QEMU开发入门
1. 简介
QEMU(Quick EMUlator)是一个开源的虚拟化软件,它能够模拟多种硬件平台,并在这些平台上运行各种操作系统。QEMU可以在不同的主机架构之间进行虚拟化,例如x86、ARM、PowerPC、Risc-V等。QEMU是一个功能强大且灵活的虚拟化软件,可用于多种应用场景,包括系统仿真、硬件虚拟化、交叉编译以及设备模拟等。它广泛应用于开发、测试和部署各种软件和操作系统。
以下是QEMU的一些重要特点和用途:
- 系统仿真:QEMU可以模拟整个计算机系统,包括处理器、内存、硬盘、网络接口等。这使得用户可以在自己的计算机上运行不同体系结构的操作系统,如在x86主机上运行ARM操作系统。
- 虚拟化支持:QEMU提供了硬件虚拟化功能,允许在宿主机上创建和管理虚拟机。这样可以在一台物理机上同时运行多个操作系统实例,每个实例都像独立的计算机一样运行。
- 交叉编译支持:QEMU可以为不同的目标平台提供交叉编译环境,以便在一种体系结构上编译代码并在另一种体系结构上执行。
- 快速启动时间:QEMU通过使用动态二进制翻译技术(Dynamic Binary Translation)来提高性能。它将客户机指令动态转换为主机指令,从而提供接近原生速度的执行效率。
- 虚拟设备模拟:QEMU提供了许多虚拟设备模拟,如磁盘驱动器、网络接口卡、显卡等。这些设备可以用于测试和开发目的,或者在虚拟机中运行嵌入式操作系统。
2. 安装
QEMU适用于Windows、Linux和Mac,因为Linux开源的原因,QEMU在Linux上能够更好地利用虚拟化等技术,使得虚拟的性能相较其他平台会更好一些。通用情况下,可以直接使用预编译后的二进制版本,如果需要进行额外地扩展,可以自行编译版本。
2.1. Windows
2.1.1. 二进制版本
● 可以从https://qemu.weilnetz.de/下载相应的版本。
● 可以在MSYS32中通过命令 pacman -S qemu 来安装。
2.1.2. 编译版本
Windows版本的QEMU需要使用mingw来编译,可以在Linux下编译,也可以在Windows下编译。Windows下推荐使用MSYS2进行编译。
- 从MSYS2官网下载安装最新版本。
- 启用MSYS2,更新最新源。
pacman -Syu
- 重启MSYS2,更新最新软件包。
pacman -Su
- 安装基本开发工具包
pacman -S base-devel mingw-w64-x86_64-toolchain git python ninja
- 安装QEMU相关依赖包
pacman -S mingw-w64-x86_64-glib2 mingw-w64-x86_64-pixman python-setuptools
- 添加扩展特性依赖包
pacman -S mingw-w64-x86_64-gtk3 mingw-w64-x86_64-SDL2 mingw-w64-x86_64-libslirp
- 关闭MSYS2控制台。
- 启动msys目录下的mingw64.exe。
- 下载最新的QEMU源代码
git clone https://gitlab.com/qemu-project/qemu.git
// gitlab较慢时,可以使用国内镜像
git clone https://gitee.com/mirrors/qemu.git
- 编译
cd qemu
./configure
make
更多编译方法参见:QEMU Build for Windows
2.2. Linux
此处主要以ubuntu 22.04版本为例。
2.2.1. 二进制版本
Linux下的qemu各版本需要分别安装,如:
sudo apt install qemu-system-arm
sudo apt install qemu-system-aarch64
sudo apt install qemu-system-riscv32
sudo apt install qemu-system-riscv64
2.2.2. 编译安装
推荐从源码编译安装,更方便调试添加打印信息。推荐以tag版本安装,更可靠。以下测试是基于从gitee上克隆的版本进行测试。安装可以配置–enable-debug启用调试。
git clone https://gitee.com/mirrors/qemu.git
cd qemu
mkdir build
cd build
…/configure
make -j8
sudo make install
2.2.3. 测试
输入qemu-system-aarch64 -version显示以下信息表示安装成功。
QEMU emulator version 8.1.93 (v8.2.0-rc3)
Copyright © 2003-2023 Fabrice Bellard and the QEMU Project developers
3. 使用
3.1. 嵌入式裸机
此处以最小系统嵌入式固件来演示使用过程,并且分别演示Windows和Linux下的交叉编译,以及基于Cortext-M和risc-v两个当下流行的单片机为例。代码只执行一个Uart打印信息。
int main (void)
{InitUart();UartWrite("Hello World!\n", 13);while (1){/* code */}return 0;
}
3.1.1. Cortex-M7
- 下载交叉编译工具,https://developer.arm.com/downloads/-/gnu-rm
- 将工具目录(如D:/toolchains/arm/arm-eabi-v103/bin)添加进环境目录。
- 进入代码目录,以make编译生成elf文件。
- 运行elf
qemu-system-arm.exe -machine mps2-an385 -monitor null -semihosting --semihosting-config enable=on,target=native -kernel $(APP) -serial stdio -nographic

- 调试运行elf
a. -S表示暂停在固件的起始指令。
b. -s是-gdb tcp::1234的简写,表示启动tcp远程调试。
qemu-system-arm.exe -machine mps2-an385 -monitor null -semihosting --semihosting-config enable=on,target=native -kernel $(APP) -serial stdio -nographic -S -s

