机器人十大前沿技术(2023-2024年)
2023-2024年机器人十大前沿技术
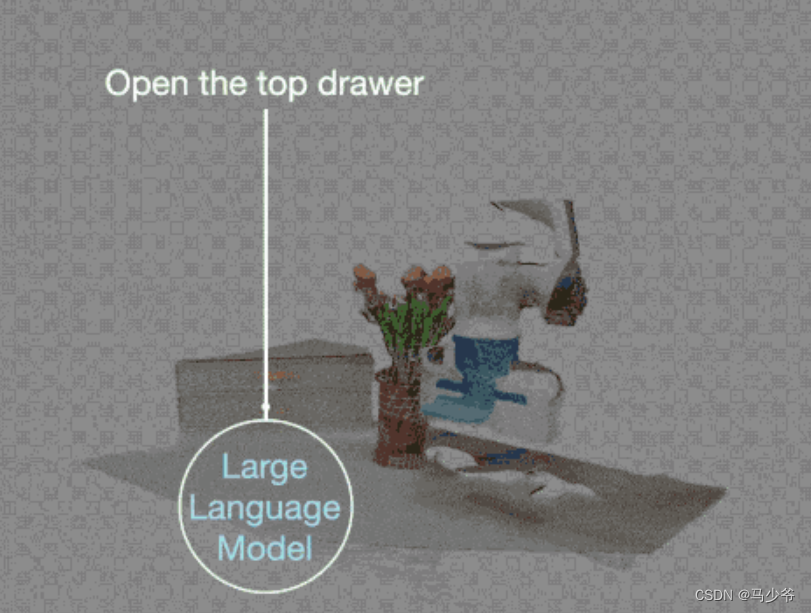
1. 具身智能与垂直大模型
具身智能是指拥有自主感知、交互和行动能力的智能体,能够与环境进行实时互动,从而实现对环境的理解和适应。
“大模型”是指在深度学习和人工智能领域中,使用大量参数和数据进行训练的复杂神经网络模型。在一些垂直领域,如医疗领域、法律咨询、金融分析等领域具有重要的潜在应用。
将大模型与具身智能相结合,与文本、图像、音频等多模态数据的联合分析,可创造更强大、更智能的机器人系统;在人机交互领域,结合知识性和适合标准化的场景与大模型紧密融合,在机器人聊天、陪护、助理、科教等领域,使得机器人更好地应对各种情境和复杂的环境,有望获得规模化良好应用。
核心技术包括:智能体环境感知与建模、智能体自主决策与规划、人机交互、群控协作、机器学习与强化学习等技术。
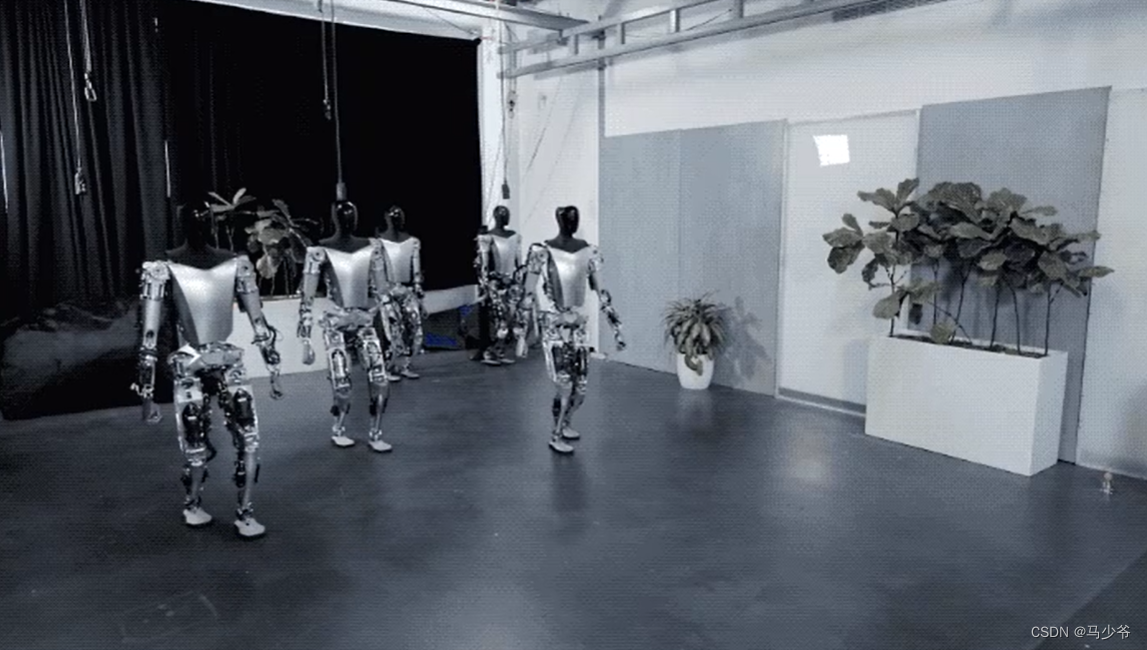
2. 人形与四足仿生机器人
“仿生机器人”是指受生物学原理和生物体结构启发,设计和制造的机器人,以模仿生物的运动、行为和外貌,实现更自然、更适应性强的性能。包括四足机器人、人形机器人、仿鱼水下机器人、仿生扑翼机器人等。
伴随着高性能关节驱动器、运动算法、机器视觉、灵巧操作以及大模型等技术快速发展,使得四足、人形等仿生机器人落地成为现实。
随着特殊服役、工业生产、商业服务、家庭服务等领域的潜在需求,相关技术攻关和新品发布十分活跃。

