numpy数组与矩阵运算(二)
文章目录
- 矩阵生成与常用操作
- 矩阵生成
- 矩阵转置
- 查看矩阵特性
- 矩阵乘法
- 计算相关系数矩阵
- 计算方差、协方差、标准差
- 计算特征值与特征向量
- 计算逆矩阵
- 求解线性方程组
- 奇异值分解
- 函数向量化
矩阵生成与常用操作
矩阵生成
扩展库numpy中提供的matrix()函数可以用来把列表、元组、range对象等Python可迭代对象转换为矩阵。
>>> import numpy as np
>>> x=np.matrix([[1,2,3],[4,5,6]])
>>> y=np.matrix([1,2,3,4,5,6])
>>> # 对矩阵x来说,x[1,1]和x[1][1]的含义不一样
>>> x
matrix([[1, 2, 3],[4, 5, 6]])
>>> y
matrix([[1, 2, 3, 4, 5, 6]])
>>> x[1,1]
5
矩阵转置
>>> x.T
matrix([[1, 4],[2, 5],[3, 6]])
>>> y.T
matrix([[1],[2],[3],[4],[5],[6]])
查看矩阵特性
>>> x=np.matrix([[1,2,3],[4,5,6]])
>>> x.mean() # 所有元素平均值
3.5
>>> x.mean(axis=0) # 纵向平均值
matrix([[2.5, 3.5, 4.5]])
>>> x.mean(axis=1) # 横向平均值
matrix([[2.],[5.]])
>>> x.sum() # 所有元素之和
21
>>> x.max(axis=1) # 横向最大值
matrix([[3],[6]])
>>> x.argmax(axis=1) # 横向最大值下标
matrix([[2],[2]], dtype=int64)
>>> x.diagonal() # 对角线元素
matrix([[1, 5]])
>>> x.nonzero() # 非0元素下标
(array([0, 0, 0, 1, 1, 1], dtype=int64), array([0, 1, 2, 0, 1, 2], dtype=int64))
>>> # 行下标列表和列下标列表
矩阵乘法
一个mxp的矩阵和一个pxn的矩阵,它们的乘积为一个mxn的矩阵
>>> x=np.matrix([[1,2,3],[4,5,6]])
>>> y=np.matrix([[1,2],[3,4],[5,6]])
>>> x*y
matrix([[22, 28],[49, 64]])
计算相关系数矩阵
>>> np.corrcoef([1,2,3,4],[4,3,2,1]) # 负相关,变化反向相反
array([[ 1., -1.],[-1., 1.]])
>>> np.corrcoef([1,2,3,4],[8,3,2,1]) # 负相关,变化反向相反
array([[ 1. , -0.91350028],[-0.91350028, 1. ]])
>>> np.corrcoef([1,2,3,4],[1,2,3,4]) # 正相关,变化反向一致
array([[1., 1.],[1., 1.]])
>>> np.corrcoef([1,2,3,4],[1,2,3,40]) # 正相关,变化趋势接近
array([[1. , 0.8010362],[0.8010362, 1. ]])
计算方差、协方差、标准差
>>> np.cov([1,1,1,1,1]) # 方差
array(0.)
>>> np.std([1,1,1,1,1]) # 标准差
0.0
>>> x=[-2.1,-1,4.3]
>>> y=[3,1.1,0.12]
>>> X=np.vstack((x,y))
>>> X
array([[-2.1 , -1. , 4.3 ],[ 3. , 1.1 , 0.12]])
>>> np.cov(X) # 协方差
array([[11.71 , -4.286 ],[-4.286 , 2.14413333]])
>>> np.cov(x,y)
array([[11.71 , -4.286 ],[-4.286 , 2.14413333]])
>>> np.std(X) # 标准差
2.2071223094538484
>>> np.std(X,axis=1)
array([2.79404128, 1.19558447])
>>> np.cov(x) # 方差
array(11.71)
计算特征值与特征向量
>>> A=np.array([[1,-3,3],[3,-5,3],[6,-6,4]])
>>> e,v=np.linalg.eig(A) # 特征值与特征向量
>>> e
array([ 4.+0.00000000e+00j, -2.+1.10465796e-15j, -2.-1.10465796e-15j])
>>> v
array([[-0.40824829+0.j , 0.24400118-0.40702229j,0.24400118+0.40702229j],[-0.40824829+0.j , -0.41621909-0.40702229j,-0.41621909+0.40702229j],[-0.81649658+0.j , -0.66022027+0.j ,-0.66022027-0.j ]])
>>> np.dot(A,v) # 矩阵与特征向量的乘积
array([[-1.63299316+0.00000000e+00j, -0.48800237+8.14044580e-01j,-0.48800237-8.14044580e-01j],[-1.63299316+0.00000000e+00j, 0.83243817+8.14044580e-01j,0.83243817-8.14044580e-01j],[-3.26598632+0.00000000e+00j, 1.32044054-5.55111512e-16j,1.32044054+5.55111512e-16j]])
>>> e*v # 特征值与特征向量的乘积
array([[-1.63299316+0.00000000e+00j, -0.48800237+8.14044580e-01j,-0.48800237-8.14044580e-01j],[-1.63299316+0.00000000e+00j, 0.83243817+8.14044580e-01j,0.83243817-8.14044580e-01j],[-3.26598632+0.00000000e+00j, 1.32044054-7.29317578e-16j,1.32044054+7.29317578e-16j]])
