超详细红黑树的模拟实现

前言
有人说设计出AVL树的的人是个大牛,那写红黑树(RBTree)的人就是天才!
上一篇文章,我们已经学习了AVL树,牛牛个人认为AVL树已经够优秀了,那让我们一起探究一下,为什么红黑树比AVL树的结构还要优秀吧!
目录
- 前言
- 一、红黑树的介绍
- 二、手撕红黑树
- 2.1 框架结构分析
- 2.11 结点颜色
- 2.12 结点类
- 2.13 红黑树结构
- 2.2 接口实现
- 2.21 插入接口(重点)
- 情况1: 父亲是爷爷的左,cur结点是父亲的左。 (左左)
- 情况2: 父亲是爷爷的左,cur结点是父亲的右。 (左右)
- 情况3: 父亲是爷爷的右,cur结点是父亲的左。 (右左)
- 情况4: 父亲是爷爷的右,cur结点是父亲的左。 (右右)
- 2.22 最左侧结点(LeftMost)
- 2.23 最右侧结点(RightMost)
- 2.24 检测函数(次重点)
- 2.25 获取根节点
- 2.25 获取红黑树的高度
- 2.26 find函数
- 三、结语:
一、红黑树的介绍
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。
红黑树,是一种自平衡的二叉查找树,它的性质比较复杂,但却非常重要,常用于C++中的STL库中的set、map等容器。红黑树的节点有两种颜色:红色(red)和黑色(black)。它具有如下五个性质:
- 每个节点是红色或者黑色的。
- 根节点是黑色的。
- 每个叶子节点(这里特指最下面的空节点)是黑色的。
- 如果一个节点是红色的,则它的子节点必须是黑色的。(即:每条路径上不能出现连续的红结点)
- 从任一节点到其每个叶子节点的所有路径都包含相同数目的黑色节点。
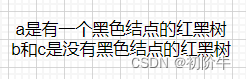
由于红色结点的父亲必须是黑色结点,并且每条路径上的黑色结点的个数也必须相同,所以得到了红黑树最长路径中节点个数不会超过最短路径节点个数的两倍
这也就决定了,红黑树的高度是log(n)级别的。
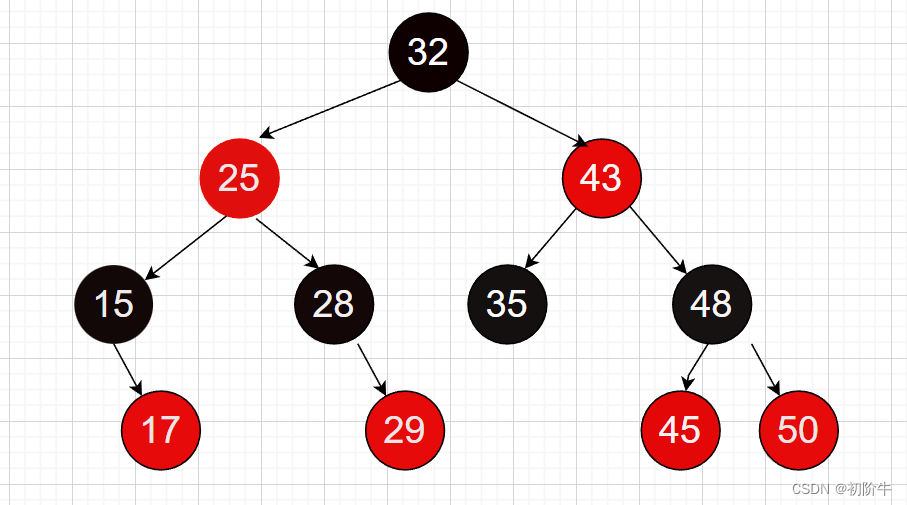
例如,下面这个就是红黑树
二、手撕红黑树
2.1 框架结构分析
2.11 结点颜色
红黑树较于AVL树,不在使用平衡因子,而是增设了颜色变量,这里我们可以枚举出这两种颜色,方便使用。
enum Colour //枚举出颜色{RED, //红色BLACK //黑色};
2.12 结点类
同AVL树一样,红黑树也是三叉链
//结点类template<class K, class V>struct RBTreeNode{//指针域RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv; //数据域Colour _Col;RBTreeNode(const pair<K, V>& kv)//构造函数:_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _Col(RED) //注意这里,默认新构造的结点是红色的{}};
2.13 红黑树结构
//红黑树的结构template<class K, class V>class RBTree{typedef RBTreeNode<K, V> Node;public:// 在红黑树中插入值为data的节点,插入成功返回true,否则返回false//此版本红黑树对于重复元素,插入失败bool Insert(const pair<K, V>& kv);// 搜索红黑树中是否存在值为data的节点。//存在返回该节点的地址,不存在则返回nullptrNode* Find(const pair<K, V>& data);// 获取红黑树最左侧节点Node* LeftMost();// 获取红黑树最右侧节点Node* RightMost();//(这里的玩法大家应该不陌生了) int Height();//计算红黑树的高度bool IsValidRBTRee();// 检测红黑树是否为有效的红黑树private:bool _IsValidRBTRee(Node* pRoot, size_t blackCount, size_t pathBlack);int Height(Node* root);// 左单旋void RotateL(Node* pParent);// 右单旋void RotateR(Node* pParent);// 为了操作树简单起见:获取根节点Node*& GetRoot();private:Node* _root = nullptr;};
2.2 接口实现
2.21 插入接口(重点)
本篇主要讲解的部分就是红黑树的插入操作。
| 函数名 : | insert |
|---|---|
| 返回值 | 插入成功,返回true;插入失败,返回false |
| 形参 | 键值对 |
//插入函数
template<class K, class V>
bool RBTree<K, V>::Insert(const pair<K, V>& kv) {
}
(1).如果是第一次插入,则插入的是根节点,则需要特殊处理,因为要给根节点root赋值。
在结点类中我们提到,在创建的新节点我们给与了默认颜色为RED(红色),而红黑树的根节点必须是BLACK(黑色)的,这里一定要记得修改一下颜色。
//第一次插入if (_root == nullptr) {_root = new Node(kv);_root->_Col = BLACK; //注意根节点一定是黑色的,默认构造的新节点是红色的,所以这里要改一下。return true;}
(2) 寻找插入位置
红黑树也是二叉搜索树,学到这里,相信友友们在AVL树和二叉搜索树学习阶段,已经知道如何寻找插入位置。
//寻找插入位置while (cur) {parent = cur;if (_root->_kv.first > kv.first) {cur = cur->_left; //插入的值当前结点的值小,往左走}else if (_root->_kv.first < kv.first) {cur = cur->_right; //插入的值当前结点的值大,往右走}else {return false; //本篇实现的红黑树,对于重复值,插入失败}}//判断插入在左边还是右边cur = new Node(kv);if (kv.first < parent->_kv.first) { //插入在左边parent->_left = cur;}else { //插入在右边parent->_right = cur;}cur->_parent = parent; //保证三叉链的关系
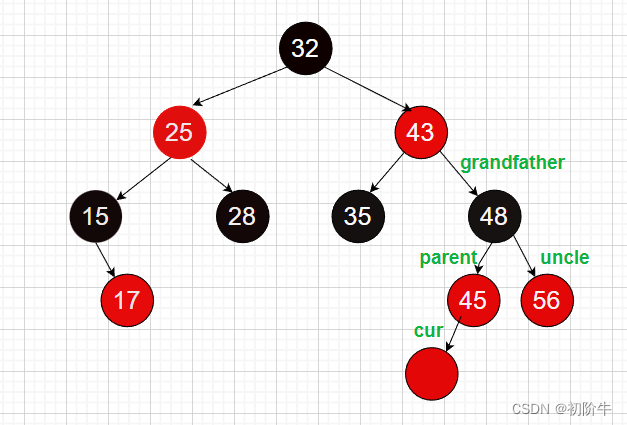
3.看uncle(叔叔)
叔叔(uncle)?这里我将当前结点的父亲(parent)的兄弟称为叔叔结点。
示例:
当我们新增一个结点时,默认新节点的颜色为RED,如果它的父亲结点是黑色的,则不需要做任何调整,直接插入成功!