3. 三维感知模型与多模态信息融合
三维感知模型与多模态信息融合将来自不同传感器和数据源的多种信息进行整合,可更全面、准确地理解环境的特征。融合信息涵盖图像、点云、声音等不同类型的数据。
多模态信息融合可克服单一传感器存在的局限性,提供更全面、鲁棒的信息,有助于在机器人导航、人机交互、环境监测、自动驾驶等取得更好性能;同时,面临传感器不一致性、数据同步、信息不完整等挑战。
三维感知模型与多模态信息融合与具身智能、垂直大模型的协同和融合,将进一步扩大机器人应用范围。
核心技术包括:结构光和立体视觉、三维物体检测和分割、多模态特征提取、融合模型设计等。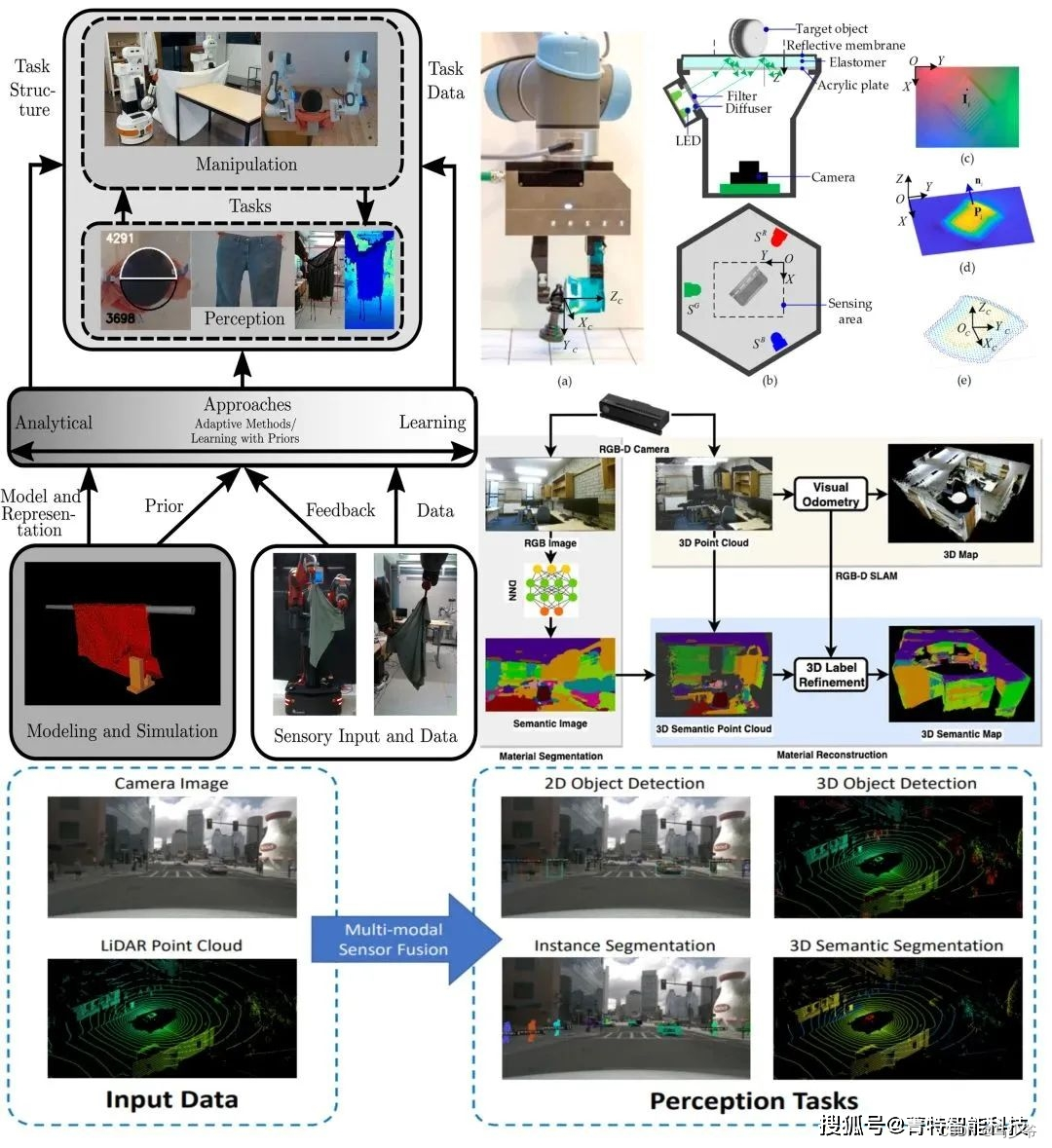
4. 机器人新型核心零部件与灵巧操作
减速器、伺服电机及驱动器、控制器作为传统机器人的三大核心零部件,我国已基本实现国产化,并呈现从中低端逐步往高端零部件发展的趋势。
伴随着MEMS、传感器等技术的快速发展,视觉、力觉传感器、高速/高功率的微小型电机/液压驱动器作为机器人实现智能化、数字化、柔性化的“敲门砖”,逐渐成为新一代机器人重要核心零部件。
机器人模块化趋势不断凸显,近些年刚柔耦合的灵巧手、微小执行器、微型伺服电缸、移动模组等不断出现,有望成为新一代机器人的重要核心零部件。


