Android minigbm框架普法
Android minigbm框架普法
引言
假设存在这么一个场景,我的GPU的上层实现走的不是标准的Mesa接口,且GPU也没有提专门配套的gralloc和hwcompoer实现。那么我们的Android要怎么使用到EGL和GLES库呢,并且此GPU驱动是支持drm实现的,也有video overlay层。这个就是我们这个博客准备或者是探索要解决的。这里无意中发现mingbm + hwcompoer的组合可能解决,这里我就花费一定的时间来分析这个模块!
一.minigbm结构
1.1 minigbm目录结构
minigbm├── amdgpu.c├── Android.bp├── Android.gralloc.mk├── common.mk├── cros_gralloc├── dri.c├── dri.h├── drv.c├── drv.h├── drv_priv.h├── evdi.c├── exynos.c├── gbm.c├── gbm.h├── gbm_helpers.c├── gbm_helpers.h├── gbm.pc├── gbm_priv.h├── helpers_array.c├── helpers_array.h├── helpers.c├── helpers.h├── i915.c├── LICENSE├── Makefile├── marvell.c├── mediatek.c├── meson.c├── METADATA├── MODULE_LICENSE_BSD├── msm.c├── nouveau.c├── OWNERS├── OWNERS.android├── PRESUBMIT.cfg├── presubmit.sh├── radeon.c├── rockchip.c├── synaptics.c├── tegra.c├── udl.c├── util.h├── vc4.c├── vgem.c├── virgl_hw.h├── virtgpu_drm.h└── virtio_gpu.c1 directory, 46 files
1.2 minigbm框架结构
Minigbm的整个组织结构,可以用下面的框图来表示!
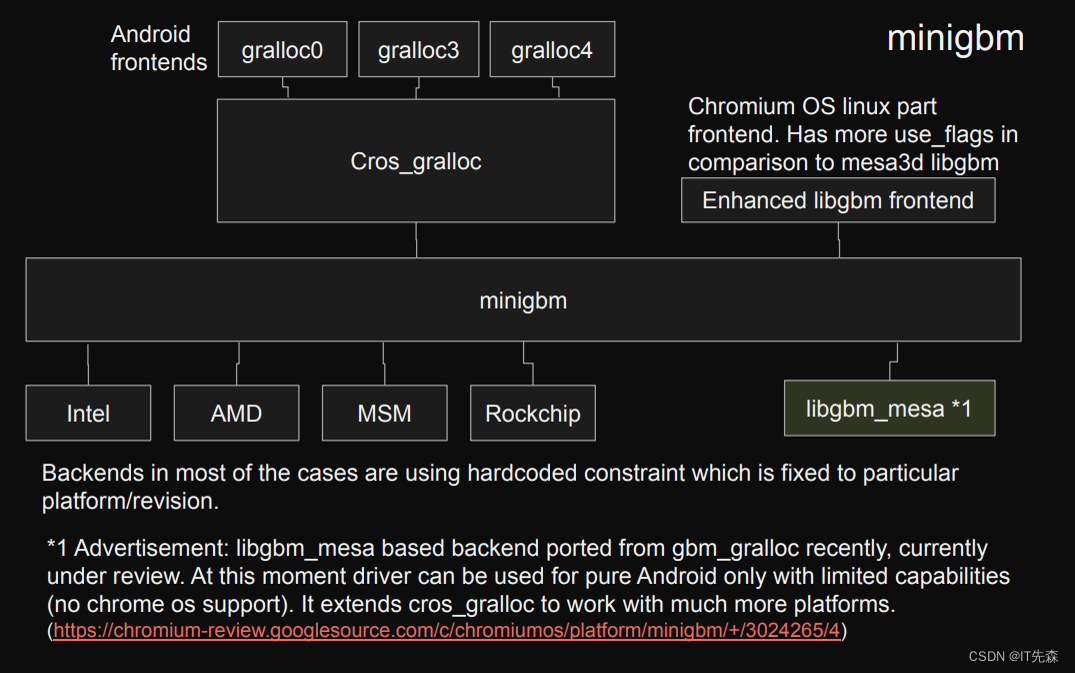
Generic Android Buffer Allocator - Linaro
二. minigbm源码分析
minig的核心主要是提供gralloc的HAL实现,但是我看它也提供了私有的HIDL service实现,关于HIDL的实现这个暂时不在我们考虑的范围之内。我们重点分析minigbm作为gralloc hal的实现的代码!
注意我这里分析的minigbm的版本如下:
commit aa65a6a67cd41390d4e8a0f87e20d3191db2994d (HEAD, tag: android-11.0.0_r46, tag: android-11.0.0_r43, tag: android-11.0.0_r40, tag: android-11.0.0_r39, tag: android-11.0.0_r38, tag: android-11.0.0_r37, tag: android-11.0.0_r36, tag: android-11.0.0_r35, tag: android-11.0.0_r34, tag: android-11.0.0_r33, tag: android-11.0.0_r32, tag: android-11.0.0_r30, tag: m/android-11.0.0_r37, aosp/android11-qpr3-s1-release, aosp/android11-qpr3-release, aosp/android11-qpr2-release, aosp/android11-qpr1-c-release)
Author: Jason Macnak <natsu@google.com>
Date: Sat Jul 25 06:02:22 2020 -0700cros_gralloc: map custom drm fourcc back to standard fourccMinigbm uses a custom fourcc DRM_FORMAT_YVU420_ANDROID tospecify a DRM_FORMAT_YVU420 format with the extra Androidspecific alignment requirement. Mapper should map thiscustom code back into the standard one for metadata get().Bug: b/146515640Test: launch_cvd, open youtube video, observe no hwc warningChange-Id: Id9ac2bb233837b6c7aa093eddbea81da0bdf3c1b2.1 minigbm注册gralloc hal
肯定mingbm作为gralloc的hal的实现,我们肯定得重点分析了。地球人都知道HAL的实现的入口HAL_MODULE_INFO_SYM,我们来看看minigbm是怎么实现的:
//cros_gralloc/gralloc0/gralloc0.cc
struct gralloc0_module {gralloc_module_t base;std::unique_ptr<alloc_device_t> alloc;std::unique_ptr<cros_gralloc_driver> driver;bool initialized;std::mutex initialization_mutex;
};// clang-format off
static struct hw_module_methods_t gralloc0_module_methods = { .open = gralloc0_open };
// clang-format onstruct gralloc0_module HAL_MODULE_INFO_SYM = {.base ={.common ={.tag = HARDWARE_MODULE_TAG,.module_api_version = GRALLOC_MODULE_API_VERSION_0_3,.hal_api_version = 0,.id = GRALLOC_HARDWARE_MODULE_ID,.name = "CrOS Gralloc",.author = "Chrome OS",.methods = &gralloc0_module_methods,},/*** @brief * 当其他进程分配的GraphicBuffer传递到当前进程后,需要通过该方法映射到当前进程,* 为后续的lock做好准备*/.registerBuffer = gralloc0_register_buffer,/*** @brief * 取消GraphicBuffer在当前进程的映射,后续不能调用lock了*/.unregisterBuffer = gralloc0_unregister_buffer,/*** @brief * 调用lock后,才能访问图形buffer,假如usage指定了GRALLOC_USAGE_SW_* flag,* vaddr将被填充成图形Buffer在虚拟内存中的地址*/.lock = gralloc0_lock,.unlock = gralloc0_unlock,.perform = gralloc0_perform,.lock_ycbcr = gralloc0_lock_ycbcr,.lockAsync = gralloc0_lock_async,.unlockAsync = gralloc0_unlock_async,.lockAsync_ycbcr = gralloc0_lock_async_ycbcr,.validateBufferSize = NULL,.getTransportSize = NULL,},/*** @brief * 是不是这个地方感觉有点奇怪,咋alloc的实现为null* 好戏在后头*/.alloc = nullptr,.driver = nullptr,.initialized = false,
};2.2 minigbm下HAL hw_module open函数实现
没有啥文字可以描述的,我们直接上源码!
