Condition 源码解读
一、Condition
在并发情况下进行线程间的协调,如果是使用的 synchronized 锁,我们可以使用 wait/notify 进行唤醒,如果是使用的 Lock 锁的方式,则可以使用 Condition 进行针对性的阻塞和唤醒,相较于 wait/notify 使用起来更灵活。那 Condition 是如何实现线程的等待和唤醒的呢,本篇文章带领大家一起解读下 Condition 的源码。
在进行源码分析前,先回顾下 Condition 是如何使用的,例如下面一个案例:
public class Test {public synchronized static void main(String[] args) throws InterruptedException {Lock lock = new ReentrantLock();Condition condition = lock.newCondition();new Thread(() -> {lock.lock();System.out.println("线程1开始等待!");try {condition.await();} catch (InterruptedException e) {e.printStackTrace();}System.out.println("线程1被唤醒继续执行结束!");lock.unlock();}, "1").start();new Thread(() -> {try {Thread.sleep(1000);} catch (InterruptedException e) {e.printStackTrace();}lock.lock();System.out.println("开始唤醒线程!");condition.signal();try {Thread.sleep(1000);} catch (InterruptedException e) {e.printStackTrace();}System.out.println("线程2执行结束!");lock.unlock();}, "2").start();}
}
运行之后,可以看到下面日志:
由于在第一个线程中,使用的 condition.await() 因此当前线程会被阻塞挂起,而第二个线程,在 1s 后进行了 condition.signal() 操作,因此第一个线程会被唤醒继续执行。这里细心的小伙伴应该可以发现,第一个线程阻塞时锁并没有释放,而第二个线程在1s后也成功拿到锁了,所以表明在 condition.await() 时会自动释放当前锁,这点和 wait 相同,在第二个线程进行了 condition.signal() 操作,第一个线程并没有继续向下执行,而是等待第二个线程处理完才会继续执行,由此可以表明被唤醒的线程会重新获取锁,成功获取锁后继续执行。
下面通过源码看下 Condition 是如何实现的等待唤醒。
二、Condition 源码解读
2.1. lock.newCondition() 获取 Condition 对象
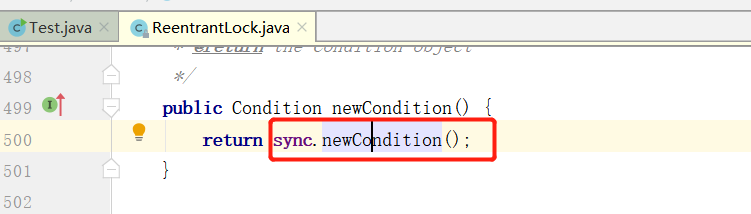
首先看下在使用 lock.newCondition() 获取一个Condition 对象时,具体做了什么,这里以 ReentrantLock 为例,进入到 ReentrantLock 的 newCondition() 方法中,又执行了 Sync 的 newCondition() 方法,再进去就会发现其实是 new 了一个 ConditionObject 类对象:

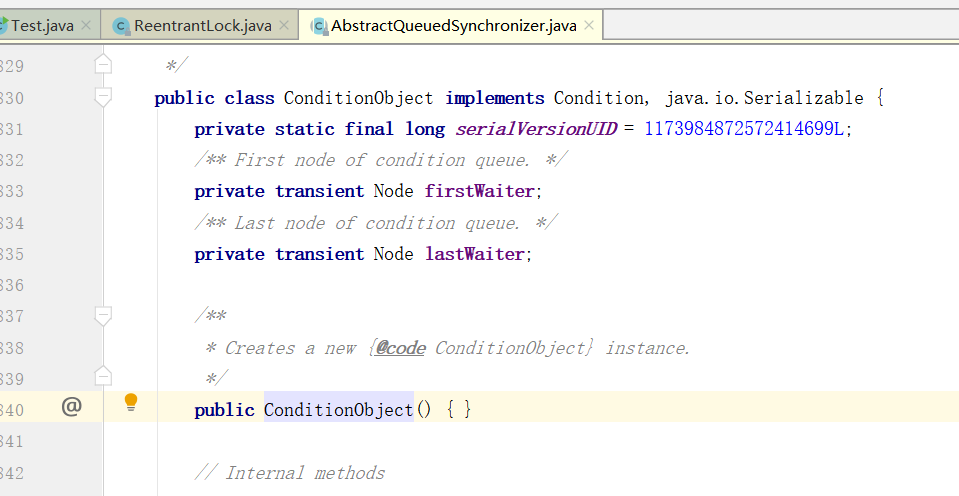
下面点到这个类中,可以看到其实是 AbstractQueuedSynchronizer 下的一个子类:
2.2. condition.await() 阻塞过程
了解到 Condition 的对象后,下面就可以看下 condition.await() 方法了,点到该类下的 await() 方法中:
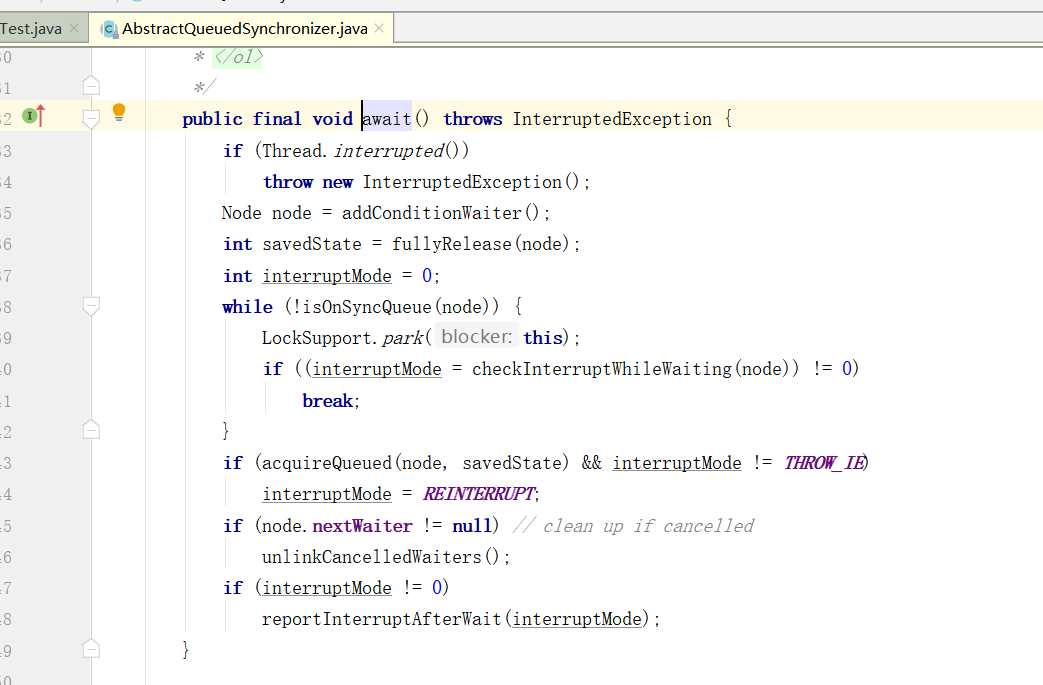
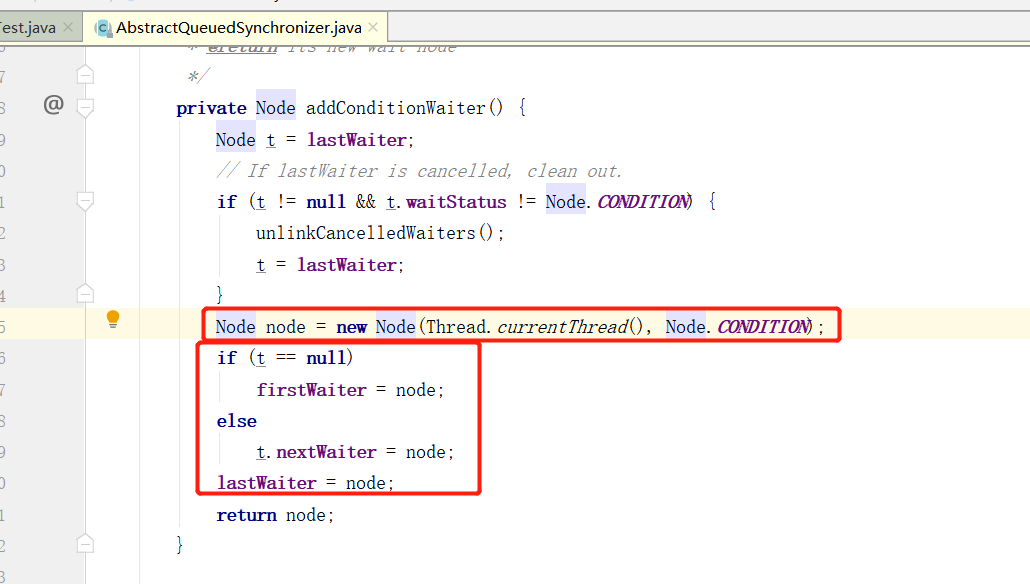
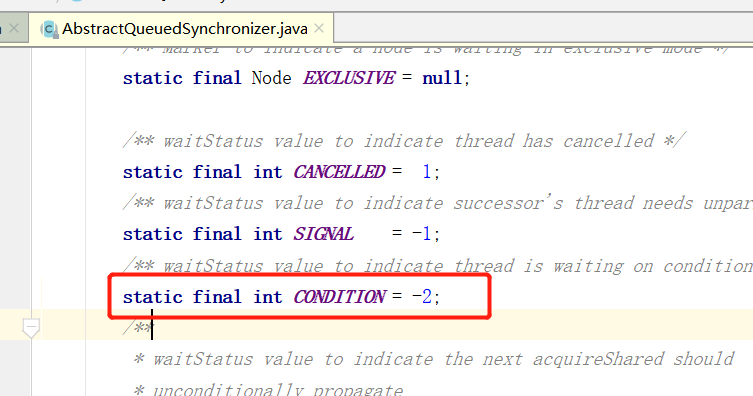
其中 addConditionWaiter() 则是将自己加入到链表中,并获取到当前线程所在的 Node ,这里注意下 Node 的状态是 Node.CONDITION 也就是 -2,后面会依赖于该状态。
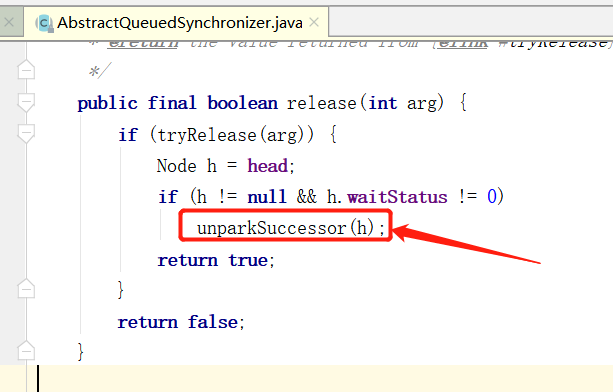
下面再回到 await() 方法继续向下看,接着使用了 fullyRelease 方法传入了当前的 Node ,这里的 fullyRelease 方法主要做了释放当前线程锁的操作。

点到 release 方法中,主要执行了 unparkSuccessor ,如果看过 Lock 锁的解锁源码,就会知道其实 unparkSuccessor 就是解锁的过程
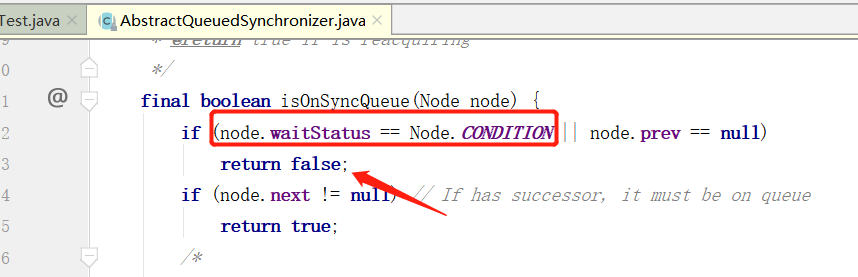
下面继续回到 await() 方法中,当释放锁后,进入到了一个 while 循环中,通过查看 isOnSyncQueue 方法,可以看到是可以符合while的条件也就可以进入到循环中:

在循环中可以明显的看到 LockSupport.park(this) ,将当前线程进行了阻塞。
2.3. condition.signal() 唤醒过程
上面已经看到线程被阻塞了,如果需要被唤醒则需要通过condition.signal(),这个方法是如何唤醒的呢?
下面来到 AbstractQueuedSynchronizer 类的 signal() 方法中:
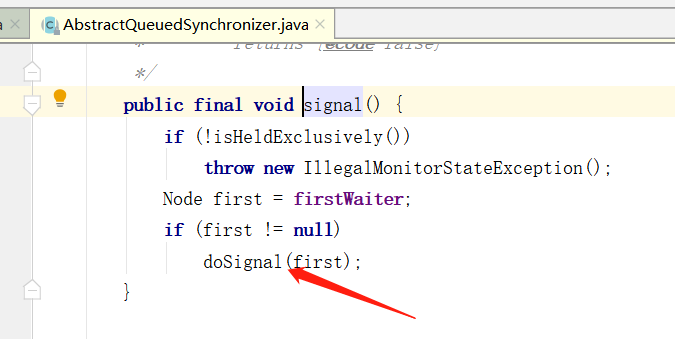
主要执行了 doSignal 方法,再点到 doSignal 中,可以看到这里开启了一个循环,对链表的每一个元素都进行了 transferForSignal 操作,这里也比较好理解,就是要唤醒等待中的线程。

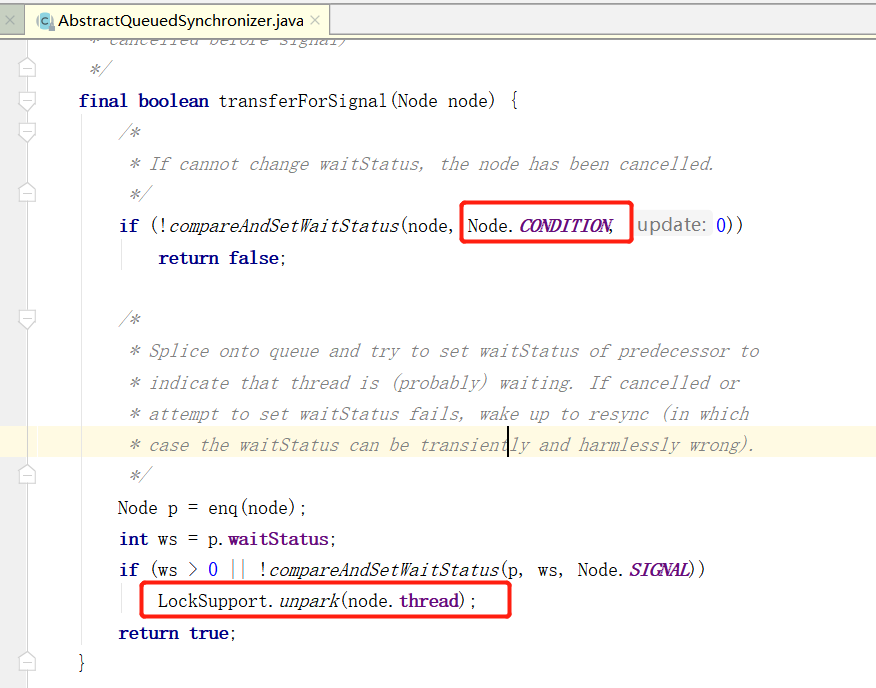
下面点到 transferForSignal 中,看下对每个 Node 都做了什么操作。点进去之后也比较好理解,如果状态是 Node.CONDITION 也就是 -2,刚才在解读 await 方法时就提到这个状态了,这里正好形成了呼应,下面有个非常显眼的操作 LockSupport.unpark(node.thread) 直接唤醒了目标线程。也就是唤醒了 2.2 中的最后一步操作。
2.4. condition.await() 被唤醒后
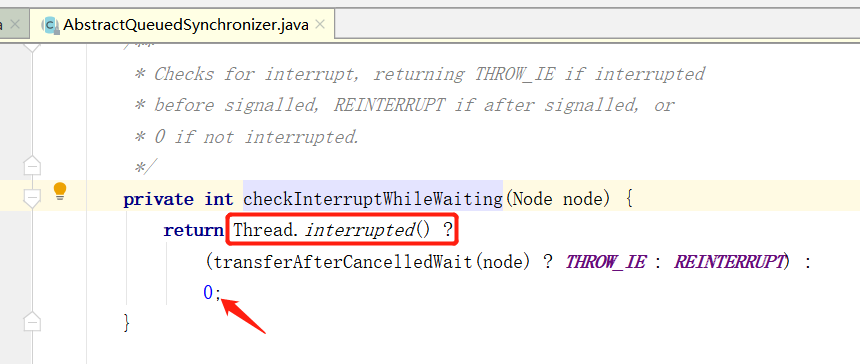
当 await() 方法中的 LockSupport.park(this) 被唤醒后,继续向下执行,下面会判断下当前线程有没有被打断,如果没被打断则 break 终止循环继续执行。

