Win系统蓝牙设备频繁卡顿/断连 - 解决方案
Win系统蓝牙设备频繁卡顿/断连 - 解决方案
- 前言
- 常见网卡
- Intel无线网卡(推荐)
- Realtek无线网卡
- 总结
- 查看本机网卡
- 解决方案
- 更新驱动
- 更换网卡(推荐)
前言
无线网卡有2个模块,一个是WiFi,一个是蓝牙,因此蓝牙问题可能和无线网卡有关。在某些情况下,例如高温或WiFi速率过高,会导致蓝牙频繁卡顿/断连。解决方法分为2种,1是更新驱动,2是更换无线网卡。
常见网卡
Intel无线网卡(推荐)
常见型号有AX200、AX210等等。AX200支持WiFi 6,AX210支持WiFi 6E。笔记本Intel AX210网卡如下图所示。该类型网卡性能较好,兼容性强,WiFi和蓝牙的稳定性也高,但价格也较高。

Realtek无线网卡
Realtek网卡,中文名称瑞昱网卡,也叫螃蟹网卡。由于早期该网卡图标是一个螃蟹,如下图,螃蟹网卡的称号由此而来。该类型的网卡WiFi和蓝牙可能会相互干扰,同时连接稳定性也较低,但由于造价较低,常被各个电脑厂商作为电脑的默认无线网卡进行组装。
总结
Intel无线网卡性能和稳定性比Realtek无线网卡好,但价格也更高。若对WiFi和蓝牙有较高需求,例如使用蓝牙键盘或蓝牙耳机,强烈建议选择Intel无线网卡。若对WiFi和蓝牙没有使用要求,例如使用有线键盘和有线耳机,可以选择Realtek无线网卡,但不推荐,毕竟好网卡可以以备不时之需。
查看本机网卡
以Win10为例,打开控制面板的设备管理器,选择网络适配器,在列表中可以查看本机显卡的型号。
示例
Intel AX200无线网卡:
Realtek 8822CE无线网卡:
解决方案
更新驱动
使用360驱动大师更新驱动。
或者到无线网卡的官网下载最新驱动并安装。
