NERF论文笔记(1/2)
NeRF:Representing Scene as Neural Radiance Fields for View Synthesis 笔记
摘要
实现了一个任意视角视图生成算法:输入稀疏的场景图像,通过优化连续的Volumetric场景函数实现;用全连接深度网络表达场景,输入是一个连续的5维坐标,3D坐标+2D角度(航向、俯仰角),输出Volume density和依赖于视图的emitted radiance,查询5维坐标并用经典的Volume Rendering把输出的颜色与强度投影到图像。
介绍
a. march camera rays,我理解为从焦点投射射线到场景,获取3D坐标点。
b. 用3D点 x \bold{x} x与对应的2D角度(用单位向量 d \bold{d} d)输入,输出颜色 c \bold{c} c和强度 σ \sigma σ。
c. 合成图像。
Neural Radiance Field场景表达
F θ : ( x , d ) → ( c , σ ) F_{\theta}:(\bold{x},\bold{d})\rarr(\bold{c},\sigma) Fθ:(x,d)→(c,σ)
输出 σ \sigma σ只与输入位置坐标 x \bold{x} x有关, c \bold{c} c则与 x \bold{x} x、 d \bold{d} d有关。
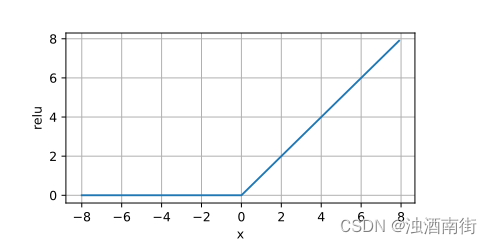
网络结构,输入 x \bold{x} x的8层全连接层,均为256通道,各层带ReLU激活,输出 σ \sigma σ、256维特征,此特征再与 d \bold{d} d聚合,输入一层带ReLU的全连接层,输出 c \bold{c} c。
Volume Rendering
位置坐标 x \bold{x} x表达为相机射线 r \bold{r} r, r ( t ) = o + t d \bold{r}(t)=\bold{o}+t\bold{d} r(t)=o+td,t是从焦点 o o o出发的长度,积分上下界是远端、近端。
C ( r ) = ∫ t n t f T ( t ) σ ( r ( t ) ) c ( r , d ) d t T ( t ) = e x p ( − ∫ t n t σ ( r ( s ) ) d s ) C(\bold{r})=\int_{t_{n}}^{t_{f}} T(t)\sigma(\bold{r}(t))\bold{c}(\bold{r},d)dt\\T(t)=exp(-\int_{t_{n}}^t\sigma(\bold{r}(s))ds) C(r)=∫tntfT(t)σ(r(t))c(r,d)dtT(t)=exp(−∫tntσ(r(s))ds)
T ( t ) T(t) T(t)的含义从 t n t_n tn到 t t t累积的transmittance,“the accumulated transmittance along the ray”,是射线从 t n t_n tn到 t t t未遇到其他粒子的概率。
求该积分的数值方法,Deterministic quadrature,笔者初步理解是一种数值计算方法,离散化近似:将区间分为N段,从每一段随机取样。
t i ∼ U [ t n + i − 1 N ( t f − t n ) , t n + i N ( t f − t n ) ] t_i\sim U[t_n+\frac{i-1}{N}(t_f-t_n),t_n+\frac{i}{N}(t_f-t_n)] ti∼U[tn+Ni−1(tf−tn),tn+Ni(tf−tn)]
参考Volume Rendering综述,
C ^ ( r ) = ∑ i = 1 N T i ( 1 − e x p ( − σ i δ i ) ) c i T i = e x p ( − ∑ j = 1 i − 1 σ j δ j ) δ j = t j + 1 − t j \hat C(\bold{r})=\sum_{i=1}^NT_i(1-exp(-\sigma_i\delta_i))\bold{c}_i\\ T_i=exp(-\sum_{j=1}^{i-1}\sigma_j\delta_j)\\ \delta_j=t_{j+1}-t_j C^(r)=i=1∑NTi(1−exp(−σiδi))ciTi=exp(−j=1∑i−1σjδj)δj=tj+1−tj
两项技术改进
只有上述设计不能达到SOTA,为此添加了两项重要改进,其中第二项是为了高效地实现第一项。
-
位置编码
直接输入上述5维做渲染,在场景中颜色和几何的高频变化的条件下表现较差,有参考证明深度网络偏向于学习低频函数,并发现在输入网络前用高频函数将数据映射到更高维,网络能更好拟合含有高频变化的数据。5维输入的各个元素 p p p被映射为长为2L的向量
γ ( p ) = ( s i n ( 2 0 π p ) , c o s ( 2 0 π p ) , . . . , s i n ( 2 L − 1 π p ) , c o s ( 2 L − 1 π p ) ) \gamma(p)=(sin(2^0{\pi}p),cos(2^0{\pi}p),...,sin(2^{L-1}{\pi}p),cos(2^{L-1}{\pi}p)) γ(p)=(sin(20πp),cos(20πp),...,sin(2L−1πp),cos(2L−1πp))
其中,位置元素L=10,方向元素L=4;各维元素均归一化到 [ − 1 , 1 ] [-1,1] [−1,1]。
Transformer有相似处理,但它的目的是给序列提供位置标签,因为Transformer结构不能标记顺序;NERF中的位置编码则是为了将输入升维以使得它的MLP能拟合更高频函数;从投影重建蛋白质3D结构的模型方法也使用了该思路。 -
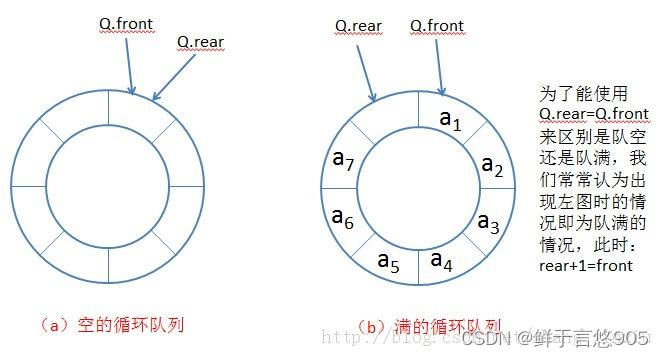
多层采样
采用两个网络,一个粗略,一个精细。首先用第一个网络生成颜色,每条射线输入 N c N_c Nc个位置,然后用其结果引导重新采样,使得 N f N_f Nf个采样点集中到体元附近,提高有效信息位置的样本权重,使用两次的采样来渲染。
相关文章:
)
NERF论文笔记(1/2)
NeRF:Representing Scene as Neural Radiance Fields for View Synthesis 笔记 摘要 实现了一个任意视角视图生成算法:输入稀疏的场景图像,通过优化连续的Volumetric场景函数实现;用全连接深度网络表达场景,输入是一个连续的5维…...