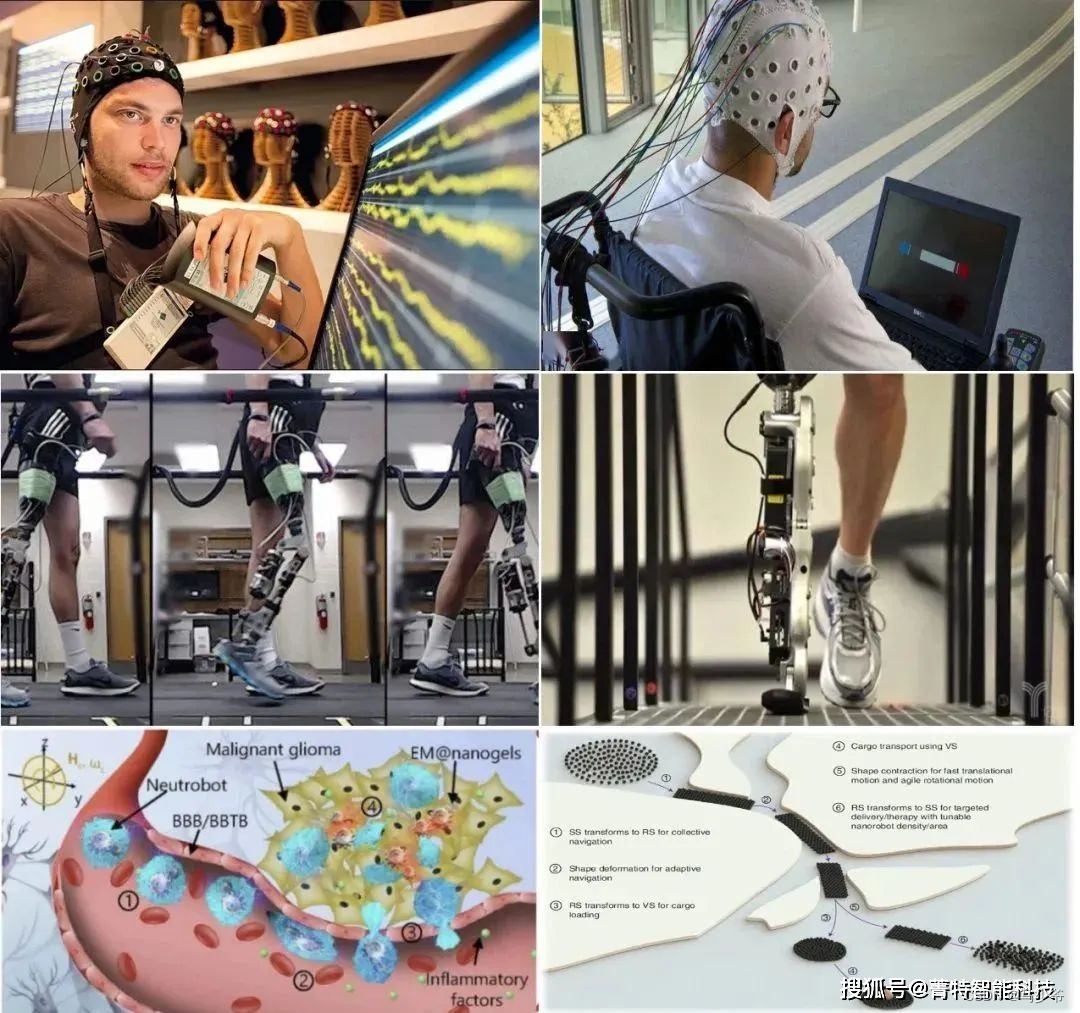
5. 脑机接口、生肌电一体化与微纳机器人
脑机接口是一种直接连接人类或动物大脑与外部设备,实现脑与设备之间信息交流的技术。将机器人与脑部认知相结合,应用于残障、医疗、航空航天、教育、娱乐等领域,具有广泛的应用前景。
生机电一体化是近年来快速发展的前沿科学技术,通过将生物体的神经信息获取、处理和传递的机制与电子技术相结合,创造出更紧密连接人体和机器的交互模式。
微纳机器人:具备微小、精准、靶向、低损伤、超高精度可控等优点,被认为是未来对抗人体疾病的理想武器之一。在生物医学、组织工程、微电子技术等领域具有广阔应用前景。
核心技术包括:DNA折纸技术、微纳操作、亚微米级微操作台、智能化细胞克隆、新材料与微电子技术等。
6. 医疗与康复机器人
医疗机器人通过结合机器人技术和医疗专业知识,为医生提供更精确、稳定和精细的手术控制,从而改善手术过程,减少创伤和恢复时间,同时也为医生提供更多的信息。在骨科手术、脑外科手术、穿刺介入、牙科、眼科、可穿戴式等医疗操作中得以广泛运用。
康复机器人凭借先进的传感技术和精确的运动控制,可协助偏瘫患者恢复运动能力,或满足永久性损伤患者日常生活需求,提升人们的生活质量。
随着智能图像导航、机器人力位控制、高精度运动控制、遥操作等技术快速发展,医疗与康复机器人将变得更加智能化、自主化。
7. 商业服务机器人
室外商业服务机器人主要应用于无人配送、无人巴士/出租、道路清洁、无人巡检等服务场景,具有智能化程度高、运维成本低、可靠性高等特点。