若更新驱动后,问题仍然存在,则可能是硬件本身的问题,不考虑蓝牙设备本身(如蓝牙键盘,蓝牙耳机)的问题,则为无线网卡的问题。若网卡型号为Realtek,则建议更换为Intel网卡。更换网卡详情请见下一章节。
更换网卡(推荐)
若网卡型号为Realtek,则建议更换为Intel网卡。更换网卡前建议先下载好网卡驱动,值得一提的是,Intel无线网卡的驱动都是通用的,直接下载最新版即可。
Intel无线网卡驱动下载:
WiFi驱动
蓝牙驱动
更换无线网卡步骤,以笔记本电脑为例,台式机类似:
- 拆开笔记本电脑背板。
- 切断电池排线(可忽略)。
- 断开无线网卡天线。
- 使用螺丝刀拆下无线网卡。
- 安装无线网卡。
- 安装网卡天线。
- 使用固定卡扣固定天线接口。
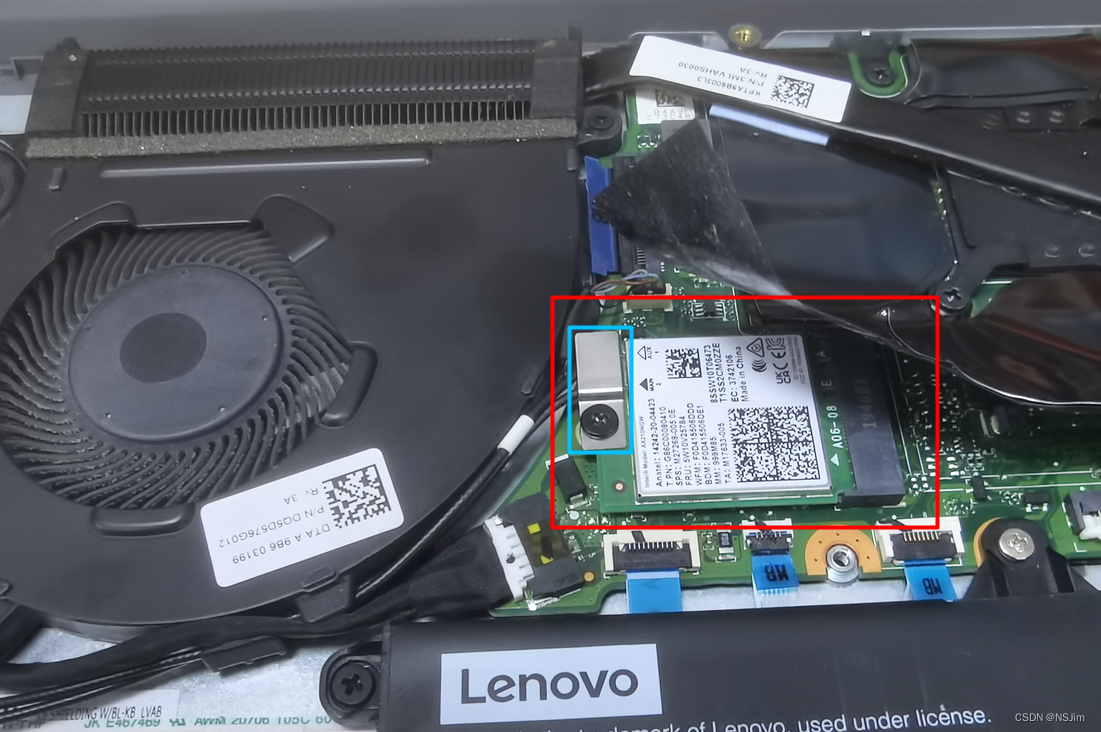
安装好后如下图,其中红框为无线网卡,蓝框为天线固定卡扣:
更换为Intel无线网卡并安装驱动后,以下问题都可以得到解决。
- 蓝牙设备频繁卡顿,尤其是蓝牙耳机。
- 使用WiFi下载/上传速度高于阈值导致蓝牙频繁卡顿/断连。
- 网卡温度过高导致蓝牙频繁卡顿/断连。
- WiFi和蓝牙相互干扰。
- 华为电脑管家通过超级终端无法搜索到华为设备。
相关文章:
Win系统蓝牙设备频繁卡顿/断连 - 解决方案
Win系统蓝牙设备频繁卡顿/断连 - 解决方案前言常见网卡Intel无线网卡(推荐)Realtek无线网卡总结查看本机网卡解决方案更新驱动更换网卡(推荐)前言 无线网卡有2个模块,一个是WiFi,一个是蓝牙,因…...
Git学习入门(2)- 基本命令操作总结
个人博客:我的个人博客,各位大佬来玩1 创建 git仓库1.1 从现有工作目录中初始化新仓库需要到你需要用git管理的项目中输入以下命令:git init便会创建一个空的git项目,并且当前目录下会出现一个名为 .git 的目录, Git 需…...

