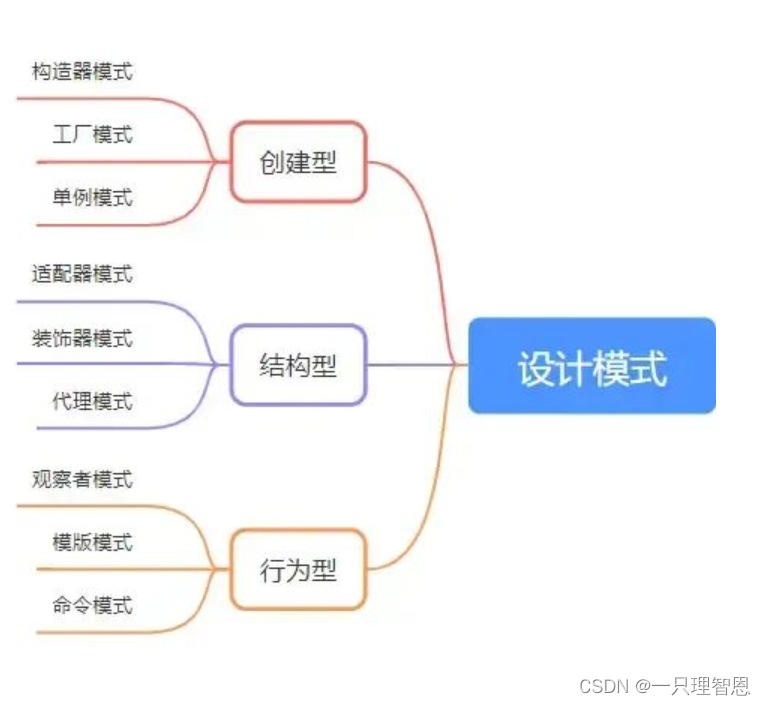
前端常见的设计模式
说到设计模式,大家想到的就是六大原则,23种模式。这么多模式,并非都要记住,但作为前端开发,对于前端出现率高的设计模式还是有必要了解并掌握的,浅浅掌握9种模式后,整理了这份文章。 六大原则&…...
OpenAI视频生成模型Sora的全面解析:从ViViT、扩散Transformer到NaViT、VideoPoet
前言 真没想到,距离视频生成上一轮的集中爆发(详见《Sora之前的视频生成发展史:从Gen2、Emu Video到PixelDance、SVD、Pika 1.0》)才过去三个月,没想OpenAI一出手,该领域又直接变天了 自打2.16日OpenAI发布sora以来(其开发团队包…...
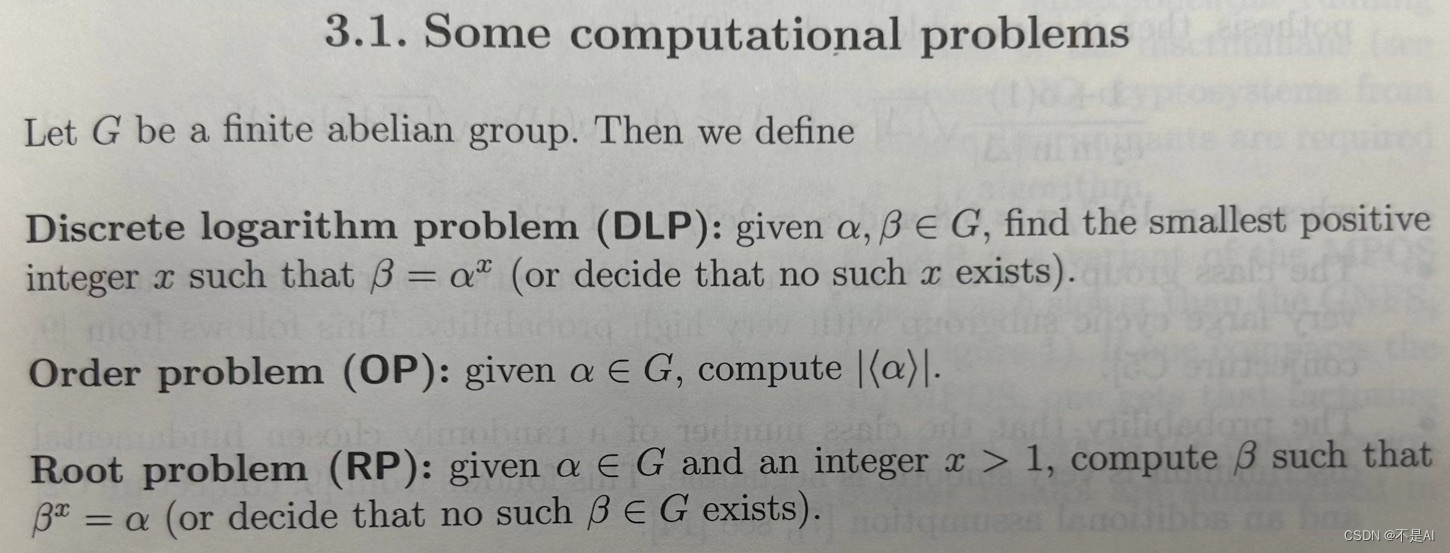
3个密码学相关的问题
一、离散对数问题(Discrete Logarithm Problem, DLP) 问题描述:给定 有限阿贝尓群 G中的2个元素a和b,找出最小的正整数x满足:b a ^^ x (或者证明这样的x不存在)。 二、阶数问题(O…...