static int gralloc0_open(const struct hw_module_t *mod, const char *name, struct hw_device_t **dev)
{auto const_module = reinterpret_cast<const struct gralloc0_module *>(mod);auto module = const_cast<struct gralloc0_module *>(const_module);if (module->initialized) {*dev = &module->alloc->common;return 0;}/*** @brief Construct a new if object* libhardware/include/hardware/gralloc.h* #define GRALLOC_HARDWARE_GPU0 "gpu0"*/if (strcmp(name, GRALLOC_HARDWARE_GPU0)) {drv_log("Incorrect device name - %s.\n", name);return -EINVAL;}if (gralloc0_init(module, true))return -ENODEV;*dev = &module->alloc->common;return 0;
}
我们接着看下核心的函数gralloc0_init的实现,不能停,一口气炫下去:
//cros_gralloc/cros_gralloc_driver.h
class cros_gralloc_driver
{public:cros_gralloc_driver();~cros_gralloc_driver();int32_t init();bool is_supported(const struct cros_gralloc_buffer_descriptor *descriptor);int32_t allocate(const struct cros_gralloc_buffer_descriptor *descriptor,buffer_handle_t *out_handle);int32_t retain(buffer_handle_t handle);int32_t release(buffer_handle_t handle);int32_t lock(buffer_handle_t handle, int32_t acquire_fence, bool close_acquire_fence,const struct rectangle *rect, uint32_t map_flags,uint8_t *addr[DRV_MAX_PLANES]);int32_t unlock(buffer_handle_t handle, int32_t *release_fence);int32_t invalidate(buffer_handle_t handle);int32_t flush(buffer_handle_t handle, int32_t *release_fence);int32_t get_backing_store(buffer_handle_t handle, uint64_t *out_store);int32_t resource_info(buffer_handle_t handle, uint32_t strides[DRV_MAX_PLANES],uint32_t offsets[DRV_MAX_PLANES]);int32_t get_reserved_region(buffer_handle_t handle, void **reserved_region_addr,uint64_t *reserved_region_size);uint32_t get_resolved_drm_format(uint32_t drm_format, uint64_t usage);void for_each_handle(const std::function<void(cros_gralloc_handle_t)> &function);private:cros_gralloc_driver(cros_gralloc_driver const &);cros_gralloc_driver operator=(cros_gralloc_driver const &);cros_gralloc_buffer *get_buffer(cros_gralloc_handle_t hnd);struct driver *drv_;std::mutex mutex_;std::unordered_map<uint32_t, cros_gralloc_buffer *> buffers_;std::unordered_map<cros_gralloc_handle_t, std::pair<cros_gralloc_buffer *, int32_t>>handles_;
};//cros_gralloc/gralloc0/gralloc0.cc
static int gralloc0_init(struct gralloc0_module *mod, bool initialize_alloc)
{std::lock_guard<std::mutex> lock(mod->initialization_mutex);if (mod->initialized)return 0;mod->driver = std::make_unique<cros_gralloc_driver>();/*** @brief * 根据vendor,初始化不同驱动模型,实现在cros_gralloc_driver.cc里面* 如果要扩展的话,就得实现phy自己的逻辑*/if (mod->driver->init()) {drv_log("Failed to initialize driver.\n");return -ENODEV;}if (initialize_alloc) {mod->alloc = std::make_unique<alloc_device_t>();/*** @brief * alloc在此处被赋值**/mod->alloc->alloc = gralloc0_alloc;mod->alloc->free = gralloc0_free;mod->alloc->common.tag = HARDWARE_DEVICE_TAG;mod->alloc->common.version = 0;mod->alloc->common.module = (hw_module_t *)mod;mod->alloc->common.close = gralloc0_close;}mod->initialized = true;return 0;
}
2.3 cros_gralloc_driver的init实现
我们接着看下cros_gralloc_driver的init是如何被初始的:
//cros_gralloc/cros_gralloc_driver.cc
int32_t cros_gralloc_driver::init()
{/** Create a driver from rendernode while filtering out* the specified undesired driver.** TODO(gsingh): Enable render nodes on udl/evdi.*/int fd;drmVersionPtr version;char const *str = "%s/renderD%d";const char *undesired[2] = { "vgem", nullptr };uint32_t num_nodes = 63;uint32_t min_node = 128;uint32_t max_node = (min_node + num_nodes);for (uint32_t i = 0; i < ARRAY_SIZE(undesired); i++) {for (uint32_t j = min_node; j < max_node; j++) {char *node;/*** @brief * 打开/dev/dri/renderD0-renderD128*/if (asprintf(&node, str, DRM_DIR_NAME, j) < 0)continue;fd = open(node, O_RDWR, 0);free(node);if (fd < 0)continue;version = drmGetVersion(fd);if (!version) {close(fd);continue;}if (undesired[i] && !strcmp(version->name, undesired[i])) {close(fd);drmFreeVersion(version);continue;}drmFreeVersion(version);/*** @brief * 加载不同的driver*/drv_ = drv_create(fd);if (drv_)return 0;close(fd);}}return -ENODEV;
}
我们接着玩下看drv_create的实现,这个是根绝实际驱动情况,决定backend后端:
//drv.c
struct driver *drv_create(int fd)
{struct driver *drv;int ret;drv = (struct driver *)calloc(1, sizeof(*drv));if (!drv)return NULL;drv->fd = fd;/*** @brief * 获取不同的后端,譬如i915,amdgpu,msm等* 或者阔以构建一个通用的backend,譬如xxx后端,但是是根据drm的驱动名称进行匹配的,* 所以那怕是通用的,也需要进行相关的扩展*/drv->backend = drv_get_backend(fd);if (!drv->backend)goto free_driver;if (pthread_mutex_init(&drv->driver_lock, NULL))goto free_driver;//drmHashCreate这个API不知道是用来干啥的drv->buffer_table = drmHashCreate();if (!drv->buffer_table)goto free_lock;drv->mappings = drv_array_init(sizeof(struct mapping));if (!drv->mappings)goto free_buffer_table;drv->combos = drv_array_init(sizeof(struct combination));if (!drv->combos)goto free_mappings;if (drv->backend->init) {ret = drv->backend->init(drv);if (ret) {drv_array_destroy(drv->combos);goto free_mappings;}}return drv;free_mappings:drv_array_destroy(drv->mappings);