-
gdb调试

-
结果

3.1.2. RISC-V
riscv-v使用Linux进行测试。
-
安装交叉编译工具链
在https://www.sifive.com/software上下载工具链,并将路径添加进环境路径。 -
编译并运行

-
调试
方法同cortext-m7。
3.1.3. VSCode调试
gdb调试不太方便,利用VSCode可以更方便地查看变量,单步调试代码。添加lanch.json文件,将以下内容覆盖。按F5启动调试,代码即停止在main函数处。
{// Use IntelliSense to learn about possible attributes.// Hover to view descriptions of existing attributes.// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "Launch QEMU to debug HelloWorld.elf","type": "cppdbg","request": "launch","program": "${workspaceFolder}/HelloWorld.elf","cwd": "${workspaceFolder}","miDebuggerPath": "arm-none-eabi-gdb","miDebuggerServerAddress": "localhost:1234","stopAtEntry": true,"preLaunchTask": "Run QEMU"}]
}
3.1.4. 代码
代码包括完整的固件,只需要安装交叉编译工具和qemu,即可以测试。
- make 编译。
- make qemu 仿真运行。
- make qemu-remote
- gdb -x gdbinit启用调试。
代码路径:https://github.com/feihe027/qemu_mcu
3.2. 嵌入式Linux
3.2.1. ubuntu
3.2.1.1. 安装运行
下面是Cortex-A57 CPU来安装Linux。
- 下载Linux镜像,从官方网站下载ubuntu-20.04-live-server-arm64.iso。(服务器版本无UI)
- 下载EFI启动文件
wget http://releases.linaro.org/components/kernel/uefi-linaro/16.02/release/qemu64/QEMU_EFI.fd -O /data/kvm/QEMU_EFI.fd
- 创建启动盘镜像
qemu-img create ubuntu20.04-arm64.img 32G
- 创建nvme SSD镜像
qemu-img create -f qcow2 nvme.qcow2 10G
- 安装系统
注意,上面4个文件统一放到新建的虚拟机目录,进入目录执行下列命令
qemu-system-aarch64 -machine virt
-cpu cortex-a57
-smp 2
-m 4G
-bios QEMU_EFI.fd
-device virtio-scsi-device
-device scsi-cd,drive=cdrom
-drive if=none,file=ubuntu-20.04-live-server-arm64.iso,id=cdrom,media=cdrom
-device virtio-blk-device,drive=vd0
-drive if=none,file=ubuntu20.04-arm64.img,id=vd0
-drive file=nvme.qcow2,if=none,id=nvme0 -device nvme,drive=nvme0,serial=foo
-net nic -net tap,ifname=tap0,script=no,downscript=no -nographic
几分钟后安装界面,默认往下执行即可,设置用户名密码等,最终进入安装流程,安装会比较慢。安装完成之后,直接关闭当前控制台窗口,不要选Restart,会重新进行安装。
6. 启动虚拟机
启动虚拟机和安装差不多,只是不用cdrom系统文件,直接从镜像启动即可。
qemu-system-aarch64 -machine virt
-cpu cortex-a57
-smp 2
-m 4G
-bios QEMU_EFI.fd
-device virtio-blk-device,drive=vd0
-drive if=none,file=ubuntu20.04-arm64.img,id=vd0
-drive file=nvme.qcow2,if=none,id=nvme0 -device nvme,drive=nvme0,serial=foo
-net nic -net tap,ifname=tap0,script=no,downscript=no -nographic
启动之后,等一两分钟,就会进入系统,输入用户名密码登录。
3.2.2. 调试内核
3.2.2.1. 编译内核
- 下载Kernel代码,测试使用6.8-rc5
git clone https://gitee.com/mirrors/linux_old1.git
- 安装工具链
sudo apt-getinstall gcc-aarch64-linux-gnu
- 配置内核选项
cd linux_old1
// arch/arm64/configs/defconfig 中将CONFIG_RANDOMIZE_BASE=y修改成CONFIG_RANDOMIZE_BASE=n
// 检查CONFIG_DEBUG_KERNEL=y
// 检查CONFIG_DEBUG_INFO_REDUCED=y
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- defconfig
- 编译内核
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- Image -j8
根文件系统制作
根文件系统制作 - 下载最新busybox
- 配置busybox
make menuconfig
Settings —>