深入理解nginx一致性哈希负载均衡模块[上]
1. 引言 在现代的网络应用中,负载均衡是一个至关重要的组件。它能够分配流量到多个服务器上,实现高可用性和性能扩展。Nginx是一个广泛使用的高性能Web服务器和反向代理服务器,其负载均衡模块提供了多种算法来实现流量的分发。其中࿰…...

【Linux】Docker安装
卸载旧版Docker 新版docker无法覆盖旧版的,所以需要先卸载原来的旧版本 yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-selinux \docker-engine-selinux \docker-eng…...

动态SLAM论文阅读笔记
近期阅读了许多动态SLAM相关的论文,它们基本都是基于ORB-SLAM算法,下面简单记录一下它们的主要特点: 1.DynaSLAM 采用CNN网络进行分割多视图几何辅助的方式来判断动态点,并进行了背景修复工作。 2.Detect-SLAM 实时性问题&…...

数据挖掘:航空公司的客户价值分析
需求分析 理解并掌握聚类分析方法,掌握数据的标准化,掌握寻找最佳聚类数,掌握聚类的绘图,掌握聚类分析的应用场景。 系统实现 实验流程分析 借助航空公司数据,对客户进行分类对不同类别的客户进行特征分析…...

GIS之深度学习08:安装GPU环境下的pytorch
环境: cuda:12.1.1 cudnn:12.x pytorch:2.2.0 torchvision:0.17.0 Python:3.8 操作系统:win (本文安装一半才发现pytorch与cuda未对应,重新安装了cuda后才开始的&a…...