SPringCloud:Nacos快速入门及相关属性配置
目录 一、Nacos快速入门 1、在父工程中添加spring-cloud-alilbaba的管理依赖 2、如果有使用eureka依赖,将其注释 3、添加nacos的客户端依赖 4、修改yml文件,注释eureka配置 5、启动测试 二、Nacos相关属性配置 1、Nacos服务分级存储 2、根据集群…...
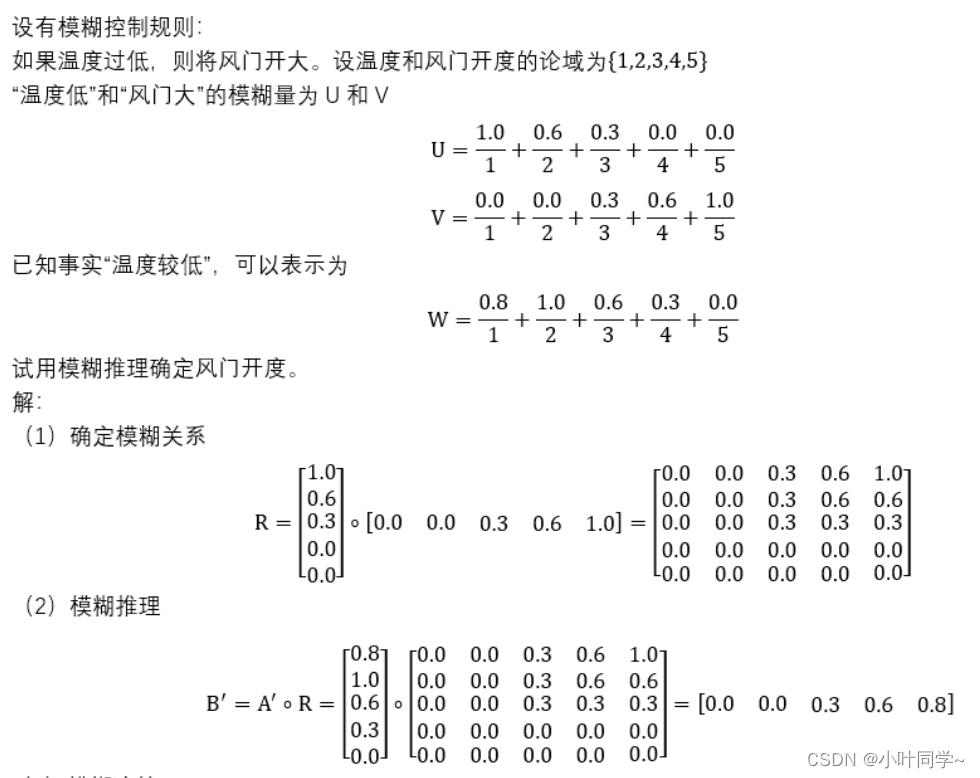
医疗器械之模糊算法(嵌入式部分)
模糊控制 所谓模糊控制,就是对难以用已有规律描述的复杂系统,采用自然语言(如大,中,小)加以描述,借助定性的,不精确的以及模糊的条件语句来表达,模糊控制是一种基于语言的…...
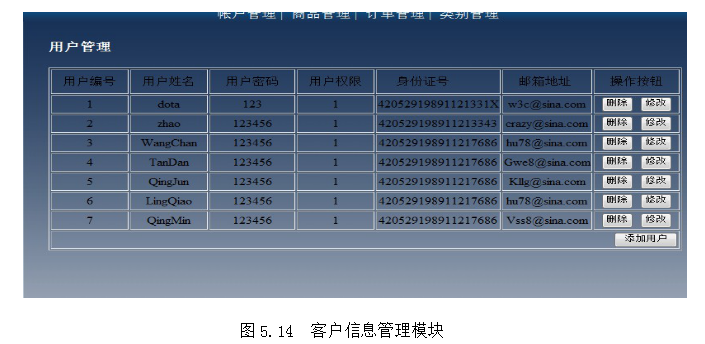
网上销售笔记本系统
技术:Java、JSP等摘要:本文讲述了基于B/S模式的笔记本电脑在线销售系统的设计与实现。所谓的笔记本电脑在线销售系统是通过网站推广互联企业的笔记本电脑和技术服务,并使客户随时可以了解企业和企业的产品,为客户提供在线服务和订…...
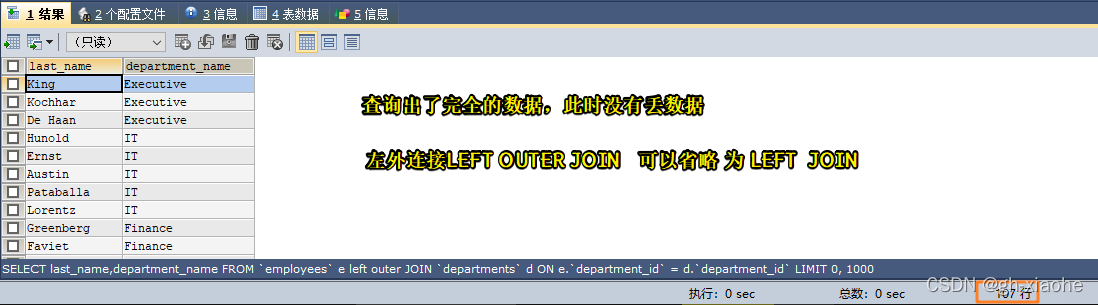
MySQL基础查询操作
文章目录🚏 Select语句🚀 一、SQL底层执行原理🚬 (一)、查询的结构🚬 (二)、SQL语句的执行过程🚭 1、WHERE 为什么不包含聚合函数的过滤条件?(面试…...