free_buffer_table:drmHashDestroy(drv->buffer_table);
free_lock:pthread_mutex_destroy(&drv->driver_lock);
free_driver:free(drv);return NULL;
}
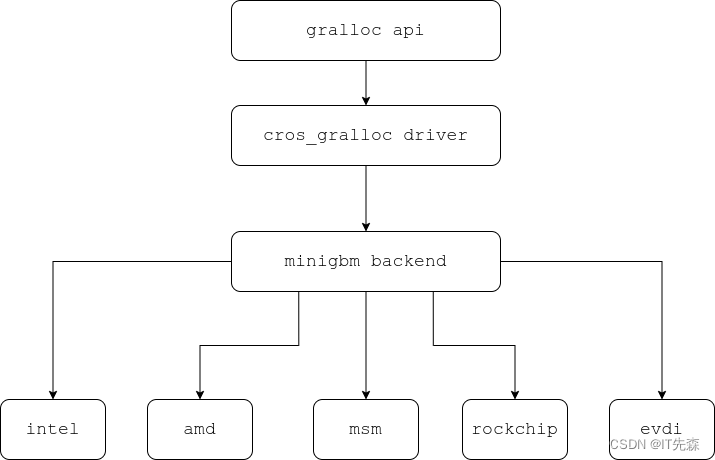
2.4 minigbm的backend以及backend的初始化
这里的backend,我把它理解它为minigbm对各种gpu抽象出来的一种能力的统称。因为前端就是gralloc hal的接口定义,都是一致的,然后后端backend抽象出来,然后根据实际的情况,调用具体的gpu用户层接口实现!我们来看backend是如何抽象和初始化的。
#ifdef DRV_AMDGPU
extern const struct backend backend_amdgpu;
#endif
/*** @brief * 可扩展虚拟显示接口(EVDI)*/
extern const struct backend backend_evdi;
#ifdef DRV_EXYNOS
extern const struct backend backend_exynos;
#endif
#ifdef DRV_I915
extern const struct backend backend_i915;
#endif
#ifdef DRV_MARVELL
extern const struct backend backend_marvell;
#endif
#ifdef DRV_MEDIATEK
extern const struct backend backend_mediatek;
#endif
#ifdef DRV_MESON
extern const struct backend backend_meson;
#endif
#ifdef DRV_MSM
extern const struct backend backend_msm;
#endif
extern const struct backend backend_nouveau;
#ifdef DRV_RADEON
extern const struct backend backend_radeon;
#endif
#ifdef DRV_ROCKCHIP
extern const struct backend backend_rockchip;
#endif
#ifdef DRV_SYNAPTICS
extern const struct backend backend_synaptics;
#endif
#ifdef DRV_TEGRA
extern const struct backend backend_tegra;
#endif
extern const struct backend backend_udl;
#ifdef DRV_VC4
extern const struct backend backend_vc4;
#endif
extern const struct backend backend_vgem;
extern const struct backend backend_virtio_gpu;static const struct backend *drv_get_backend(int fd)
{drmVersionPtr drm_version;unsigned int i;drm_version = drmGetVersion(fd);if (!drm_version)return NULL;/*** @brief * 后面如果要扩展,则是在backend_list中* 添加backend_phy*/const struct backend *backend_list[] = {
#ifdef DRV_AMDGPU&backend_amdgpu,
#endif&backend_evdi,
#ifdef DRV_EXYNOS&backend_exynos,
#endif
#ifdef DRV_I915&backend_i915,
#endif
#ifdef DRV_MARVELL&backend_marvell,
#endif
#ifdef DRV_MEDIATEK&backend_mediatek,
#endif
#ifdef DRV_MESON&backend_meson,
#endif
#ifdef DRV_MSM&backend_msm,
#endif&backend_nouveau,
#ifdef DRV_RADEON&backend_radeon,
#endif
#ifdef DRV_ROCKCHIP&backend_rockchip,
#endif
#ifdef DRV_SYNAPTICS&backend_synaptics,
#endif
#ifdef DRV_TEGRA&backend_tegra,
#endif&backend_udl,
#ifdef DRV_VC4&backend_vc4,
#endif&backend_vgem, &backend_virtio_gpu,};for (i = 0; i < ARRAY_SIZE(backend_list); i++) {const struct backend *b = backend_list[i];// Exactly one of the main create functions must be defined.assert((b->bo_create != NULL) ^ (b->bo_create_from_metadata != NULL));// Either both or neither must be implemented.assert((b->bo_compute_metadata != NULL) == (b->bo_create_from_metadata != NULL));// Both can't be defined, but it's okay for neither to be (i.e. only bo_create).assert((b->bo_create_with_modifiers == NULL) ||(b->bo_create_from_metadata == NULL));if (!strcmp(drm_version->name, b->name)) {drmFreeVersion(drm_version);return b;}}drmFreeVersion(drm_version);return NULL;
}
这里我们可以看到这里抽象出来了几种典型的GPU的backend,然后再根据前面获取到的drm的驱动名称进行匹配,匹配到了则返回合适的backend,没有则返回NULL。这里我们以evdi为例子来进行相关的分析。我么来看evdi backend的init。
//helpers.c
int drv_modify_linear_combinations(struct driver *drv)
{/** All current drivers can scanout linear XRGB8888/ARGB8888 as a primary* plane and as a cursor.*/drv_modify_combination(drv, DRM_FORMAT_XRGB8888, &LINEAR_METADATA,BO_USE_CURSOR | BO_USE_SCANOUT);drv_modify_combination(drv, DRM_FORMAT_ARGB8888, &LINEAR_METADATA,BO_USE_CURSOR | BO_USE_SCANOUT);return 0;
}static const uint32_t render_target_formats[] = { DRM_FORMAT_ARGB8888, DRM_FORMAT_XRGB8888 };static int evdi_init(struct driver *drv)
{/*** @brief Construct a new drv add combinations object* add default render_target_formats*/drv_add_combinations(drv, render_target_formats, ARRAY_SIZE(render_target_formats),&LINEAR_METADATA, BO_USE_RENDER_MASK);return drv_modify_linear_combinations(drv);
}const struct backend backend_evdi = {.name = "evdi",.init = evdi_init,.bo_create = drv_dumb_bo_create,.bo_destroy = drv_dumb_bo_destroy,.bo_import = drv_prime_bo_import,.bo_map = drv_dumb_bo_map,.bo_unmap = drv_bo_munmap,
};
到这里gralloc hal也注册OK了,cross_gralloc_driver和backend也构建初始化OK了,后面就是上层通过grallc api来进行相关调用了。我们接着继续往下看。
2.5 minigbm的graloc hal下alloc的实现
Android通过alloc开构建GraphicBuffer,我们来看看minigbm是如何实现的。
static int gralloc0_alloc(alloc_device_t *dev, int w, int h, int format, int usage,buffer_handle_t *handle, int *stride)