防患未然,OceanBase巡检工具应用实践——《OceanBase诊断系列》之五
1. OceanBase为什么要做巡检功能 尽管OceanBase拥有很好的MySQL兼容性,但在长期的生产环境中,部署不符合标准规范、硬件支持异常,或配置项错误等问题,这些短期不会出现的问题,仍会对数据库集群构成潜在的巨大风险。为…...
数据结构从入门到精通——队列
队列 前言一、队列1.1队列的概念及结构1.2队列的实现1.3队列的实现1.4扩展 二、队列面试题三、队列的具体实现代码Queue.hQueue.ctest.c队列的初始化队列的销毁入队列出队列返回队头元素返回队尾元素检测队列是否为空检测元素个数 前言 队列是一种特殊的线性数据结构ÿ…...
深度学习相关概念及术语总结
目录 1.CNN2.RNN3.LSTM4.NLP5.CV6.正向传播7.反向传播8.sigmoid 函数9.ReLU函数10.假设函数11.损失函数12.代价函数 1.CNN CNN 是卷积神经网络(Convolutional Neural Network)的缩写。卷积神经网络是一种深度学习模型,专门用于处理具有网格状…...
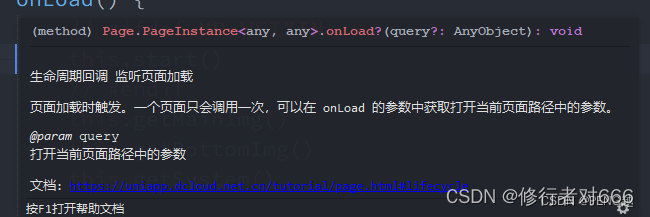
uniapp发行H5获取当前页面query
阅读uni的文档大致可得通过 onLoad与 onShow()的形参都能获取页面传递的参数,例如在开发时鼠标移动到方法上可以看到此方法的简短介绍 实际这里说的是打开当前页面的参数,在小程序端的时候测试并无问题,但是发行到H5时首页加载会造成参数获取…...