室内商业服务机器人主要应用于室内环境中的导航服务、商业清洁、餐饮配送、无人售货、无人餐厅等服务场景。
伴随着激光雷达、伺服电机等零部件的价格下降,自主导航技术的成熟,在庞大市场需求下,无人配送成为发展热点,无人配送机器人呈现由室内向室外转变的趋势。
核心技术包括:环境感知、地图构建、定位与路径规划、动态识别、实时避障、机器视觉、柔顺抓取、人机交互、智能决策与控制等。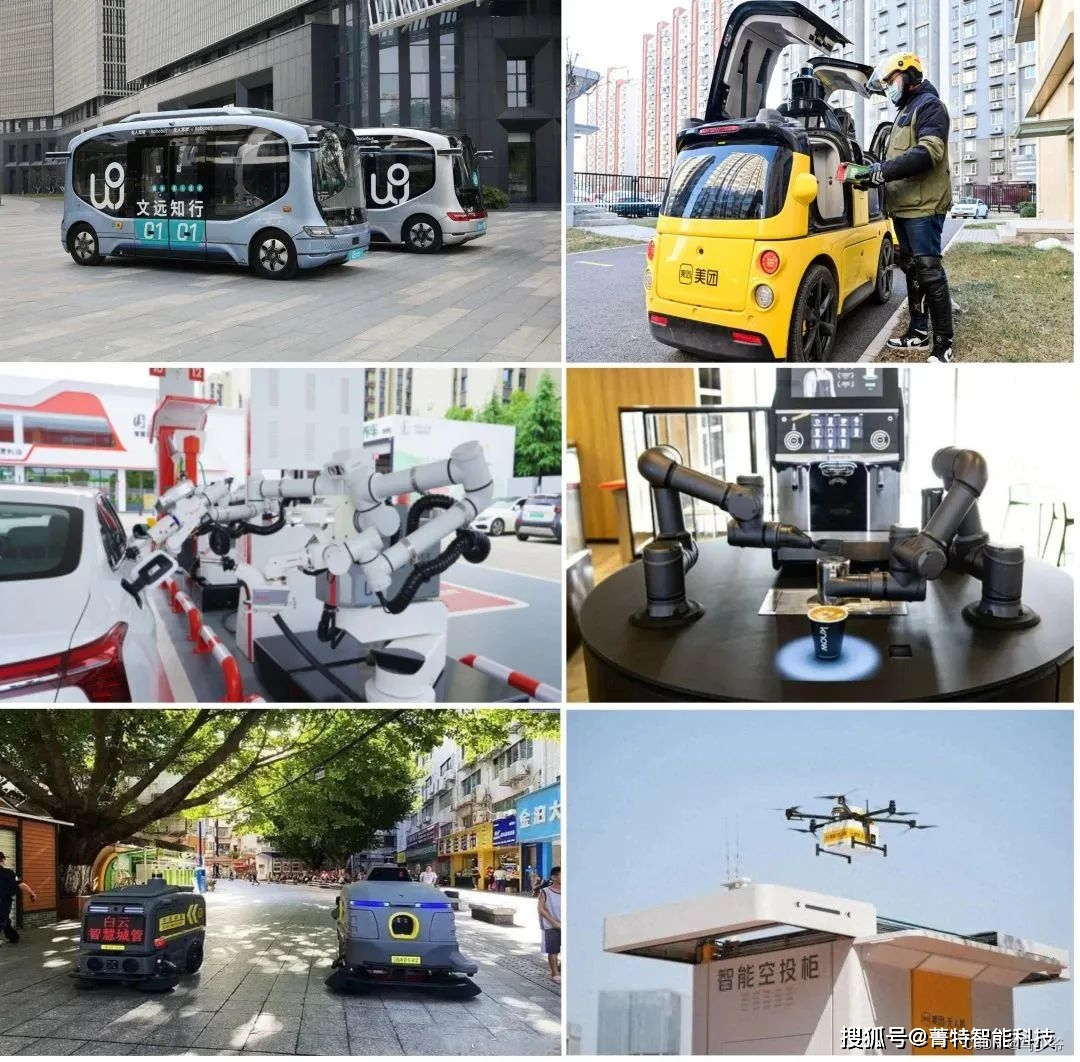
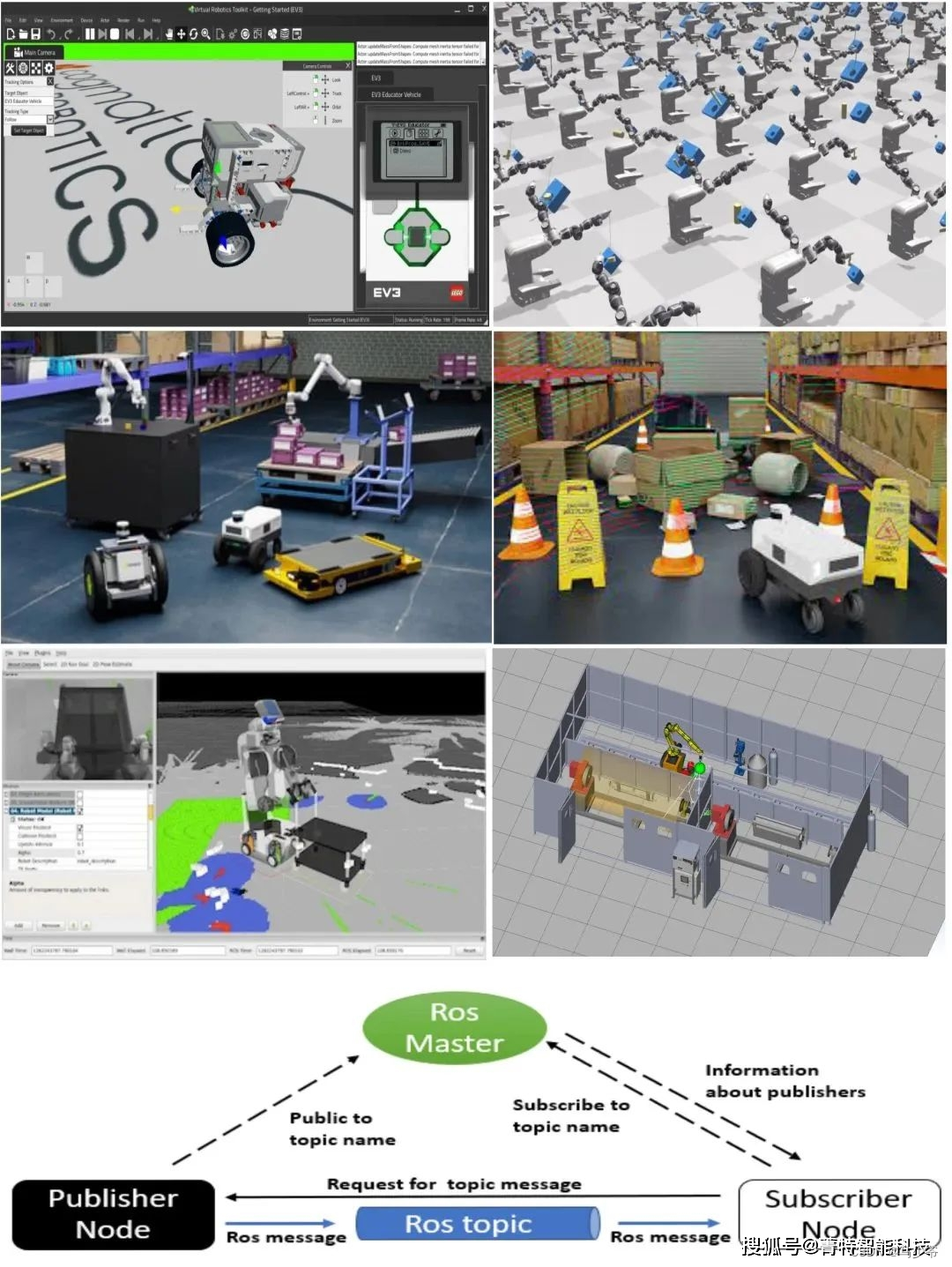
8. 机器人操作系统/云平台
机器人操作系统包括硬件抽象、底层设备控制、常用功能实现、进程间消息和数据包管理等功能。根据不同行业需求,衍生出不同场景的机器人操作系统,如面向教育科研、商业服务、无人驾驶、工业智能等场景的操作系统或平台。
机器人操作系统的发展推动机器人标准化、模块化,实现物理空间和数字空间的数字孪生,促进机器人大规模应用。
云服务机器人是指将机器人的核心计算和智能部分部署在云端服务器,借助云计算技术提供更大的计算能力和资源,以实现更强大、更高效的数据处理和应用。“云端大脑+本地机体”或“云端服务”机器人将成为规模化推广与应用的重要模式之一。
核心技术包括:机器人操作系统内核及通信协议栈、机器人运动控制与动态轨迹规划、机器人自学习、分布式计算、服务化架构、服务器监控与管理等。
9. 群体机器人技术
群体机器人技术是指多台机器人在一个团队或群体中协同工作、交流和协作的技术。机器人可通过相互通信、信息共享和协同行动,实现集体智能,以完成复杂任务和目标。