当父亲结点是红色的时候,则与新增结点一起,会构成连续的红色结点,此时需要调整。
调整规则主要看uncle叔叔结点。
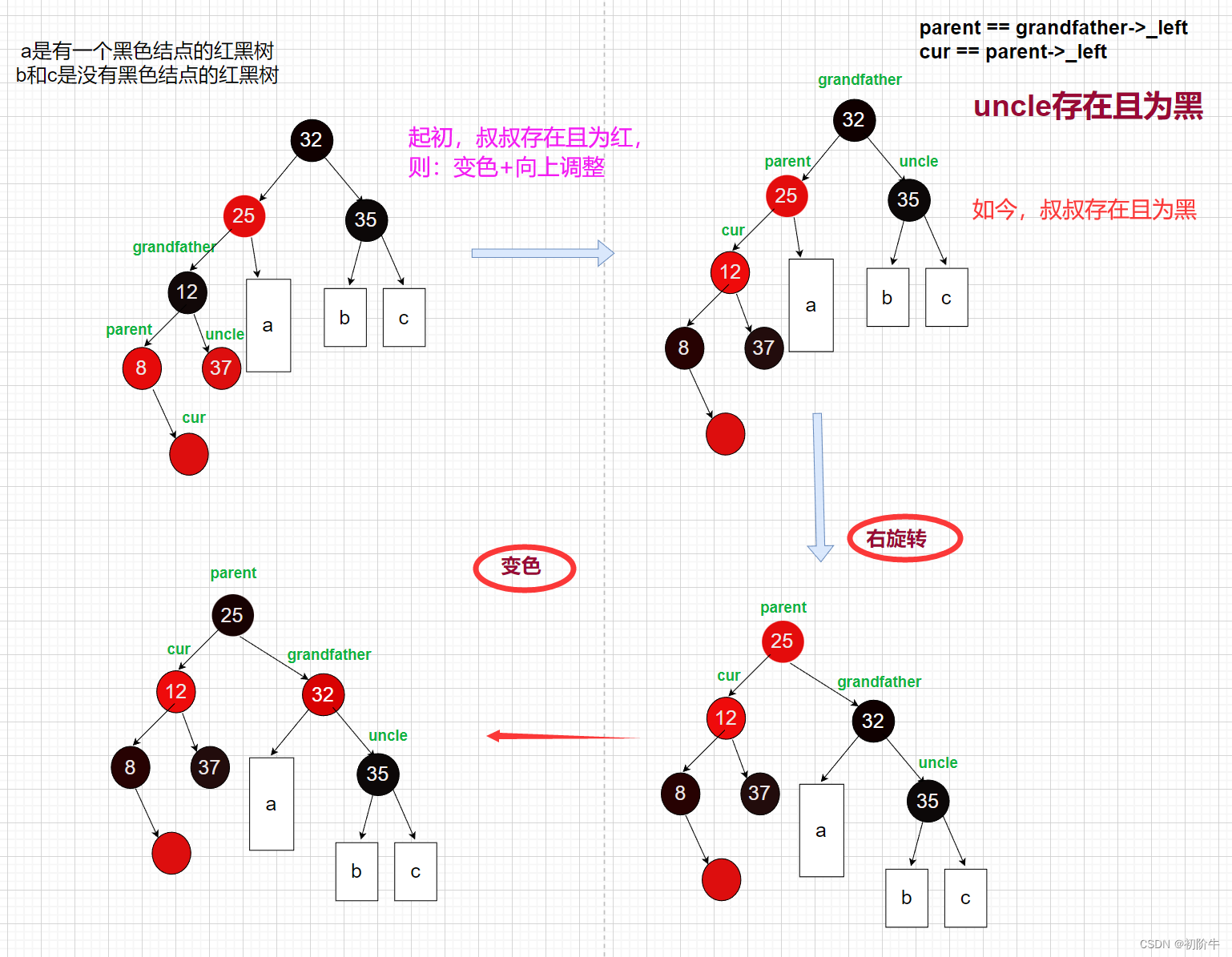
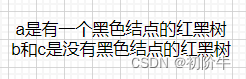
情况1: 父亲是爷爷的左,cur结点是父亲的左。 (左左)
👻情况:叔叔存在且为红
🔑调整方案: 变色+向上更新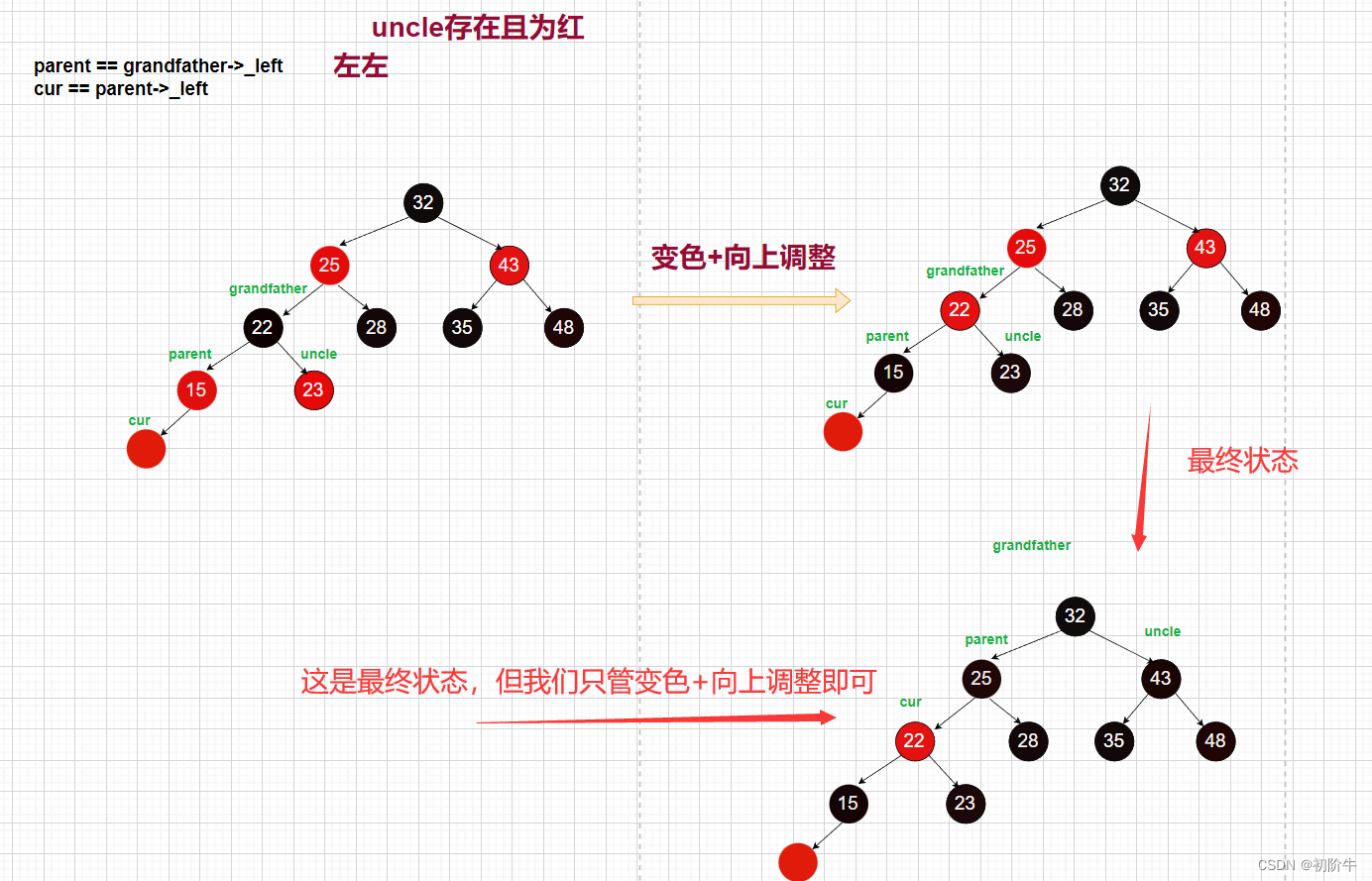 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
👻情况:叔叔不存在,或者存在且为黑
🔑调整方案: 右旋+变色
 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
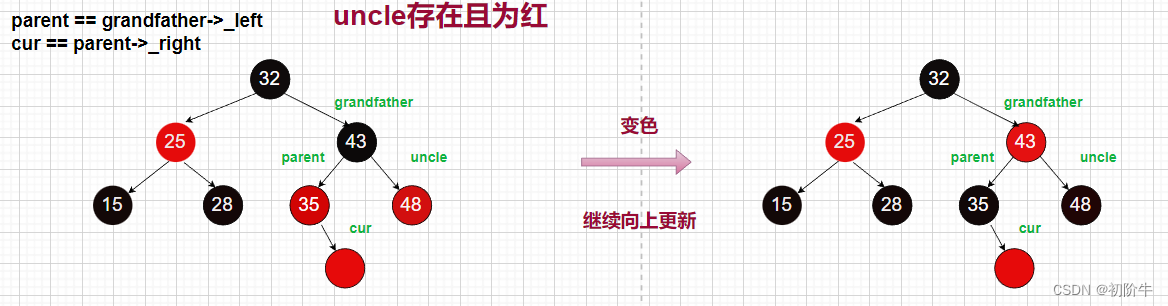
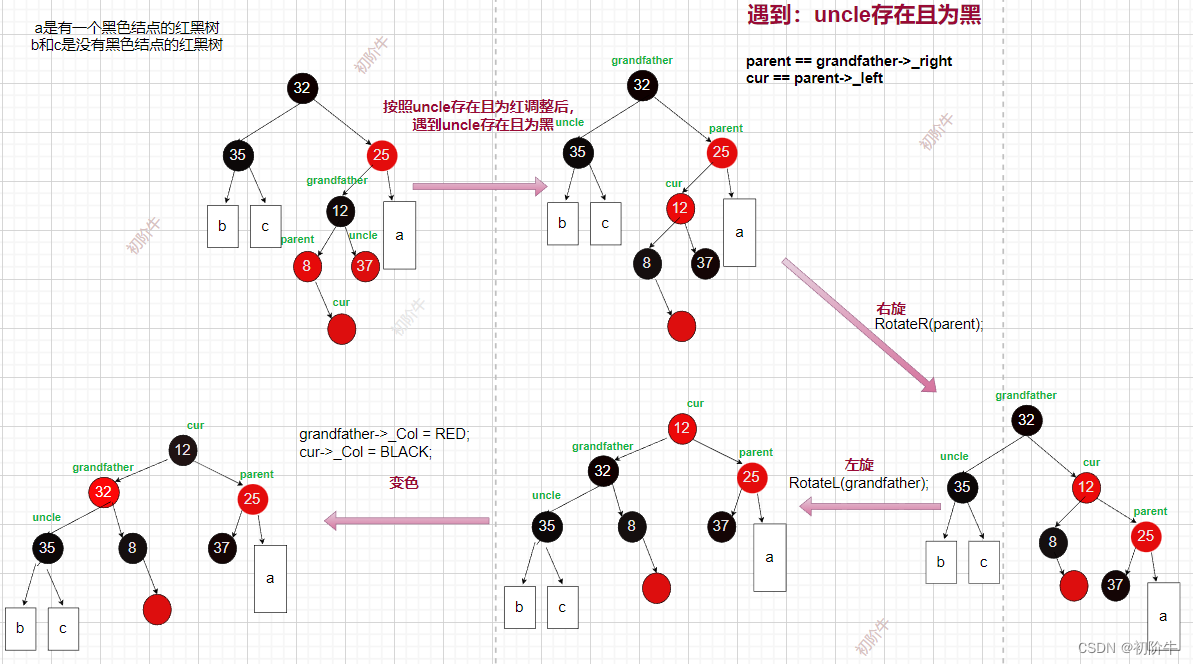
情况2: 父亲是爷爷的左,cur结点是父亲的右。 (左右)
👻情况:叔叔存在且为红
🔑调整方案: 变色+向上更新
 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
👻情况:叔叔不存在,或者存在且为黑
🔑调整方案: 左右双旋+变色
示例图:
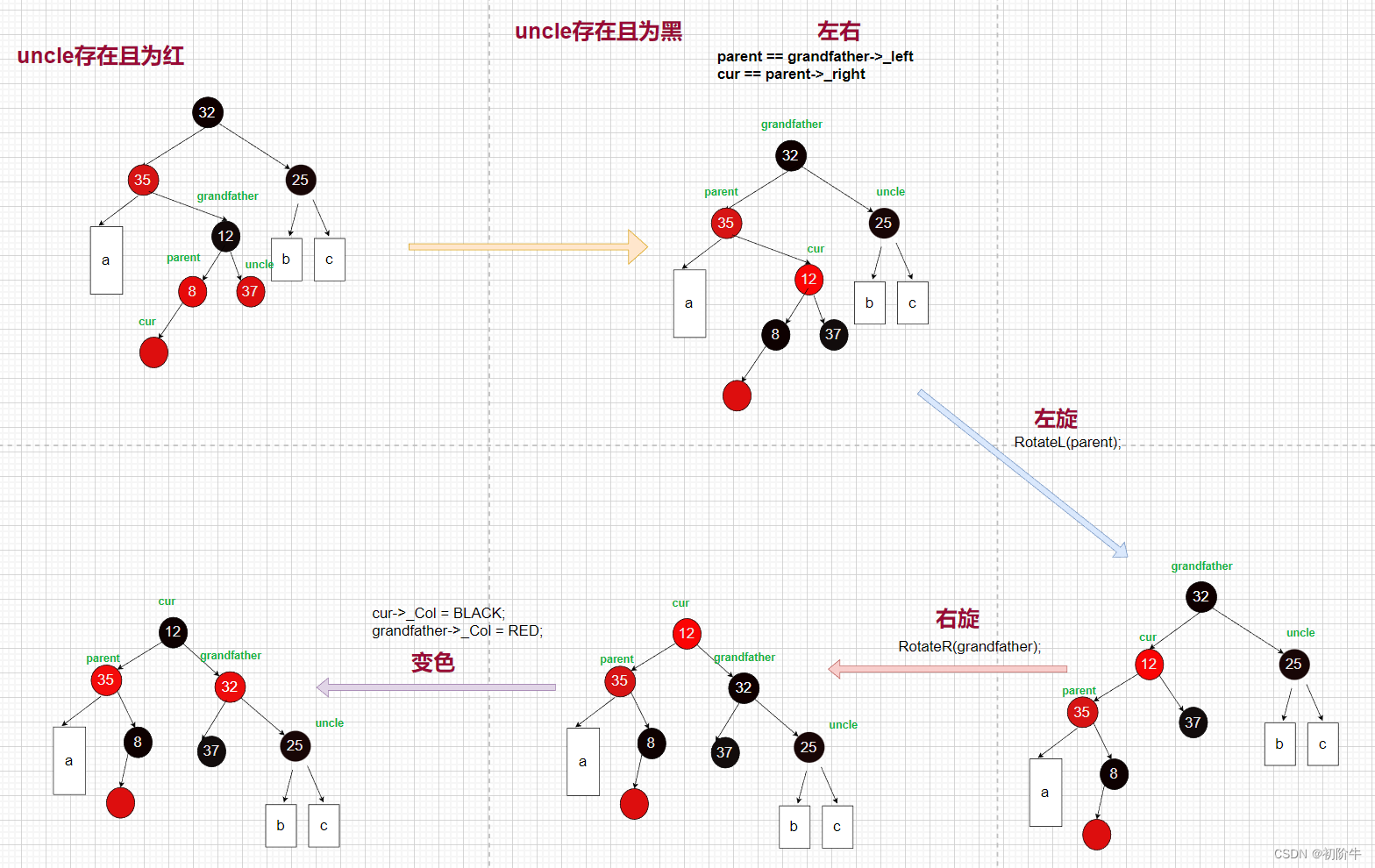 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
情况3: 父亲是爷爷的右,cur结点是父亲的左。 (右左)
👻情况:叔叔存在且为红
🔑调整方案: 变色+向上更新
这里不画图了,牛牛画累了。
👻情况:叔叔不存在,或者存在且为黑
🔑调整方案: 右左双旋+变色
 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
情况4: 父亲是爷爷的右,cur结点是父亲的左。 (右右)
👻情况:叔叔存在且为红
🔑调整方案: 变色+向上更新
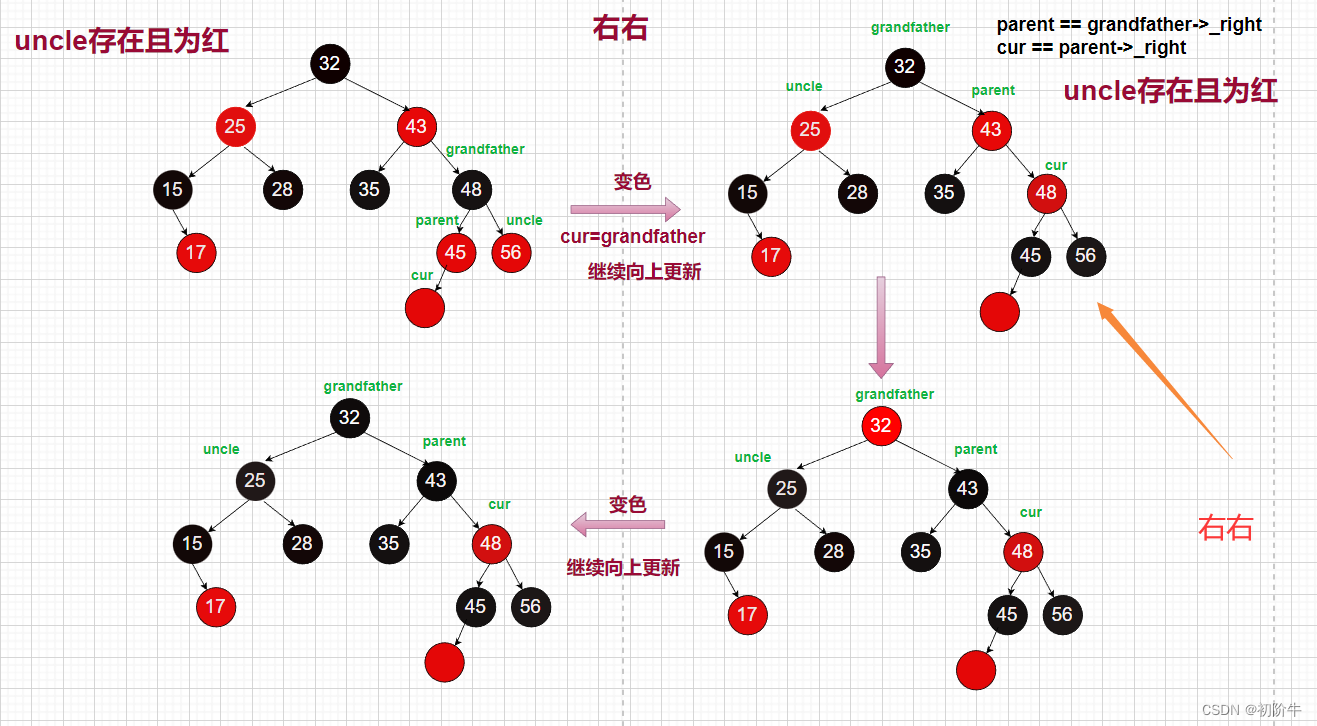 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
👻情况:叔叔不存在,或者存在且为黑
🔑调整方案: 左旋+变色
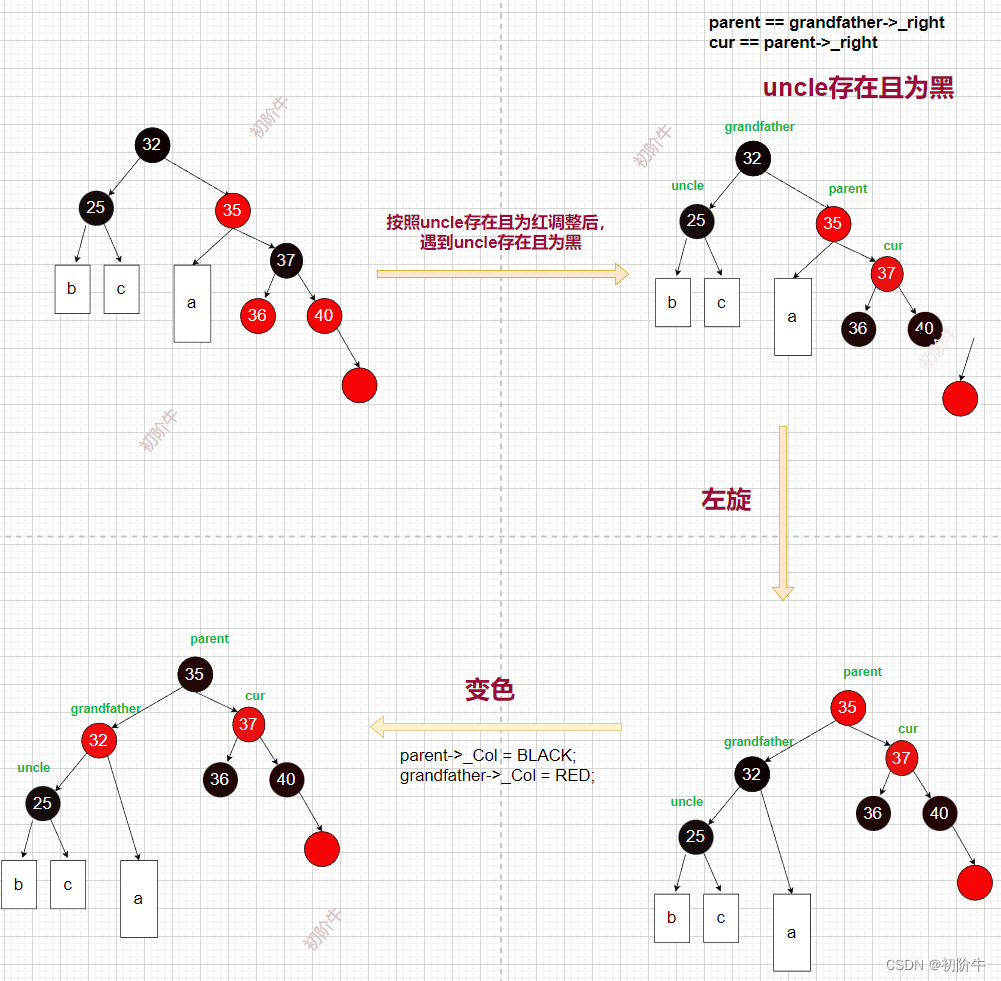 (图片为博主原创,请勿随意转发使用)
(图片为博主原创,请勿随意转发使用)