Flutter中动画的实现
动画三要素 控制动画的三要素:Animation、Tween、和AnmaitionController Animation: 产生的值的序列,有CurveAnimation等子类,, 可以将值赋值给Widget的宽高或其他属性,进而控制widget发生变化 Tween&#…...
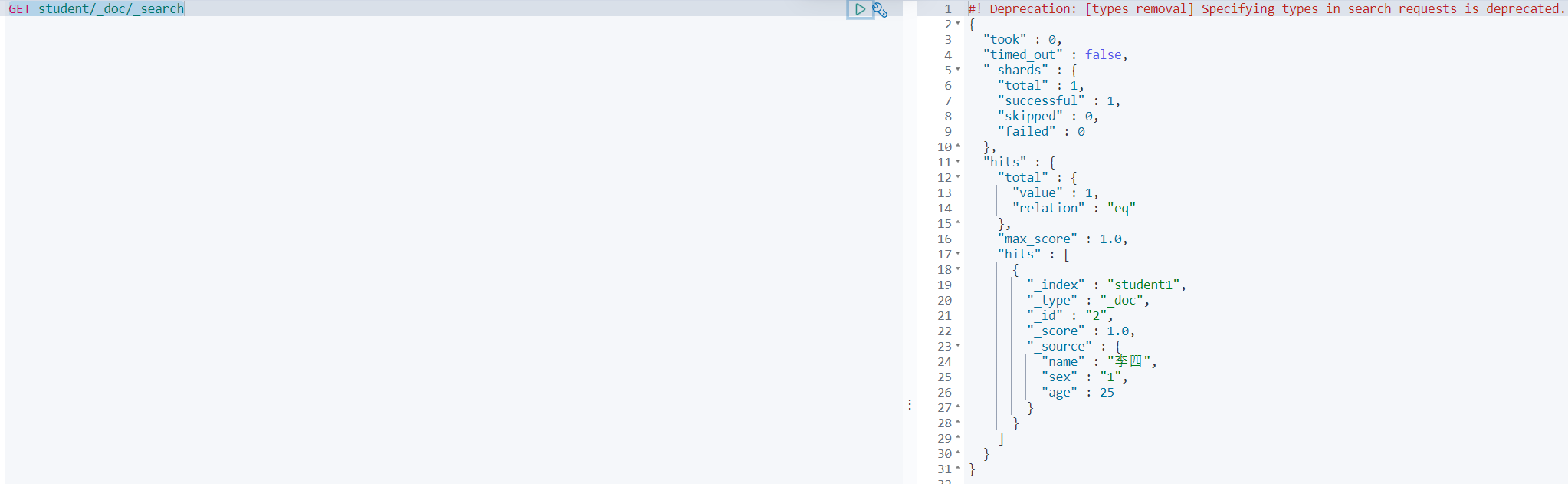
Elasticsearch从入门到精通-03基本语法学习
Elasticsearch从入门到精通-03基本语法学习 👏作者简介:大家好,我是程序员行走的鱼 📖 本篇主要介绍和大家一块学习一下ES基本语法,主要包括索引管理、文档管理、映射管理等内容 1.1 了解Restful ES对数据进行增、删、改、查是以…...
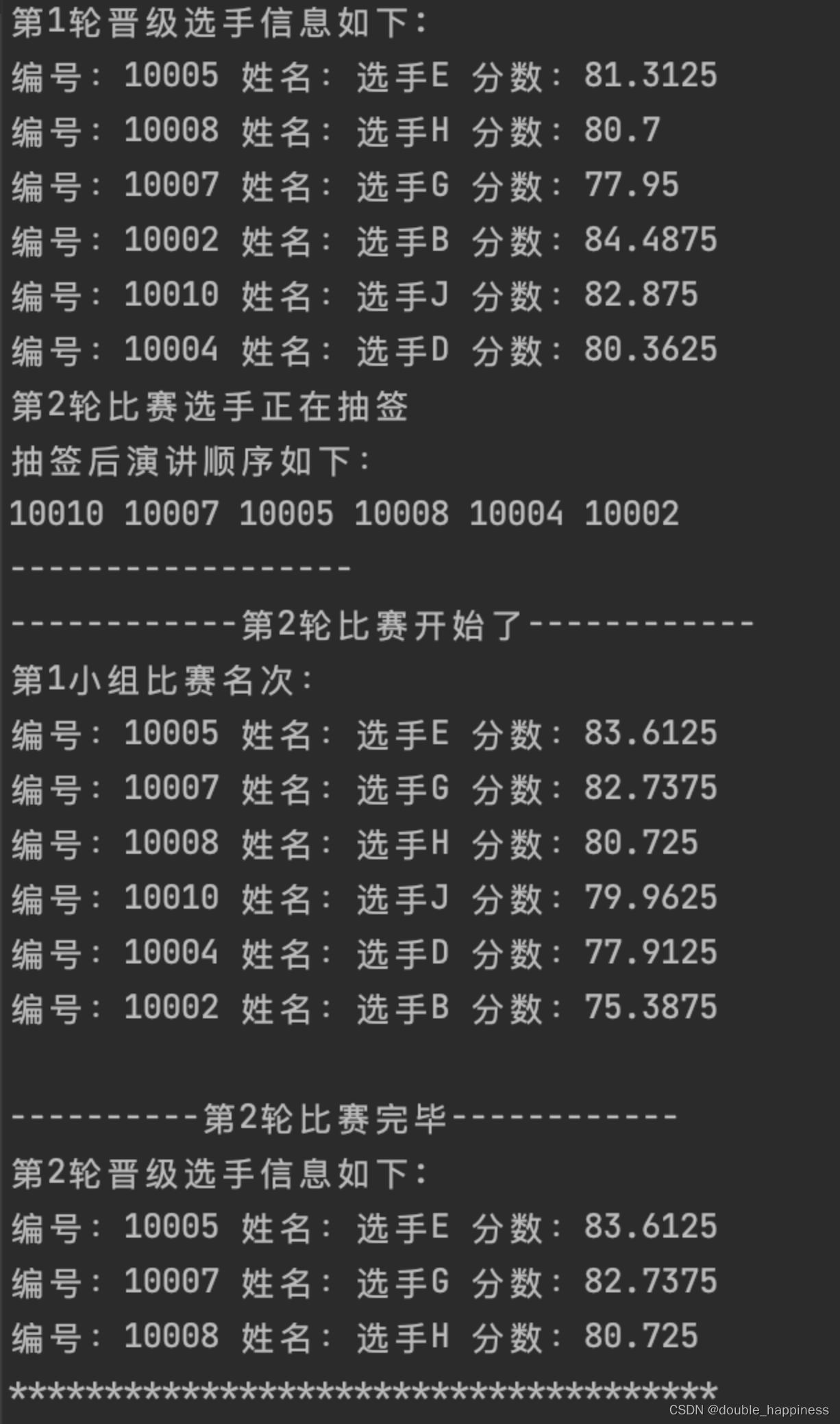
【黑马程序员】STL实战--演讲比赛管理系统