5G网络eMBB、uRLLC、mMTC
ITU(国际电信联盟)于2015年9月正式定义了5G的三大应用场景:eMBB(增强型移动宽带)、uRLLC(低时延高可靠通信)、mMTC(海量物联网通信)。 eMBB是4G MBB(移动宽带…...
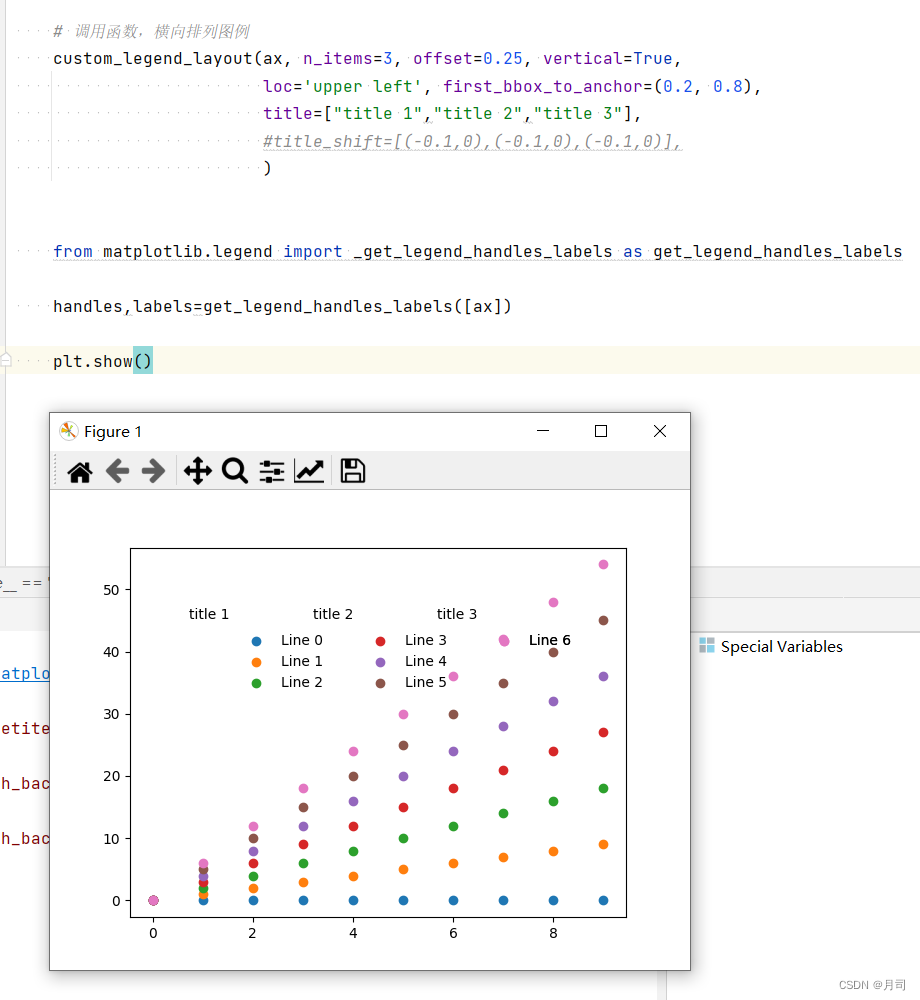
matplotlib图例使用案例1.1:在不同行或列的图例上添加title
我们将图例进行行显示或者列显示后,只能想继续赋予不同行或者列不同的title来进行分类。