{int32_t ret;bool supported;struct cros_gralloc_buffer_descriptor descriptor;auto mod = (struct gralloc0_module const *)dev->common.module;descriptor.width = w;descriptor.height = h;descriptor.droid_format = format;descriptor.droid_usage = usage;descriptor.drm_format = cros_gralloc_convert_format(format);descriptor.use_flags = gralloc0_convert_usage(usage);descriptor.reserved_region_size = 0;/*** @brief * judge driver is support descriptor or not*/supported = mod->driver->is_supported(&descriptor);if (!supported && (usage & GRALLOC_USAGE_HW_COMPOSER)) {descriptor.use_flags &= ~BO_USE_SCANOUT;supported = mod->driver->is_supported(&descriptor);}if (!supported && (usage & GRALLOC_USAGE_HW_VIDEO_ENCODER) &&!gralloc0_droid_yuv_format(format)) {// Unmask BO_USE_HW_VIDEO_ENCODER in the case of non-yuv formats// because they are not input to a hw encoder but used as an// intermediate format (e.g. camera).descriptor.use_flags &= ~BO_USE_HW_VIDEO_ENCODER;supported = mod->driver->is_supported(&descriptor);}if (!supported) {drv_log("Unsupported combination -- HAL format: %u, HAL usage: %u, ""drv_format: %4.4s, use_flags: %llu\n",format, usage, reinterpret_cast<char *>(&descriptor.drm_format),static_cast<unsigned long long>(descriptor.use_flags));return -EINVAL;}ret = mod->driver->allocate(&descriptor, handle);if (ret)return ret;auto hnd = cros_gralloc_convert_handle(*handle);*stride = hnd->pixel_stride;return 0;
}
这块我们先从整体概括下该部分的核心逻辑:
- 判断是否支持申请buffer的format
- 如支持则通过driver的allocate申请buffer
- 然后将申请的buffer返回
我们接着往下看driver是如何allocate的:
//cros_gralloc/cros_gralloc_driver.cc
int32_t cros_gralloc_driver::allocate(const struct cros_gralloc_buffer_descriptor *descriptor,buffer_handle_t *out_handle)
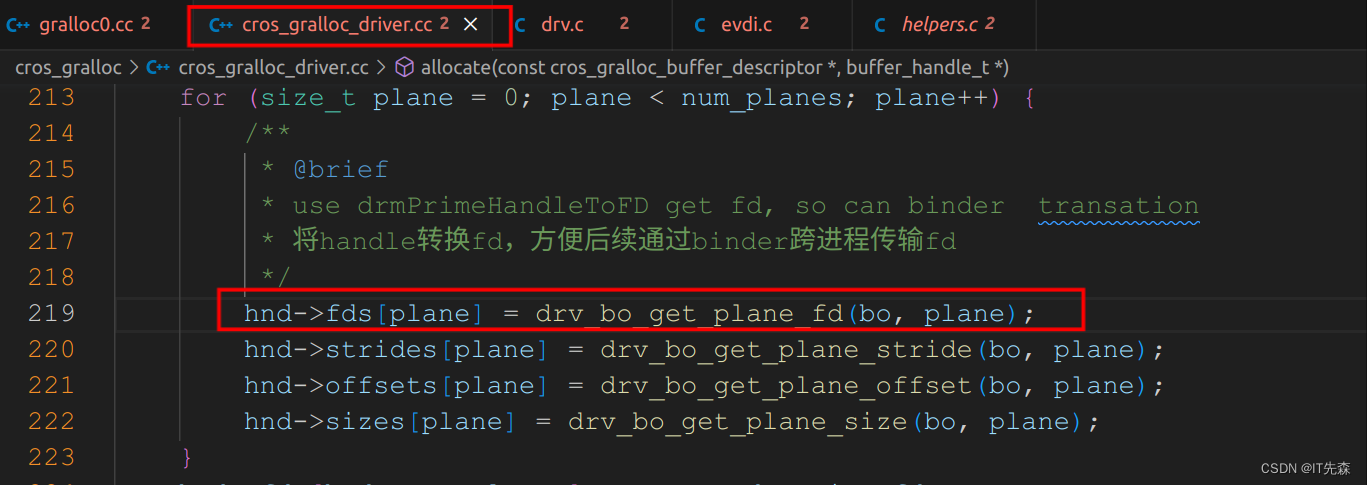
{uint32_t id;size_t num_planes;size_t num_fds;size_t num_ints;size_t num_bytes;uint32_t resolved_format;uint32_t bytes_per_pixel;uint64_t use_flags;int32_t reserved_region_fd;char *name;struct bo *bo;struct cros_gralloc_handle *hnd;resolved_format = drv_resolve_format(drv_, descriptor->drm_format, descriptor->use_flags);use_flags = descriptor->use_flags;/** TODO(b/79682290): ARC++ assumes NV12 is always linear and doesn't* send modifiers across Wayland protocol, so we or in the* BO_USE_LINEAR flag here. We need to fix ARC++ to allocate and work* with tiled buffers.*/if (resolved_format == DRM_FORMAT_NV12)use_flags |= BO_USE_LINEAR;/** This unmask is a backup in the case DRM_FORMAT_FLEX_IMPLEMENTATION_DEFINED is resolved* to non-YUV formats.*/if (descriptor->drm_format == DRM_FORMAT_FLEX_IMPLEMENTATION_DEFINED &&(resolved_format == DRM_FORMAT_XBGR8888 || resolved_format == DRM_FORMAT_ABGR8888)) {use_flags &= ~BO_USE_HW_VIDEO_ENCODER;}/*** @brief * construct struct bo*/bo = drv_bo_create(drv_, descriptor->width, descriptor->height, resolved_format, use_flags);if (!bo) {drv_log("Failed to create bo.\n");return -ENOMEM;}/** If there is a desire for more than one kernel buffer, this can be* removed once the ArcCodec and Wayland service have the ability to* send more than one fd. GL/Vulkan drivers may also have to modified.*/if (drv_num_buffers_per_bo(bo) != 1) {drv_bo_destroy(bo);drv_log("Can only support one buffer per bo.\n");return -EINVAL;}num_planes = drv_bo_get_num_planes(bo);num_fds = num_planes;if (descriptor->reserved_region_size > 0) {reserved_region_fd =create_reserved_region(descriptor->name, descriptor->reserved_region_size);if (reserved_region_fd < 0) {drv_bo_destroy(bo);return reserved_region_fd;}num_fds += 1;} else {reserved_region_fd = -1;}num_bytes = sizeof(struct cros_gralloc_handle);num_bytes += (descriptor->name.size() + 1);/** Ensure that the total number of bytes is a multiple of sizeof(int) as* native_handle_clone() copies data based on hnd->base.numInts.*/num_bytes = ALIGN(num_bytes, sizeof(int));num_ints = num_bytes - sizeof(native_handle_t) - num_fds;/** malloc is used as handles are ultimetly destroyed via free in* native_handle_delete().