ROS Kinetic通信编程:话题、服务、动作编程
文章目录
- 一、话题编程
- 二、服务编程
- 三、动作编程
接上篇,继续学习ROS通信编程基础
一、话题编程
步骤:
- 创建发布者
- 初始化ROS节点
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 按照一定频率循环发布消息
- 创建订阅者
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接受到消息后进行回调函数
- 回调函数中完成消息处理
- 添加编译选项
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
- 设置依赖
- 运行可执行程序
talker.cpp
#include<sstream>
#include"ros/ros.h"
#include"std_msgs/String.h"
int main(int argc,char **argv)
{//ROS节点初始化ros::init(argc,argv,"talker");//创建节点句柄ros::NodeHandle n;//创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::Stringros::Publisher chatter_pub=n.advertise<std_msgs::String>("chatter",1000);//设置循环的频率ros::Rate loop_rate(10);int count=0;while(ros::ok()){//初始化std_msgs::String类型的消息std_msgs::String msg;std::stringstream ss;ss<<"hello world"<<count;msg.data=ss.str();//发布消息ROS_INFO("%s",msg.data.c_str());chatter_pub.publish(msg);//循环等待回调函数ros::spinOnce();//接受循环频率延时loop_rate.sleep();++count;}return 0;
}listener.cpp
#include"ros/ros.h"
#include"std_msgs/String.h"
//接收到订阅的消息,会进入消息的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{//将接收到的消息打印处理ROS_INFO("I heard:{%s}",msg->data.c_str());
}
int main(int argc,char **argv)
{//初始化ROS节点ros::init(argc,argv,"listener");//创建节点句柄ros::NodeHandle n;//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallbackros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);//循环等待回调函数ros::spin();return 0;
}在CMakeLists.txt末尾添加编译选项
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})编译
cd catkin_ws
catkin_make

运行程序
# 以下是对于Ubantu 16.04的操作,其他版本的也许操作会简洁很多
roscore
#打开新终端
cd ~/catkin_ws
#下面这一步是为了保证rosrun命令能够找到相应的功能包,有可以省去这一步骤的方法,各位可以自行查找
source ~/catkin_ws/devel/setup.bash
rosrun learning_communication talker
#打开新终端
cd ~/catkin_ws
source ~/catkin_ws/devel/setup.bash
rosrun learning_communication listener
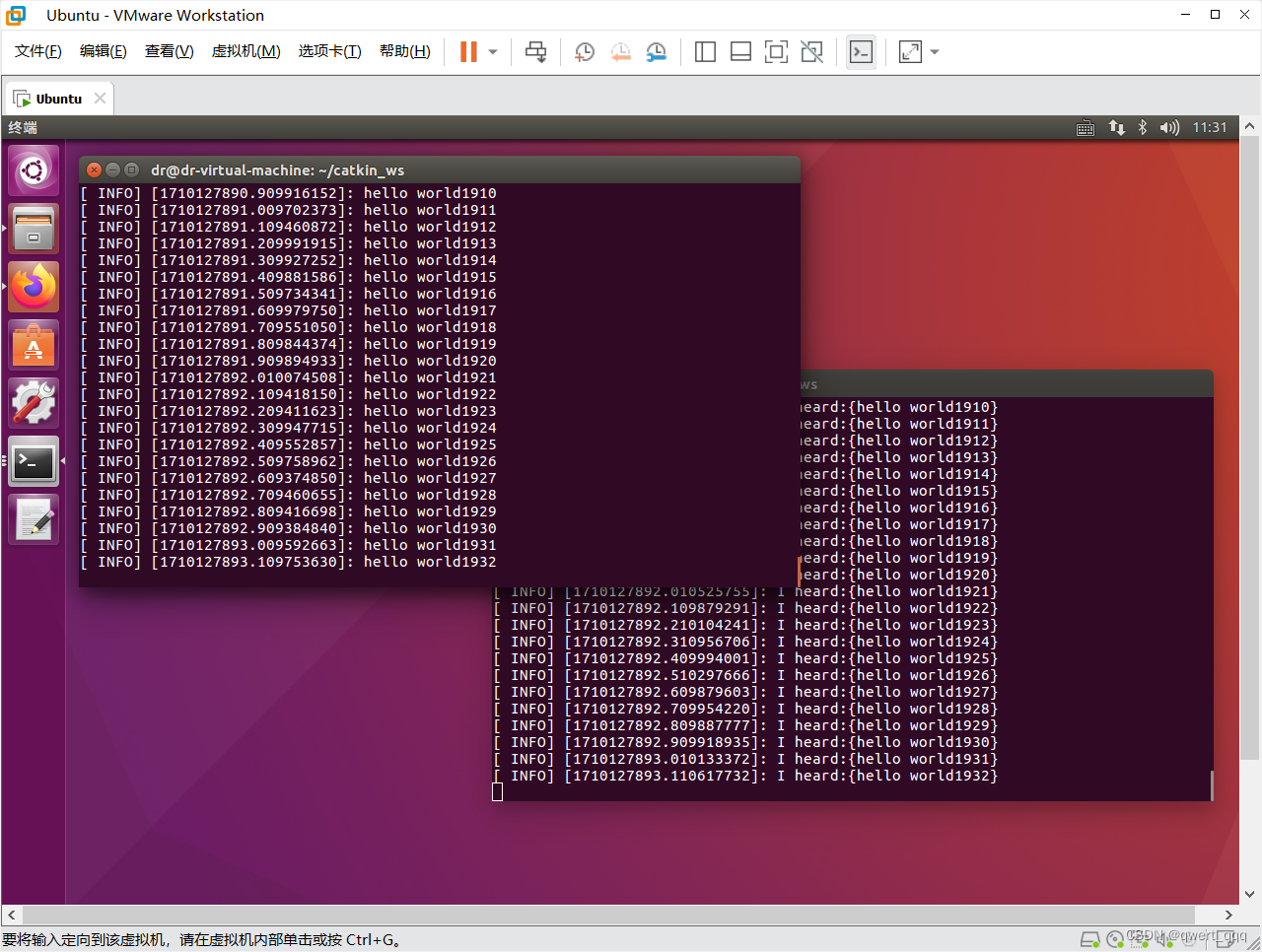
如图,发送了hello world的同时接收了hello world。
二、服务编程
定义服务请求与应答的方式
- 定义srv文件