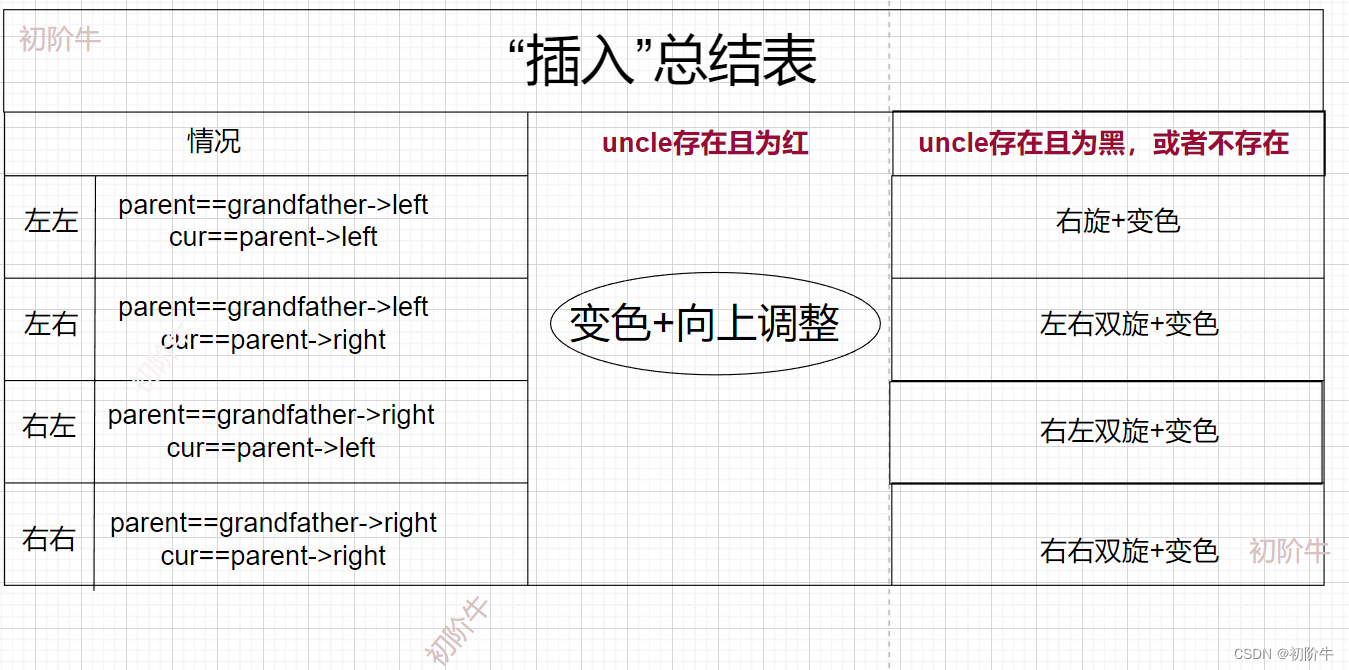
总结:
红黑树的插入主要看uncle
分为两种情况:
(1)uncle存在且为红
调整方案: 变色+继续向上调整
(2)uncle不存在或者uncle存在且为黑
调整方案: 旋转+变色
至于如何旋转,因为红黑树没有采用平衡因子的方式,所以我们采用判断grandfather与parent 和 parent与cur的关系结构来决定。
下图是具体调整总结:
总代码:
bool Insert(const T& kv) {if (_root == nullptr) {_root = new Node(kv);_root->_Col = BLACK; //注意根节点一定是黑色的,默认构造的新节点是红色的,所以这里要改一下。return true;}Node* cur = _root, * parent = nullptr;//寻找插入位置while (cur) {parent = cur;if (_root->_kv.first > kv.first) {cur = cur->_left;}else if (_root->_kv.first < kv.first) {cur = cur->_right;}else {return false;}}//判断插入在左边还是右边cur = new Node(kv);if (kv.first < parent->_kv.first) { //插入在左边parent->_left = cur;}else { //插入在右边parent->_right = cur;}cur->_parent = parent; //保证三叉链的关系//while (parent && parent->_Col == RED) {//爷爷结点Node* grandfather = parent->_parent;if (parent == grandfather->_left) { //如果父亲是爷爷的左孩子Node* uncle = grandfather->_right; //那么叔叔就是爷爷的右孩子//叔叔存在且为红if (uncle && uncle->_Col == RED) {//变色uncle->_Col=parent->_Col = BLACK;grandfather->_Col = RED;//继续向上更新cur = grandfather;parent = grandfather->_parent;}else { //叔叔不存在或者 存在且为黑if (cur == parent->_left) { // g// p//cRotateR(grandfather);grandfather->_Col = RED;parent->_Col = BLACK;}else {// g// p// cRotateL(parent);RotateR(grandfather);cur->_Col = BLACK;grandfather->_Col = RED;}break; //此时最顶端的结点已经变成黑色了,不需要继续向上更新了。}}else { // 如果父亲是爷爷的右孩子Node* uncle = grandfather->_left; //那么叔叔就是爷爷的左孩子//叔叔存在且为红if (uncle && uncle->_Col == RED) {//变色uncle->_Col = parent->_Col = BLACK;grandfather->_Col = RED;//继续向上更新cur = grandfather;parent = grandfather->_parent;}else { //叔叔不存在或者 存在且为黑if (cur == parent->_left) {// g// p// c//注意旋转时的传参RotateR(parent);RotateL(grandfather);grandfather->_Col = RED;cur->_Col = BLACK;}else {// g// p// cRotateL(grandfather); //注意旋转时的传参parent->_Col = BLACK;grandfather->_Col = RED;}break; //此时最顶端的结点已经变成黑色了,不需要继续向上更新了。}}}_root->_Col = BLACK; //最后根节点一定是黑的return true;}
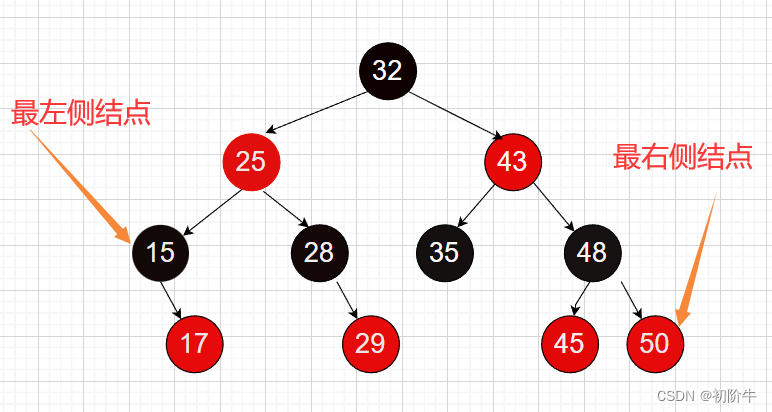
2.22 最左侧结点(LeftMost)
对于二叉搜索树,如果我们按中序遍历,则可以得到一个有序序列。
中序遍历的首个结点: 最左侧结点
中序遍历的最后结点: 最右侧结点
// 获取红黑树最左侧节点template<class K, class V>typename RBTree<K, V>::Node* RBTree<K, V>::LeftMost() {Node* left_most = _root;while (left_most->left) {left_most = left_most->left;}return left_most;}
2.23 最右侧结点(RightMost)
