曲线生成 | 图解Dubins曲线生成原理(附ROS C++/Python/Matlab仿真)
目录
- 0 专栏介绍
- 1 什么是Dubins曲线?
- 2 Dubins曲线原理
- 2.1 坐标变换
- 2.2 单步运动公式
- 2.3 曲线模式
- 3 Dubins曲线生成算法
- 4 仿真实现
- 4.1 ROS C++实现
- 4.2 Python实现
- 4.3 Matlab实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
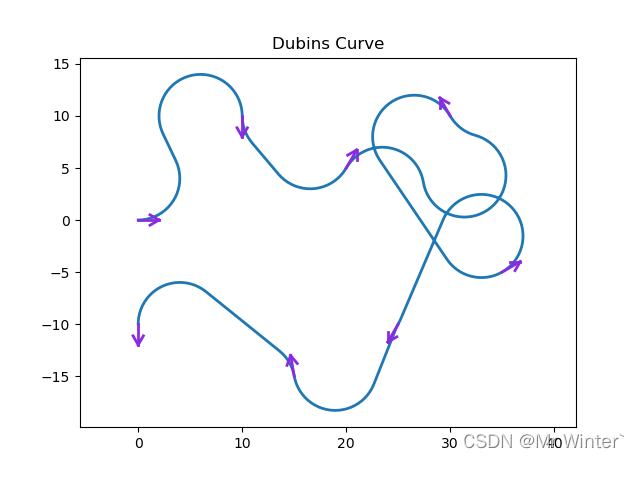
1 什么是Dubins曲线?
Dubins曲线是指由美国数学家 Lester Dubins 在20世纪50年代提出的一种特殊类型的最短路径曲线。这种曲线通常用于描述在给定转弯半径下的无人机、汽车或船只等载具的最短路径,其特点是起始点和终点处的切线方向和曲率都是已知的。