*/hnd = static_cast<struct cros_gralloc_handle *>(malloc(num_bytes));hnd->base.version = sizeof(hnd->base);hnd->base.numFds = num_fds;hnd->base.numInts = num_ints;hnd->num_planes = num_planes;for (size_t plane = 0; plane < num_planes; plane++) {/*** @brief * use drmPrimeHandleToFD get fd, so can binder transation* 将handle转换fd,方便后续通过binder跨进程传输fd*/hnd->fds[plane] = drv_bo_get_plane_fd(bo, plane);hnd->strides[plane] = drv_bo_get_plane_stride(bo, plane);hnd->offsets[plane] = drv_bo_get_plane_offset(bo, plane);hnd->sizes[plane] = drv_bo_get_plane_size(bo, plane);}hnd->fds[hnd->num_planes] = reserved_region_fd;hnd->reserved_region_size = descriptor->reserved_region_size;static std::atomic<uint32_t> next_buffer_id{ 1 };hnd->id = next_buffer_id++;hnd->width = drv_bo_get_width(bo);hnd->height = drv_bo_get_height(bo);hnd->format = drv_bo_get_format(bo);hnd->format_modifier = drv_bo_get_plane_format_modifier(bo, 0);hnd->use_flags = descriptor->use_flags;bytes_per_pixel = drv_bytes_per_pixel_from_format(hnd->format, 0);hnd->pixel_stride = DIV_ROUND_UP(hnd->strides[0], bytes_per_pixel);hnd->magic = cros_gralloc_magic;hnd->droid_format = descriptor->droid_format;hnd->usage = descriptor->droid_usage;hnd->total_size = descriptor->reserved_region_size + bo->meta.total_size;hnd->name_offset = handle_data_size;name = (char *)(&hnd->base.data[hnd->name_offset]);snprintf(name, descriptor->name.size() + 1, "%s", descriptor->name.c_str());id = drv_bo_get_plane_handle(bo, 0).u32;/*** @brief * new class cros_gralloc_buffer*/auto buffer = new cros_gralloc_buffer(id, bo, hnd, hnd->fds[hnd->num_planes],hnd->reserved_region_size);std::lock_guard<std::mutex> lock(mutex_);buffers_.emplace(id, buffer);handles_.emplace(hnd, std::make_pair(buffer, 1));/*** @brief * return buffer_handle_t*/*out_handle = reinterpret_cast<buffer_handle_t>(hnd);return 0;
}
代码量比较多,但是我们是有原则的,不能啥都啃,不然咋下嘴不是。上面的代码核心逻辑主要为:
- 构建struct bo对象
- 然后通过博对象,填充cros_gralloc_handle
- 然后继续将前面构建出来的相关对象填充cros_gralloc_buffer
- 然后将buffer和handle以一定的结构保存
我们对前面的分开展开,继续分析,先看drv_bo_create的实现:
//drv.c
struct bo *drv_bo_create(struct driver *drv, uint32_t width, uint32_t height, uint32_t format,uint64_t use_flags)
{int ret;size_t plane;struct bo *bo;bool is_test_alloc;is_test_alloc = use_flags & BO_USE_TEST_ALLOC;use_flags &= ~BO_USE_TEST_ALLOC;/*** @brief * new struct bo*/bo = drv_bo_new(drv, width, height, format, use_flags, is_test_alloc);if (!bo)return NULL;ret = -EINVAL;if (drv->backend->bo_compute_metadata) {ret = drv->backend->bo_compute_metadata(bo, width, height, format, use_flags, NULL,0);if (!is_test_alloc && ret == 0)ret = drv->backend->bo_create_from_metadata(bo);} else if (!is_test_alloc) {/*** @brief * use backend bo_create*/ret = drv->backend->bo_create(bo, width, height, format, use_flags);}if (ret) {free(bo);return NULL;}pthread_mutex_lock(&drv->driver_lock);for (plane = 0; plane < bo->meta.num_planes; plane++) {if (plane > 0)assert(bo->meta.offsets[plane] >= bo->meta.offsets[plane - 1]);drv_increment_reference_count(drv, bo, plane);}pthread_mutex_unlock(&drv->driver_lock);return bo;
}
上面代码的核心逻辑主要是通过backend的bo_create函数继续填充struct bo,战斗还没有完,我们接着继续往下看:
bo_createdrv_dumb_bo_create()drv_dumb_bo_create_ex()// helpers.c
int drv_dumb_bo_create_ex(struct bo *bo, uint32_t width, uint32_t height, uint32_t format,uint64_t use_flags, uint64_t quirks)
{int ret;size_t plane;uint32_t aligned_width, aligned_height;struct drm_mode_create_dumb create_dumb;aligned_width = width;aligned_height = height;switch (format) {case DRM_FORMAT_R16:/* HAL_PIXEL_FORMAT_Y16 requires that the buffer's width be 16 pixel* aligned. See hardware/interfaces/graphics/common/1.0/types.hal. */aligned_width = ALIGN(width, 16);break;case DRM_FORMAT_YVU420_ANDROID:/* HAL_PIXEL_FORMAT_YV12 requires that the buffer's height not* be aligned. Update 'height' so that drv_bo_from_format below* uses the non-aligned height. */height = bo->meta.height;/* Align width to 32 pixels, so chroma strides are 16 bytes as* Android requires. */aligned_width = ALIGN(width, 32);/* Adjust the height to include room for chroma planes. */aligned_height = 3 * DIV_ROUND_UP(height, 2);break;case DRM_FORMAT_YVU420:case DRM_FORMAT_NV12:case DRM_FORMAT_NV21:/* Adjust the height to include room for chroma planes */aligned_height = 3 * DIV_ROUND_UP(height, 2);break;default:break;}memset(&create_dumb, 0, sizeof(create_dumb));if (quirks & BO_QUIRK_DUMB32BPP) {aligned_width =DIV_ROUND_UP(aligned_width * layout_from_format(format)->bytes_per_pixel[0], 4);create_dumb.bpp = 32;} else {create_dumb.bpp = layout_from_format(format)->bytes_per_pixel[0] * 8;}create_dumb.width = aligned_width;create_dumb.height = aligned_height;create_dumb.flags = 0;ret = drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_CREATE_DUMB, &create_dumb);if (ret) {drv_log("DRM_IOCTL_MODE_CREATE_DUMB failed (%d, %d)\n", bo->drv->fd, errno);return -errno;}drv_bo_from_format(bo, create_dumb.pitch, height, format);/*** @brief * store obj_gem handle*/for (plane = 0; plane < bo->meta.num_planes; plane++)bo->handles[plane].u32 = create_dumb.handle;bo->meta.total_size = create_dumb.size;return 0;
}
对于libdrm比较熟悉的小伙伴来说,上面就比较简单了通过ioctl的DRM_IOCTL_MODE_CREATE_DUMB指令,申请构建GEM buffer。我们知道gem_obj的handle是不同跨进程传输的,必须转换成fd才行,这个是在那个地方执行的呢?