// 获取红黑树最右侧节点template<class K, class V>typename RBTree<K, V>::Node* RBTree<K, V>::RightMost() {Node* right_most = _root;while (right_most->right) {right_most = right_most->left;}return right_most;}
2.24 检测函数(次重点)
在实现红黑树时,也许我们会遇到各种问题,好不容易跑通代码后,我们缺无法判断自己实现的红黑树是否正确,是否符合红黑树的规则。
此时,我们可以设计一个检测函数,检测实现的红黑树是否平衡。
- 空树也是红黑树
- 根节点必须是红黑树
- 我们可以设置一个“基准值”,基准值为红黑树一条路径中的黑色结点的个数。
- 遍历每条红黑树的路径,判断红黑树结点的个数,是否与基准值相等。
- 除此之外,出现连续两个红色结点则返回
false。
// 检测红黑树是否为有效的红黑树,注意:其内部主要依靠_IsValidRBTRee函数检测
template<class K, class V>
bool RBTree<K, V>::IsValidRBTRee() {if (_root == nullptr) //空树也是红黑树return true;if (_root->_Col != BLACK) //根节点必须是红黑树{return false;}// 基准值int pathBlack = 0;Node* cur = _root;while (cur){if (cur->_Col == BLACK)++pathBlack;cur = cur->_left;}_IsValidRBTRee(_root, 0, pathBlack);
}template<class K, class V>
bool RBTree<K, V>::_IsValidRBTRee(Node* pRoot, size_t blackCount, size_t pathBlack) {if (pRoot == nullptr){if (blackCount != pathBlack) //一条路径走到底,也就是走到叶子结点以后,判断这条路径上的黑色结点个数(blackCount)是否与 设定的黑色结点个数相同(pathBlack)return false;return true;}if (pRoot->_Col == BLACK){++blackCount;}if (pRoot->_Col == RED && pRoot->_parent && pRoot->_parent->_Col == RED){cout << _root->_kv.first << "出现连续红色节点" << endl;return false;}//递归访问左右子树return _IsValidRBTRee(pRoot->_left, blackCount, pathBlack)&& _IsValidRBTRee(pRoot->_right, blackCount, pathBlack);
