儿童悬吊训练系统:改善脑性麻痹儿童平衡感与运动能力的有效途径
脑性麻痹(CP)是一种运动障碍,常常由于早期的运动皮层损伤而引起。这种损伤可能导致姿势、操纵技能和行走能力的差异。平衡控制不良是 CP 患儿面临的一项主要挑战,它可能导致动作控制异常以及步态问题,从而影响日常活动和生活质量。
在面对这些挑战时,儿童悬吊训练系统被认为是一种有益的康复方法。通过悬挂在系统中,儿童可以在相对安全的环境下进行平衡训练。悬吊系统提供了适当的支撑和稳定性,使得儿童可以在稳定的基础上练习平衡控制技能。这样的训练有助于改善姿势控制、身体平衡以及空间感知能力,从而增强儿童的平衡感。
通过逐渐调整悬挂系统的高度和支撑点,可以逐步增加训练的难度,为儿童提供更大的挑战。这种个性化的训练方法可以促进儿童的平衡能力进一步发展,从而提高其日常生活中的运动能力和自主性。因此,悬挂训练系统被视为提升脑性麻痹儿童平衡感的有效工具之一。
此外,儿童悬吊训练系统还可以与其他康复设备和工具结合使用,如平衡板、球体和阻力带,以提供更多的训练选择和变化。这种综合性的训练方法可以有效地激发儿童的兴趣,促进他们参与到康复过程中来。
除了提高平衡感外,儿童悬吊训练系统还可以帮助脑性麻痹儿童发展其他方面的运动能力,如肌力、肌耐力和协调性。
文章来源:www.sjzjanlen.com
相关文章:

儿童悬吊训练系统:改善脑性麻痹儿童平衡感与运动能力的有效途径
脑性麻痹(CP)是一种运动障碍,常常由于早期的运动皮层损伤而引起。这种损伤可能导致姿势、操纵技能和行走能力的差异。平衡控制不良是 CP 患儿面临的一项主要挑战,它可能导致动作控制异常以及步态问题,从而影响日常活动…...
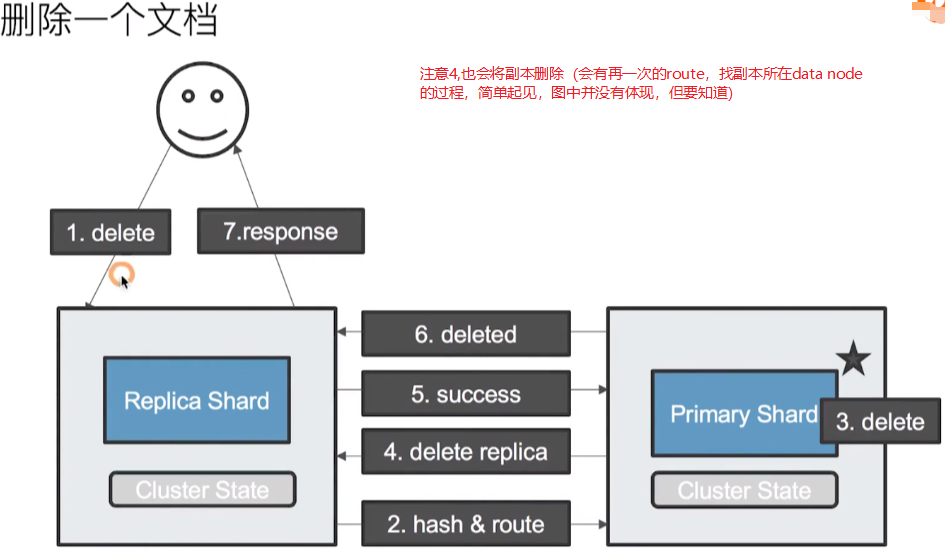
ElasticSearch之文档的存储
写在前面 本文看下文档的存储相关内容。 1:如何确定文档存储在哪个分片? 我们需要确保文档均匀分布在所有的分片中,避免某些部分机器空闲,部分机器繁忙的情况出现,想要实现均匀分布我们可以考虑如下的几种分片路由算…...

在Redhat 7 Linux上安装llama.cpp [ 错误stdatomic.h: No such file or directory]
前期准备 在github上下载llama.cpp或克隆。 GitHub - ggerganov/llama.cpp: LLM inference in C/C git clone https://github.com/ggerganov/llama.cpp.gitcd llama.cpp 执行make命令编译llama.cpp make 在huggingface里下载量化了的 gguf格式的llama2模型。 https:/…...
linux 常用 命令行HTTP客户端
在Linux环境中,命令行HTTP客户端是一种用于发送HTTP请求的工具,它们通常用于测试网站、服务器或API的响应。这些客户端支持各种HTTP方法,如GET、POST、PUT、DELETE等,并允许用户设置请求头、发送数据等。以下是一些常用的命令行HT…...