English Learning - L2 语音作业打卡 小元音 [ʌ] [ɒ] Day9 2023.3.1 周三
English Learning - L2 语音作业打卡 小元音 [ʌ] [ɒ] Day9 2023.3.1 周三💌发音小贴士:💌当日目标音发音规则/技巧:🍭 Part 1【热身练习】🍭 Part2【练习内容】🍭【练习感受】🍓元音 [ʌ]&…...
Condition 源码解读
一、Condition 在并发情况下进行线程间的协调,如果是使用的 synchronized 锁,我们可以使用 wait/notify 进行唤醒,如果是使用的 Lock 锁的方式,则可以使用 Condition 进行针对性的阻塞和唤醒,相较于 wait/notify 使用…...
看完这篇入门性能测试
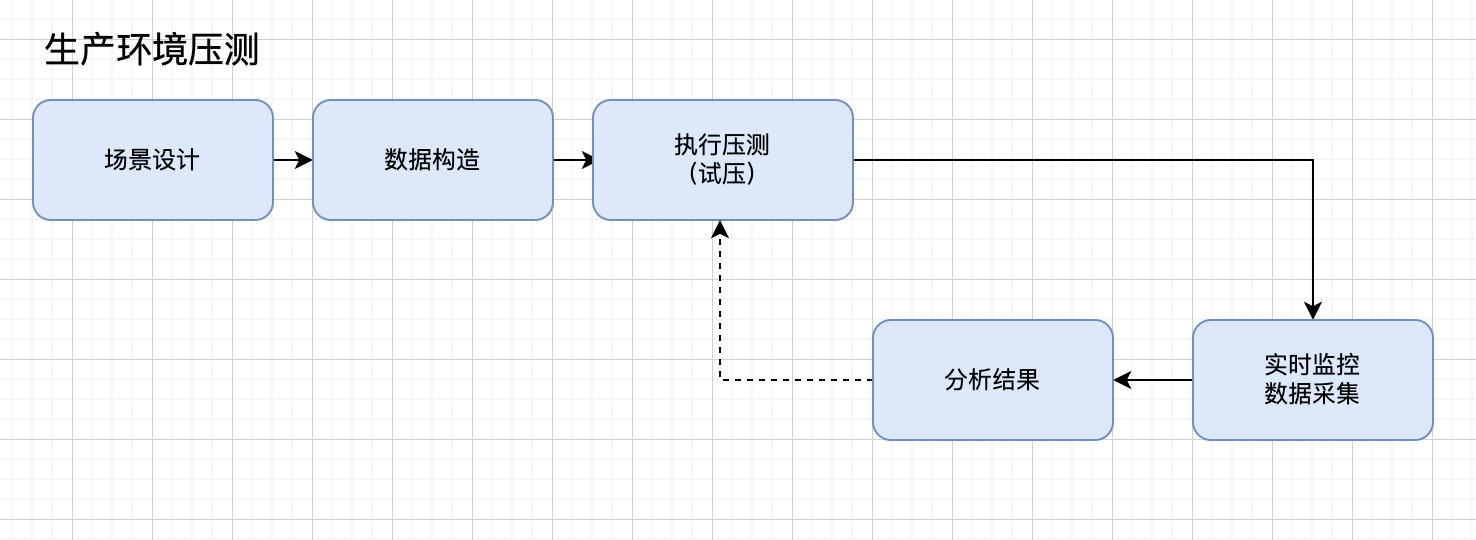
大家好,我是洋子。最近组内在进行服务端高并发接口的性能压测工作,起因是2023年2月2日,针对胡某宇事件进行新闻发布会直播,几十万人同时进入某媒体直播间,造成流量激增 从监控上可以看出,QPS到达某峰值后&…...