>>> np.isclose(np.dot(A,v),e*v) # 验证两者是否相等
array([[ True, True, True],[ True, True, True],[ True, True, True]])
计算逆矩阵
>>> x=np.matrix([[1,2,3],[4,5,6],[7,8,0]])
>>> y=np.linalg.inv(x) # 计算逆矩阵
>>> y
matrix([[-1.77777778, 0.88888889, -0.11111111],[ 1.55555556, -0.77777778, 0.22222222],[-0.11111111, 0.22222222, -0.11111111]])
>>> x*y # 对角线元素为1,其他元素为0或近似为0
matrix([[ 1.00000000e+00, 5.55111512e-17, 1.38777878e-17],[ 5.55111512e-17, 1.00000000e+00, 2.77555756e-17],[ 1.77635684e-15, -8.88178420e-16, 1.00000000e+00]])
>>> y*x
matrix([[ 1.00000000e+00, -1.11022302e-16, 0.00000000e+00],[ 8.32667268e-17, 1.00000000e+00, 2.22044605e-16],[ 6.93889390e-17, 0.00000000e+00, 1.00000000e+00]])
求解线性方程组
{a11x1+a12x2+...+a1nxn=b1a21x1+a22x2+...+a2nxn=b2...an1x1+an2x2+...+annxn=bn\begin{cases} a11x1+a12x2+...+a1nxn=b1\\ a21x1+a22x2+...+a2nxn=b2\\ ...\\ an1x1+an2x2+...+annxn=bn\\ \end{cases}⎩⎨⎧a11x1+a12x2+...+a1nxn=b1a21x1+a22x2+...+a2nxn=b2...an1x1+an2x2+...+annxn=bn
可以写作矩阵相乘的形式 ax=b
其中,a为nxn的矩阵,x和b为nx1的矩阵
>>> a=np.array([[3,1],[1,2]]) # 系数矩阵
>>> b=np.array([9,8]) # 系数矩阵
>>> x=np.linalg.solve(a,b) # 求解
>>> x
array([2., 3.])
>>> np.dot(a,x) # 验证
array([9., 8.])
>>> np.linalg.lstsq(a,b) # 最小二乘解,返回解、余项、a的秩、a的奇异值Warning (from warnings module):File "<pyshell#77>", line 1
FutureWarning: `rcond` parameter will change to the default of machine precision times ``max(M, N)`` where M and N are the input matrix dimensions.
To use the future default and silence this warning we advise to pass `rcond=None`, to keep using the old, explicitly pass `rcond=-1`.
(array([2., 3.]), array([], dtype=float64), 2, array([3.61803399, 1.38196601]))
>>>
有报错不要慌
>>> np.linalg.lstsq(a,b,rcond=None) # 最小二乘解,返回解、余项、a的秩、a的奇异值
(array([2., 3.]), array([], dtype=float64), 2, array([3.61803399, 1.38196601]))
可以写个方程去尝试一下,我试了一下,应该是没有问题的。
奇异值分解
把矩阵a分解为u*np.diag(s)*v的形式并返回u、s和v。其中数组s中的元素是矩阵a的元素值
>>> import numpy as np
>>> a=np.matrix([[1,2,3],[4,5,6],[7,8,9]])
>>> u,s,v=np.linalg.svd(a) # 奇异值分解
>>> u
matrix([[-0.21483724, 0.88723069, 0.40824829],[-0.52058739, 0.24964395, -0.81649658],[-0.82633754, -0.38794278, 0.40824829]])
>>> s
array([1.68481034e+01, 1.06836951e+00, 4.41842475e-16])
>>> v
matrix([[-0.47967118, -0.57236779, -0.66506441],[-0.77669099, -0.07568647, 0.62531805],[-0.40824829, 0.81649658, -0.40824829]])
>>> u*np.diag(s)*v # 验证
matrix([[1., 2., 3.],[4., 5., 6.],[7., 8., 9.]])
函数向量化
>>> mat=np.matrix([[1,2,3],[4,5,6]])
>>> mat
matrix([[1, 2, 3],[4, 5, 6]])
>>> import math
>>> vecFactorial=np.vectorize(math.factorial) # 函数向量化
>>> vecFactorial(mat)
matrix([[ 1, 2, 6],[ 24, 120, 720]])
相关文章:
)
numpy数组与矩阵运算(二)
文章目录矩阵生成与常用操作矩阵生成矩阵转置查看矩阵特性矩阵乘法计算相关系数矩阵计算方差、协方差、标准差计算特征值与特征向量计算逆矩阵求解线性方程组奇异值分解函数向量化矩阵生成与常用操作 矩阵生成 扩展库numpy中提供的matrix()函数可以用来把列表、元组、range对…...