[] Build static binary (no shared libs) //静态编译
[] Build with debug information //可选,带调试信息,方便后续调试 - 编译
make && make install
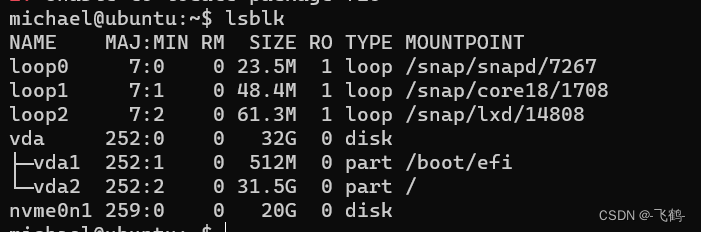
3.2.2.2. 制作根文件
qemu-img create rootfs.img 512m
mkfs.ext4 rootfs.img
mkdir rootfs
sudo mount rootfs.img rootfs
sudo cp -rf _install/* rootfs
cd rootfs
sudo mkdir proc sys dev etc etc/init.d
sudo vim etc/init.d/rcS
sudo chmod +x etc/init.d/rcS
cd …
sudo umount rootfs
//# etc/init.d/rcS文件内容如下
#!/bin/sh
mount -t proc none /proc
mount -t sysfs none /sys
mount -t debugfs none /sys/kernel/debug
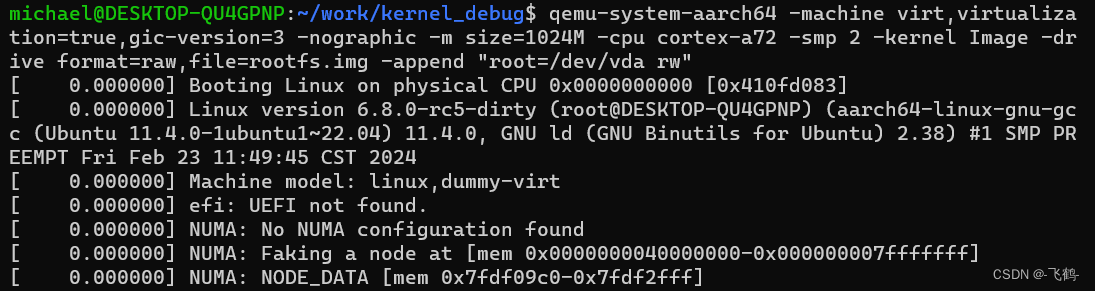
3.2.2.3. 运行
- 将arch/arm64/boot/Image 和rootfs.img 文件拷贝到任意目录。
- 执行下面命令
qemu-system-aarch64 -machine virt,virtualization=true,gic-version=3 -nographic -m size=1024M -cpu cortex-a72 -smp 2 -kernel Image -drive format=raw,file=rootfs.img -append “root=/dev/vda rw”
- 系统开始启动
3.2.2.4. 调试
- 远程启动
qemu-system-aarch64 -machine virt,virtualization=true,gic-version=3 -nographic -m size=1024M -cpu cortex-a72 -smp 2 -kernel Image -drive format=raw,file=rootfs.img -append “root=/dev/vda rw nokaslr” -S -s
- 调整GDB权限问题
创建/root/.gdbinit文件,并写入以下信息
set auto-load safe-path /
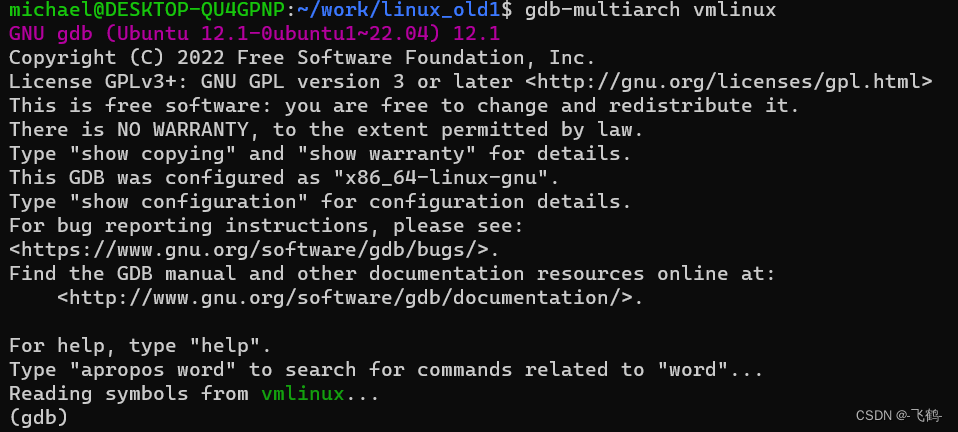
- 启动GDB
进入Kernel源代码目录,执行gdb-multiarch vmlinux。vmlinux是原始的内核elf文件,Image文件则是压缩之后的elf文件。
- 连接远程调试,添加断点函数
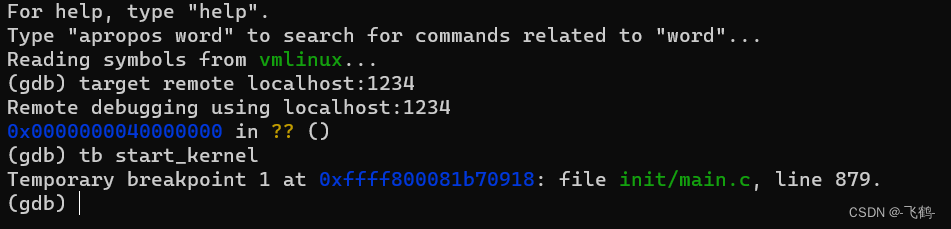
- VSCode调试
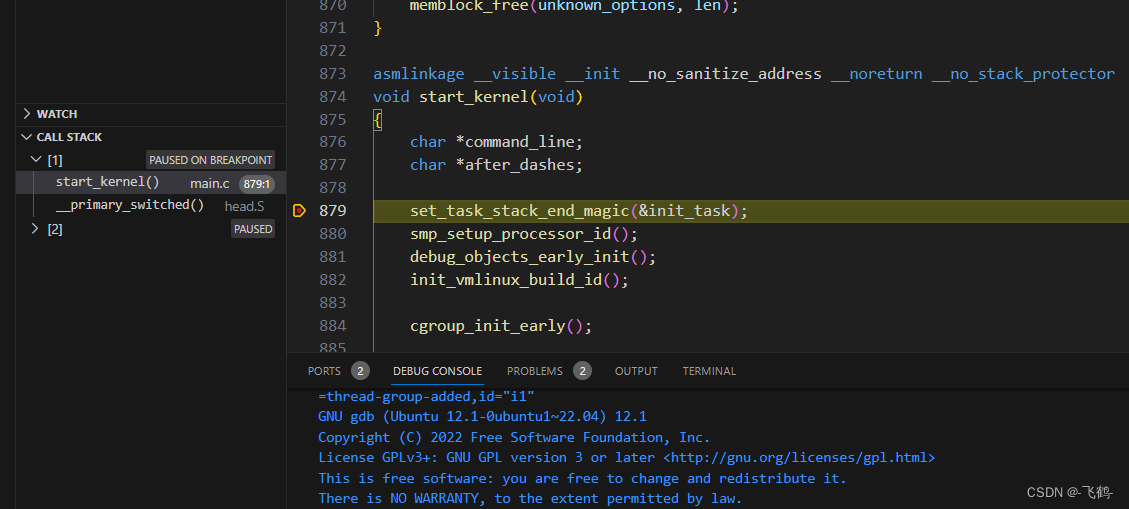
gdb调试不太方便,用VSCode更方便。用VSCode打开Kernel源代码,在.vscode目录添加launch.josn文件,内容如下,然后找到init/main.c的的start_kernel函数下断点,然后按F5启动调试。
{// Use IntelliSense to learn about possible attributes.// Hover to view descriptions of existing attributes.// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "Launch QEMU to debug HelloWorld.elf","type": "cppdbg","request": "launch","program": "${workspaceFolder}/vmlinux","cwd": "${workspaceFolder}","miDebuggerPath": "gdb-multiarch","miDebuggerServerAddress": "localhost:1234","stopAtConnect": true,"stopAtEntry": true,}]
}
4. 扩展QEMU
4.1. 下载代码
开发代码基于qemu 8.2.1版本。
git clone https://gitee.com/mirrors/qemu.git
4.2. 编译
要扩展QEMU的功能,肯定需要用到调试,所以编译时需要打开debug选项,并且可以指定编译的工具来减少编译时间。详细编译配置,参见./configure -help。如下只编译riscv版本。
./configure --target-list=riscv32-softmmu --enable-debug --disable-werror
make -j8
4.3. 添加uart
qemu是默认一块完整的开发板,其模拟的硬件不仅有cpu,还有各种外设。相关代码放在hw目录,uart外设则放 在char目录中。
- 添加uart代码。
cmsdk-apb-uart是mps2主板(支持Cortext-M7)配套的uart,我们将其移植到riscv中来。将cmsdk-apb-uart改为ys_uart。并将函数中的cmsdk-apb-uart也相应修改为ys_uart。 - 添加打印函数
uart中用到的一些函数,是编译时python调用trace-event文件中的相关描述生成的。所以在trace-event中添加:
ys_uart.c
ys_uart_read(uint64_t offset, uint64_t data, unsigned size) “CMSDK APB UART read: offset 0x%” PRIx64 " data 0x%" PRIx64 " size %u"
ys_uart_write(uint64_t offset, uint64_t data, unsigned size) “CMSDK APB UART write: offset 0x%” PRIx64 " data 0x%" PRIx64 " size %u"