Dubins曲线包括直线段和最大转弯半径下的圆弧组成,通过合适的组合可以实现从一个姿态到另一个姿态的最短路径规划。这种曲线在航空、航海、自动驾驶等领域具有广泛的应用,能够有效地规划航行路径,减少能量消耗并提高效率。
2 Dubins曲线原理
2.1 坐标变换
如图所示,在全局坐标系 x O y xOy xOy中,设机器人起始位姿、终止位姿、最小转弯半径分别为 ( x s , y s , α ) \left( x_s,y_s,\alpha \right) (xs,ys,α)、 ( x g , y g , β ) \left( x_g,y_g,\beta \right) (xg,yg,β)与 R R R,则以 p s = ( x s , y s ) \boldsymbol{p}_s=\left( x_s,y_s \right) ps=(xs,ys)为新坐标系原点, p s \boldsymbol{p}_s ps指向 p g = ( x g , y g ) \boldsymbol{p}_g=\left( x_g,y_g \right) pg=(xg,yg)方向为 x ′ x' x′轴,垂直方向为 y ′ y' y′轴建立新坐标系 x ′ O ′ y ′ x'O'y' x′O′y′。
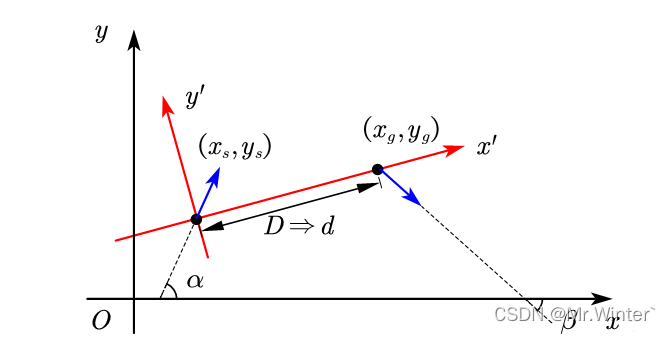
根据比例关系 d / D = r / R {{d}/{D}}={{r}/{R}} d/D=r/R,其中 D = ∥ p s − p g ∥ 2 D=\left\| \boldsymbol{p}_s-\boldsymbol{p}_g \right\| _2 D= ps−pg 2。为了便于后续推导,不妨归一化最小转弯半径,即令 r = 1 r=1 r=1。所以在坐标系 x ′ O ′ y ′ x'O'y' x′O′y′中,通常取起点、终点间距为 d = D / R d={{D}/{R}} d=D/R,从而起始位姿、终止位姿、最小转弯半径分别转换为
s t a r t = [ 0 0 α − θ ] T , g o a l = [ d 0 β − θ ] T , r = 1 \mathrm{start}=\left[ \begin{matrix} 0& 0& \alpha -\theta\\\end{matrix} \right] ^T, \mathrm{goal}=\left[ \begin{matrix} d& 0& \beta -\theta\\\end{matrix} \right] ^T, r=1 start=[00α−θ]T,goal=[d0β−θ]T,r=1
其中 θ = a r c tan ( ( y g − y s ) / ( x g − x s ) ) \theta =\mathrm{arc}\tan \left( {{\left( y_g-y_s \right)}/{\left( x_g-x_s \right)}} \right) θ=arctan((yg−ys)/(xg−xs)),接下来的推导均基于转换坐标系 x ′ O ′ y ′ x'O'y' x′O′y′。
2.2 单步运动公式
对于直行运动,设沿直线行进距离为 l l l,则
[ x ∗ y ∗ ϕ ∗ ] T = [ x + l cos ϕ y + l sin ϕ ϕ ] T \left[ \begin{matrix} x^*& y^*& \phi ^*\\\end{matrix} \right] ^T=\left[ \begin{matrix} x+l\cos \phi& y+l\sin \phi& \phi\\\end{matrix} \right] ^T [x∗y∗ϕ∗]T=[x+lcosϕy+lsinϕϕ]T
对于转弯运动,假设转向角为 ψ \psi ψ,则由弧长公式可得
l = ψ r = r = 1 ψ l=\psi r\xlongequal{r=1}\psi l=ψrr=1ψ
因此设沿圆弧行进距离为 l l l,以左转为例,由几何关系易得
[ x ∗ y ∗ ϕ ∗ ] T = [ x + r sin ( ϕ + ψ ) − r sin ( ϕ ) y + r cos ( ϕ + ψ ) + r cos ( ϕ ) ϕ + ψ ] T \left[ \begin{matrix} x^*& y^*& \phi ^*\\\end{matrix} \right] ^T=\left[ \begin{matrix} x+r\sin \left( \phi +\psi \right) -r\sin \left( \phi \right)& y+r\cos \left( \phi +\psi \right) +r\cos \left( \phi \right)& \phi +\psi\\\end{matrix} \right] ^T [x∗y∗ϕ∗]T=[x+rsin(ϕ+ψ)−rsin(ϕ)y+rcos(ϕ+ψ)+rcos(ϕ)ϕ+ψ]T
代入 r = 1 r=1 r=1、 ψ = l \psi=l ψ=l可得
[ x ∗ y ∗ ϕ ∗ ] T = [ x + sin ( ϕ + l ) − sin ( ϕ ) y + cos ( ϕ + l ) + cos ( ϕ ) ϕ + l ] T \left[ \begin{matrix} x^*& y^*& \phi ^*\\\end{matrix} \right] ^T=\left[ \begin{matrix} x+\sin \left( \phi +l \right) -\sin \left( \phi \right)& y+\cos \left( \phi +l \right) +\cos \left( \phi \right)& \phi +l\\\end{matrix} \right] ^T [x∗y∗ϕ∗]T=[x+sin(ϕ+l)−sin(ϕ)y+cos(ϕ+l)+cos(ϕ)ϕ+l]T