Dubbo 中 Zookeeper 注册中心原理分析
Dubbo 中 Zookeeper 注册中心原理分析 文章目录Dubbo 中 Zookeeper 注册中心原理分析一、ZooKeeper注册中心1.1 ZooKeeper数据结构1.2 ZooKeeper的Watcher机制1.3 ZooKeeper会话机制1.4 使用ZooKeeper作为注册中心二、源码分析2.1 AbstractRegistry2.2 FailbackRegistry2.2.1 核…...
--哥德巴赫猜想的第一次实际应用)
素数产生新的算法(由筛法减法改为增加法)--哥德巴赫猜想的第一次实际应用
素数产生新的算法(由筛法减法改为增加法)--哥德巴赫猜想的第一次实际应用 摘要:长期以来,人们认为哥德巴赫猜想没有什么实际应用的。 现在,我假设这个不是猜想,而是定理或公理,就产生了新的应用…...

递归-需要满足三个条件
一,概述 递归是一种应用非常广泛的算法(或者编程技巧)。很多数据结构和算法的编码实现都要用到递归,比如 DFS 深度优先搜索、前中后序二叉树遍历等。 去的过程叫“递”,回来的过程叫“归”。基本上所有的递归问题都可…...

【剑指Offer-Java】两个栈实现队列
题目 用两个栈实现一个队列。队列的声明如下,请实现它的两个函数 appendTail 和 deleteHead ,分别完成在队列尾部插入整数和在队列头部删除整数的功能。(若队列中没有元素,deleteHead 操作返回 -1 ) 输入: [“CQueue”,“appendT…...

Allegro如何将Waived掉的DRC显示或隐藏操作指导
Allegro如何将Waived掉的DRC显示或隐藏操作指导 在用Allegro做PCB设计的时候,如果遇到正常的DRC,可以用Waive的命令将DRC不显示,如下图 当DRC被Waive掉的时候,如何将DRC再次显示出来。类似下图效果 具体操作如下 点击Display...
MATLAB——数据及其运算
MATLAB数值数据数值数据类型的分类1.整型整型数据是不带小数的数,有带符号整数和无符号整数之分。表中列出了各种整型数据的取值范围和对应的转换函数。2.浮点型浮点型数据有单精度(single)和双精度((double)之分&…...