//drv.c
int drv_bo_get_plane_fd(struct bo *bo, size_t plane)
{int ret, fd;assert(plane < bo->meta.num_planes);if (bo->is_test_buffer) {return -EINVAL;}/*** @brief * handle是每个gem context拥有的,不能跨进程传输。要跨进程传输可以将handle和fd联系起来。* fd可以跨进程传输,android大部分buffer都是通过binder传递fd,所以这里调用drmPrimeHandleToFD* 将gem_obj的句柄handle转换成fd以便于传输*/ret = drmPrimeHandleToFD(bo->drv->fd, bo->handles[plane].u32, DRM_CLOEXEC | DRM_RDWR, &fd);// Older DRM implementations blocked DRM_RDWR, but gave a read/write mapping anywaysif (ret)ret = drmPrimeHandleToFD(bo->drv->fd, bo->handles[plane].u32, DRM_CLOEXEC, &fd);return (ret) ? ret : fd;
}
到这里基allocate的流程就基本就结尾了,其核心逻辑用伪代码表示就是
drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_CREATE_DUMB, &create_dumb)
drmPrimeHandleToFD
2.6 minigbm的graloc hal下import的实现
我们知道当进程通过sf申请到GraphicBuffer之后,并不能立马使用必须通过import映射到申请的进程才行,这里我们看看底下import是如何实现的。我们通过前面gralloc的hal注册可知,registerBuffer指向了gralloc0_register_buffer,所以我们只需要看它的实现逻辑即可:
//cros_gralloc/gralloc0/gralloc0.cc
gralloc0_register_buffer()mod->driver->retain(handle)int32_t cros_gralloc_driver::retain(buffer_handle_t handle)
{uint32_t id;std::lock_guard<std::mutex> lock(mutex_);auto hnd = cros_gralloc_convert_handle(handle);if (!hnd) {drv_log("Invalid handle.\n");return -EINVAL;}auto buffer = get_buffer(hnd);if (buffer) {handles_[hnd].second++;buffer->increase_refcount();return 0;}/*** @brief Construct a new if object* https://juejin.cn/post/7184685220158210107* 从fd导入bo* gem都是通过handle去查找一个bo,要通过fd转换成一个bo,首先要将fd转换成handle。drm提供了* drmPrimeFDToHandle 接口,获得fd 对应的handle。* 对应的handle 转fd函数是drmPrimeHandleToFD*/if (drmPrimeFDToHandle(drv_get_fd(drv_), hnd->fds[0], &id)) {drv_log("drmPrimeFDToHandle failed.\n");return -errno;}/*** @brief * */if (buffers_.count(id)) {buffer = buffers_[id];buffer->increase_refcount();} else {struct bo *bo;struct drv_import_fd_data data;data.format = hnd->format;data.width = hnd->width;data.height = hnd->height;data.use_flags = hnd->use_flags;memcpy(data.fds, hnd->fds, sizeof(data.fds));memcpy(data.strides, hnd->strides, sizeof(data.strides));memcpy(data.offsets, hnd->offsets, sizeof(data.offsets));for (uint32_t plane = 0; plane < DRV_MAX_PLANES; plane++) {data.format_modifiers[plane] = hnd->format_modifier;}/*** @brief * It's not going to be this way.* DRM_IOCTL_PRIME_FD_TO_HANDLE*/bo = drv_bo_import(drv_, &data);if (!bo)return -EFAULT;id = drv_bo_get_plane_handle(bo, 0).u32;buffer = new cros_gralloc_buffer(id, bo, nullptr, hnd->fds[hnd->num_planes],hnd->reserved_region_size);buffers_.emplace(id, buffer);}handles_.emplace(hnd, std::make_pair(buffer, 1));return 0;
}
这块的逻辑比较简单,就是取出前面aallocate中构建的buffer,看是否存在存在取出,没有则继续后续逻辑。
2.7 minigbm的graloc hal下lock的实现
当我们上层创建出来的GraphicBuffer被创建出来后,在正式被使用前还必须要lock锁定这块,才能被正式使用,我们看看mingi是如何实现的。
.lockAsync = gralloc0_lock_async
lock = gralloc0_lockmodule->lockAsyncgralloc0_lock_asyncauto hnd = cros_gralloc_convert_handle(handle)map_flags = gralloc0_convert_map_usage(usage)mod->driver->lock()cros_gralloc_driver::lockhnd = cros_gralloc_convert_handle(handle)auto buffer = get_buffer(hnd)buffer->lock()//cros_gralloc_buffer::lock
这里我们展开来看下cros_gralloc_buffer::lock的实现:
//cros_gralloc/cros_gralloc_buffer.cc
int32_t cros_gralloc_buffer::lock(const struct rectangle *rect, uint32_t map_flags,uint8_t *addr[DRV_MAX_PLANES])
{void *vaddr = nullptr;memset(addr, 0, DRV_MAX_PLANES * sizeof(*addr));/** Gralloc consumers don't support more than one kernel buffer per buffer object yet, so* just use the first kernel buffer.*/if (drv_num_buffers_per_bo(bo_) != 1) {drv_log("Can only support one buffer per bo.\n");return -EINVAL;}if (map_flags) {if (lock_data_[0]) {drv_bo_invalidate(bo_, lock_data_[0]);vaddr = lock_data_[0]->vma->addr;} else {struct rectangle r = *rect;if (!r.width && !r.height && !r.x && !r.y) {/** Android IMapper.hal: An accessRegion of all-zeros means the* entire buffer.*/r.width = drv_bo_get_width(bo_);r.height = drv_bo_get_height(bo_);}vaddr = drv_bo_map(bo_, &r, map_flags, &lock_data_[0], 0);}if (vaddr == MAP_FAILED) {drv_log("Mapping failed.\n");return -EFAULT;}}for (uint32_t plane = 0; plane < num_planes_; plane++)addr[plane] = static_cast<uint8_t *>(vaddr) + drv_bo_get_plane_offset(bo_, plane);lockcount_++;return 0;
}
里面核心的逻辑就是drv_bo_map,我们看看他的逻辑是什么:
.bo_map = drv_dumb_bo_map,
//drv.caddr = bo->drv->backend->bo_map(bo, mapping.vma, plane, map_flags)
//helpers.c
void *drv_dumb_bo_map(struct bo *bo, struct vma *vma, size_t plane, uint32_t map_flags)
{int ret;size_t i;struct drm_mode_map_dumb map_dumb;memset(&map_dumb, 0, sizeof(map_dumb));map_dumb.handle = bo->handles[plane].u32;/*** @brief * map kerne space to user space*/ret = drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_MAP_DUMB, &map_dumb);if (ret) {drv_log("DRM_IOCTL_MODE_MAP_DUMB failed\n");return MAP_FAILED;}for (i = 0; i < bo->meta.num_planes; i++)if (bo->handles[i].u32 == bo->handles[plane].u32)vma->length += bo->meta.sizes[i];return mmap(0, vma->length, drv_get_prot(map_flags), MAP_SHARED, bo->drv->fd,map_dumb.offset);
}
三.总结
通过前面的分析,我们可以知道minigbm将libdrm的操作剥离出Mesa架构,然后调用libdrm的用户层接口申请dumb buffer,然后封装成GraphicBuffer给上层使用。关于DRM入门的知识重点推荐何小龙大神的DRM(Direct Rendering Manager)学习简介。好了今天的博客Android minigbm框架普法就到这里了。总之,青山不改绿水长流先到这里了。如果本博客对你有所帮助,麻烦关注或者点个赞,如果觉得很烂也可以踩一脚!谢谢各位了!!
相关文章:
Android minigbm框架普法
Android minigbm框架普法 引言 假设存在这么一个场景,我的GPU的上层实现走的不是标准的Mesa接口,且GPU也没有提专门配套的gralloc和hwcompoer实现。那么我们的Android要怎么使用到EGL和GLES库呢,并且此GPU驱动是支持drm实现的,也有…...
01、MongoDB -- 下载、安装、配置文件等配置 及 副本集配置
目录 MongoDB -- 下载、安装、配置 及 副本集配置启动命令启动 mongodb 的服务器(单机和副本集)启动单机模式的 mongodb 服务器启动副本集的 3 个副本节点(mongodb 服务器) 启动 mongodb 的客户端 MongoDB 下载MongoDB 安装1、解压…...

uniapp中导入css和scss的区别
在项目中编写了一个基础的公共样式 common.scss文件 想要将其 导入到app.vue文件中 第一次使用的是import url(static/common.scss); 编译直接报错,无法识别这个文件 原因是 使用import url()是CSS中用于导入外部样式表的语法,但它不适用于导入SCS…...
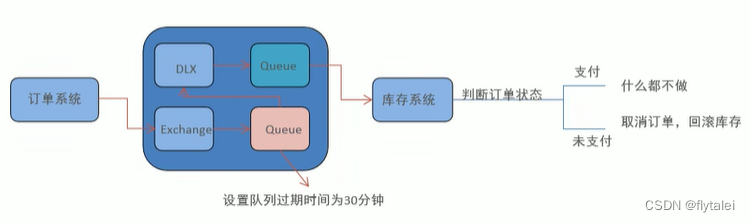
RabbitMQ-TTL/死信队列/延迟队列高级特性
文章目录 TTL死信队列消息成为死信的三种情况队列如何绑定死信交换机 延迟队列RabbitMQ如何实现延迟队列 总结来源B站黑马程序员 TTL TTLTTL(Time To Live):存活时间/过期时间当信息到达存活时间后,还没有被消费,会被自动清除。RabbitMQ可以对消息设置过…...