同理,对于右转而言,有
[ x ∗ y ∗ ϕ ∗ ] T = [ x − sin ( ϕ − l ) + sin ( ϕ ) y + cos ( ϕ + l ) − cos ( ϕ ) ϕ − l ] T \left[ \begin{matrix} x^*& y^*& \phi ^*\\\end{matrix} \right] ^T=\left[ \begin{matrix} x-\sin \left( \phi -l \right) +\sin \left( \phi \right)& y+\cos \left( \phi +l \right) -\cos \left( \phi \right)& \phi -l\\\end{matrix} \right] ^T [x∗y∗ϕ∗]T=[x−sin(ϕ−l)+sin(ϕ)y+cos(ϕ+l)−cos(ϕ)ϕ−l]T
综上所述,可得单步运动映射
{ L l + ( x , y , ϕ ) = [ x + sin ( ϕ + l ) − sin ( ϕ ) y − cos ( ϕ + l ) + cos ( ϕ ) ϕ + l ] T R l + ( x , y , ϕ ) = [ x − sin ( ϕ − l ) + sin ( ϕ ) y + cos ( ϕ − l ) − cos ( ϕ ) ϕ − l ] T S l + ( x , y , ϕ ) = [ x + l cos ϕ y + l sin ϕ ϕ ] T \begin{cases} L_{l}^{+}\left( x,y,\phi \right) =\left[ \begin{matrix} x+\sin \left( \phi +l \right) -\sin \left( \phi \right)& y-\cos \left( \phi +l \right) +\cos \left( \phi \right)& \phi +l\\\end{matrix} \right] ^T\\ R_{l}^{+}\left( x,y,\phi \right) =\left[ \begin{matrix} x-\sin \left( \phi -l \right) +\sin \left( \phi \right)& y+\cos \left( \phi -l \right) -\cos \left( \phi \right)& \phi -l\\\end{matrix} \right] ^T\\ S_{l}^{+}\left( x,y,\phi \right) =\left[ \begin{matrix} x+l\cos \phi& y+l\sin \phi& \phi\\\end{matrix} \right] ^T\\\end{cases} ⎩ ⎨ ⎧Ll+(x,y,ϕ)=[x+sin(ϕ+l)−sin(ϕ)y−cos(ϕ+l)+cos(ϕ)ϕ+l]TRl+(x,y,ϕ)=[x−sin(ϕ−l)+sin(ϕ)y+cos(ϕ−l)−cos(ϕ)ϕ−l]TSl+(x,y,ϕ)=[x+lcosϕy+lsinϕϕ]T
2.3 曲线模式
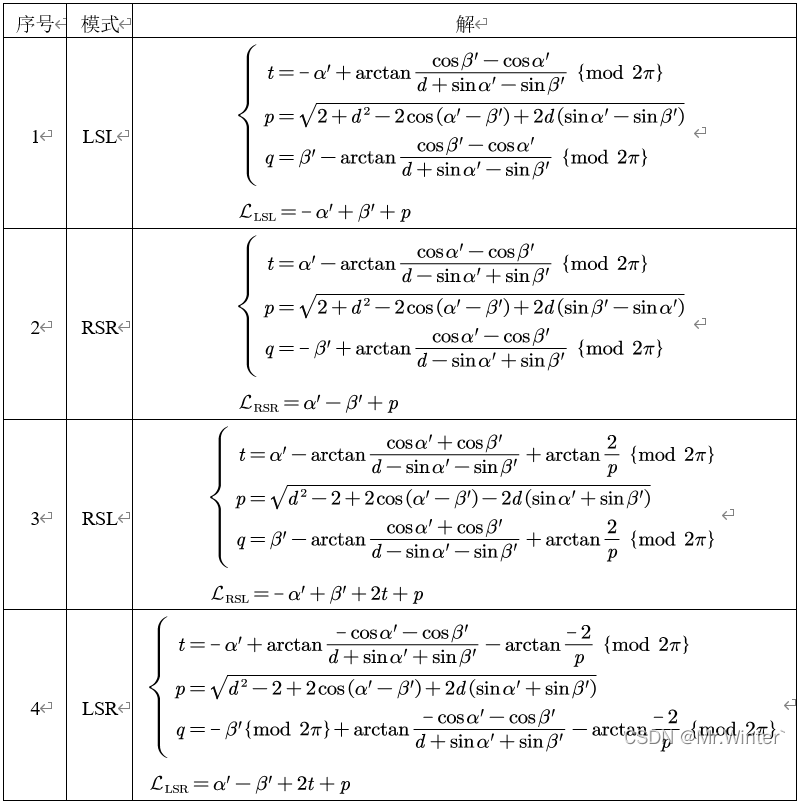
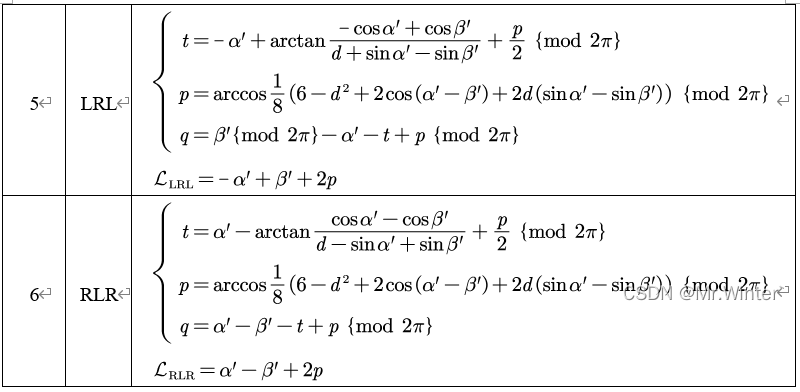
Dubins曲线假设物体只能向前,通过组合左转、右转、直行可得六种运动模式
{ L S L , R S R , R S L , L S R , R L R , L R L } \left\{ LSL, RSR, RSL, LSR, RLR, LRL \right\} {LSL,RSR,RSL,LSR,RLR,LRL}
可以总结这六种运动模式的解析解为
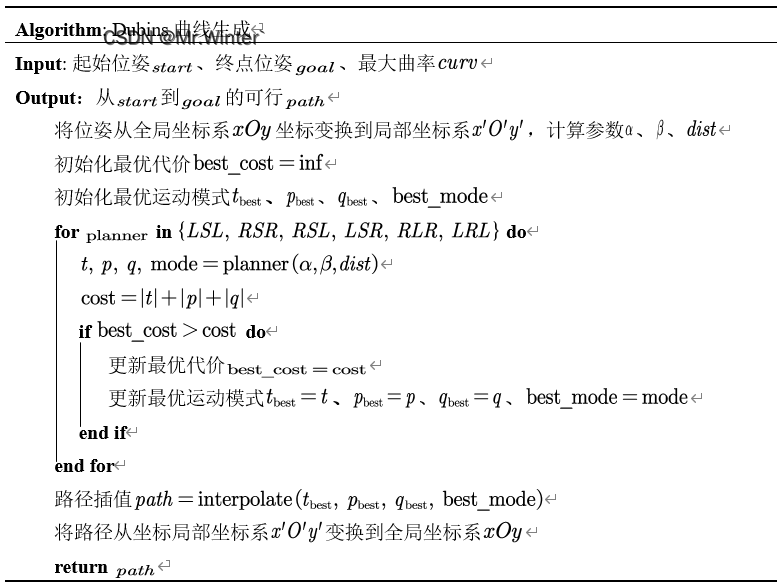
3 Dubins曲线生成算法
Dubins曲线路径生成算法流程如表所示
4 仿真实现
4.1 ROS C++实现
核心代码如下所示
Points2d Dubins::generation(Pose2d start, Pose2d goal)
{Points2d path;double sx, sy, syaw;double gx, gy, gyaw;std::tie(sx, sy, syaw) = start;std::tie(gx, gy, gyaw) = goal;// coordinate transformationgx -= sx;gy -= sy;double theta = helper::mod2pi(atan2(gy, gx));double dist = hypot(gx, gy) * max_curv_;double alpha = helper::mod2pi(syaw - theta);double beta = helper::mod2pi(gyaw - theta);// select the best motionDubinsMode best_mode;double best_cost = DUBINS_MAX;DubinsLength length;DubinsLength best_length = { DUBINS_NONE, DUBINS_NONE, DUBINS_NONE };DubinsMode mode;for (const auto solver : dubins_solvers){(this->*solver)(alpha, beta, dist, length, mode);_update(length, mode, best_length, best_mode, best_cost);}if (best_cost == DUBINS_MAX)return path;// interpolation...