【微信小程序】-- 页面导航 -- 声明式导航(二十二)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...

gdb查看汇编代码的例子
gdb查看汇编代码的例子 操作步骤 用 gdb 启动可执行文件:gdb executable_file在 gdb 中设置断点:break function_name 或者 break *memory_address运行程序:run当程序停止在断点处时,使用 disassemble 命令来查看汇编代码&#…...

第四讲:如何将本地代码与服务器代码保持实时同步
一、前言 在我们进行 Ambari 二次开发时,通常会先在服务器上部署一套可以使用的 Ambari 环境。 二次开发,就肯定是要改动代码的,我们不能老是在服务器上用vim编辑文件,那样效率太低,始终不是长久之计。 所以我们需要在本地打开我们的Ambari源码项目,比如用idea工具,可…...
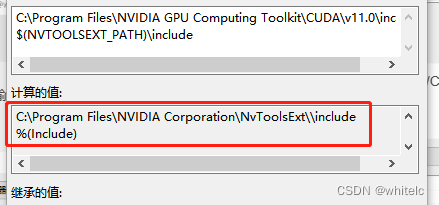
cuda调试(一)vs2019-windows-Nsight system--nvtx使用,添加nvToolsExt.h文件
cuda调试 由于在编程过程中发现不同的网格块的结构,对最后的代码结果有影响,所以想记录一下解决办法。 CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid cuda context (上下文) context类似于CPU进程上下,表示由管理层 Drive …...

向Spring容器中注入bean有哪几种方式?
文章前言: 写这篇文章的时候,我正在手机上看腾讯课堂的公开课,有讲到 Spring IOC 创建bean有哪几种方式,视频中有提到过 set注入、构造器注入、注解方式注入等等;于是,就想到了写一篇《Spring注入bean有几种…...

如何用 Python采集 <豆某yin片>并作词云图分析 ?
嗨害大家好鸭!我是小熊猫~ 总有那么一句银幕台词能打动人心 总有那么一幕名导名作念念不忘 不知道大家有多久没有放松一下了呢? 本次就来给大家采集一下某瓣电影并做词云分析 康康哪一部才是大家心中的经典呢? 最近又有哪一部可能会成为…...

Python装饰器的具体实用示例
示例1:普通装饰器 def name(n):def func(x):res n(xx)return resreturn funcname def run(x): # run name(run)print(x)if __name__ __main__:run(1) # 2def name(n):def func(*x):res n(xx)return resreturn funcname def run(x): # run name(run)pr…...

谈谈我对Retrofit源码的理解
文章目录一、Retrofit简介二、使用介绍2.1 app / build.gradle添加依赖2.2 创建 Retrofit 实例2.3 创建 API 接口定义文件2.4 使用 Retrofit 进行网络请求三、源码分析3.1 创建 Retrofit 实例: 建造者模式创建Retrofit3.2 实例化API接口: 动态代理模式3.3 获取Observable返回值…...
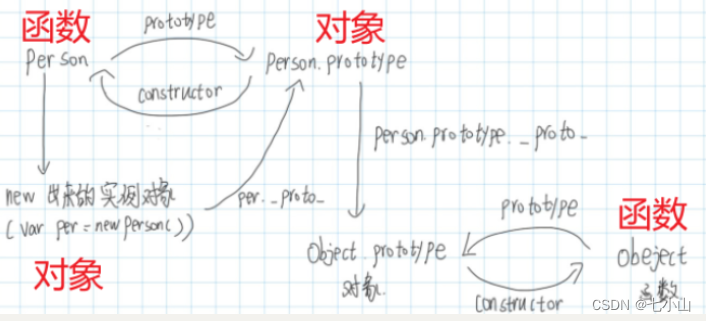
八股文(三)
目录 一、 如何理解原型与原型链 二、 js继承 三、 vuex的使用 1.mutation和action的区别 mutation action 2.Vuex都有哪些API 四、 前端性能优化方法 五、 类型判断 题目 (1)typeof判断哪个类型会出错(即结果不准确)&…...