下面这个 acquireQueued 方法,如果看过 Lock 加锁的源码,应该可以了解到就是上锁的过程
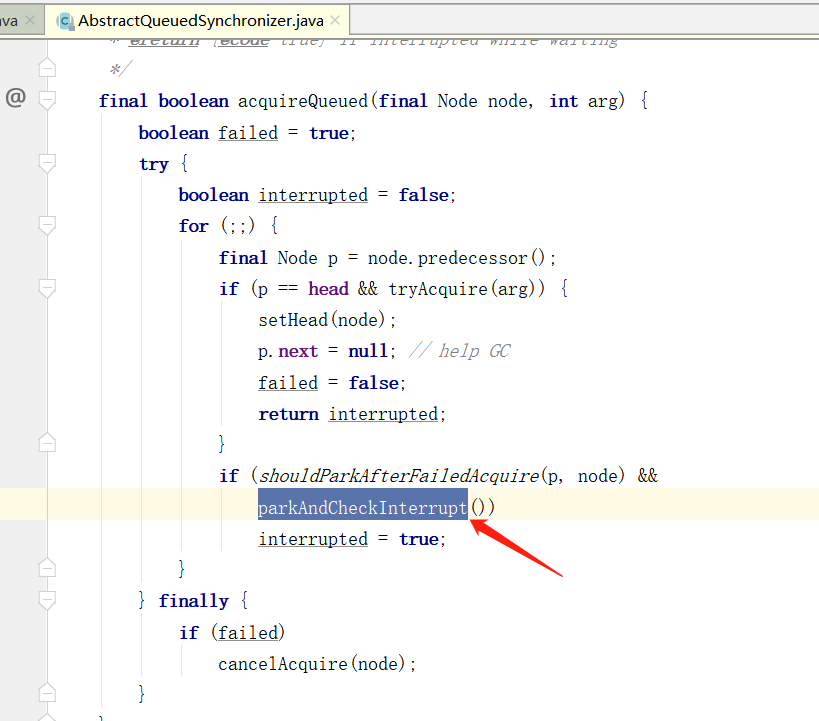
成功获取锁后就会继续执行,被阻塞的线程也就是继续执行。
三、总结
通过上面的源码分析,应该对 Condition 有了新的理解和掌握,细心地小伙伴应该可以发现在源码中好多地方都使用了 CAS ,因此当竞争资源非常激烈时, Lock 的性能要远远优于 synchronized。
相关文章:
Condition 源码解读
一、Condition 在并发情况下进行线程间的协调,如果是使用的 synchronized 锁,我们可以使用 wait/notify 进行唤醒,如果是使用的 Lock 锁的方式,则可以使用 Condition 进行针对性的阻塞和唤醒,相较于 wait/notify 使用…...
看完这篇入门性能测试
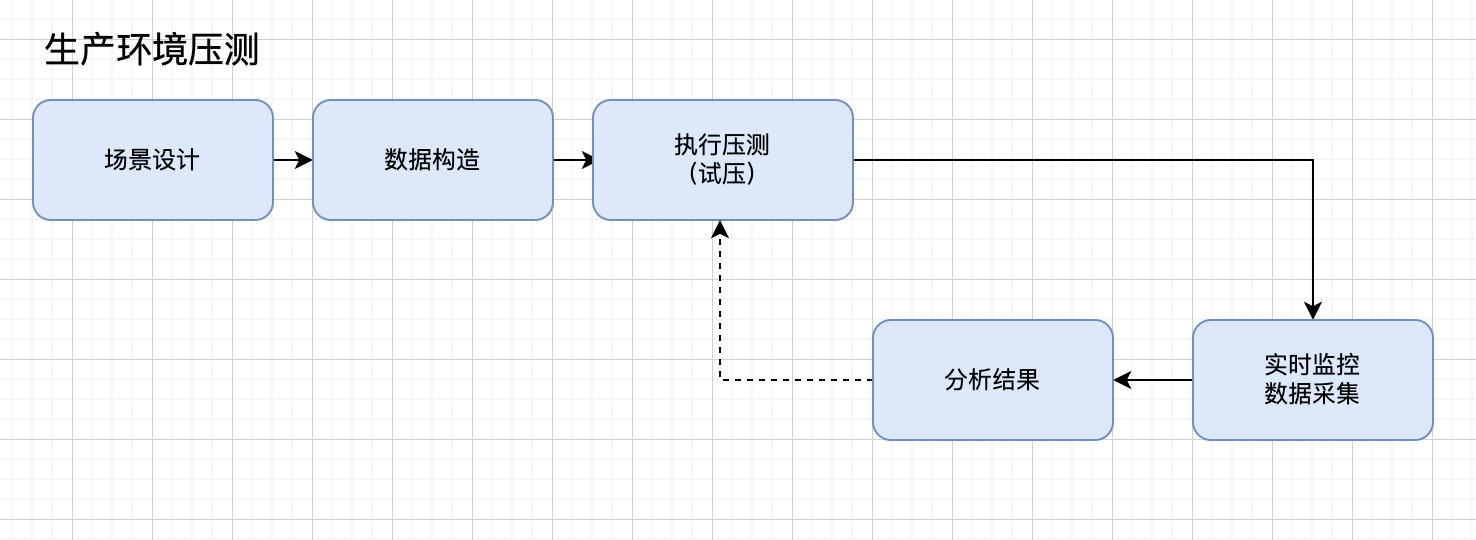
大家好,我是洋子。最近组内在进行服务端高并发接口的性能压测工作,起因是2023年2月2日,针对胡某宇事件进行新闻发布会直播,几十万人同时进入某媒体直播间,造成流量激增 从监控上可以看出,QPS到达某峰值后&…...