群体机器人技术的发展受益于多领域的知识,包括分布式系统、协同算法、Agent技术、通信技术等,促进机器人之间实时交流、协调行动,并在不同环境下适应变化。
群体机器人技术的应用领域广泛,包括但不限于军事、交通、巡检、无人机等领域。随着人工智能的发展,集群智能作为人工智能的分支,将得到越来越多的应用,有望在机器人等领域创造出新的应用和创新。
核心技术包括:群体动力学建模、群体仿真、感知和信息共享、定位与导航、通信协议和拓扑、任务分配与协作等。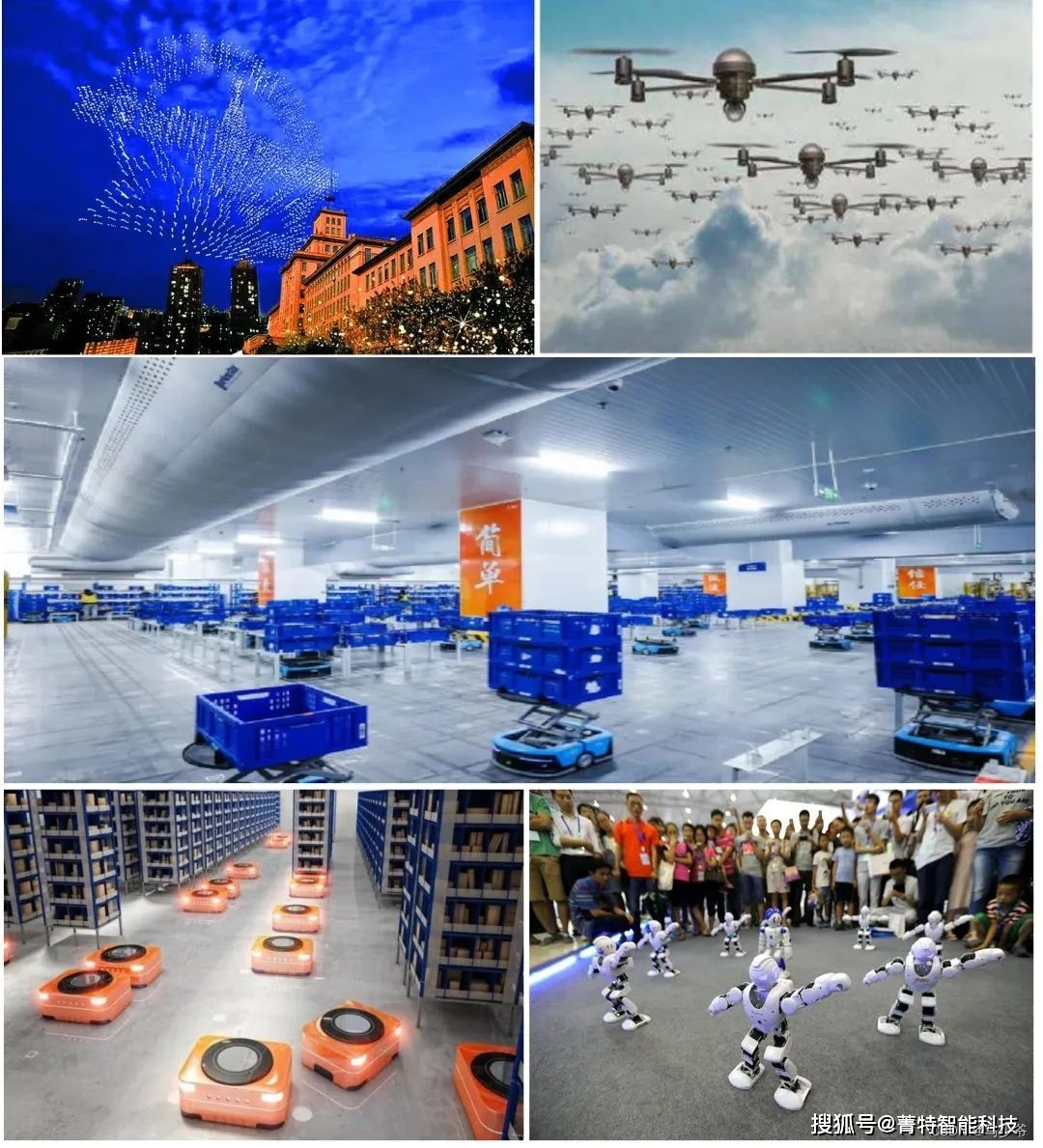
10.特殊场景服役机器人—军事、消防、农业、核工业、太空等领域
特殊场景服役机器人是指在特定环境或情况下执行任务的机器人。这些机器人被设计和配置用于应对特殊的工作环境、任务需求或挑战。
在消防救援、电力勘测、农业、建筑、核工业、反恐防暴、国防安全、空间探测等领域具有巨大需求。
特殊场景服役机器人的设计和应用,需考虑特殊环境下的安全性、稳定性、通讯能力以及适应性。
核心技术包括:特种材料、防水、防爆、防辐射、极压适应、水下通信、生物相容性、极端温度适应、威慑和防卫等。
相关文章:
机器人十大前沿技术(2023-2024年)
2023-2024年机器人十大前沿技术 1. 具身智能与垂直大模型 具身智能是指拥有自主感知、交互和行动能力的智能体,能够与环境进行实时互动,从而实现对环境的理解和适应。 “大模型”是指在深度学习和人工智能领域中,使用大量参数和数据进行训…...