比较简单的方式,就是通过ax.annotate方法添加标签,这样方法复用率比较低,每次使用都要微调ax.annotate的显示位置。比较方便的方法是在案例1…...
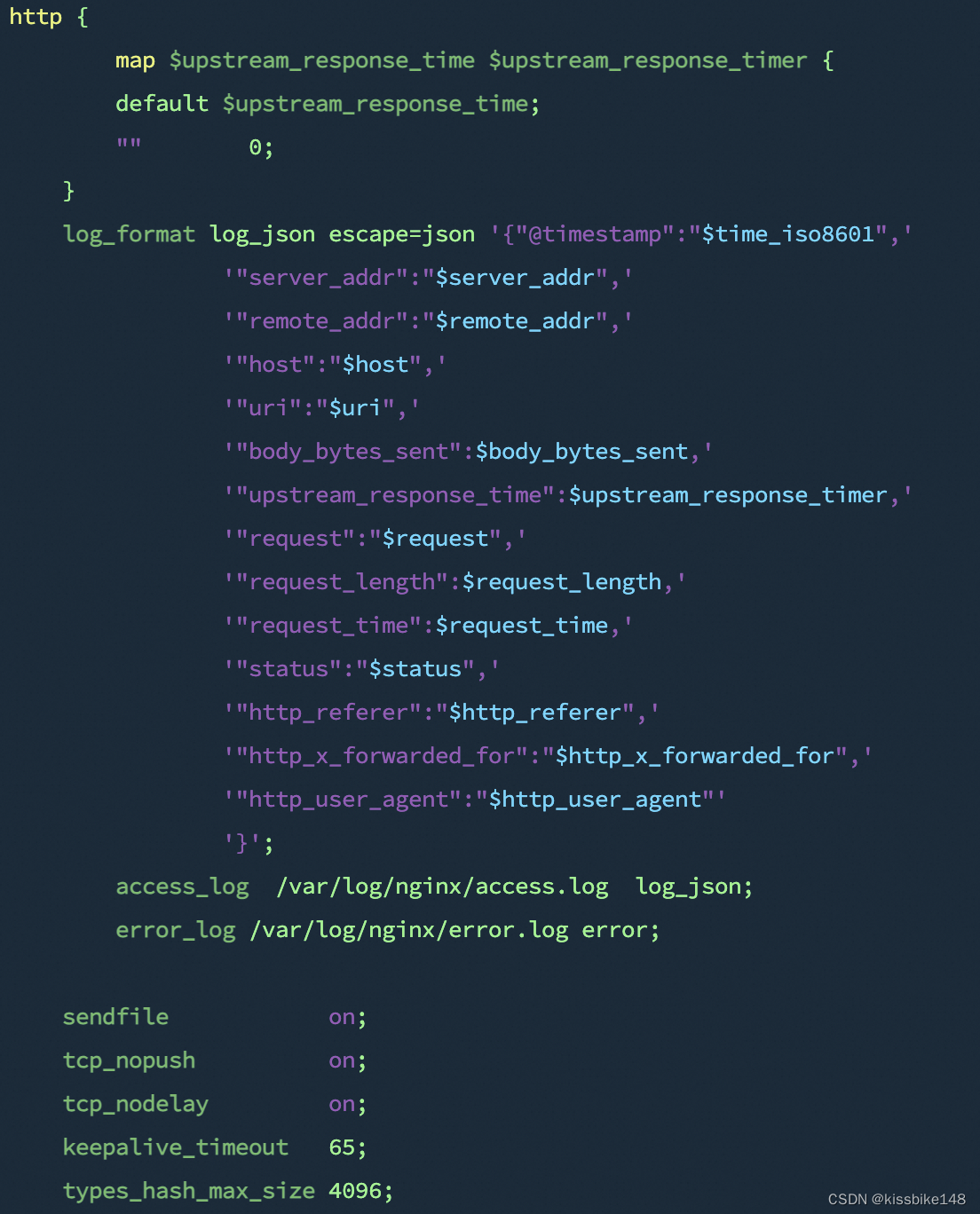
nginx 日志改为json格式
nginx 日志改为json格式 场景描述效果变更旧样式新样式 场景描述 正常使用nginx时,使用默认的日志输出格式,对于后续日志接入其他第三方日志收集、清洗环节,因分隔符问题可能不是很友好。 