推导部分和——带权并查集
题解: 带权并查集 引言: 带权并查集是一种进阶的并查集,通常,结点i的权值等于结点i到根节点的距离,对于带权并查集,有两种操作需要掌握——Merge与Find,涉及到路径压缩与维护权值等技巧。 带…...
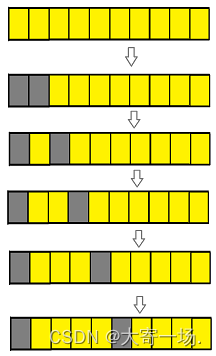
费解的开关/翻硬币
🌱博客主页:大寄一场. 🌱系列专栏: 算法 😘博客制作不易欢迎各位👍点赞⭐收藏➕关注 题目:费解的开关 你玩过“拉灯”游戏吗? 25盏灯排成一个 55 的方形。 每一个灯都有一个开关&…...
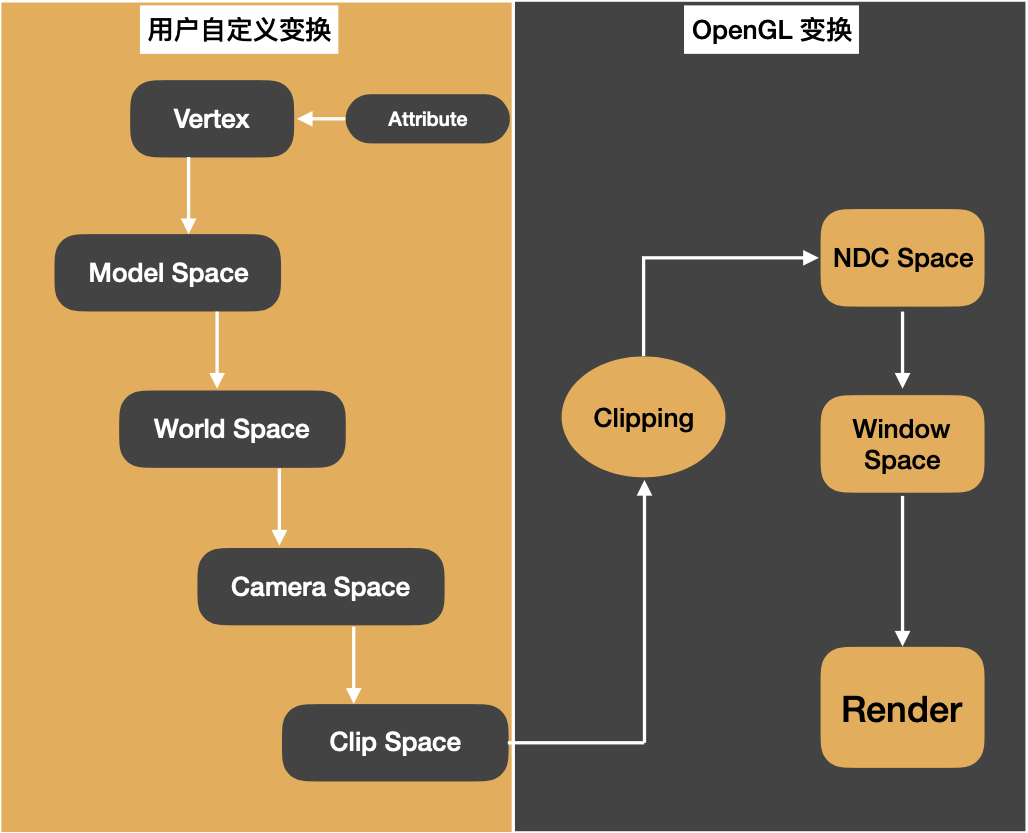
OpenGL中的坐标系
1、2D笛卡尔坐标系2D笛卡尔坐标系跟我们高中的时候学习的坐标系一样,是由x、y决定的。2、3D笛卡尔坐标系3D笛卡尔坐标系坐标由x、y、z决定,满足右手定则。3、视口glViewport(GLint x,GLint y,GLsizei width,GLsizei height)窗口和视口大小可以相同&#…...
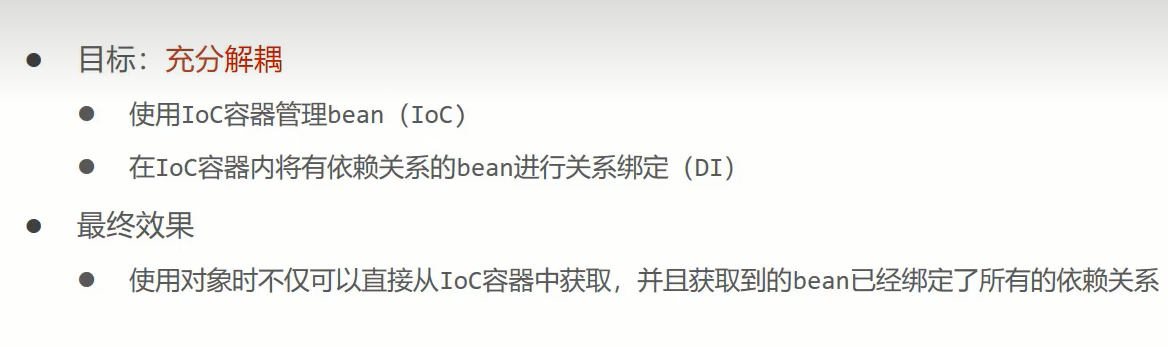
Spring——Spring介绍和IOC相关概念
Spring是以Spring Framework为核心,其余的例如Spring MVC, Spring Cloud,Spring Data,Spring Security SpringBoot的基础都是Spring Framework。 Spring Boot可以在简化开发的基础上加速开发。 Spring Cloud分布式开发 Spring有…...

A+B Problem
AB Problem 题目描述 输入两个整数 a,ba, ba,b,输出它们的和(∣a∣,∣b∣≤109|a|,|b| \le {10}^9∣a∣,∣b∣≤109)。 注意 Pascal 使用 integer 会爆掉哦!有负数哦!C/C 的 main 函数必须是 int 类型,…...
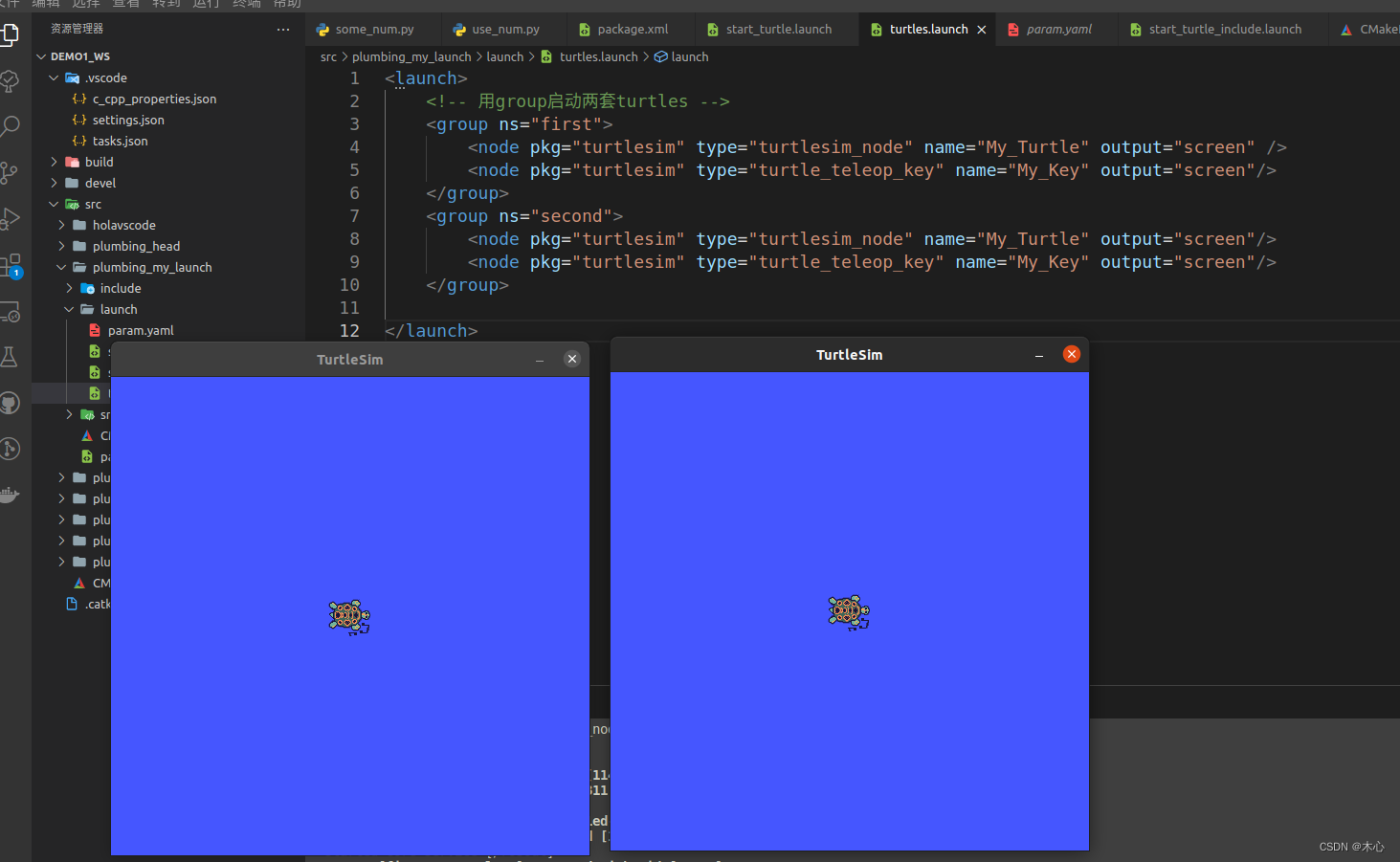
【ROS学习笔记11】ROS元功能包与launch文件的使用
【ROS学习笔记11】ROS元功能包与launch文件的使用 文章目录【ROS学习笔记11】ROS元功能包与launch文件的使用前言一、ROS元功能包二、ROS节点运行管理launch文件2.1 launch文件标签之launch2.2 launch文件标签之node2.3 launch文件标签之include2.4 launch文件标签之remap2.5 l…...