Spring: MultipartFile和File的区别
文章目录 一、MultipartFile和File对比1、 MultipartFile:2、File: 一、MultipartFile和File对比 MultipartFile 和 File 是用于处理文件上传的两种不同类型,主要在不同的编程环墨境中使用。 1、 MultipartFile: - MultipartFi…...
ncnn之三(补充):window环境下vs2022安装ncnn+protobuf
启动VS2022 下面的 x64 Native Tools Command Prompt for VS2022 protobuf git clone gitgithub.com:protocolbuffers/protobuf.git# 或者 下载 https://github.com/google/protobuf/archive/v3.11.2.zip cmake -G"NMake Makefiles" -DCMAKE_BUILD_TYPERelease -D…...

第五篇【传奇开心果系列】Python文本和语音相互转换库技术点案例示例:详细解读pyttsx3的`preprocess_text`函数文本预处理。
传奇开心果短博文系列 系列短博文目录Python文本和语音相互转换库技术点案例示例系列 短博文目录前言一、pyttsx3的preprocess_text函数文本预处理基本用法示例代码二、实现更复杂的文本预处理逻辑示例代码三、去除停用词、词干提取示例代码四、词形还原、拼写纠正示例代码五、…...

logback实践
1:日志区分环境 2:debug info warn error日志文件不一样 3: 文件滚动日志 4:启动可带参数 --spring.profiles.activedev --log.levelinfo 5:可从配置文件中获取上下文参数 logback-spring.xml 放在 classpath 下面 <configuration scan"false" scanPer…...