xxxx - - [19/Feb/2024:11:16:48 0800] "GET …...
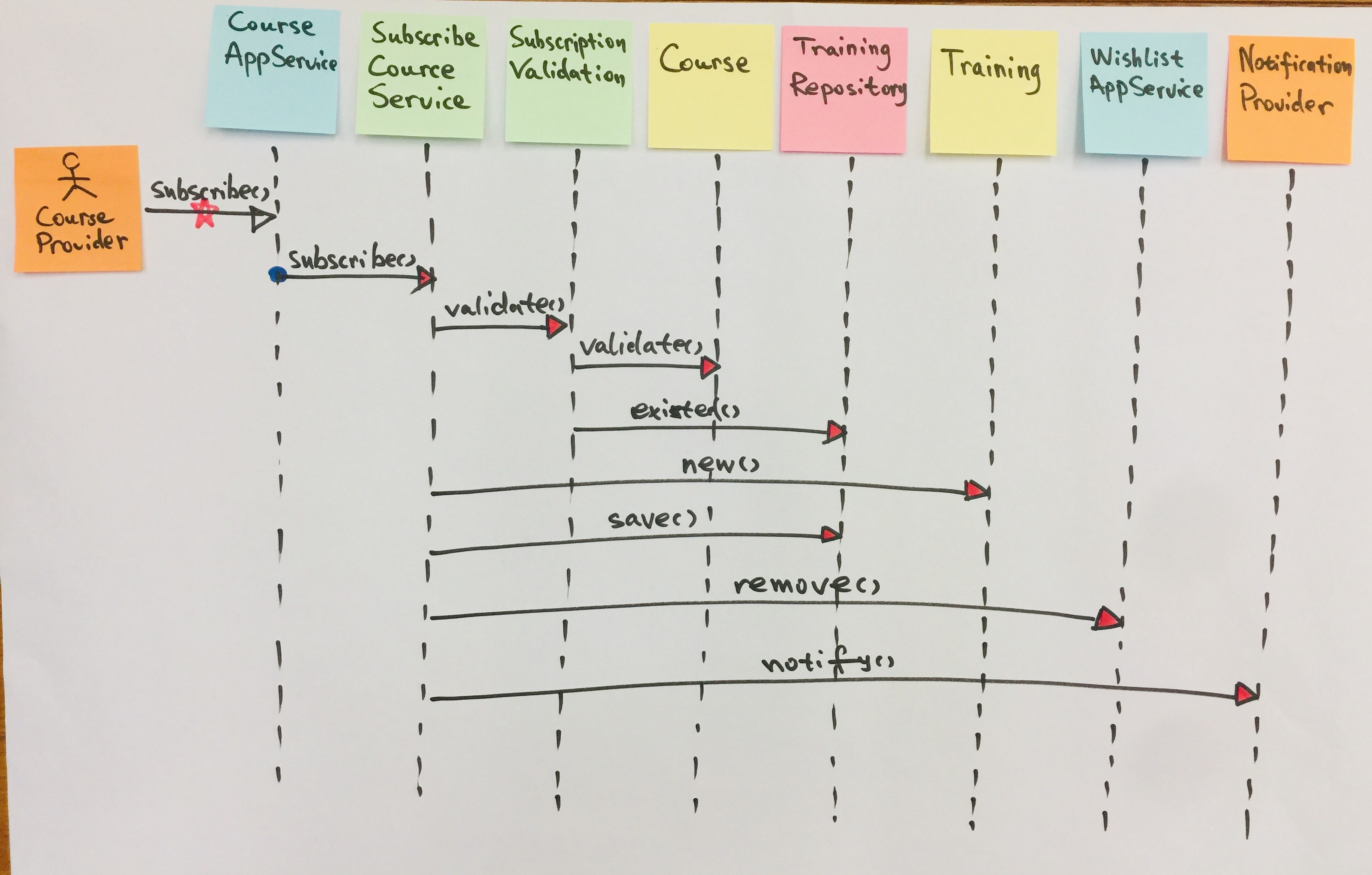
【DDD】学习笔记-应用服务
Eric Evans 为运用领域驱动设计的系统架构划定了层次,在领域层和展现层之间引入了应用层(Application Layer):“应用层要尽量简单,不包含业务规则或者知识,而只为下一层(指领域层)中…...