推导部分和——带权并查集
题解: 带权并查集 引言: 带权并查集是一种进阶的并查集,通常,结点i的权值等于结点i到根节点的距离,对于带权并查集,有两种操作需要掌握——Merge与Find,涉及到路径压缩与维护权值等技巧。 带…...
费解的开关/翻硬币
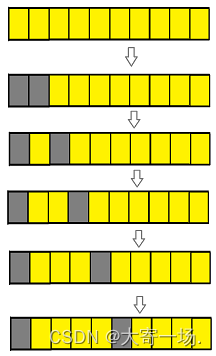
🌱博客主页:大寄一场. 🌱系列专栏: 算法 😘博客制作不易欢迎各位👍点赞⭐收藏➕关注 题目:费解的开关 你玩过“拉灯”游戏吗? 25盏灯排成一个 55 的方形。 每一个灯都有一个开关&…...
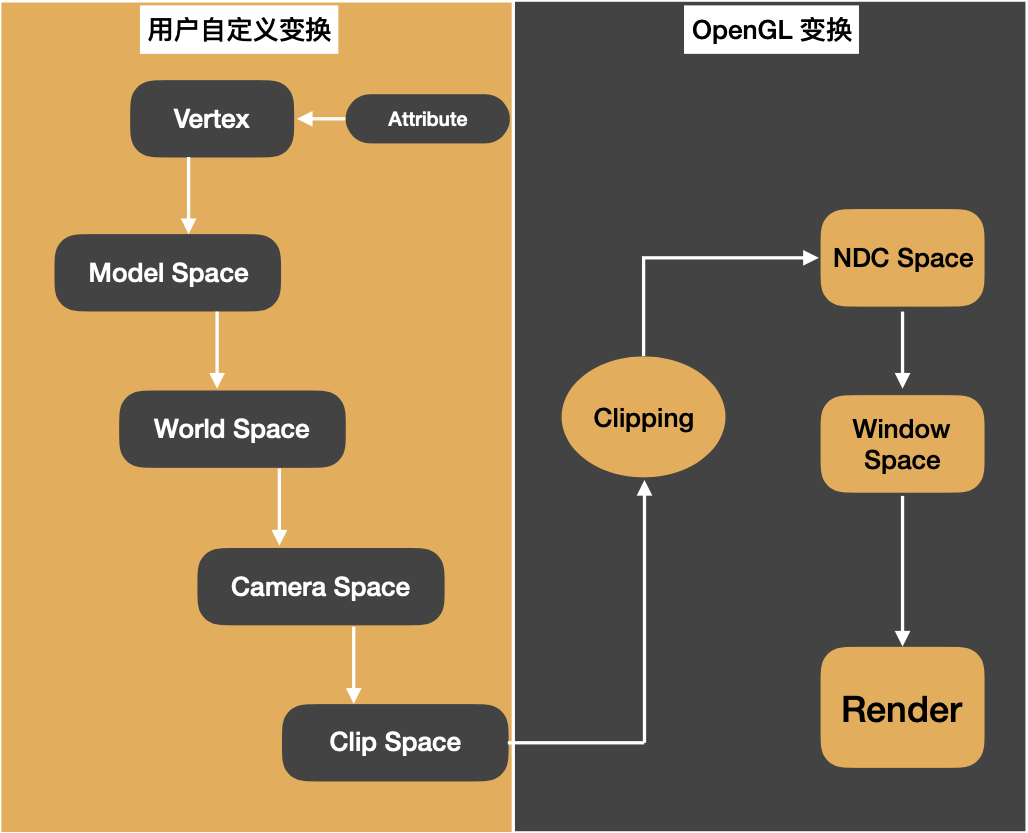
OpenGL中的坐标系
1、2D笛卡尔坐标系2D笛卡尔坐标系跟我们高中的时候学习的坐标系一样,是由x、y决定的。2、3D笛卡尔坐标系3D笛卡尔坐标系坐标由x、y、z决定,满足右手定则。3、视口glViewport(GLint x,GLint y,GLsizei width,GLsizei height)窗口和视口大小可以相同&#…...
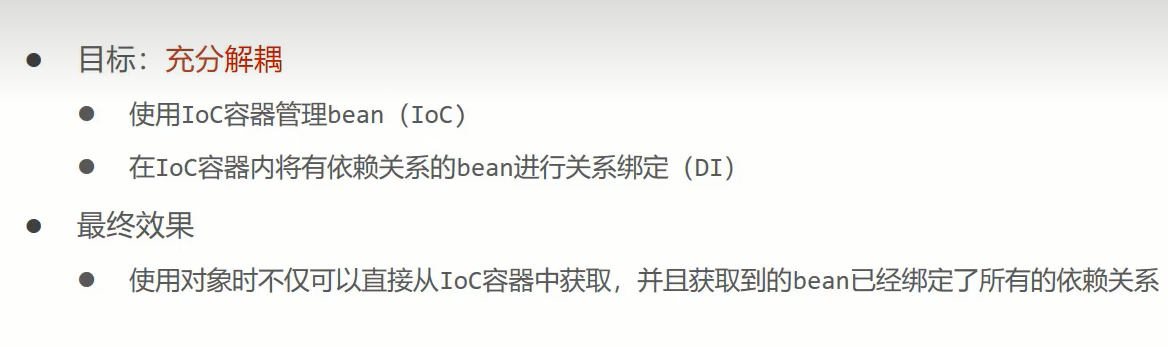
Spring——Spring介绍和IOC相关概念
Spring是以Spring Framework为核心,其余的例如Spring MVC, Spring Cloud,Spring Data,Spring Security SpringBoot的基础都是Spring Framework。 Spring Boot可以在简化开发的基础上加速开发。 Spring Cloud分布式开发 Spring有…...