}
2.25 获取根节点
template<class K, class V>typename RBTree<K, V>::Node*& RBTree<K, V>::GetRoot() {return _root;}
2.25 获取红黑树的高度
template<class K, class V>int RBTree<K, V>::Height(){return Height(_root);}template<class K, class V>int RBTree<K, V>::Height(typename RBTree<K, V>::Node* root){if (root == nullptr)return 0;int leftHeight = Height(root->_left); //计算左子树的高度int rightHeight = Height(root->_right); //计算右子树的高度return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}
2.26 find函数
template<class K, class T,>
typename RBTree<class K, class T, class Of_T>::Node* RBTree<class K, class T, class Of_T>::Find(const T& data) {Node* cur = _root;while (cur){if (data > cur->_data){cur = cur->_right;}else if (data < cur->_data){cur = cur->_left;}else return cur;}return nullptr; // 找不到目标元素时返回nullptr
}
三、结语:
看完本篇文章,我们不难知道,对于插入操作,无论是红黑树还是avl树,要维持对应的“平衡”,会进行沿路径的更新,其中涉及大量的旋转操作,而红黑树较于avl树那种严格的高度差在-1到1之间,红黑树的平衡条件相对宽松,这也就大大减少了的为了维持平衡的大量旋转操作,而且还能保证效率在log(N),这也就是为啥说红黑树较于avl树更加优秀。
你赞同这个观点吗?