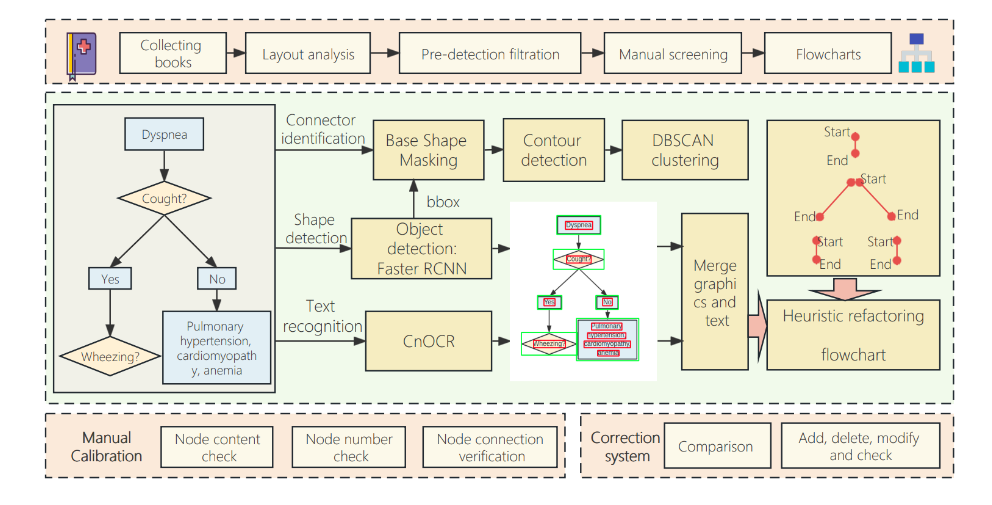
【医学大模型】MEDDM LLM-Executable CGT 结构化医学知识: 将临床指导树结构化,便于LLM理解和应用
MEDDM LLM-Executable CGT 结构化医学知识: 将临床指导树结构化,便于LLM理解和应用 提出背景对比传统医学大模型流程步骤临床指导树流程图识别临床决策支持系统 总结解决方案设计数据收集与处理系统实施临床决策支持 提出背景 论文:https://arxiv.org/p…...