ys_uart_reset(void) “CMSDK APB UART: reset”
ys_uart_receive(uint8_t c) “CMSDK APB UART: got character 0x%x from backend”
ys_uart_tx_pending(void) “CMSDK APB UART: character send to backend pending”
ys_uart_tx(uint8_t c) “CMSDK APB UART: character 0x%x sent to backend”
ys_uart_set_params(int speed) “CMSDK APB UART: params set to %d 8N1”
- 编译配置
qemu是采用kconfig配置和meson来编译的,所以需要配置char目录的Kconfig文件,添加:
system_ss.add(when: ‘CONFIG_YS_UART’, if_true: files(‘ys_uart.c’))
Kconfig文件添加
config YS_UART
bool
- 给hw/riscv/virt.c添加自定义的uart
#include "hw/char/ys_uart.h" // 添加头文件// 在函数virt_machine_inti中添加如下代码
DeviceState *dev = qdev_new(TYPE_YS_UART);
SysBusDevice *sbd = SYS_BUS_DEVICE(dev);
qdev_prop_set_chr(dev, "chardev", serial_hd(0));
qdev_prop_set_uint32(dev, "pclk-frq", 25000000);
sysbus_realize_and_unref(sbd, &error_fatal);
sysbus_mmio_map(sbd, 0, 0x40004000);
// 上面的代码为新添加
serial_mm_init(system_memory, memmap[VIRT_UART0].base,0, qdev_get_gpio_in(mmio_irqchip, UART0_IRQ), 399193,serial_hd(1), DEVICE_LITTLE_ENDIAN);
- 修改machine名
将hw/riscv/virt.c、virt.h中的
MACHINE_TYPE_NAME(“virt”),
// 修改为
MACHINE_TYPE_NAME(“ys_virt”), - 代码
相关代码见:https://gitee.com/michael_duan/qemu_riscv.git
4.4. 测试
4.4.1. 固件
#define UART0_ADDRESS (0x40004000UL)
#define UART0_DATA (*(((volatile uint32_t *)(UART0_ADDRESS + 0UL))))
#define UART0_STATE (*(((volatile uint32_t *)(UART0_ADDRESS + 4UL))))
#define UART0_CTRL (*(((volatile uint32_t *)(UART0_ADDRESS + 8UL))))
#define UART0_BAUDDIV (*(((volatile uint32_t *)(UART0_ADDRESS + 16UL))))
#define TX_BUFFER_MASK (1UL)static void InitUart(void)
{UART0_BAUDDIV = 16;UART0_CTRL = 1;
}
/*-----------------------------------------------------------*/static int UartWrite(char *pcString, int iStringLength)
{int iNextChar;/* Output the formatted string to the UART. */for (iNextChar = 0; iNextChar < iStringLength; iNextChar++){while ((UART0_STATE & TX_BUFFER_MASK) != 0){}UART0_DATA = *pcString;pcString++;}return iStringLength;
}int main(void)
{InitUart();UartWrite("Hello World!\n", 13);while (1){/* code */}
}4.4.2. 调试
调试qemu,利用VSCode更,在.vscode目录中添加launch.json文件,添加如下内容:
{"version": "0.2.0","configurations": [{"name": "Debug","type": "cppdbg","request": "launch","args": ["-machine", "ys_virt", "-serial", "stdio", "-nodefaults", "-bios", "none", "-smp", "1", "-nographic", "-kernel", "e:\\HelloWorld_riscv.elf"],"cwd": "${workspaceFolder}","environment": [],"externalConsole": false,"stopAtEntry": false,"windows": {"MIMode": "gdb","miDebuggerPath": "C:\\msys64\\mingw64\\bin\\gdb.exe","program": "${workspaceFolder}\\build\\qemu-system-riscv32.exe",},}]
}在\system\main.c的int main(int argc, char **argv)处添加断点,按F5调试,显示如下:

4.4.3. 验证
./build/qemu-system-riscv32.exe -machine ys_virt -serial stdio -nodefaults -bios none -kernel /e/HelloWorld_riscv.elf -nographic

相关文章:
QEMU开发入门
1. 简介 QEMU(Quick EMUlator)是一个开源的虚拟化软件,它能够模拟多种硬件平台,并在这些平台上运行各种操作系统。QEMU可以在不同的主机架构之间进行虚拟化,例如x86、ARM、PowerPC、Risc-V等。QEMU是一个功能强大且灵…...
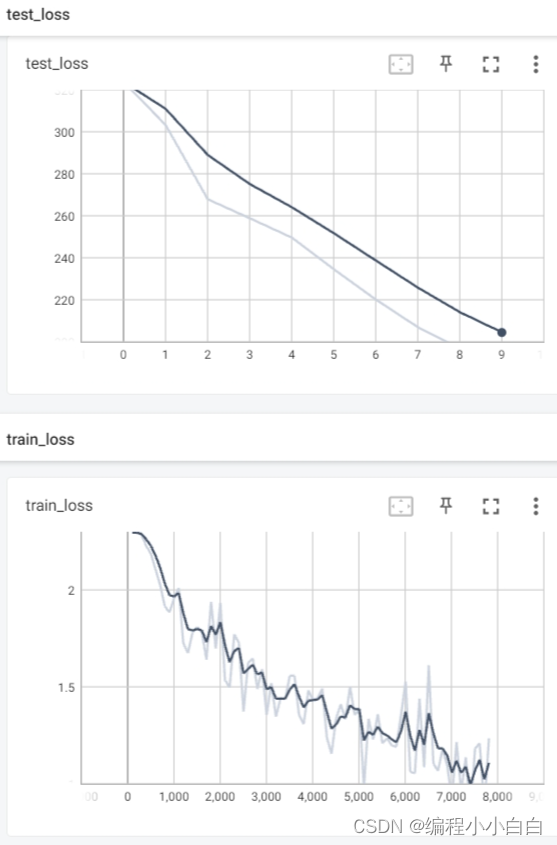
10-pytorch-完整模型训练
b站小土堆pytorch教程学习笔记 一、从零开始构建自己的神经网络 1.模型构建 #准备数据集 import torch import torchvision from torch.utils.tensorboard import SummaryWriterfrom model import * from torch.utils.data import DataLoadertrain_datatorchvision.datasets.…...
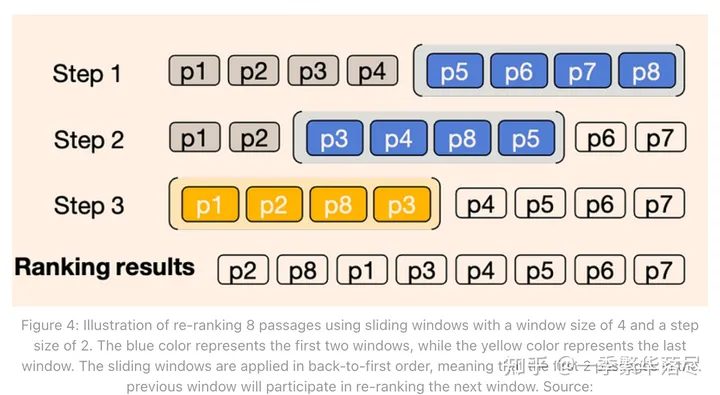
高级RAG:重新排名,从原理到实现的两种主流方法
原文地址:https://pub.towardsai.net/advanced-rag-04-re-ranking-85f6ae8170b1 2024 年 2 月 14 日 重新排序在检索增强生成(RAG)过程中起着至关重要的作用。在简单的 RAG 方法中,可以检索大量上下文,但并非所有上下…...
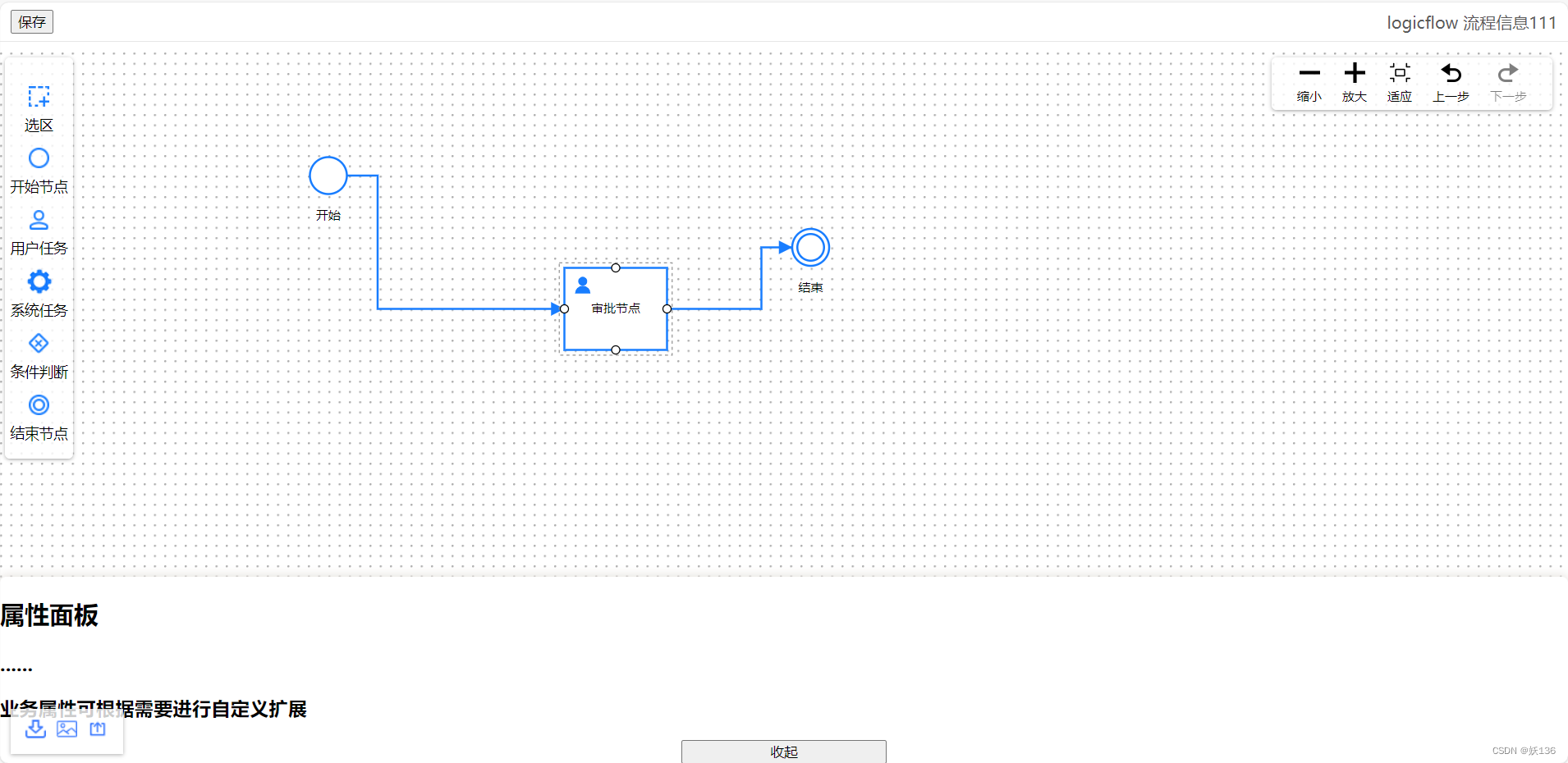
使用logicflow流程图实例
一.背景 需要使用流程引擎开发项目,没有使用flowable、activiti这类的国外流程引擎,想使用国内的引擎二次开发,缺少单例模式的流程画图程序,都是vue、react、angluer的不适合,从网上找了antx6、logicflow、bpmn.js。感…...