2023最新实施工程师面试题
1、两电脑都在同一个网络环境中,A 电脑访问不到 B 电脑的共享文件。此现象可能是哪些 方面所导致?怎样处理? 答:首先你要确定是不是在一个工作组内,只有在一个工作组内才可以共享文件,然后看一个看一看有没有防火墙之类的,然后确定文件是不是已经共享 2、 电脑开机时风扇…...
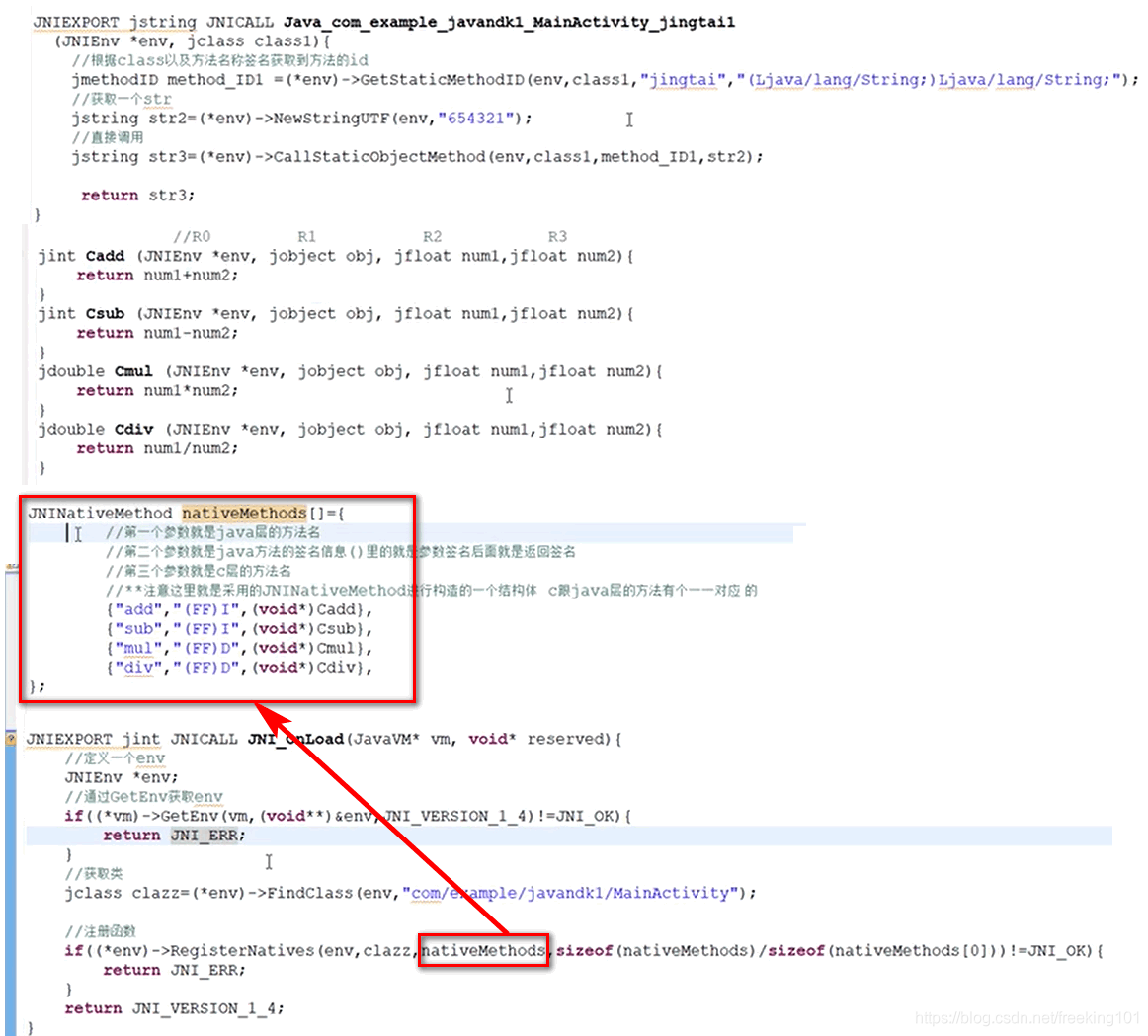
安卓逆向_6 --- JNI 和 NDK
Java 本机接口规范内容:https://docs.oracle.com/en/java/javase/19/docs/specs/jni/index.html JNI官方中文资料:https://blog.csdn.net/yishifu/article/details/52180448 NDK 官方文档:https://developer.android.google.cn/training/ar…...