A+B Problem
AB Problem 题目描述 输入两个整数 a,ba, ba,b,输出它们的和(∣a∣,∣b∣≤109|a|,|b| \le {10}^9∣a∣,∣b∣≤109)。 注意 Pascal 使用 integer 会爆掉哦!有负数哦!C/C 的 main 函数必须是 int 类型,…...
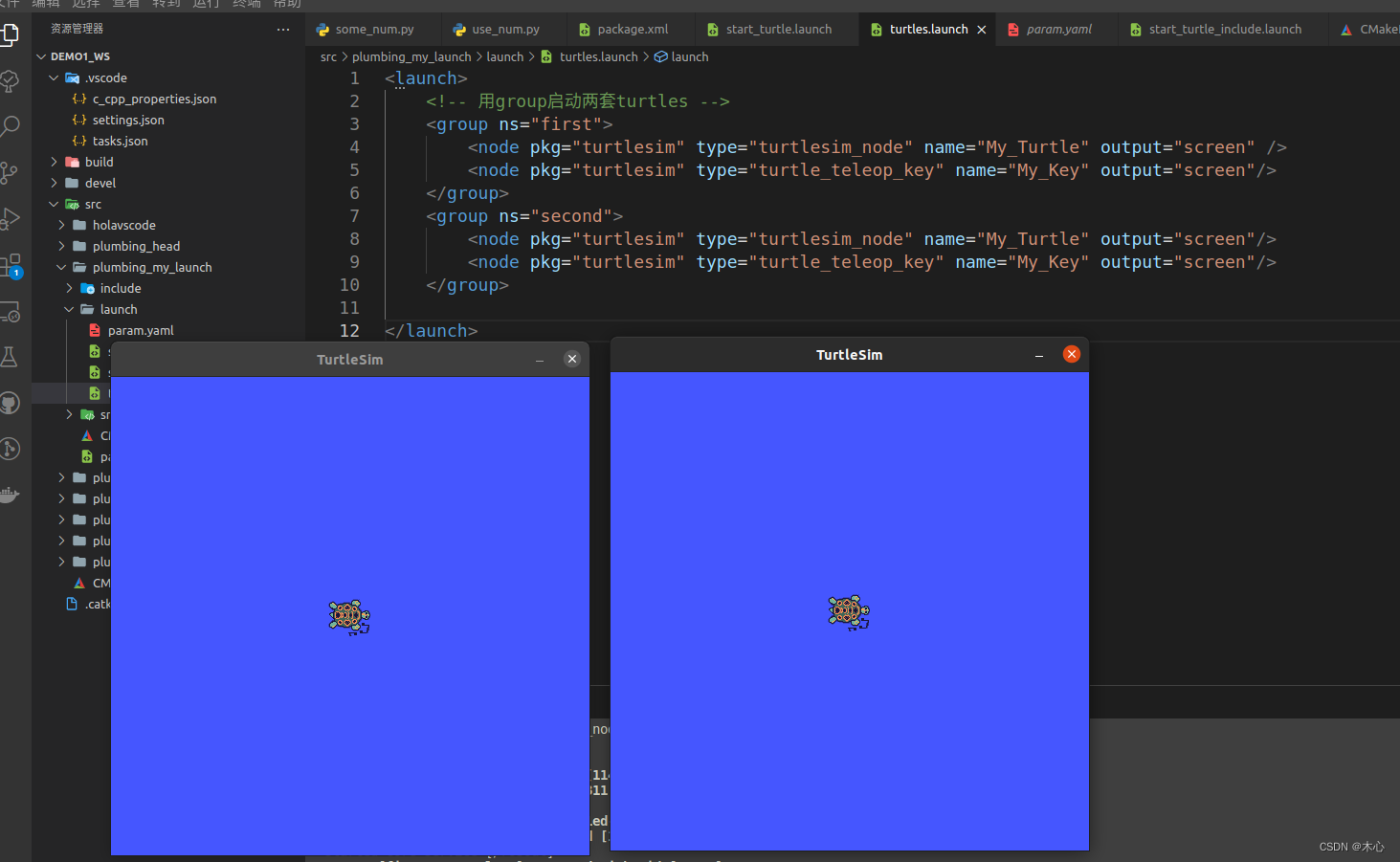
【ROS学习笔记11】ROS元功能包与launch文件的使用
【ROS学习笔记11】ROS元功能包与launch文件的使用 文章目录【ROS学习笔记11】ROS元功能包与launch文件的使用前言一、ROS元功能包二、ROS节点运行管理launch文件2.1 launch文件标签之launch2.2 launch文件标签之node2.3 launch文件标签之include2.4 launch文件标签之remap2.5 l…...