)
docker安装php7.4安装(swoole)
容器 docker pull centos:centos7 docker run -dit -p9100:9100 --name“dade” --privilegedtrue centos:centos7 /usr/sbin/init 一、安装前库文件和工具准备 1、首先安装 EPEL 源 yum -y install epel-release2.安装 REMI 源 yum -y install http://rpms.remirepo.net/en…...
身份证识别系统(安卓)
设计内容与要求: 通过手机摄像头捕获身份证信息,将身份证上的姓名、性别、出生年月、身份证号码保存在数据库中。1)所开发Apps软件至少需由3-5个以上功能性界面组成。要求:界面美观整洁、方便应用;可以使用Android原生…...

Python教程——最后一波来喽
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 1.使用__slots__2. property3.多重继承 4.定制类5.枚举类6.错误处理7.调试8. 文档测试9.单元测试10. 文件读写11. StringIO和BytesIO12. 操作文件和目录13.序列化14…...
)
学生管理系统(python实现)
新增学生显示学生查找学生删除学生存档到文件 约定好数据的存储格式: 约定把数据保存在和py文件同级目录中,文件名为record.txt 文件内容按照行文本的方式来表示 首先这是一个文本文件,里面包含了很多行,每一行代表一个学生 …...
Java读取文件
读取文件为String 、访问链接直接跳转html 环境:SpringMVC 、前端jsp InputStreamReader FileInputStream fileInputStream new FileInputStream(formatFile.getHtmlpath());InputStreamReader reader new InputStreamReader(fileInputStream, StandardCharsets…...
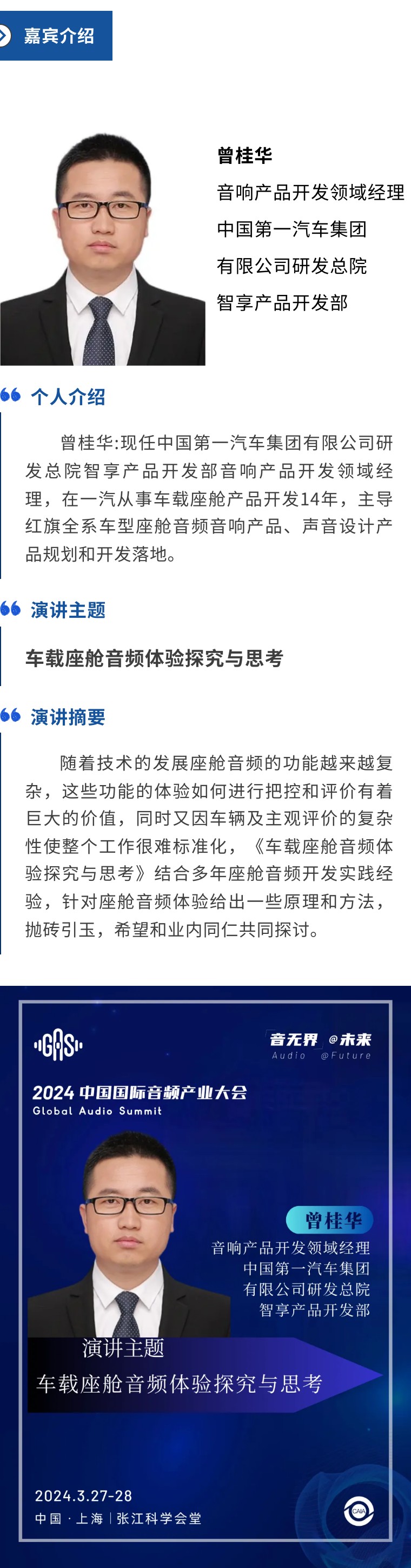
曾桂华:车载座舱音频体验探究与思考| 演讲嘉宾公布
智能车载音频 I 分论坛将于3月27日同期举办! 我们正站在一个前所未有的科技革新的交汇点上,重塑我们出行体验的变革正在悄然发生。当人工智能的磅礴力量与车载音频相交融,智慧、便捷与未来的探索之旅正式扬帆起航。 在驾驶的旅途中࿰…...
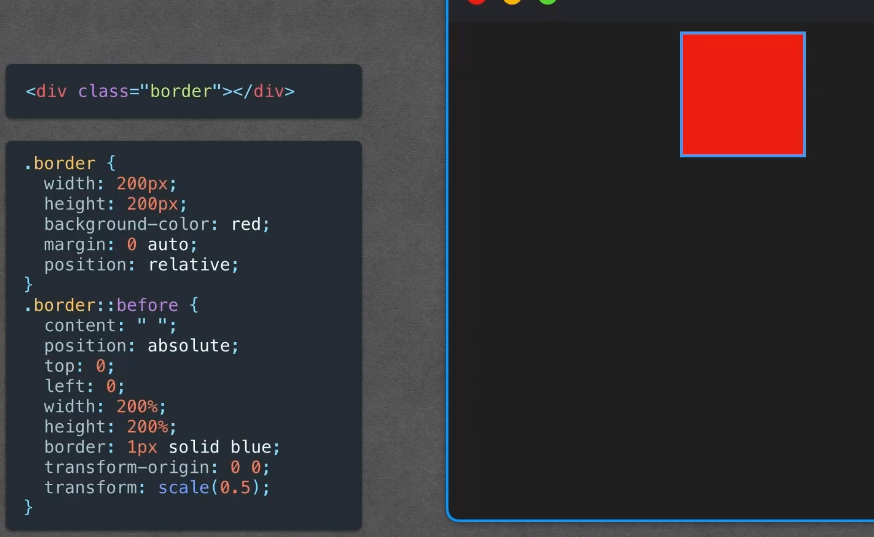
面试题HTML+CSS+网络+浏览器篇
文章目录 Css预处理sass less是什么?为什么使用他们怎么转换 less 为 css?重绘和回流是什么http 是什么?有什么特点HTTP 协议和 HTTPS 区别什么是 CSRF 攻击HTML5 新增的内容有哪些Css3 新增的特性flex VS grid清除浮动的方式有哪些ÿ…...
wordpress外贸独立站
WordPress外贸电商主题 简洁实用的wordpress外贸电商主题,适合做外贸跨境的电商公司官网使用。 https://www.jianzhanpress.com/?p5025 华强北面3C数码WordPress外贸模板 电脑周边、3C数码产品行业的官方网站使用,用WordPress外贸模板快速搭建外贸网…...
)
[python] 构建数据流水线(pipeline)
Plum 是一个用于构建数据流水线(pipeline)的 Python 库,它旨在简化和优化数据处理流程,使得数据流转和处理变得更加清晰、高效和可维护。下面我将更详细地介绍 Plum 的特点、功能和使用方法。 Plum 的主要特点和功能:…...
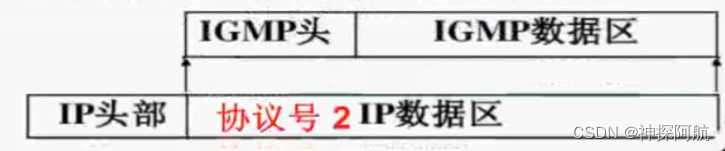
计算机网络-网络互连和互联网(五)
1.路由器技术NAT: 网络地址翻译,解决IP短缺,路由器内部和外部地址进行转换。静态地址转换:静态NAT(一对一) 静态NAT,内外一对一转换,用于web服务器,ftp服务器等固定IP的…...