YOLOV8改进系列指南
基于Ultralytics的YOLOV8改进项目.(69.9) 为了感谢各位对V8项目的支持,本项目的赠品是yolov5-PAGCP通道剪枝算法.具体使用教程 专栏改进汇总 二次创新系列 ultralytics/cfg/models/v8/yolov8-RevCol.yaml 使用(ICLR2023)Reversible Column Networks对yolov8主干进行重设计,里…...

FlinkSql一个简单的测试程序
FlinkSql一个简单的测试程序 以下是一个简单的 Flink SQL 示例,展示了如何使用 Flink Table API 和 Flink SQL 进行基本的数据流处理。 定义数据实体 CC : - CC 类表示数据流中的元素,包含两个字段: character (字符&a…...

二、ActiveMQ安装
ActiveMQ安装 一、相关环境二、安装Java8三、下载安装包四、启动五、其他命令六、开放端口七、后台管理 一、相关环境 环境:Centos7.9安装ActiveMQ版本:5.15.9JDK8 二、安装Java8 安装教程:https://qingsi.blog.csdn.net/article/details/…...

AssetStudio深度解析:Unity资源逆向的底层原理与工程实践
1. 这不是“点开即用”的工具,而是Unity资源逆向的手术刀AssetStudio这个名字听起来像某个轻量级小工具——点开、拖入、导出,三步搞定。但实际用过Unity项目逆向的人都知道,它根本不是“一键提取”的魔法棒,而是一把需要你亲手调…...

从脚本到智能体:自动化体系如何被 Agent 重新定义
从脚本到智能体:自动化体系如何被 Agent 重新定义 关键词:智能体Agent、自动化脚本、LLM原生应用、自主决策系统、RAG检索增强生成、工具调用、自动化体系演进 摘要:本文从所有开发者都熟悉的传统自动化脚本痛点切入,用奶茶店员工到金牌店长的生活化类比,一步步拆解自动化…...

对比一圈后 AI智能降重工具深度测评与推荐
2026年真正好用的AI论文降重与改写工具,核心看降重效果、去AI味、格式保留、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 …...

2026最新大模型入门电子书学习推荐,必读9本大模型书籍
大模型入门必读的9本书籍汇总NO.1: 《基于GPT-3,ChatGPT,GPT-4等Transformer架构的自然语言处理》主要内容: 了解用于解决复杂语言问题的新技术。将GPT-3与T5、GPT-2和基于BERT的Transformer的结果进行对比。使用TensorFlow、PyTorch和GPT-3执…...

Claude ROI计算模型:3步完成TCO建模→价值映射→敏感性压测,附金融/医疗/制造三大行业参数包
更多请点击: https://kaifayun.com 第一章:Claude ROI计算模型:3步完成TCO建模→价值映射→敏感性压测,附金融/医疗/制造三大行业参数包 Claude ROI计算模型专为AI代理落地设计,将传统IT投资回报分析升级为可量化、可…...

XZ62N,0.7uA静态电流,NMOS输出电压检测芯片
产品概述 这系列芯片是使用 CMOS 技术开发的高精度、低功耗、小封装电压检测芯片。检测电压在小温度漂移的情况下保持极高的精度。输出配置是N-channel open drai 输出。 产品特点 ● 封装:SOT23-3 ● 输出配置:N-channel open drain ● 工作电压&a…...

如何用嘎嘎降AI处理土木工程论文:土木工程研究生毕业论文降AI4.8元完整操作教程
如何用嘎嘎降AI处理土木工程论文:土木工程研究生毕业论文降AI4.8元完整操作教程 关于土木工程论文降AI教程,有几个细节提前知道能少走很多弯路。 核心用嘎嘎降AI(www.aigcleaner.com),4.8元,达标率99.26%…...
)
从‘相框’与‘相片’说起:彻底搞懂MFC文档/视图架构与消息路由(含实战避坑)
从相框到相片:深入解析MFC文档/视图架构的设计哲学与实战应用 在Windows桌面应用开发的历史长河中,MFC(Microsoft Foundation Classes)作为经典的C框架,其独特的文档/视图架构一直是开发者又爱又恨的设计。想象一下相框…...
Unity UGUI血条蓝条从零实现:Canvas层级、RectTransform锚点与FillAmount原理
1. 这不是“拖拽控件就完事”的UI课,而是让你真正理解UGUI底层逻辑的起点 很多人学Unity UI,上来就是打开Canvas、拖个Button、改个颜色、加个OnClick事件——看起来5分钟就能做出个界面,结果一到要做血条、要动态更新、要适配不同分辨率、要…...

CV产线MLOps平台:图像原生处理与硬件感知交付
1. 项目概述:这不是又一个“模型训练平台”,而是一套能真正跑通CV产线的MLOps工作流“Streamline Your Computer Vision Stack with an End-to-End MLOps Platform”——这个标题里藏着三个被太多团队长期忽视的关键事实:第一,“C…...