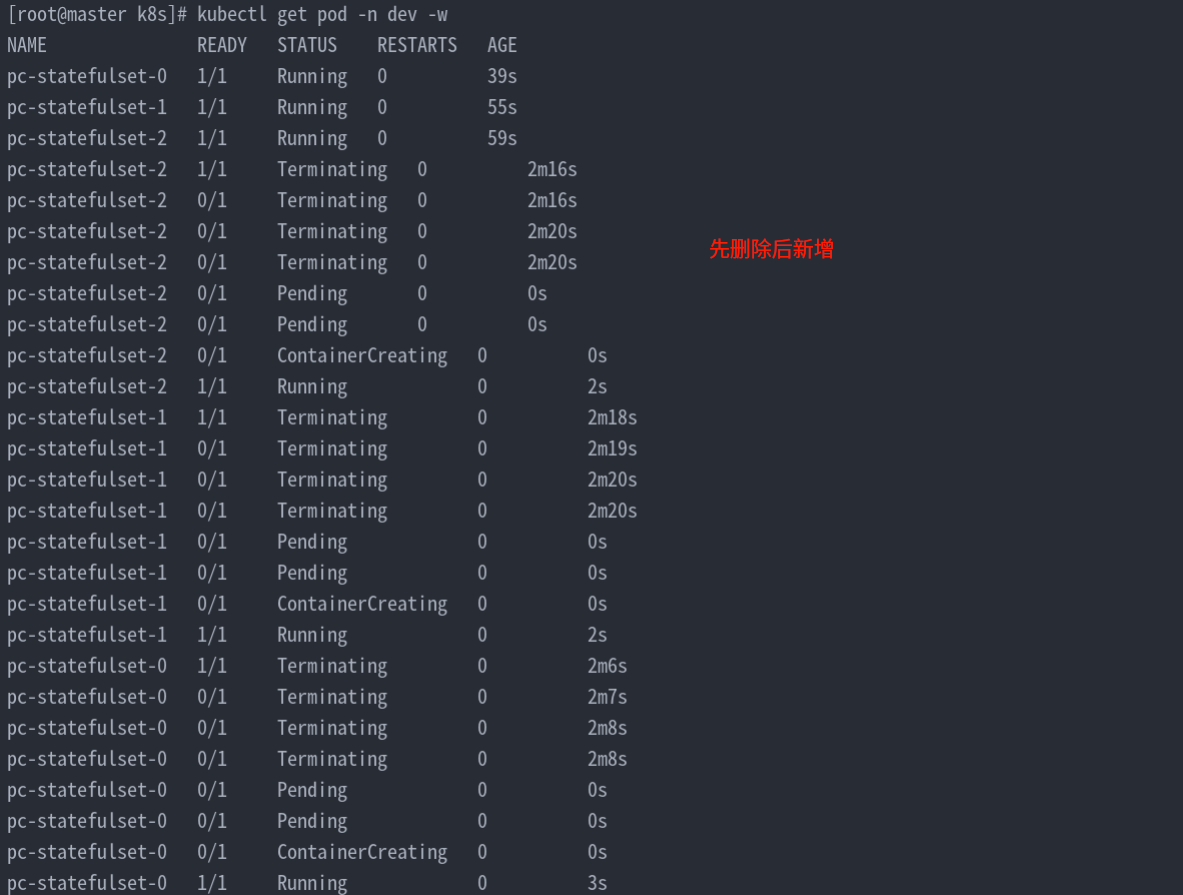
Pod控制器
K8S之控制器详解#简介#在kubernetes中,按照Pod的创建方式可以将其分为两类:自主式:kubernetes直接创建出来的Pod,这种Pod删除后就没有了,也不会重建。控制器创建pod:通过Pod控制器创建的Pod,这种Pod删除之后还会自动重…...
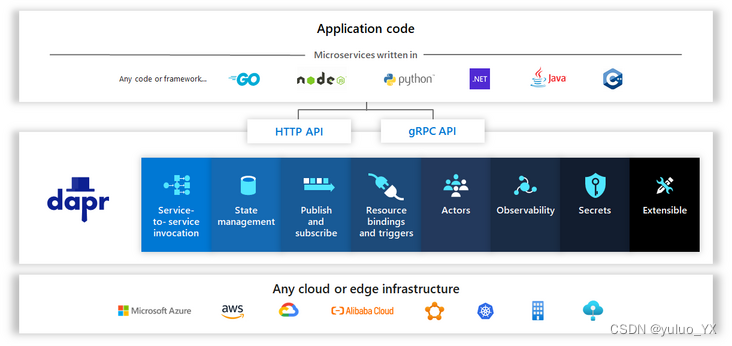
微服务到云原生
微服务到云原生 微服务 微服务架构(Microservice Architecture)是一种架构概念,旨在通过将功能分解到各个离散的服务中以实现对解决方案的解耦。 微服务是一种架构风格,一个大型复杂软件应用由一个或多个微服务组成。系统中的各…...