Stable Diffusion 绘画入门教程(webui)-ControlNet(IP2P)
上篇文章介绍了深度Depth,这篇文章介绍下IP2P(InstructP2P), 通俗理解就是图生图,给原有图加一些效果,比如下图,左边为原图,右边为增加了效果的图: 文章目录 一、选大模型二、写提示词三、基础参…...
)
五力分析(Porter‘s Five Forces)
五力分析是一种用于评估竞争力的框架,由哈佛商学院教授迈克尔波特(Michael Porter)提出。它通过分析一个行业的五个关键力量(竞争对手、供应商、顾客、替代品和新进入者)来评估一个企业或行业的竞争环境。这个框架可以…...
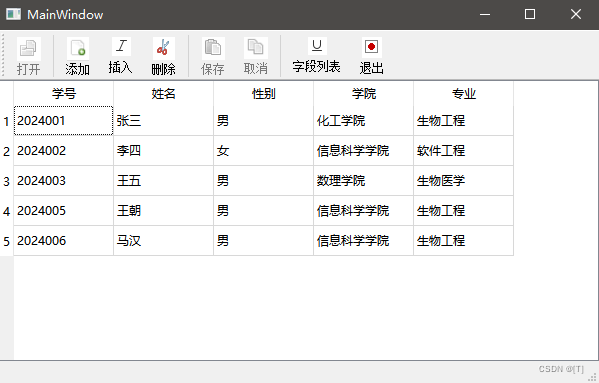
十一、Qt数据库操作
一、Sql介绍 Qt Sql模块包含多个类,实现数据库的连接,Sql语句的执行,数据获取与界面显示,数据与界面直接使用Model/View结构。1、使用Sql模块 (1)工程加入 QT sql(2)添加头文件 …...
【Spring】IoC容器 控制反转 与 DI依赖注入 XML实现版本 第二期
文章目录 基于 XML 配置方式组件管理前置 准备项目一、 组件(Bean)信息声明配置(IoC):1.1 基于无参构造1.2 基于静态 工厂方法实例化1.3 基于非静态 工厂方法实例化 二、 组件(Bean)依赖注入配置…...
神经网络系列---感知机(Neuron)
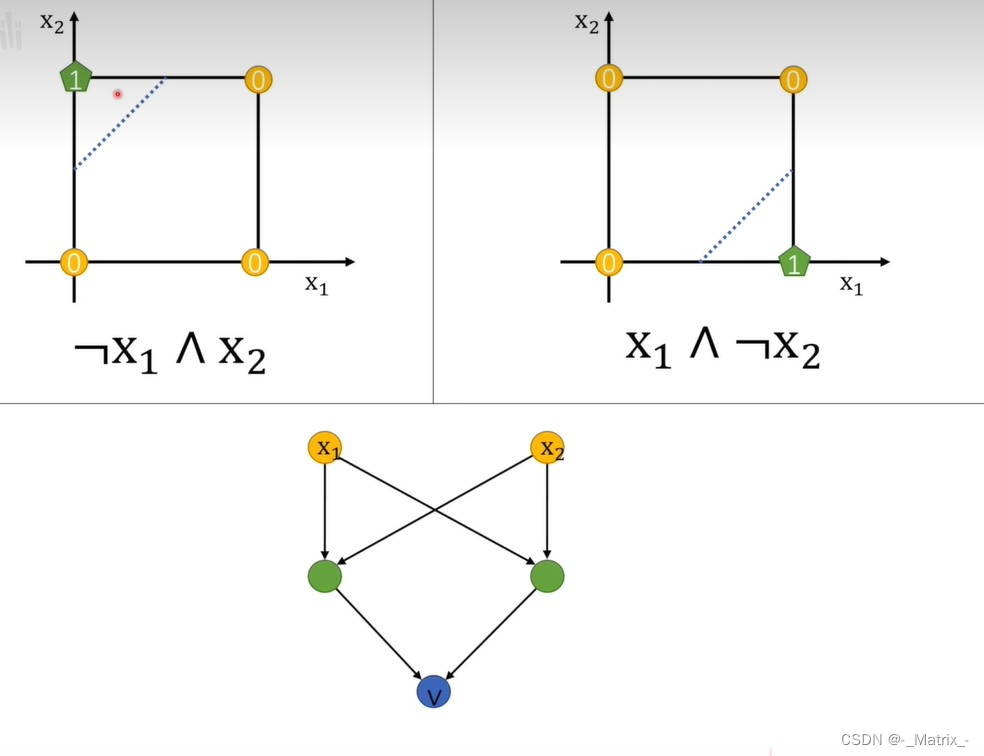
文章目录 感知机(Neuron)感知机(Neuron)的决策函数可以表示为:感知机(Neuron)的学习算法主要包括以下步骤:感知机可以实现逻辑运算中的AND、OR、NOT和异或(XOR)运算。 感知机(Neuron) 感知机(Neuron)是一种简单而有效的二分类算法,用于将输入…...