【python】
print函数 同时输出多行变量 print(a, b, sep\n) (23条消息) python3 中print函数参数详解,print(*values, sep , end\n, filesys.stdout, flushFalse)中参数介绍_sep,_phantom-dapeng的博客-CSDN博客 input() 输入浮点数,不能用int(input()) int()…...
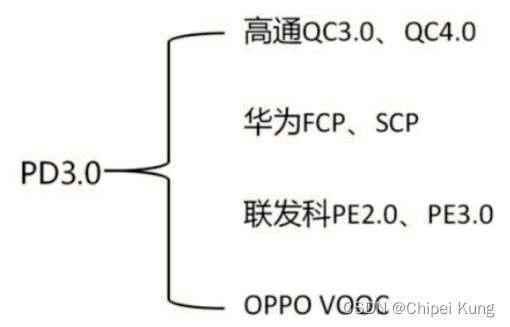
充电协议: 快充协议,如何选充电宝?
快充协议(存在两种:电压; 电流) 目前市面上的快充技术大多遵循2个技术方向: 以高通QC、联发科PEP、华为FCP为首的高压低电流快充技术; 另一种就是以OPPO的VOOC以及华为SCP为首的低电压大电流快充技术。 目前常见的快充标准还有三星AFC、联发…...
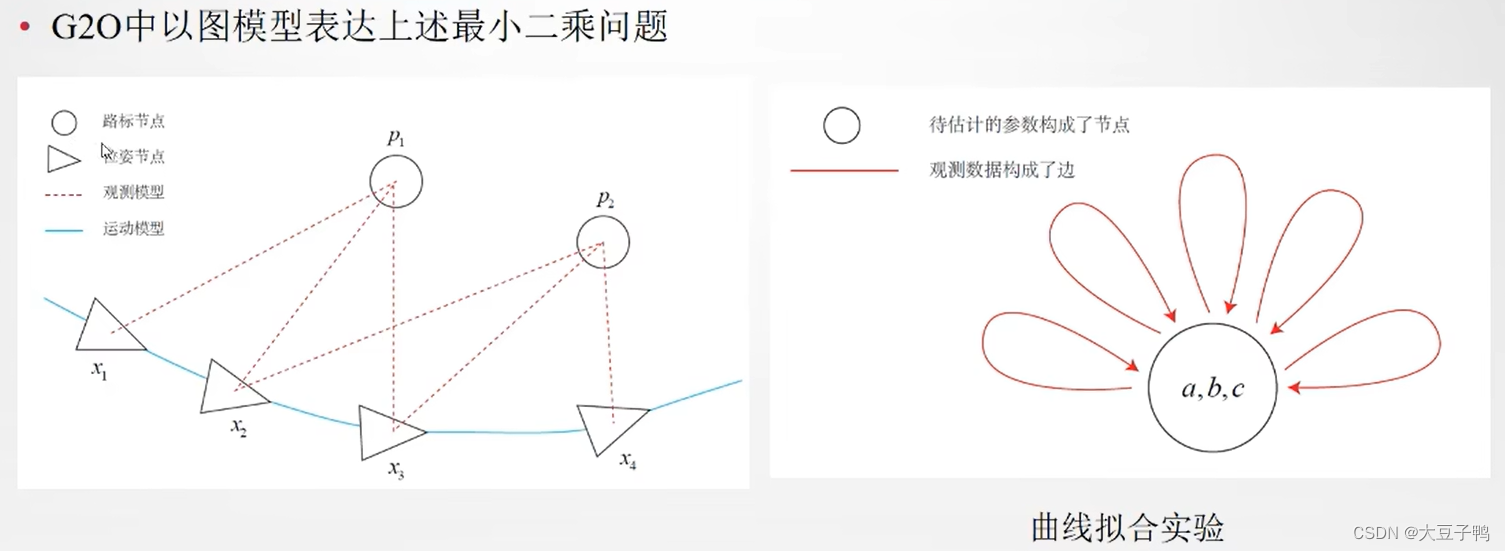
视觉SLAM十四讲ch6 非线性优化笔记
视觉SLAM十四讲ch6 非线性优化笔记本讲目标上讲回顾状态估计问题非线性最小二乘Gauss-Newton:高斯牛顿Levenburg-Marquadt:列文伯格-马夸尔特小结实践:CERES实践:G2O本讲目标 理解最小二乘法的含义和处理方式。 理解Gauss-Newton…...