文章目录 演讲比赛管理系统需求说明比赛规则程序功能 创建管理类功能描述创建演讲比赛管理类 菜单功能添加菜单成员函数声明菜单成员函数实现菜单功能测试 退出功能添加退出功能声明退出成员函数实现退出功能测试 演讲比赛功能功能分析创建选手类比赛成员属性添加初始化属性创建…...
一文帮助快速入门Django
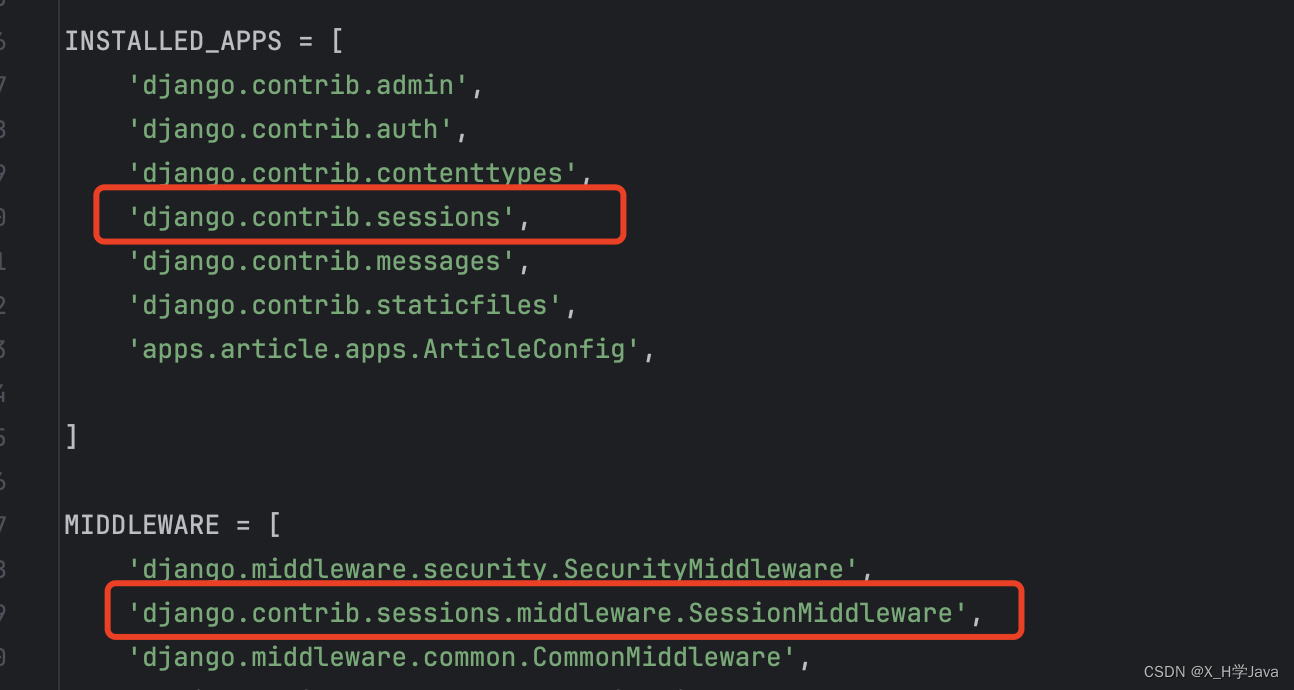
文章目录 创建django项目应用app配置pycharm虚拟环境打包依赖 路由传统路由include路由分发namenamespace 视图中间件orm关系对象映射操作表数据库配置model常见字段及参数orm基本操作 cookie和sessiondemo类视图 创建django项目 指定版本安装django:pip install dj…...
基于springboot实现图书推荐系统项目【项目源码+论文说明】计算机毕业设计
基于springboot实现图书馆推荐系统演示 摘要 时代的变化速度实在超出人类的所料,21世纪,计算机已经发展到各行各业,各个地区,它的载体媒介-计算机,大众称之为的电脑,是一种特高速的科学仪器,比…...