后续牛牛会模拟实现map和set,会在那篇文章封装红黑树,对红黑树进行改造,增加迭代器等功能。帮助友友们更加深入理解map和set容器。

相关文章:
超详细红黑树的模拟实现
前言 有人说设计出AVL树的的人是个大牛,那写红黑树(RBTree)的人就是天才! 上一篇文章,我们已经学习了AVL树,牛牛个人认为AVL树已经够优秀了,那让我们一起探究一下,为什么红黑树比AV…...
【亚马逊云科技】通过Amazon CloudFront(CDN)快速访问资源
文章目录 前言一、应用场景二、【亚马逊云科技】CloudFront(CDN)的优势三、入门使用总结 前言 前面有篇文章我们介绍了亚马逊云科技的云存储服务。云存储服务主要用于托管资源,而本篇文章要介绍的CDN则是一种对托管资源的快速访问服务&#…...

ES-ES的基本概念
ES的基本概念 一、文档 1.1 文档相关概念 ES是面向文档的,文档是所有可搜索数据的最小单位,可以对比理解为关系型数据库中的一条数据 日志文件中的一条日志信息一本电影的具体信息/一张唱片的详细信息 文档会被序列化成JSON格式保存在ES中 JSON对象由…...

排序算法——快速排序的非递归写法
快速排序的非递归 我们写快速排序的时候,通常用的递归的方法实现快速排序,那么有没有非递归的方法实现快速排序呢?肯定是有的。思想还是一样的,不过非递归是看似是非递归其实还是递归。 思路解释 快速排序的非递归使用的是栈这…...
【论文阅读】基于人工智能目标检测与跟踪技术的过冷流沸腾气泡特征提取
Bubble feature extraction in subcooled flow boiling using AI-based object detection and tracking techniques 基于人工智能目标检测与跟踪技术的过冷流沸腾气泡特征提取 期刊信息:International Journal of Heat and Mass Transfer 2024 级别:EI检…...
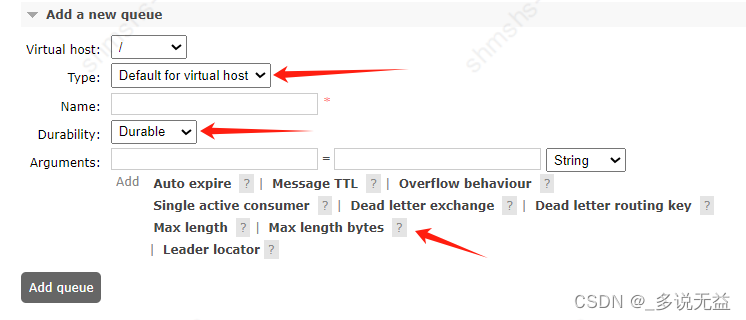
RabbitMQ讲解与整合
RabbitMq安装 类型概念 租户 RabbitMQ 中有一个概念叫做多租户,每一个 RabbitMQ 服务器都能创建出许多虚拟的消息服务器,这些虚拟的消息服务器就是我们所说的虚拟主机(virtual host),一般简称为 vhost。 每一个 vhos…...

python 基础知识点(蓝桥杯python科目个人复习计划56)
今日复习内容:做题 例题1:最小的或运算 问题描述:给定整数a,b,求最小的整数x,满足a|x b|x,其中|表示或运算。 输入格式: 第一行包括两个正整数a,b; 输出格式&#…...

【vue】vue中数据双向绑定原理/响应式原理,mvvm,mvc、mvp分别是什么
关于 vue 的原理主要有两个重要内容,分别是 mvvm 数据双向绑定原理,和 响应式原理 MVC(Model-View-Controller): Model(模型):表示应用程序的数据和业务逻辑。View(视图&…...
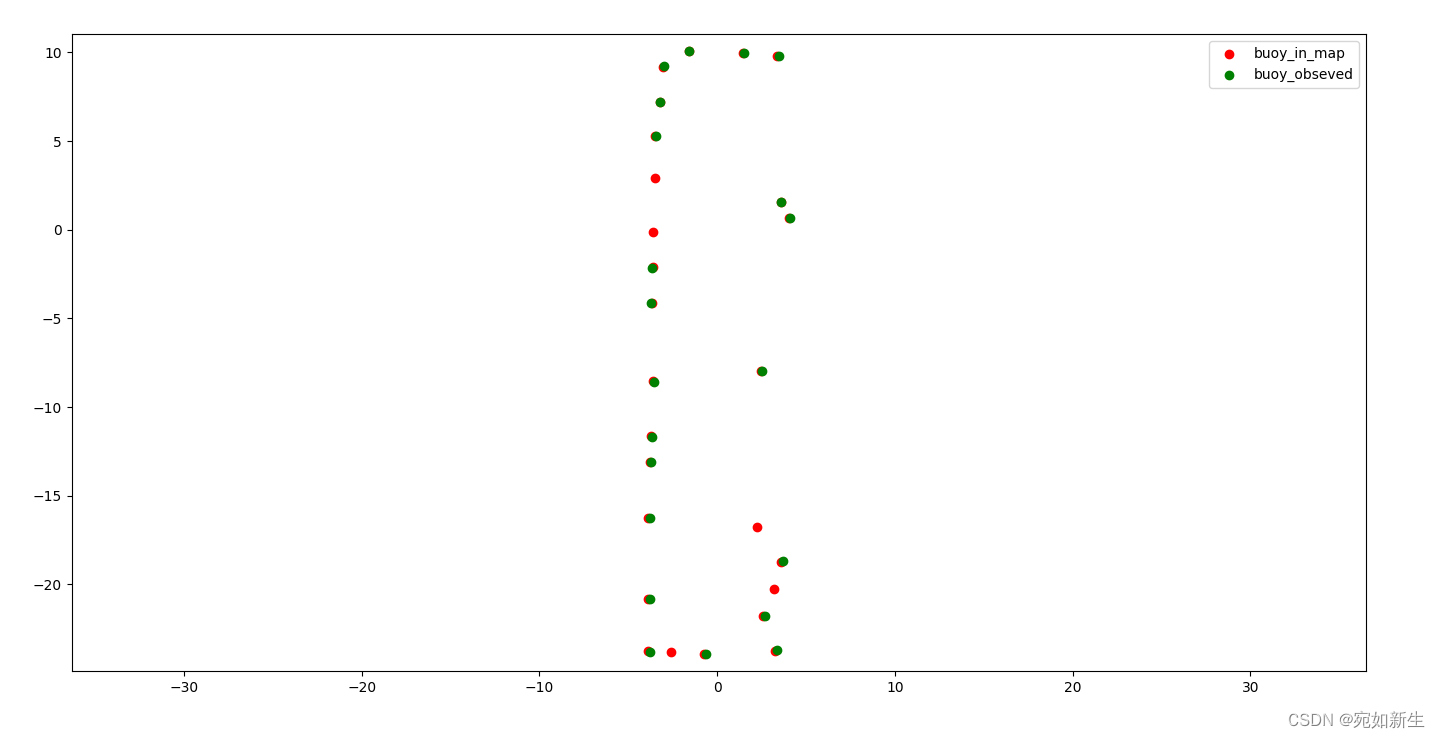
基于反光柱特征的激光定位算法思路
目录 1. 识别反光柱2. 数据关联2.1 基于几何形状寻找匹配2.2 暴力寻找匹配 3. 位姿估计(最小二乘求解)4. 问题4.1 精度问题4.2 快速旋转时定位较差 1. 识别反光柱 反光柱是特殊材料制成,根据激光雷达对反光材料扫描得到的反射值来提取特征。…...

CSM是什么意思?
CSM(Customer Service Management)是企业客户服务管理的信息化(IT)解决方案架构。本着以客户为中心的管理理念,搭建企业客户服务管理平台,实现企业以客户为中心的管理时代的竞争战略。 CSM的核心是以客户为中心,实现对…...

ES6 面试题
1. const、let 和 var 的区别是什么? 答案: var 声明的变量是函数作用域或全局作用域,而 const 和 let 声明的变量是块级作用域。使用 var 声明的变量可以被重复声明,而 const 和 let 不允许重复声明同一变量。const 声明的变量…...
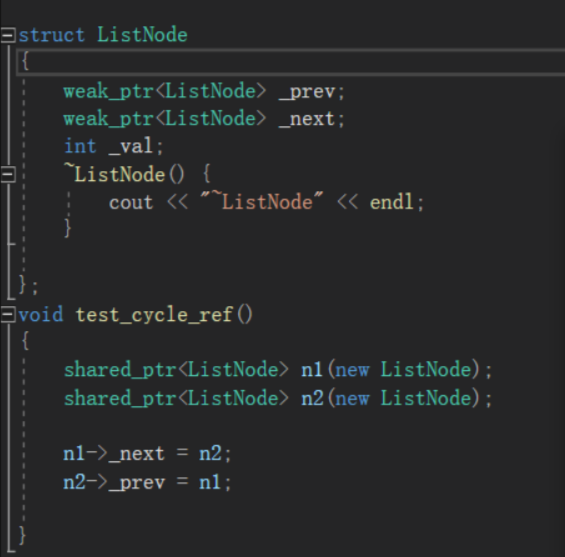
智能指针(C++)
目录 一、智能指针是什么 二、为什么需要智能指针 三、智能指针的使用和原理 3.1、RALL 3.2 智能指针的原理 3.3、智能指针的分类 3.3.1、auto_ptr 3.3.2、unique_ptr 3.3.3、shared_ptr 3.2.4、weak_ptr 一、智能指针是什么 在c中,动态内存的管理式通过一…...