k8s(2)
目录 一.二进制部署k8s 常见的K8S安装部署方式: k8s部署 二进制与高可用的区别 二.部署k8s 初始化操作: 每台node安装docker: 在 master01 节点上操作; 准备cfssl证书生成工具:: 执行脚本文件: 拉入etcd压缩包…...
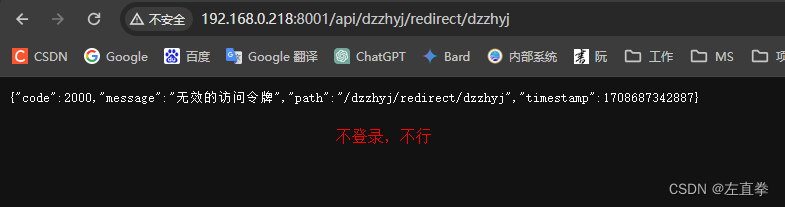
利用nginx内部访问特性实现静态资源授权访问
在nginx中,将静态资源设为internal;然后将前端的静态资源地址改为指向后端,在后端的响应头部中写上静态资源地址。 近期客户对我们项目做安全性测评,暴露出一些安全性问题,其中一个是有些静态页面(*.html&…...
fly-barrage 前端弹幕库(1):项目介绍
fly-barrage 是我写的一个前端弹幕库,由于经常在 Bilibili 上看视频,所以对网页的弹幕功能一直蛮感兴趣的,所以做了这个库,可以帮助前端快速的实现弹幕功能。 项目官网地址:https://fly-barrage.netlify.app/ÿ…...

jetcache如果一个主体涉及多个缓存时编辑或者删除时如何同时失效多个缓存
在实际使用过程中,可能会遇到这种情形:一个主体会有多个缓存,比如用户基础信息缓存、用户详情缓存,那么当删除用户信息后就需要同时失效多个缓存中该主体数据,那么jetcache支持这种应用场景么,答案是支持&a…...

uni-app 实现拍照后给照片加水印功能
遇到个需求需要实现,研究了一下后写了个demo 本质上就是把拍完照后的照片放到canvas里,然后加上水印样式然后再重新生成一张图片 代码如下,看注释即可~使用的话记得还是得优化下代码 <template><view class"content"&g…...