微信小程序实现上拉加载更多
一、前情提要 微信小程序中实现上拉加载更多,其实就是pc端项目的分页。使用的是scroll-view,scroll-view详情在微信开发文档/开发/组件/视图容器中。每次上拉,就是在原有数据基础上,拼接/合并上本次上拉请求得到的数据。这里采用…...
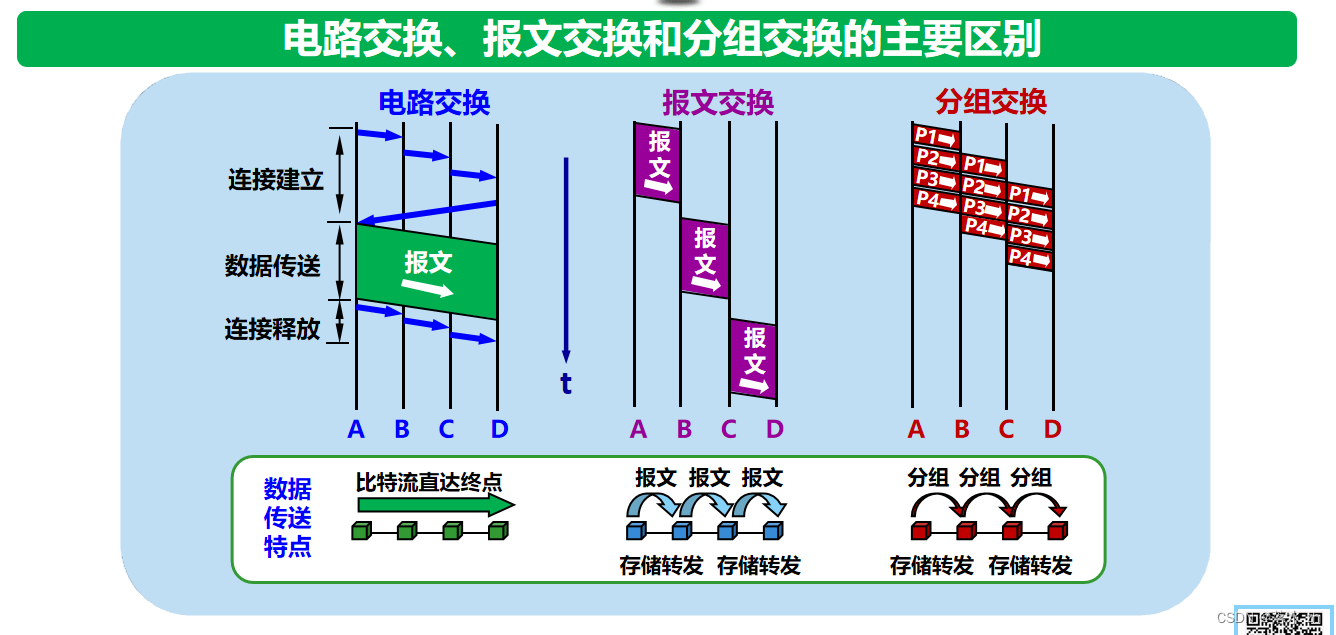
计算机网络——概述
计算机网络——概述 计算机网络的定义互连网(internet)互联网(Internet)互联网基础结构发展的三个阶段第一个阶段——APPANET第二阶段——商业化和三级架构第三阶段——全球范围多层次的ISP结构 ISP的作用终端互联网的组成边缘部分…...