【python】
print函数 同时输出多行变量 print(a, b, sep\n) (23条消息) python3 中print函数参数详解,print(*values, sep , end\n, filesys.stdout, flushFalse)中参数介绍_sep,_phantom-dapeng的博客-CSDN博客 input() 输入浮点数,不能用int(input()) int()…...
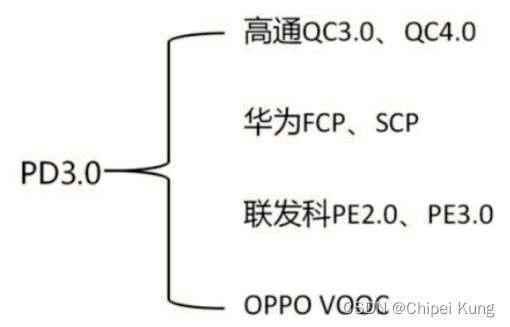
充电协议: 快充协议,如何选充电宝?
快充协议(存在两种:电压; 电流) 目前市面上的快充技术大多遵循2个技术方向: 以高通QC、联发科PEP、华为FCP为首的高压低电流快充技术; 另一种就是以OPPO的VOOC以及华为SCP为首的低电压大电流快充技术。 目前常见的快充标准还有三星AFC、联发…...
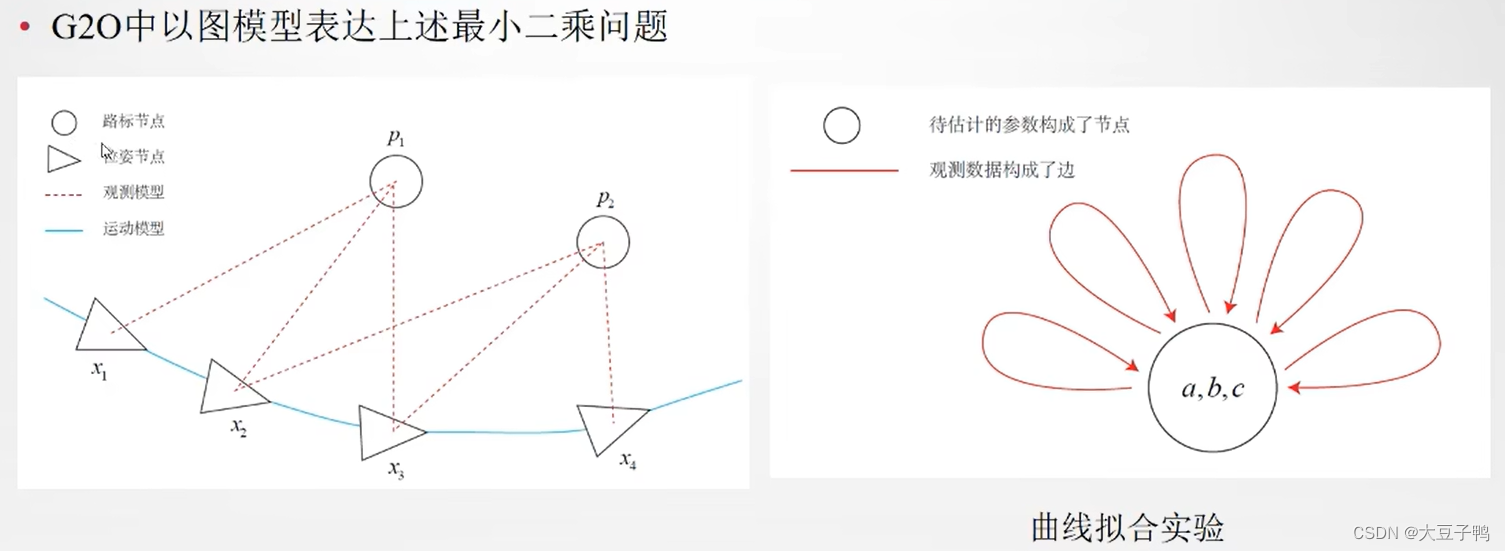
视觉SLAM十四讲ch6 非线性优化笔记
视觉SLAM十四讲ch6 非线性优化笔记本讲目标上讲回顾状态估计问题非线性最小二乘Gauss-Newton:高斯牛顿Levenburg-Marquadt:列文伯格-马夸尔特小结实践:CERES实践:G2O本讲目标 理解最小二乘法的含义和处理方式。 理解Gauss-Newton…...