深入理解@Param注解:用于参数映射的利器
摘要:Param注解在Java开发中被广泛应用,它可以优雅地解决方法参数与SQL语句中占位符的映射问题,提高代码的可读性和可维护性。本文将深入探讨Param注解的背景、使用方法、解决的问题、映射原理,并对使用与不使用Param注解的情况进…...

OCP Secure boot必要特性
三点必需要求: The platform components must: 1. Provide a mechanism for securely anchoring a root of trust public key. // 提供一种用于安全地锚定信任根公钥的机制。 2. Verify the device firmware digital signature using the anchored public key /…...

全新攻击面管理平台
首页大屏 内测阶段,免费试用一个月 有兴趣体验的师傅,来长亭云图极速版群里找我 py...

在VMware中安装CentOS 7并配置Docker
VMware安装CentOS 7 一、介绍 该文章介绍如何使用启动U盘在虚拟机里面安装系统,虚拟机版本为VMware Workstation 16 pro,Linux版本为CentOS Linux release 7.9.2009 (Core)。 二、安装 1、创建虚拟机 点击创建新的虚拟机 选择典型就可以了…...
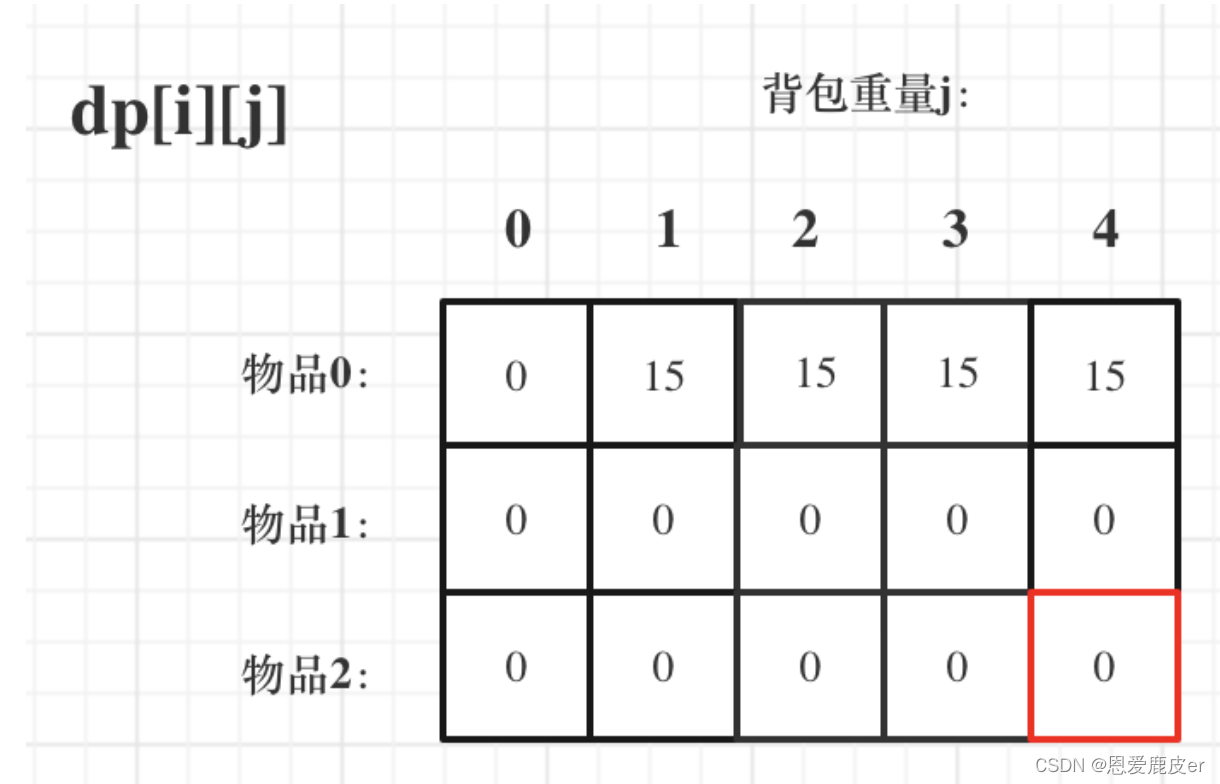
Leetcoder Day37| 动态规划part04 背包问题
01背包理论基础 面试掌握01背包,完全背包和重背包就够用了。 背包问题的理论基础重中之重是01背包,一定要理解透! 01 背包 有n件物品和一个最多能背重量为w 的背包。第i件物品的重量是weight[i],得到的价值是value[i] 。每件物品…...
)
突破编程_C++_面试(STL 编程 vector )
面试题 1 :std::vector 的底层存储机制是什么? std::vector 的底层存储机制是一个动态数组,它内部通过一片连续的内存空间来存储元素。当这个连续的内存空间不足以容纳新元素时,std::vector 会自动申请一块更大的内存空间&#x…...