Nikto工具使用指南
NiktoNikto是一款开源网站服务器扫描器,使用Perl开发,可以对服务器进行全面扫描,包括6400多个潜在危险的文件/cgi(通用网关接口(Common Gateway Interface)),废话不多说,直接上命令:基本测试&am…...
Git(4)之基本工具
Git基础之基本工具 Author:onceday date:2023年3月5日 满满长路有人对你微笑过嘛… windows安装可参考文章:git简易配置_onceday_CSDN博客 參考文档: 《progit2.pdf》,Progit2 Github。《git-book.pdf》 文章目录…...

【ProtoBuf 实战训练】网络版通讯录
文章目录1. 通讯录 4.0 实现(网络版)2. 环境搭建2.1 搭建服务端2.2 搭建客户端2.3 运行结果3. 新增联系人功能3.1 协议约定3.2 协议接口定义 (.proto)3.2.1 AddContactRequest(请求消息)3.2.2 AddContactResponse(响应…...

Qwen3-ASR性能优化:基于CNN的语音特征提取技术
Qwen3-ASR性能优化:基于CNN的语音特征提取技术 语音识别技术发展到今天,已经不再是实验室里的新奇玩具,而是我们日常生活中随处可见的实用工具。从手机语音助手到会议记录软件,从智能家居控制到车载语音交互,语音识别…...

Kandinsky-5.0-I2V-Lite-5s惊艳效果展示:古风人物图→衣袖飘动+发带飞扬动态视频
Kandinsky-5.0-I2V-Lite-5s惊艳效果展示:古风人物图→衣袖飘动发带飞扬动态视频 1. 模型效果震撼开场 想象一下,你有一张精美的古风人物插画,画中女子衣袂飘飘、发带轻扬。现在,只需一个简单的操作,就能让这幅静态画…...

实战踩坑记录:用Cesium控制无人机飞行轨迹,Entity的HPR姿态更新那些‘坑’
实战踩坑记录:用Cesium控制无人机飞行轨迹,Entity的HPR姿态更新那些‘坑’ 在数字孪生和飞行模拟领域,精确控制无人机或其他飞行器的三维姿态一直是个技术难点。最近接手了一个无人机航迹回放项目,需要根据预设航点动态调整无人机…...

**遗传算法在路径优化中的创新应用:从理论到Python实战**在智能优化领域,**遗传算法(Genetic A
遗传算法在路径优化中的创新应用:从理论到Python实战 在智能优化领域,遗传算法(Genetic Algorithm, GA) 凭借其强大的全局搜索能力和对复杂问题的适应性,成为解决组合优化问题的重要工具。本文将深入探讨如何使用 Pyth…...

终极指南:深入理解Wing语言Preflight和Inflight执行阶段
终极指南:深入理解Wing语言Preflight和Inflight执行阶段 【免费下载链接】wing A programming language for the cloud ☁️ A unified programming model, combining infrastructure and runtime code into one language ⚡ 项目地址: https://gitcode.com/gh_mi…...

4月,新一轮发票抽奖,请收好这份开具发票指南!!
4月,重庆发票抽奖新的一轮发票抽奖已经了(目前第三轮)。你所在的城市不知道是不是也是第三期发票抽奖了。发票抽奖首先需要发票。发票除了线下直接找商家开具外,我们也可以在线上直接开具。这份发票开具指南,归纳总结我…...

SEO_避开常见SEO误区,让你的优化更高效
SEO误区:避开常见陷阱,让你的优化更高效 在当前互联网营销的环境中,搜索引擎优化(SEO)是一个至关重要的环节。无论你是一个新手还是有一些经验的网站管理者,都会遇到各种各样的SEO误区。这些误区不仅可能浪…...

别再写重复代码了!微信小程序分页加载与下拉刷新,一个通用组件就搞定
微信小程序分页加载与下拉刷新的工程化实践 每次开发新页面时,你是否还在重复编写分页加载和下拉刷新的逻辑?作为一个有追求的小程序开发者,我们需要思考如何将这些通用功能抽象成可复用的组件或Mixin。本文将带你从工程化角度,设…...

SecGPT-14B批量处理:用OpenClaw自动化1000个网站安全检测
SecGPT-14B批量处理:用OpenClaw自动化1000个网站安全检测 1. 为什么需要自动化安全检测 作为一名长期关注网络安全的技术从业者,我经常需要对大量网站进行安全检测。传统的手动检测方式不仅效率低下,而且容易遗漏关键漏洞。最近在测试SecGP…...