kafka Interceptors and Listeners
Interceptors ProducerInterceptor https://www.cnblogs.com/huxi2b/p/7072447.html Producer拦截器(interceptor)是个相当新的功能,它和consumer端interceptor是在Kafka 0.10版本被引入的,主要用于实现clients端的定制化控制逻辑。 对于producer而言&…...

【面试题】mysql常见面试题及答案总结
事务中的ACID原则是什么? Mysql是如何实现或者保障ACID的? ACID原则是数据库事务管理中必须满足的四个基本属性,确保了数据库事务的可靠性和数据完整性。 简写全称解释实现A原子性(Atomicity)一个事务被视为一个不可分割的操作序列&#…...

C++ 类的前向声明的用法
我们知道C的类应当是先定义,然后使用。但在处理相对复杂的问题、考虑类的组合时,很可能遇到俩个类相互引用的情况,这种情况称为循环依赖。 例如: class A { public:void f(B b);//以B类对象b为形参的成员函数//这里编译错位&…...
)
告别‘一视同仁’:Focal Sparse Conv如何让3D检测网络学会‘看重点’(附KITTI实战)
告别“一视同仁”:Focal Sparse Conv如何让3D检测网络学会“看重点” 在自动驾驶和机器人领域,3D物体检测一直是核心技术难题之一。激光雷达扫描得到的点云数据天然具有稀疏性和不均匀性——前景物体(如车辆、行人)的体素往往比背…...

如何彻底修复Windows 11任务栏和开始菜单崩溃问题:ExplorerPatcher技术深度解析与实战指南
如何彻底修复Windows 11任务栏和开始菜单崩溃问题:ExplorerPatcher技术深度解析与实战指南 【免费下载链接】ExplorerPatcher This project aims to enhance the working environment on Windows 项目地址: https://gitcode.com/GitHub_Trending/ex/ExplorerPatch…...

3步掌握猫抓浏览器扩展:高效捕获网页媒体资源的实战指南
3步掌握猫抓浏览器扩展:高效捕获网页媒体资源的实战指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否经常遇到想要保存网页中…...

FanControl高级调校方案:Windows系统风扇精准控制与性能优化
FanControl高级调校方案:Windows系统风扇精准控制与性能优化 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trend…...

5分钟掌握Winhance中文版:Windows系统优化终极指南
5分钟掌握Winhance中文版:Windows系统优化终极指南 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/gh_mirrors/wi/Winhance-zh_CN…...

Ofd2Pdf:3种方法彻底解决OFD文档兼容性问题
Ofd2Pdf:3种方法彻底解决OFD文档兼容性问题 【免费下载链接】Ofd2Pdf Convert OFD files to PDF files. 项目地址: https://gitcode.com/gh_mirrors/ofd/Ofd2Pdf OFD作为中国自主的电子文档格式标准,在政务、金融、税务等领域广泛应用,…...

婚礼照片不用再群里发,宾客扫个码直接上传到共享相册
结过婚的人都知道,婚礼当天宾客拍的照片,最后都是零零散散发到群里或者私发给你。整理起来特别费劲,有些照片你还没看到,宾客就已经忘了发。等到婚礼结束想做一本纪念册,翻遍手机和各个群聊,还是找不到几张…...

别再只接电阻了!ITR9909反射光电管驱动能力不足?试试这颗BC517达林顿管的补救方案
光电传感器驱动困境破解:从ITR9909到BC517的实战升级方案 在电子DIY和自动化控制领域,反射式光电传感器因其非接触检测特性被广泛应用。但许多初学者在初次使用ITR9909这类反射光电管时,常会遇到一个令人困惑的问题——明明按照典型电路连接了…...

Cogito-v1-preview-llama-3B实战体验:手把手教你启用流式响应,实时对话更流畅
Cogito-v1-preview-llama-3B实战体验:手把手教你启用流式响应,实时对话更流畅 1. 认识Cogito-v1-preview-llama-3B模型 1.1 模型特点概述 Cogito-v1-preview-llama-3B是Deep Cogito推出的混合推理模型,在3B参数规模下展现出超越同类开源模…...

别再死记公式了!用Python+Statsmodels实战拆解AR模型的平稳性、自相关与偏自相关
别再死记公式了!用PythonStatsmodels实战拆解AR模型的平稳性、自相关与偏自相关 时间序列分析中,AR模型就像一位沉默的预言家,通过过去的数据点向我们传递未来的信息。但太多学习者被困在Green函数和Y-W方程的数学迷宫里,忘记了数…...