【报名指南】2024年第九届数维杯数学建模挑战赛报名全流程图解
1.官方报名链接: 2024年第九届数维杯大学生数学建模挑战赛http://www.nmmcm.org.cn/match_detail/32 2.报名流程(电脑与手机报名操作流程一致) 参赛对象为在校专科生、本科生、研究生,每组参赛人数为1-3人(指导老师不…...
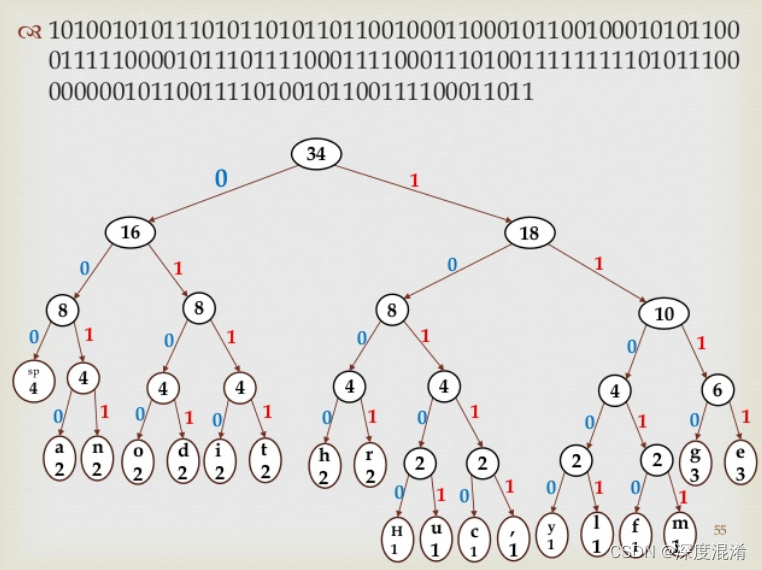
C#,哈夫曼编码(Huffman Code)压缩(Compress )与解压缩(Decompress)算法与源代码
David A. Huffman 1 哈夫曼编码简史(Huffman code) 1951年,哈夫曼和他在MIT信息论的同学需要选择是完成学期报告还是期末考试。导师Robert M. Fano给他们的学期报告的题目是,寻找最有效的二进制编码。由于无法证明哪个已有编码是…...
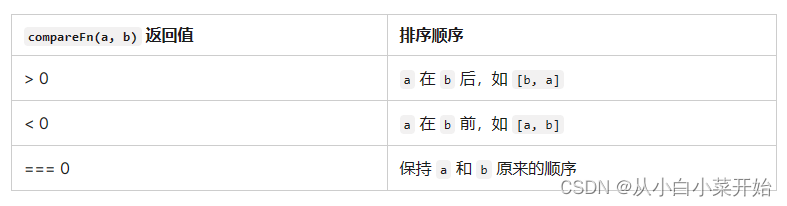
JS 对象数组排序方法测试
输出 一.Array.prototype.sort() 1.默认排序 sort() sort() 方法就地对数组的元素进行排序,并返回对相同数组的引用。默认排序是将元素转换为字符串,然后按照它们的 UTF-16 码元值升序排序。 由于它取决于具体实现,因此无法保证排序的时…...

【计算机考研】408学到什么程度才能考130?
408考130要比考研数学考130难的多 我想大部分考过408的考生都是这么认为的。408的难点在于他涉及的范围太广了,首先如果你要备考408,你要准备四门课程,分别是数据结构,计算机组成原理,操作系统和计算机网络。 这四门…...

“智农”-农业物联网可视化
大棚可视化|设施农业可视化|农业元宇宙|农业数字孪生|大棚物联网|大棚数字孪生|农业一体化管控平台|智慧农业可视化|智农|农业物联网可视化|农业物联网数字孪生|智慧农业|大棚三维可视化|智慧大棚可视化|智慧大棚|农业智慧园区|数字农业|数字大棚|农业大脑|智慧牧业数字孪生|智…...

day03-网络编程
1>TCP机械臂测试 #include<myhead.h> #define SER_IP "10.211.55.11" #define SER_PORT 8888 #define CLI_IP "10.211.55.9" #define CLI_PORT 6666 //客户端 int main(int argc, const char *argv[]) {//1、创建用于通信的套接字文件描述符int …...

Java反射,动态代理。笔记
1.pathClass Loader 和 Dex ClassLoader 在Android 5.0以下的版本中,两者之间的区别为: DexClassLoader:可加载jar、apk和dex」可以从SD卡中加载PathClassLoader:只能加载已安裝到系統中(即/data/app目录下)的apk文件但是随着Android版本的升级,到Android …...