深入理解java虚拟机---自动内存管理
2.2 运行时数据区域 Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域。这些区域有各自的用途,以及创建和销毁的时间,有的区域随着虚拟机进程的启动而一直存在,有些区域则是依赖用户线程的启动和结束而建立和销…...
)
粉笔规范词积累(文化发展)
活态保护/活态传承 基本释义 是在文化遗产生成发展的环境当中进行保护和传承,在人民群众生产生活过程中进行传承与发展。 应用场景 当资料中出现“让文化遗产不仅‘活’在历史中,更‘活’在人们的生产生活中”等类似表述,可概括为“活态保…...

如何在Ubuntu部署Emlog,并将本地博客发布至公网可远程访问
文章目录 前言1. 网站搭建1.1 Emolog网页下载和安装1.2 网页测试1.3 cpolar的安装和注册 2. 本地网页发布2.1 Cpolar临时数据隧道2.2.Cpolar稳定隧道(云端设置)2.3.Cpolar稳定隧道(本地设置) 3. 公网访问测试总结 前言 博客作为使…...

Axios
Axios简介 axios框架全称(ajax – I/O – system): 基于promise用于浏览器和node.js的http客户端,因此可以使用Promise API 一、axios是干啥的 说到axios我们就不得不说下Ajax。在旧浏览器页面在向服务器请求数据时࿰…...

数据仓库选型建议
1 数仓分层 1.1 数仓分层的意义 **数据复用,减少重复开发:**规范数据分层,开发一些通用的中间层数据,能够减少极大的重复计算。数据的逐层加工原则,下层包含了上层数据加工所需要的全量数据,这样的加工方…...

每日一题——LeetCode1470.重新排列数组
方法一 把数组的前n项看做一个数组,后n项看做一个数组,两个数组循环先后往res里push元素 var shuffle function(nums, n) {let res[]for(let i0;i<n;i){res.push(nums[i])res.push(nums[in])}return res }; 消耗时间和内存情况: 方法二…...

网络安全--网鼎杯2018漏洞复现(二次注入)
一、环境:在线测试平台 BUUCTF在线评测 (buuoj.cn) 二、进入界面先尝试万能账号 1or11# 换格式 hais1bux1 11or11# 三、万能的不行那我们就得想注册了,去register.php去看看 注册个账号 发现用户名回显,猜测考点为用户名处二次注入&…...
CSS篇--transform
CSS篇–transform 使用transform属性实现元素的位移、旋转、缩放等效果 位移 // 语法 transform:translate(水平移动距离,垂直移动距离) translate() 如果只给一个值,表示x轴方法移动距离 单独设置某个方向的移动距离:translateX() transla…...

阿里云国际-在阿里云服务器上快速搭建幻兽帕鲁多人服务器
幻兽帕鲁是最近流行的新型生存游戏。该游戏一夜之间变得极为流行,同时在线玩家数量达到了200万。然而,幻兽帕鲁的服务器难以应对大量玩家的压力。为解决这一问题,幻兽帕鲁允许玩家建立专用服务器,其提供以下优势: &am…...

vite 快速搭建 Vue3.0项目
一、初始化项目 npm create vite-app <project name>二、进入项目目录 cd ……三、安装依赖 npm install四、启动项目 npm run dev五、配置项目 安装 typescript npm add typescript -D初始化 tsconfig.json //执行命令 初始化 tsconfig.json npx tsc --init …...

深入理解Python爬虫的Response对象
源码分享 https://docs.qq.com/sheet/DUHNQdlRUVUp5Vll2?tabBB08J2 在构建Python爬虫时,理解HTTP响应(Response)是至关重要的。本篇博客将详细介绍如何使用Python的Requests库来处理HTTP响应,并通过详细的代码案例指导你如何提取…...

centos7下docker的安装
背景 总结下docker的一些知识 docker安装(有网络版) 参考文章我以前试过这个帖子,建议安装高版本的docker,(20以上的,不然可能会有一些问题) ## 1、安装依赖 [rootiZo7e61fz42ik0Z ~]#yum i…...