Codesys ST语言PID调参避坑指南:从仿真到实战,手把手教你搞定温控/电机项目
Codesys ST语言PID调参避坑指南:从仿真到实战的工程化解决方案 在工业自动化领域,PID控制算法占据着核心地位。无论是恒温控制、电机调速还是压力调节,一个精心调校的PID控制器往往能决定整个系统的性能表现。然而,许多工程师在掌…...

从零到一:在个人PC上部署并集成ChatGLM-6B到Unity应用
1. 环境准备与模型下载 在个人PC上部署ChatGLM-6B需要先搞定三件事:硬件检查、软件环境搭建和模型文件获取。我的老款游戏本(i7-9750H RTX2060 6GB显存)实测可以流畅运行,关键在于正确的量化配置。 硬件检查要点: 显存…...

GARbro:跨平台视觉小说游戏资源解析与提取工具
GARbro:跨平台视觉小说游戏资源解析与提取工具 【免费下载链接】GARbro Visual Novels resource browser 项目地址: https://gitcode.com/gh_mirrors/ga/GARbro GARbro是一款专门用于解析和提取视觉小说游戏资源文件的跨平台开源工具,支持数百种游…...

终极指南:如何使用Autoclick实现Mac自动点击900次/秒
终极指南:如何使用Autoclick实现Mac自动点击900次/秒 【免费下载链接】Autoclick A simple Mac app that simulates mouse clicks 项目地址: https://gitcode.com/gh_mirrors/au/Autoclick 你是否厌倦了重复性的鼠标点击工作?无论是游戏中的重复操…...

如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南
如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Tre…...

地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书
地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书 副标题:全要素三维动态重建井下场景,融合井下无感坐标解算、跨断面跨镜轨迹串联、身体指纹人员轨迹存档,井下风险前置感知、动态全程透明追溯 前言 矿山井下深部硐室与纵…...

GURU-Ai:面向开发者的AI命令行工具集,提升代码理解与运维效率
1. 项目概述:一个面向开发者的AI助手工具集最近在GitHub上看到一个挺有意思的项目,叫“Guru322/GURU-Ai”。光看名字,你可能会觉得这又是一个大而全的AI模型或者聊天机器人,但点进去仔细研究后,我发现它的定位其实非常…...

如何免费高效优化电脑性能:UXTU终极调优指南
如何免费高效优化电脑性能:UXTU终极调优指南 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility Universal x86 Tuning…...

Godot游戏自动化构建与发布:基于GitHub Actions与Docker的CI/CD实践
1. 项目概述:当Godot遇上CI/CD如果你是一名独立游戏开发者,或者在一个小团队里负责Godot引擎的项目,那么“构建”和“部署”这两个词,大概率是你开发流程里最头疼的环节之一。手动导出项目到不同平台(Windows、Linux、…...
)
用51单片机和HC-SR04超声波模块DIY一个倒车雷达(附完整代码和立创EDA原理图)
51单片机与HC-SR04超声波模块实战:打造高精度倒车雷达系统 在汽车电子和智能硬件领域,倒车雷达作为基础安全装置,其DIY实现不仅能帮助理解超声波测距原理,更是掌握嵌入式系统开发的绝佳实践。本文将手把手教你使用经典的STC89C52单…...