// coordinate transformationEigen::AngleAxisd r_vec(theta, Eigen::Vector3d(0, 0, 1));Eigen::Matrix3d R = r_vec.toRotationMatrix();Eigen::MatrixXd P = Eigen::MatrixXd::Ones(3, path_x.size());for (size_t i = 0; i < path_x.size(); i++){P(0, i) = path_x[i];P(1, i) = path_y[i];}P = R * P;for (size_t i = 0; i < path_x.size(); i++)path.push_back({ P(0, i) + sx, P(1, i) + sy });return path;
}
4.2 Python实现
核心代码如下所示
def generation(self, start_pose: tuple, goal_pose: tuple):sx, sy, syaw = start_posegx, gy, gyaw = goal_pose# coordinate transformationgx, gy = gx - sx, gy - sytheta = self.mod2pi(math.atan2(gy, gx))dist = math.hypot(gx, gy) * self.max_curvalpha = self.mod2pi(syaw - theta)beta = self.mod2pi(gyaw - theta)# select the best motionplanners = [self.LSL, self.RSR, self.LSR, self.RSL, self.RLR, self.LRL]best_t, best_p, best_q, best_mode, best_cost = None, None, None, None, float("inf")for planner in planners:t, p, q, mode = planner(alpha, beta, dist)if t is None:continuecost = (abs(t) + abs(p) + abs(q))if best_cost > cost:best_t, best_p, best_q, best_mode, best_cost = t, p, q, mode, cost# interpolation...# coordinate transformationrot = Rot.from_euler('z', theta).as_matrix()[0:2, 0:2]converted_xy = rot @ np.stack([x_list, y_list])x_list = converted_xy[0, :] + sxy_list = converted_xy[1, :] + syyaw_list = [self.pi2pi(i_yaw + theta) for i_yaw in yaw_list]return best_cost, best_mode, x_list, y_list, yaw_list
4.3 Matlab实现
核心代码如下所示
function [x_list, y_list, yaw_list] = generation(start_pose, goal_pose, param)sx = start_pose(1); sy = start_pose(2); syaw = start_pose(3);gx = goal_pose(1); gy = goal_pose(2); gyaw = goal_pose(3);% coordinate transformationgx = gx - sx; gy = gy - sy;theta = mod2pi(atan2(gy, gx));dist = hypot(gx, gy) * param.max_curv;alpha = mod2pi(syaw - theta);beta = mod2pi(gyaw - theta);% select the best motionplanners = ["LSL", "RSR", "LSR", "RSL", "RLR", "LRL"];best_cost = inf;best_segs = [];best_mode = [];for i=1:length(planners)planner = str2func(planners(i));[segs, mode] = planner(alpha, beta, dist);if isempty(segs)continueendcost = (abs(segs(1)) + abs(segs(2)) + abs(segs(3)));if best_cost > costbest_segs = segs;best_mode = mode;best_cost = cost;endend% interpolation...% coordinate transformationrot = [cos(theta), -sin(theta); sin(theta), cos(theta)];converted_xy = rot * [x_list; y_list];x_list = converted_xy(1, :) + sx;y_list = converted_xy(2, :) + sy;for j=1:length(yaw_list)yaw_list(j) = pi2pi(yaw_list(j) + theta);end
end