社区店商业模式探讨:如何创新并持续盈利?
在竞争激烈的商业环境中,社区店要想获得成功并持续盈利,需要不断创新和优化商业模式。 作为一名开鲜奶吧5年的创业者,我将分享一些关于社区店商业模式创新的干货和见解,希望能给想开实体店或创业的朋友们提供有价值的参考。 1、…...
一些可以访问gpt的方式
1、Coze扣子是新一代 AI 大模型智能体开发平台。整合了插件、长短期记忆、工作流、卡片等丰富能力,扣子能帮你低门槛、快速搭建个性化或具备商业价值的智能体,并发布到豆包、飞书等各个平台。https://www.coze.cn/ 2、https://poe.com/ 3、插件阿里…...

springer模板参考文献不显示
Spring期刊模板网站,我的问题是23年12月的版本 https://www.springernature.com/gp/authors/campaigns/latex-author-support/see-where-our-services-will-take-you/18782940 参考文献显示问好,在sn-article.tex文件中,这个sn-mathphys-num…...
【【C语言简单小题学习-1】】
实现九九乘法表 // 输出乘法口诀表 int main() {int i 0;int j 0;for (i 1; i < 9; i){for (j 1; j < i;j)printf("%d*%d%d ", i , j, i*j);printf("\n"); }return 0; }猜数字的游戏设计 #define _CRT_SECURE_NO_WARNINGS 1 #include<stdi…...
mongoDB 优化(1)索引
1、创建复合索引(多字段) db.collection_test1.createIndex({deletedVersion: 1,param: 1,qrYearMonth: 1},{name: "deletedVersion_1_param_1_qrYearMonth_1",background: true} ); 2、新增索引前: 执行查询: mb.r…...

stable diffusion webUI之赛博菩萨【秋葉】——工具包新手安裝与使用教程
stable diffusion webUI之赛博菩萨【秋葉】——工具包新手安裝与使用教程 AI浪潮袭来,还是学习学习为妙赛博菩萨【秋葉】简介——(葉ye,四声,同叶)A绘世启动器.exe(sd-webui-aki-v4.6.x)工具包安…...

鸿蒙应用程序包安装和卸载流程
开发者 开发者可以通过调试命令进行应用的安装和卸载,可参考多HAP的调试流程。 图1 应用程序包安装和卸载流程(开发者) 多HAP的开发调试与发布部署流程 多HAP的开发调试与发布部署流程如下图所示。 图1 多HAP的开发调试与发布部署流程 …...

C语言数组全面解析:从初学到精通
数组 1. 前言2. 一维数组的创建和初始化3. 一维数组的使用4. 一维数组在内存中的存储5. 二维数组的创建和初始化6. 二维数组的使用7. 二维数组在内存中的存储8. 数组越界9. 数组作为函数参数10. 综合练习10.1 用函数初始化,逆置,打印整型数组10.2 交换两…...

OpenClaw 系统环境配置大全|Windows、macOS、Linux 三大平台逐项实操
本系列第五篇:三大平台全覆盖——从 WSL2 到 Homebrew,让 OpenClaw 在任意操作系统上稳定运行 在上一篇中,我们完成了跨平台的环境预检清单。但实际操作中,Windows、macOS 和 Linux 三者在系统配置层面有着本质差异——权限体系不同、命令工具不同、网络环境不同。 这篇文…...

Hotkey Detective:三分钟定位Windows热键冲突的智能侦探
Hotkey Detective:三分钟定位Windows热键冲突的智能侦探 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 当你在…...

【Blazor 2026终极前瞻】:微软架构师内部流出的5大不可逆演进趋势,错过将掉队Web开发下一代标准
第一章:Blazor 2026演进全景图:从WebAssembly到统一运行时范式Blazor 在 2026 年迎来关键性架构跃迁——.NET 运行时团队正式将 WebAssembly(WASM)宿主、Server 模式与 Hybrid 模式收敛至统一的跨平台运行时抽象层(Uni…...

5分钟玩转nanobot:超轻量级AI助手的多场景使用体验
5分钟玩转nanobot:超轻量级AI助手的多场景使用体验 1. 初识nanobot:轻量级AI助手新选择 如果你正在寻找一个既强大又轻便的AI助手,nanobot绝对值得一试。这个基于Qwen3-4B-Instruct-2507模型的AI助手,整个系统仅需约4000行代码&…...

S2-Pro大模型WSL2深度学习环境搭建与模型部署避坑指南
S2-Pro大模型WSL2深度学习环境搭建与模型部署避坑指南 1. 前言:为什么选择WSL2进行AI开发 如果你是一名Windows用户,想要在本地运行S2-Pro这样的大模型,WSL2可能是最方便的选择。相比虚拟机或双系统,WSL2提供了接近原生Linux的性…...

Swoole 5.0适配踩坑实录,深度解析协程生命周期变更、内存管理新规与RPC协议不兼容问题
第一章:Swoole 5.0升级适配全景概览Swoole 5.0 是一次面向现代化 PHP 协程生态的重大演进,彻底移除对传统同步阻塞 API 的兼容包袱,全面拥抱协程原生化设计。其核心变化涵盖事件循环重构、协程调度器强化、HTTP/Server 接口标准化,…...

集合、元素、隶属与包含:知识分类的数学基础
在知识表示与知识图谱中,分类并不是随意进行的。无论是区分类与实例,还是建立上位类与下位类,背后都需要一种更基础的结构来支撑,这就是集合观念。集合、元素、隶属关系、包含关系与相等关系,构成了知识分类最基本的数…...

Java 微服务弹性模式:构建高可用分布式系统
Java 微服务弹性模式:构建高可用分布式系统今天我们来聊聊 Java 微服务中的弹性模式,这是构建高可用分布式系统的核心能力。一、为什么需要弹性模式 在分布式系统中,故障是不可避免的。网络延迟、服务宕机、资源耗尽等问题随时可能发生。如果…...

机械设计行业SolidWorks许可证资源池化共享分点方案
SolidWorks许可证资源池化共享,真的不光是“打游戏占号”你是不光是也总归撞上这种场景?项目上线前一晚,全部工程师全在争抢SolidWorks许可证,结果有人抢到了,有人还要靠“临时借”拿个“邮件恳求”的结果。可你抬头看…...

腾讯后端开发面经:一面 3 道算法压 30 分钟,二面开始全是场景题
腾讯后端开发面经:一面 3 道算法压 30 分钟,二面开始全是场景题 腾讯后端的面试,压强来得很快。 很多公司的节奏是:先聊项目,再问八股,最后来一道算法题。 腾讯不是。 这次整理到的一份真实面经里&#…...