【ArcGIS】利用DEM进行水文分析:流向/流量等
利用DEM进行水文分析 ArcGIS实例参考 水文分析通过建立地表水文模型,研究与地表水流相关的各种自然现象,在城市和区域规划、农业及森林、交通道路等许多领域具有广泛的应用。 ArcGIS实例 某流域30m分辨率DEM如下: (1)…...

论文阅读笔记——PathAFL:Path-Coverage Assisted Fuzzing
文章目录 前言PathAFL:Path-Coverage Assisted Fuzzing1、解决的问题和目标2、技术路线2.1、如何识别 h − p a t h h-path h−path?2.2、如何减少 h − p a t h h-path h−path的数量?2.3、哪些h-path将被添加到种子队列?2.4、种…...

C语言中各种运算符用法
C语言中有许多不同的运算符,用于执行各种不同的操作。 以下是C语言中常见的运算符及其用法: 算术运算符: 加法运算符():用于将两个值相加。减法运算符(-):用于将一个值减…...
pythonJax小记(五):python: 使用Jax深度图像(正交投影和透视投影之间的转换)(持续更新,评论区可以补充)
python: 使用Jax深度图像(正交投影和透视投影之间的转换) 前言问题描述1. 透视投影2. 正交投影 直接上代码解释1. compute_projection_parameters 函数a. 参数解释b. 函数计算 2. ortho_to_persp 函数a. 计算投影参数:b. 生成像素坐标网格&am…...
web安全学习笔记【16】——信息打点(6)
信息打点-语言框架&开发组件&FastJson&Shiro&Log4j&SpringBoot等[1] #知识点: 1、业务资产-应用类型分类 2、Web单域名获取-接口查询 3、Web子域名获取-解析枚举 4、Web架构资产-平台指纹识别 ------------------------------------ 1、开源-C…...
145.二叉树的后序遍历
// 定义一个名为Solution的类,用于解决二叉树的后序遍历问题 class Solution { // 定义一个公共方法,输入是一个二叉树的根节点,返回一个包含后序遍历结果的整数列表 public List<Integer> postorderTraversal(TreeNode root) { /…...

对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性 在个人开发项目中接入大模型时,开发者通常面临一个选择&am…...

3倍效率提升:Gofile批量下载工具实战指南
3倍效率提升:Gofile批量下载工具实战指南 【免费下载链接】gofile-downloader Download files from https://gofile.io 项目地址: https://gitcode.com/gh_mirrors/go/gofile-downloader 您是否曾为Gofile平台的文件下载效率低下而烦恼?当面对大文…...

AI智能体记忆系统设计:从RAG到长期记忆的工程实践
1. 项目概述:从“记忆”到“智能”的跨越在AI智能体(Agent)的开发浪潮中,我们常常面临一个核心挑战:如何让智能体在复杂的、多轮次的交互中,表现得像一个真正有“记忆”和“经验”的专家?传统的…...

Ash印相渲染失败率骤升47%?紧急预警:V6.2更新后Gamma 2.2→2.4迁移引发的印相断层危机
更多请点击: https://intelliparadigm.com 第一章:Ash印相渲染失败率骤升47%的全局现象与危机定性 近期,全球多个采用 Ash 印相引擎(v3.8.2)的影像处理平台集中报告渲染任务异常终止、输出空白或超时中断。监控数据显…...

ARM Cortex-X4/X925处理器仿真模型与指令集详解
1. ARM Cortex-X4/X925处理器仿真模型概述处理器仿真模型在现代芯片设计中扮演着至关重要的角色,特别是在Arm架构的生态系统中。作为Arm最新一代高性能核心,Cortex-X4和X925的Iris仿真组件提供了完整的指令集和微架构行为建模,使开发者能够在…...

基于MCP与Apify构建AI驱动的投资另类数据研究工具
1. 项目概述:当投资研究遇上AI代理如果你是一名量化研究员、对冲基金分析师,或者只是一个对金融市场充满好奇、希望用数据驱动决策的独立投资者,那么你肯定对“另类数据”这个词不陌生。传统的财报、股价、宏观经济指标,这些“传统…...

云原生安全工具:保护云原生环境
云原生安全工具:保护云原生环境 一、云原生安全工具概述 1.1 云原生安全工具的定义 云原生安全工具是指专为云原生环境设计的安全工具和解决方案。它们用于保护容器、Kubernetes集群、微服务和Serverless应用的安全。 1.2 云原生安全工具的价值 安全防护:…...

模拟WiFi反向散射技术:无电池物联网通信新突破
1. 项目概述:模拟WiFi反向散射技术的革新突破在物联网设备爆炸式增长的今天,电池续航已成为制约大规模部署的关键瓶颈。传统传感器节点即使采用低功耗设计,其电池寿命也鲜有超过3-5年。而Leggiero提出的模拟WiFi反向散射技术,则开…...
)
Cesium动态泛光效果实战:手把手教你用d3kit插件打造炫酷城市光效(附完整代码)
Cesium动态泛光效果实战:手把手教你用d3kit插件打造炫酷城市光效(附完整代码) 当夜幕降临,城市天际线被霓虹灯勾勒出流动的轮廓,这种视觉冲击力正是现代三维可视化项目的灵魂所在。本文将带你用d3kit这个轻量级插件&am…...

基于Python与Playwright的招聘信息自动化聚合与智能筛选工具实践
1. 项目概述:一个面向求职者的自动化信息聚合与投递工具最近在和一些做开发的朋友聊天,发现大家普遍有个痛点:找工作太费时间了。每天要在几个招聘App之间来回切换,重复筛选岗位、刷新列表、投递简历,机械性的操作占据…...