Excel SUMPRODUCT函数用法(乘积求和,分组排序)
SUMPRODUCT函数是Excel中功能比较强大的一个函数,可以实现sum,count等函数的功能,也可以实现一些基础函数无法直接实现的功能,常用来进行分类汇总,分组排序等 SUMPRODUCT 函数基础 SUMPRODUCT函数先计算多个数组的元素之间的乘积…...
C#上位机与三菱PLC的通信08---开发自己的通讯库(A-1E版)
1、A-1E报文回顾 具体细节请看: C#上位机与三菱PLC的通信03--MC协议之A-1E报文解析 C#上位机与三菱PLC的通信04--MC协议之A-1E报文测试 2、为何要开发自己的通讯库 前面使用了第3方的通讯库实现了与三菱PLC的通讯,实现了数据的读写,对于通…...

ABAQUS应用04——集中质量的添加方法
文章目录 0. 背景1. 集中质量的编辑2. 约束的设置3. 总结 0. 背景 混塔ABAQUS模型中,机头、法兰等集中质量的设置是模型建立过程中的一部分,需要研究集中质量的添加。 1. 集中质量的编辑 集中质量本身的编辑没什么难度,我已经用Python代码…...
)
【RK3588-AI-004】RK3588 AI专属依赖环境预装(Python、OpenCV、基础编译工具)
📖 专栏介绍 本专栏为RK3588 端侧AI开发零基础实战教程,专为嵌入式AI入门、模型部署、视觉开发学习者打造。全程实操、无废话、避坑优化,从零搭建RK3588专属AI开发环境,手把手教学,新手也能轻松上手。 ✅ 硬件适配&am…...

FPGA硬件加速架构设计与AXI Stream优化实践
1. FPGA硬件加速架构设计解析在当今高性能计算领域,FPGA因其可重构特性和并行计算能力,已成为硬件加速的重要选择。我们基于Xilinx Alveo U50 FPGA平台构建的加速系统,采用了分层通道设计和AXI Stream高速互联技术,实现了网络数据…...

MoE稀疏激活原理与工程实践:解密大模型2%参数调用真相
1. 项目概述:参数规模与稀疏激活的真相拆解“GPT-4 Has 1.8 Trillion Parameters. It Uses 2% of Them Per Token.”——这句话过去两年在技术社区反复刷屏,常被当作“AI算力爆炸”的标志性论断。但作为从2016年就开始跑LSTM、2018年手写Transformer Enc…...

Agent Runtime 重构:Session 作为事件日志的工程实践
1. 这不是新赛道,而是 runtime 层的“操作系统时刻”正在重演你有没有试过让一个 AI 代理连续工作四十分钟?不是闲聊,而是真干活:查数据库、调 API、读文档、写代码、改配置、再验证——一环扣一环。去年我带团队跑一个客户的数据…...

AI Agent Harness Engineering 技术选型指南:根据场景选择合适的大模型与框架
AI Agent Harness Engineering 技术选型指南:根据场景选择合适的大模型与框架 引言 痛点引入 你是否遇到过这样的场景?产品经理拍板要做一个**“能帮企业HR自动筛选简历、邀约面试、生成入职指南并跟进试用期转正材料”**的“超级HR助手”AI Agent——…...
指针详解与应用)
(C语言)指针详解与应用
指针是C语言的灵魂,指针与底层硬件联系紧密,使用指针可操作数据的地址,实现数据的间接访问。指针即指针变量,用于存放其他数据单元,如变量、数组、结构体和函数的首地址。若指针存放了某个数据单元的首地址,…...

《CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略》020、从原理到部署的深度学习优化全攻略
CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略 020、DEIM在嵌入式设备上的部署:ONNX导出与TensorRT优化 一、凌晨三点的调试现场 上周五晚上,我盯着Jetson Orin的终端,看着DEIM模型推理速度卡在12.3ms纹丝不动。旁边同事的YOLOv8已经跑到3.2ms了,差…...

2026年AI写作辅助网站测评:5款神器从选题到格式全流程护航
写论文的焦虑,是每个科研人和学生都无法回避的“成长痛”。选题无从下手,文献检索耗时费力,写作过程卡顿不断,格式调整反复修改,查重降重更是让人抓耳挠腮。进入2026年,AI工具早已不只是“文字助手”&#…...

观察Taotoken账单明细实现精准成本追溯
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken账单明细实现精准成本追溯 对于使用大模型API的开发者而言,成本控制与优化是项目持续运营的关键。单纯依赖…...
)
告别盲测!用Arduino UNO和VL6180X做个桌面防撞小助手(OLED实时显示距离)
用Arduino UNO和VL6180X打造智能桌面防撞系统 每次在办公桌上不小心碰倒水杯或手机从桌边滑落时,那种手忙脚乱的场景想必大家都不陌生。今天我们就来解决这个日常小烦恼——利用Arduino UNO开发板和VL6180X传感器,配合OLED显示屏,制作一个能实…...