【深度学习】Pytorch基础
张量 运算与操作 加减乘除 pytorch中tensor运算逐元素进行,或者一一对应计算 常用操作 典型维度为N X C X H X W,N为图像张数,C为图像通道数,HW为图高宽。 sum() 一般,指定维度,且keepdimTrue该维度上元…...
C++模拟揭秘刘谦魔术,领略数学的魅力
新的一年又开始了,大家新年好呀~。在这我想问大家一个问题,有没有同学看了联欢晚会上刘谦的魔术呢? 这个节目还挺有意思的,它最出彩的不是魔术本身,而是小尼老师“念错咒语”而导致他手里的排没有拼在一起,…...

JAVA语言编写一个方法,两个Long参数传入,使用BigDecimal类,计算相除四舍五入保留2位小数返回百分数。
在Java中,你可以使用BigDecimal类来执行精确的浮点数计算,并且可以指定结果的小数位数。以下是一个方法,它接受两个Long类型的参数,并使用BigDecimal来计算它们的商,然后将结果四舍五入到两位小数,并返回一…...

SQL教学:掌握MySQL数据操作核心技能--DML语句基本操作之“增删改查“
大家好,今天我要给大家分享的是SQL-DML语句教学。DML,即Data Manipulation Language,也就是我们常说的"增 删 改 查",是SQL语言中用于操作数据库中数据的一部分。作为MySQL新手小白,掌握DML语句对于数据库数…...
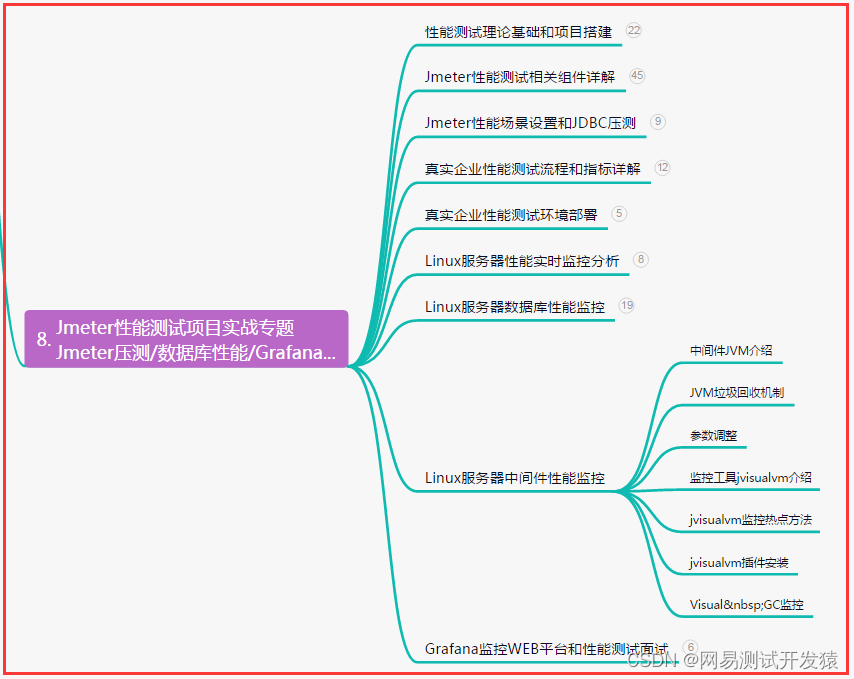
【性能测试】Jmeter性能压测-阶梯式/波浪式场景总结(详细)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、阶梯式场景&am…...
前端面试 跨域理解
2 实现 2-1 JSONP 实现 2-2 nginx 配置 2-2 vue 开发中 webpack自带跨域 2 -3 下载CORS 插件 或 chrome浏览器配置跨域 2-4 通过iframe 如:aaa.com 中读取bbb.com的localStorage 1)在aaa.com的页面中,在页面中嵌入一个src为bbb.com的iframe&#x…...

Unity URDF导入器终极指南:快速实现机器人仿真环境搭建
Unity URDF导入器终极指南:快速实现机器人仿真环境搭建 【免费下载链接】URDF-Importer URDF importer 项目地址: https://gitcode.com/gh_mirrors/ur/URDF-Importer 在机器人仿真开发领域,Unity URDF导入器是一个革命性的工具,它让开…...
)
从零开发游戏需要学习的c#模块,第十九章(在游戏画面里显示文字 —— FontStashSharp)
本节课我们要学习的内容是安装字体渲染库加载系统字体文件在游戏画面里直接显示分数、金币数等信息第一步:安装 NuGet 包在 Visual Studio 右侧“解决方案资源管理器”里,右键你的项目名(不是解决方案)选择 “管理 NuGet 程序包”…...

基于LSTM的无人艇波浪方向估计:从时序预测到工程实践
1. 项目概述:当无人艇“学会”感知海浪在海洋工程和无人系统领域,让机器“感知”并“理解”它所处的海洋环境,尤其是波浪的动态特性,一直是个核心挑战。想象一下,你驾驶一艘小船,如果能提前几秒甚至更久“预…...

Unity节点化效率工具:ComfyUI范式赋能中大型项目开发
1. 这不是又一个“UI美化插件”,而是Unity开发者每天要敲十次的底层效率杠杆Efficiency Nodes ComfyUI——光看名字,很多人第一反应是“ComfyUI?那不是Stable Diffusion的可视化工作流工具吗?怎么跑Unity里来了?”这恰…...

微信社群开发wechat ipad协议
WTAPI框架wechat ipad协议 微信社群开发,开发微信机器人/微信个人号二次开发你可以 通过WTAPI 框架实现 个性化微信功能 (例云发单助手、社群小助手、客服系统、机器人等),用来自动管理微信消息。用户仅可一次对接,完善…...

淘金币自动化脚本:每天节省20分钟,解放双手的终极指南
淘金币自动化脚本:每天节省20分钟,解放双手的终极指南 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojinb…...

qb-web测试策略:Jest单元测试与Vue组件测试最佳实践
qb-web测试策略:Jest单元测试与Vue组件测试最佳实践 【免费下载链接】qb-web A qBittorrent Web UI, write in TypeScriptVue. 项目地址: https://gitcode.com/gh_mirrors/qb/qb-web qb-web作为基于TypeScriptVue开发的qBittorrent Web UI,采用Je…...

性价比高的卫浴软件供应商
在卫浴行业数字化转型浪潮中,蓝猿BLUEAPE大力投入AI建设,其成果融入产品,为企业带来高效解决方案。降低成本,提升效率蓝猿云册多端同步,省略传统纸质画册印刷等环节,降低样品制作与分发成本,某卫…...

为什么你的蓝晒图总像“褪色老照片”?3个被忽略的--stylize权重陷阱,今晚失效前速查
更多请点击: https://kaifayun.com 第一章:蓝晒法的光学本质与数字转译悖论 蓝晒法(Cyanotype)作为一种1842年诞生的古典摄影工艺,其核心依赖于铁盐在紫外光照射下发生的光还原反应:柠檬酸铁铵与铁氰化钾…...

艾络迅 × 荣耀:联合推出Meteer AI跳舞机器人玩具,智能科技重新定义儿童陪伴
在快节奏的现代生活中,每个孩子都渴望获得专属的陪伴与关注。他们对音乐和律动有着天然的热爱,期待拥有能够与之互动、共同成长的智能伙伴。然而,传统玩具的单一功能已无法满足数字原生代儿童的多元化需求。 正是洞察到这一痛点,艾…...