Nikto工具使用指南
NiktoNikto是一款开源网站服务器扫描器,使用Perl开发,可以对服务器进行全面扫描,包括6400多个潜在危险的文件/cgi(通用网关接口(Common Gateway Interface)),废话不多说,直接上命令:基本测试&am…...
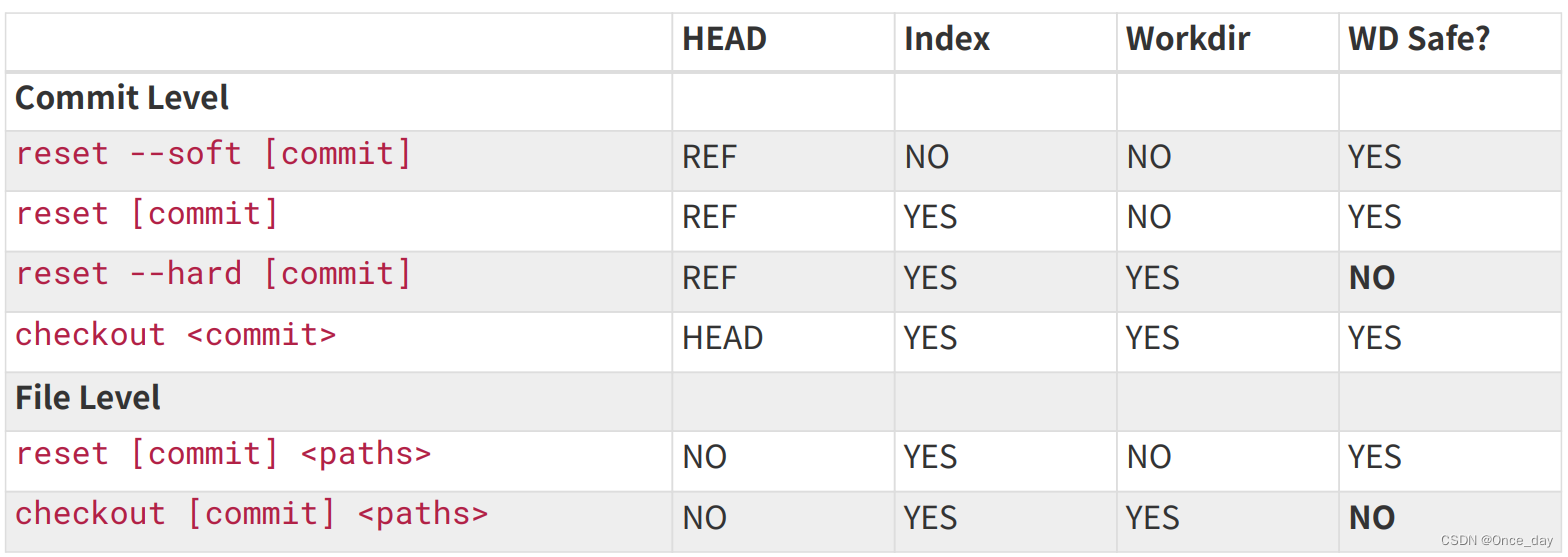
Git(4)之基本工具
Git基础之基本工具 Author:onceday date:2023年3月5日 满满长路有人对你微笑过嘛… windows安装可参考文章:git简易配置_onceday_CSDN博客 參考文档: 《progit2.pdf》,Progit2 Github。《git-book.pdf》 文章目录…...

好书推荐。
个人喜欢看传记,散文,历史等 二战名人传记,苏联列宁,朱可夫,斯大林等 英国首相丘吉尔,美国富兰克林,中国毛泽东等 创业:比尔盖,扎克伯格,苹果公司创始人乔…...

[Pytorch]DataSet和DataLoader逐句详解
将自己的数据集引入Pytorch是搭建属于自己的神经网络的重要一步,这里我设计了一个简单的实验,结合这个实验代码,我将逐句教会大家如何将数据引入DataLoader。 这里以目标检测为例,一个batch中包含图片文件、先验框的框体坐标、目标…...
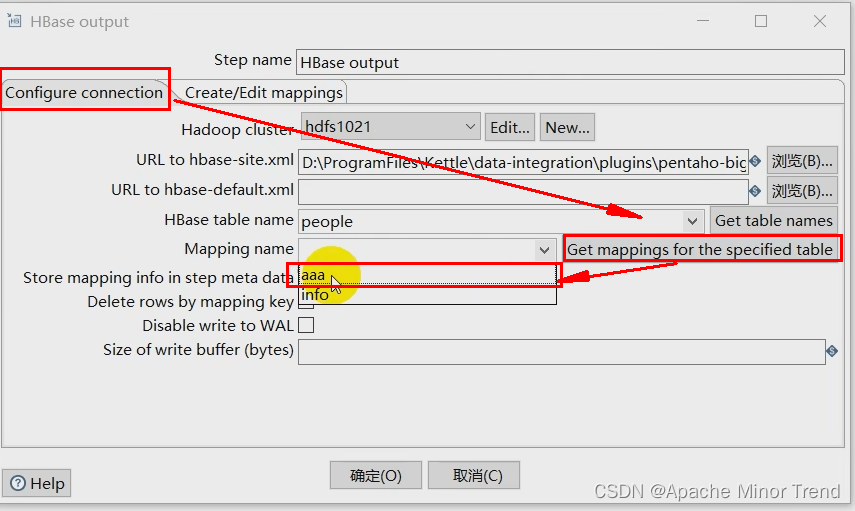
【Kettle-佛系总结】
Kettle-佛系总结Kettle-佛系总结1.kettle介绍2.kettle安装3.kettle目录介绍4.kettle核心概念1.转换2.步骤3.跳(Hop)4.元数据5.数据类型6.并行7.作业5.kettle转换1.输入控件1.csv文件输入2.文本文件输入3.Excel输入4.XML输入5.JSON输入6.表输入2.输出控件…...

JavaSE网络编程
JavaSE网络编程一、基本概念二、常用类三、使用方法1、创建服务器端Socket2、创建客户端Socket3、创建URL对象JavaSE中的网络编程模块提供了一套完整的网络编程接口,可以方便地实现各种基于网络的应用程序。本文将介绍JavaSE中网络编程模块的基本知识、常用类以及使…...
9万字“联、管、用”三位一体雪亮工程整体建设方案
本资料来源公开网络,仅供个人学习,请勿商用。部分资料内容: 1、 总体设计方案 围绕《公共安全视频监控建设联网应用”十三五”规划方案》中的总体架构和一总两分结构要求的基础上,项目将以“加强社会公共安全管理,提高…...