作为团队开发组长你需要做的:
当你需要开始团队开发时,以下是一些你可能需要知道和使用的工具、实践和原则: 1. 版本控制系统 (VCS): 使用版本控制系统(如Git)来管理代码。这能确保团队成员协同工作时能够跟踪和管理代码的变更。创建分支进行开发,…...
)
Windows安装Neo4j数据库教程(3.X版本)
安装java的jdk(jdk1.8仅支持Neo4j 3.X版本)去 Index of /doc/neo4j/ 下载目标版本的Windows zip安装包将安装包解压到任意目录,并记住解压后带版本号的文件夹路径添加系统环境变量,变量名:NEO4J_HOME,变量值…...

无人机飞行控制系统技术,四旋翼无人机控制系统建模技术详解
物理建模是四旋翼无人机控制系统建模的基础,主要涉及到无人机的物理特性和运动学特性。物理建模的目的是将无人机的运动与输入信号(如控制电压)之间的关系进行数学描述。 四旋翼无人直升机是具有四个输入力和六个坐标输出的欠驱动动力学旋翼…...

用Delphi 7打造动物农场小游戏:一场编程与数据结构的趣味之旅
文章来自:用Delphi 7打造动物农场小游戏:一场编程与数据结构的趣味之旅 当经典的Pascal语言遇上可爱的动物农场,会擦出怎样的火花? 前言 还记得第一次接触编程时的兴奋吗?当你敲下第一行代码,看到"He…...
 心智模型导览——《Designing Data-Intensive Applications》书介绍导航)
《设计数据密集型应用》(DDIA, 2nd ed.) 心智模型导览——《Designing Data-Intensive Applications》书介绍导航
《设计数据密集型应用》(DDIA, 2nd ed.) 心智模型导览——《Designing Data-Intensive Applications》书介绍导航写给:还没读过这本书、想先在脑子里有张地图的读者 目的:装上 6 个内容枢纽——不只是抽象概念,每个枢纽下面挂着这本书真正讲的…...

【Android】针灸大师-穴位解剖精准经络系统-医学生必备-会员版
【Android】针灸大师-穴位解剖精准经络系统-医学生必备-会员版 链接:https://pan.xunlei.com/s/VOtJd241jF6B-cTY3Gs64aacA1?pwdeynm# 针灸大师(Acupuncture master)将经络穴位与人体精细解剖相结合,是交互式学习十二经脉,奇经八脉,经络系统…...

工厂MES数据自动采集怎样用AI完成?资深架构师的非侵入式集成落地指南
摘要: 我是架构师老王。在2026年工业数字化转型的深水区,工厂MES数据自动采集已不再是简单的“连线接口”,而是演变为一场关于“感知、决策与执行”的架构革命。面对老旧系统API缺失、烟囱式架构林立以及信创环境下严苛的安全合规要求&#x…...

LivePortrait技术突破:企业级肖像动画生成与部署实战指南
LivePortrait技术突破:企业级肖像动画生成与部署实战指南 【免费下载链接】LivePortrait Bring portraits to life! 项目地址: https://gitcode.com/GitHub_Trending/li/LivePortrait 从静态到动态:如何用AI技术让肖像"活"起来 在数字…...

终极指南:5分钟搭建Rust高性能HTTP文件服务器,告别繁琐配置
终极指南:5分钟搭建Rust高性能HTTP文件服务器,告别繁琐配置 【免费下载链接】simple-http-server Simple http server in Rust (Windows/Mac/Linux) 项目地址: https://gitcode.com/gh_mirrors/si/simple-http-server Simple HTTP Server是一款基…...

终极指南:如何用amdgpu_top实时监控AMD显卡性能
终极指南:如何用amdgpu_top实时监控AMD显卡性能 【免费下载链接】amdgpu_top Tool to display AMDGPU usage 项目地址: https://gitcode.com/gh_mirrors/am/amdgpu_top 还在为AMD显卡性能监控而烦恼吗?想要像NVIDIA用户使用nvidia-smi那样轻松掌握…...

如何用Shutter Encoder解决专业视频工作流中的格式兼容性问题:5步完整指南
如何用Shutter Encoder解决专业视频工作流中的格式兼容性问题:5步完整指南 【免费下载链接】shutter-encoder A professional video compression tool accessible to all, mostly based on FFmpeg. 项目地址: https://gitcode.com/gh_mirrors/sh/shutter-encoder …...

UVa 275 Expanding Fractions
题目分析 本题要求计算两个正整数的除法的小数展开形式,其中分子小于分母,分母小于 100010001000。输入以 0 0 结束。 对于每个分数,需要输出其小数部分(从小数点开始),并且: 如果小数是有限的&…...

为内部知识库问答系统集成稳定的多模型推理能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部知识库问答系统集成稳定的多模型推理能力 在企业内部,知识库是宝贵的资产,但如何让员工高效地从中获…...