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
曲线生成 | 图解Dubins曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 什么是Dubins曲线?2 Dubins曲线原理2.1 坐标变换2.2 单步运动公式2.3 曲线模式 3 Dubins曲线生成算法4 仿真实现4.1 ROS C实现4.2 Python实现4.3 Matlab实现 0 专栏介绍 🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、…...

「Vue3系列」Vue3 组件
文章目录 一、Vue3 组件二、Vue3 组件实例三、Vue3 官方组件四、Vue3 常用组件五、相关链接 一、Vue3 组件 Vue3 是 Vue.js 的最新版本,它引入了许多新的特性和改进。在 Vue3 中,组件是构建应用程序的核心部分,它们可以重用、组合和嵌套。Vu…...
Git实战(2)
git work flow ------------------------------------------------------- ---------------------------------------------------------------- 场景问题及处理 问题1:最近提交了 a,b,c,d记录,想把b记录删掉其他提交记录保留: git reset …...
Java ElasticSearch-Linux面试题
Java ElasticSearch-Linux面试题 前言1、守护线程的作用?2、链路追踪Skywalking用过吗?3、你对G1收集器了解吗?4、你们项目用的什么垃圾收集器?5、内存溢出和内存泄露的区别?6、什么是Spring Cloud Bus?7、…...