springboot自动装配原理
引言 springboot的自动装配是其重要特性之一,在使用中我们只需在maven中引入需要的starter,然后相应的Bean便会自动注册到容器中。例如: <dependency><groupId>org.springframework.boot</groupId><artifactId>spr…...
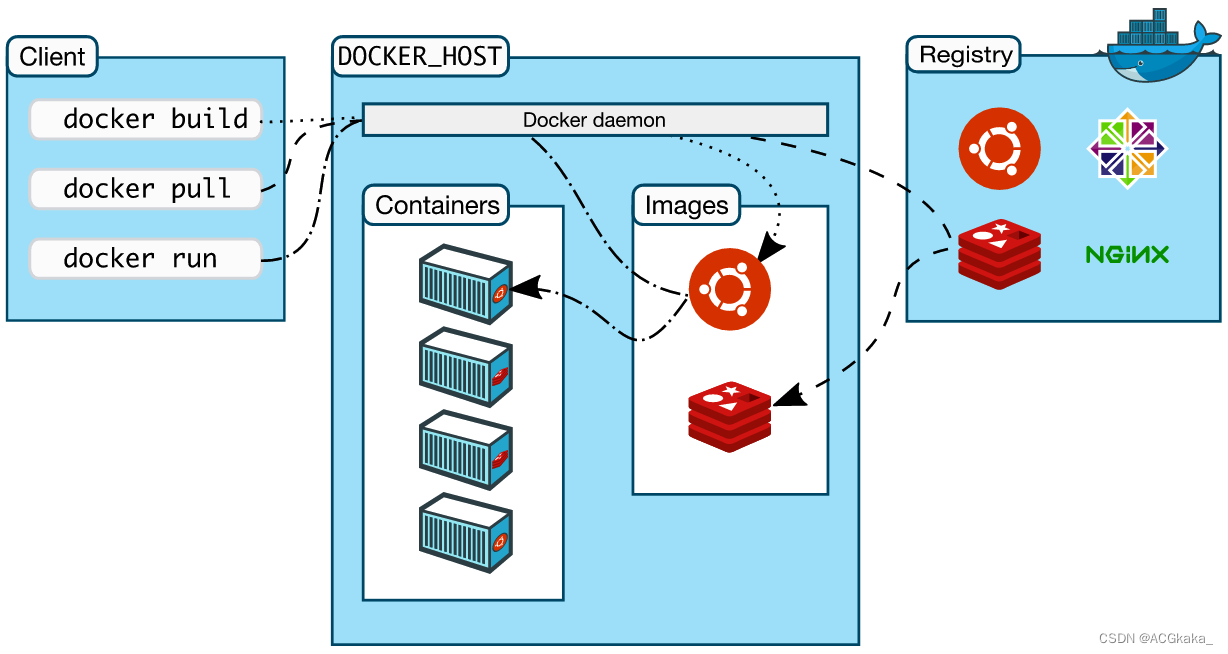
Docker学习(二十)什么是分层存储?
目录1.简介2.什么是 Union Mount?3.分层介绍1)lowerdir 层(镜像层)2)upperdir 层(容器层)3)merged 层4.工作原理1)读:2)写:3ÿ…...

Vue项目调试神器Code-Inspector-Plugin全适配指南:从Vite、Webpack到Nuxt.js
Vue项目调试神器Code-Inspector-Plugin全适配指南:从Vite、Webpack到Nuxt.js 在Vue生态中,开发效率的提升往往依赖于工具的精准选择。当项目规模扩大、组件层级加深时,如何在浏览器中快速定位到源代码中的对应位置,成为影响开发体…...

Fun-ASR-MLT-Nano-2512保姆级教程:从安装到Web界面快速上手
Fun-ASR-MLT-Nano-2512保姆级教程:从安装到Web界面快速上手 1. 项目介绍与核心功能 Fun-ASR-MLT-Nano-2512是阿里通义实验室推出的轻量级多语言语音识别模型,专为实际应用场景优化设计。这个800M参数的模型在保持小巧体积的同时,实现了专业…...

LongCat动物百变秀效果展示:橘猫变布偶、柯基穿毛衣,AI编辑惊艳案例
LongCat动物百变秀效果展示:橘猫变布偶、柯基穿毛衣,AI编辑惊艳案例 1. 开篇:当AI成为宠物造型师 想象一下这样的场景:你拍了一张自家橘猫的照片,突然想看看它变成高贵布偶猫的样子;或者给柯基犬穿上毛衣…...

SE110 0608830109伺服控制器
SE110 0608830109 伺服控制器简介SE110 0608830109 是工业自动化系统中的伺服控制器模块主要用于驱动和控制伺服电机,实现精确运动控制支持闭环控制,确保位置、速度和加速度精度内置高速处理器,可快速响应控制指令提供多种控制模式࿰…...

LFM2.5-1.2B-Thinking-GGUF在软件测试中的应用:自动化生成测试用例与代码审查
LFM2.5-1.2B-Thinking-GGUF在软件测试中的应用:自动化生成测试用例与代码审查 1. 引言:当AI遇上软件测试 "测试工程师80%的时间都在写重复的测试用例"——这个行业痛点正在被AI改变。想象一下,当你拿到一份需求文档,A…...

GME-Qwen2-VL-2B-Instruct保姆级教程:多GPU并行推理加速图文批量匹配效率
GME-Qwen2-VL-2B-Instruct保姆级教程:多GPU并行推理加速图文批量匹配效率 1. 工具简介 GME-Qwen2-VL-2B-Instruct是一个专门用于图文匹配度计算的本地工具,基于先进的多模态模型开发。这个工具解决了传统图文匹配中经常遇到的打分不准问题,…...

CUDA12.4环境适配:OpenClaw调用Qwen3-14B镜像的驱动配置详解
CUDA12.4环境适配:OpenClaw调用Qwen3-14B镜像的驱动配置详解 1. 为什么需要关注CUDA环境适配 上周我在本地部署Qwen3-14B镜像时,遇到了一个典型问题:模型加载到一半突然崩溃,控制台只留下一行模糊的CUDA错误提示。经过两天排查才…...
)
别再手动算不确定度了!用C++代码一键搞定科大奥锐虚拟仿真实验(附完整代码)
用C解放物理实验:不确定度计算的自动化实践 物理实验报告中最令人头疼的部分莫过于那些繁琐的不确定度计算。每次测量完数据,面对满纸的数字和公式,总有一种被数学淹没的窒息感。记得上学期做"长度与固体密度测量"实验时࿰…...

OpenClaw+百川2-13B-4bits:10分钟搭建学术资料收集机器人
OpenClaw百川2-13B-4bits:10分钟搭建学术资料收集机器人 1. 为什么需要学术资料收集机器人? 上周整理毕业论文参考文献时,我发现自己浪费了整整3个小时在重复操作上:在Google Scholar搜索关键词→逐一点开论文链接→手动判断相关…...

串扰是怎么来的?相邻层走线方向比间距更重要
摘要:在高速PCB设计中,串扰是导致信号完整性问题的主要原因之一。许多工程师过于关注走线间距(3W规则),却忽视了相邻层走线方向的影响。本文将从物理机制出发,解释为什么相邻层走线方向正交(垂直…...