微信小程序通过服务器控制ESP8266
声明 本文实现了ESP8266、微信小程序、个人服务器三者互相通信,并且小程序能发消息给微信用户 本文所有代码和步骤均为亲测有效 以下代码均为从网上搜索到后本人加以改动的,并非完全原创,若作者希望删除可联系我 ESP8266与个人服务器通信 ESP8266配置 通过串口通信使用…...

题目 1434: 蓝桥杯历届试题-回文数字
题目描述: 观察数字:12321,123321 都有一个共同的特征,无论从左到右读还是从右向左读,都是相同的。这样的数字叫做:回文数字。 本题要求你找到一些5位或6位的十进制数字。满足如下要求: 该数字的各个数位…...

访问修饰符、Object(方法,使用、equals)、查看equals底层、final--学习JavaEE的day15
day15 一、访问修饰符 含义: 修饰类、方法、属性,定义使用的范围 理解:给类、方法、属性定义访问权限的关键字 注意: 1.修饰类只能使用public和默认的访问权限 2.修饰方法和属性可以使用所有的访问权限 访问修饰符本类本包…...
的性能(来自OpenAI DevDay 会议))
『大模型笔记』最大化大语言模型(LLM)的性能(来自OpenAI DevDay 会议)
最大化大语言模型(LLM)的性能(来自OpenAI DevDay 会议) 文章目录 一. 内容介绍1.1. 优化的两个方向(上下文优化和LLM优化)1.2. 提示工程:从哪里开始1.3. 检索增强生成:拓展知识边界1.4. 微调:专属定制二. 参考文献一. 内容介绍 简述如何以可扩展的方式把大语言模型(LLMs)…...

深度学习:开启你的AI探索之旅
在这个信息爆炸的时代,人工智能(AI)已经渗透到我们生活的方方面面,从智能语音助手到自动驾驶汽车,从智能推荐系统到医疗影像诊断,AI的身影无处不在。而深度学习,作为AI领域的一大核心技术,更是引领着这场科技革命的浪潮。那么,如何入门深度学习,踏上这趟充满挑战与机…...
第十四届蓝桥杯大赛B组 JAVA 蜗牛 (递归剪枝)
题目描述: 这天,一只蜗牛来到了二维坐标系的原点。 在 x 轴上长有 n 根竹竿。它们平行于 y 轴,底部纵坐标为 0,横坐标分别为 x1, x2, …, xn。竹竿的高度均为无限高,宽度可忽略。蜗牛想要从原点走到第 n 个竹竿的底部也…...
基于React低代码平台开发:构建高效、灵活的应用新范式
文章目录 一、React与低代码平台的结合优势二、基于React的低代码平台开发挑战三、基于React的低代码平台开发实践四、未来展望《低代码平台开发实践:基于React》编辑推荐内容简介作者简介目录前言为什么要写这本书 读者对象如何阅读本书 随着数字化转型的深入&…...
)
在Linux部署Docker并上传静态资源(快速教程)
Nginx快速上手 安装必要的软件包 yum install -y yum-utils device-mapper-persistent-data lvm2设置Docker仓库 通过以下命令添加Docker的官方仓库到yum源中: yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo安装Dock…...

【场景测试用例】带有广告图案的纸杯
从以下几个纬度出发考虑: 功能 是否可以承载液体,热水,温水,冰水是否可以承载非液体类的物品容量,空杯,半杯,满杯 UI 广告图案设计是否合理 性能 最大承受的容量内不漏水(负载测试)最大承受的温…...
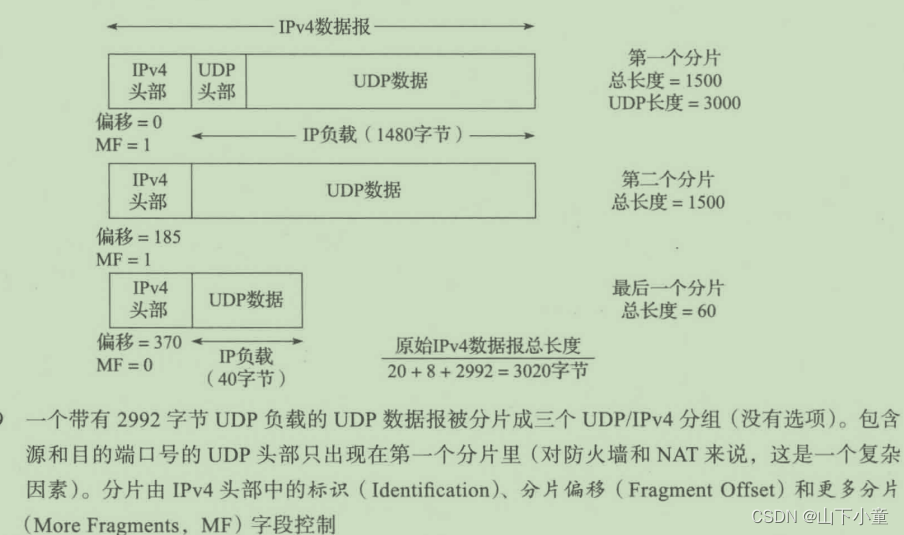
《TCP/IP详解 卷一》第10章 UDP 和 IP 分片
目录 10.1 引言 10.2 UDP 头部 10.3 UDP校验和 10.4 例子 10.5 UDP 和 IPv6 10.6 UDP-Lite 10.7 IP分片 10.7.1 例子:IPV4 UDP分片 10.7.2 重组超时 10.8 采用UDP的路径MTU发现 10.9 IP分片和ARP/ND之间的交互 10.10 最大UDP数据报长度 10.11 UDP服务器…...
MyBatisPlus(SpringBoot版)的分页插件
目录 一、前置工作: 1.整体项目目录结构 2.创建普通javamaven项目。 3.导入依赖,改造成springboot项目 4.配置启动类 5.创建service接口及其实现类 6.创建接口Mapper 7.配置数据源 8.创建数据库表 二、使用MP(mybatisplus)的分页插件 二、使…...
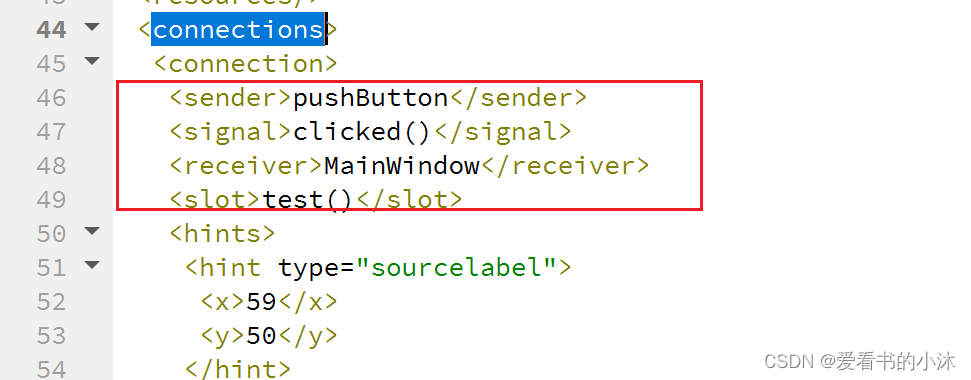
【小沐学QT】QT学习之信号槽使用
文章目录 1、简介2、代码实现2.1 界面菜单“转到槽”方法2.2 界面信号槽编辑器方法2.3 QT4.0的绑定方法2.4 QT5.0之后的绑定方法2.5 C11的方法2.6 lamda表达式方法2.7 QSignalMapper方法 结语 1、简介 在GUI编程中,当我们更改一个小部件时,我们通常希望…...

SpringMVC总结
SpringMVC SpringMVC是隶属于Spring框架的一部分,主要是用来进行Web开发,是对Servlet进行了封装。 对于SpringMVC我们主要学习如下内容: SpringMVC简介 请求与响应 REST风格 SSM整合(注解版) 拦截器 SpringMVC是处理Web层/表现层的框架ÿ…...

JS一些重要函数
防抖函数 避免短时间内的函数多次调用影响性能 function debounce(func , wait){let timer;return (...args) > {clearTimeout(timer);timer setTimeout(() > {return func(args)} , wait)} } 函数柯里化 将多参函数以单参的形式传递 function curry(fn){return func…...

基于视觉识别的自动采摘机器人设计与实现
一、前言 1.1 项目介绍 【1】项目功能介绍 随着科技的进步和农业现代化的发展,农业生产效率与质量的提升成为重要的研究对象。其中,果蔬采摘环节在很大程度上影响着整个产业链的效益。传统的手工采摘方式不仅劳动强度大、效率低下,而且在劳…...

算法D32 | 贪心算法2 | 122.买卖股票的最佳时机II 55. 跳跃游戏 45.跳跃游戏II
122.买卖股票的最佳时机II 本题解法很巧妙,大家可以看题思考一下,在看题解。 代码随想录P 只收集每天的正利润,利润可以每天分解。 Python: class Solution:def maxProfit(self, prices: List[int]) -> int:if len(prices)<2: retur…...

C#中Activator的具体使用
Activator 是 C# 中用于动态创建对象实例的核心类,位于 System 命名空间。它通过**反射(Reflection)**机制,在运行时根据类型信息创建对象,而无需在编译时知道具体类型。🔍 一、Activator的核心作用在不知道…...

AArch64架构下非缓存内存的指令缓存机制解析
1. AArch64架构下非缓存正常内存的指令缓存机制解析在Armv8-A和Armv9-A架构的AArch64执行状态下,关于指令缓存(Instruction Cache)如何处理非缓存(Non-cacheable)内存区域的指令访问,存在一个值得深入探讨的技术细节。这个问题直接关系到处理器对内存访问…...

统计学习赋能移动边缘计算:智能网络调度实战解析
1. 项目概述:当边缘计算遇上动态网络,我们如何“聪明”地调度?在移动互联网和物联网应用爆炸式增长的今天,你有没有遇到过这样的场景:在拥挤的地铁里刷短视频,画面却卡顿、加载缓慢;或者&#x…...

UE5 GPU崩溃真相:Windows TCC超时机制与注册表调优指南
1. 为什么UE5项目一跑就GPU崩溃,而系统却说“显卡没出问题”?你刚在UE5里搭好一个带Niagara粒子Lumen全局光照的场景,点下Play,画面卡住两秒,然后整个编辑器黑屏、崩溃,任务管理器里UnrealEditor进程直接消…...
)
CentOS 7上解决soffice转换doc到docx报错‘no export filter‘的完整指南(附字体安装)
CentOS 7服务器深度修复:soffice文档转换no export filter全链路解决方案当你在CentOS 7服务器上执行soffice --convert-to docx命令时,终端突然抛出Error: no export filter的红色警告——这不是简单的命令错误,而是典型的环境依赖链断裂。作…...

Playwright 浏览器自动化完全指南:从入门到实战
目录 一、什么是 Playwright二、Playwright vs Selenium:为什么选择 Playwright三、支持的语言与浏览器四、核心架构与执行流程五、环境安装与验证六、第一个程序:打开网页并截图七、常用操作速查八、元素定位详解九、自动等待机制深度解析十、浏览器上…...

五轴联动机床:什么叫真正做出来了,什么叫组装贴牌
机床厂的数量从来不是问题。打开任何一份机床企业名录,数以千计的厂商密密麻麻排在那里,官网上都写着"五轴联动"“高精度数控”“航空级加工”。但做五轴联动整机与自主数控系统的工厂,放到整个行业里只是极小的一部分;…...
的转矩分配函数(TSF)控制仿真)
手把手教你学 Simulink-- 开关磁阻电机(SRM)的转矩分配函数(TSF)控制仿真
目录 手把手教你学 Simulink-- 开关磁阻电机(SRM)的转矩分配函数(TSF)控制仿真 🔥 前言:为什么选 SRM+TSF? 一、SRM 基础:12/8 极结构与数学模型 1.1 电压方程(第 k 相) 1.2 转矩方程(强非线性) 二、TSF 核心原理:一句话讲透 2.1 四种常用 TSF 公式(含参数…...

使用Python为你的数据分析脚本添加Taotoken大模型智能总结功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Python为你的数据分析脚本添加Taotoken大模型智能总结功能 在数据分析工作中,生成图表后,我们常常需要…...

无授权不感知、无穿戴可溯源:无感定位重构公安新型治安底座
无授权不感知、无穿戴可溯源:无感定位重构公安新型治安底座镜像视界浙江科技有限公司依托国家十四五重点课题研究成果、镜像视界浙江普陀时空大数据应用技术联合研究院联合研发体系与河南省电检院权威认证资质,以自研空间计算技术为根基打磨无感定位体系…...