mkdir ~/catkin_ws/src/learning_communication/srvsudo nano AddTwoInts.srv - AddTwoInts.srv
int64 a int64 b --- int64 sum - 用gedit打开package.xml,在里面添加功能包依赖
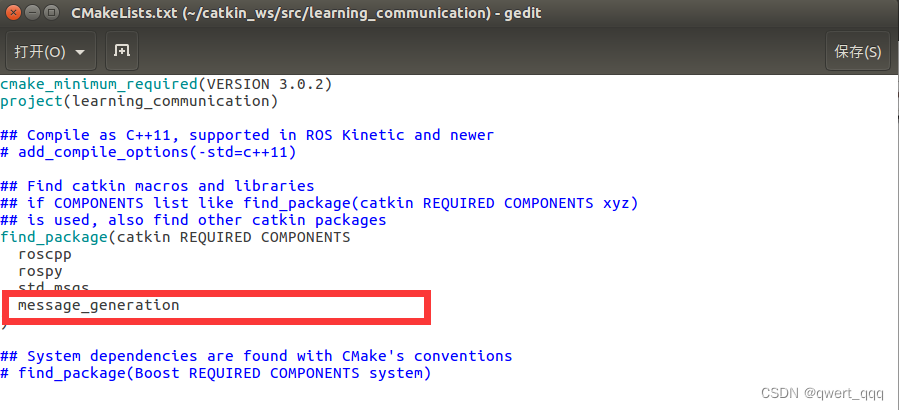
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> - 在CMakeLists.txt添加编译选项

步骤:
- 创建服务器
- 初始化ROS节点
- 创建Serve实例
- 循环等待服务请求,进入回调函数
- 在回调函数中完成服务功能的处理,并反馈应答数据
- 创建客户端
- 初始化ROS节点
- 创建一个Client实例
- 发布服务请求数据
- 等待Serve处理之后的应答结果
- 添加编译选项
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
- 设置依赖
- 运行可执行程序
server.cpp
#include<ros/ros.h>
#include"learning_communication/AddTwoInts.h"
//service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,learning_communication::AddTwoInts::Response &res)
{//将输入的参数中的请求数据相加,结果放到应答变量中res.sum=req.a+req.b;ROS_INFO("request: x=%1d,y=%1d",(long int)req.a,(long int)req.b);ROS_INFO("sending back response:[%1d]",(long int)res.sum);return true;
}
int main(int argc,char **argv)
{//ROS节点初始化ros::init(argc,argv,"add_two_ints_server");//创建节点句柄ros::NodeHandle n;//创建一个名为add_two_ints的server,注册回调函数add()ros::ServiceServer service=n.advertiseService("add_two_ints",add);//循环等待回调函数ROS_INFO("Ready to add two ints.");ros::spin();return 0;
}client.cpp
#include<cstdlib>
#include<ros/ros.h>
#include"learning_communication/AddTwoInts.h"
int main(int argc,char **argv)
{//ROS节点初始化ros::init(argc,argv,"add_two_ints_client");//从终端命令行获取两个加数if(argc!=3){ROS_INFO("usage:add_two_ints_client X Y");return 1;}//创建节点句柄ros::NodeHandle n;//创建一个client,请求add_two_ints_service//service消息类型是learning_communication::AddTwoIntsros::ServiceClient client=n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");//创建learning_communication::AddTwoInts类型的service消息learning_communication::AddTwoInts srv;srv.request.a=atoll(argv[1]);srv.request.b=atoll(argv[2]);//发布service请求,等待加法运算的应答请求if(client.call(srv)){ROS_INFO("sum: %1d",(long int)srv.response.sum);}else{ROS_INFO("Failed to call service add_two_ints");return 1;}return 0;
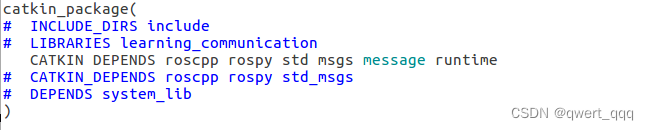
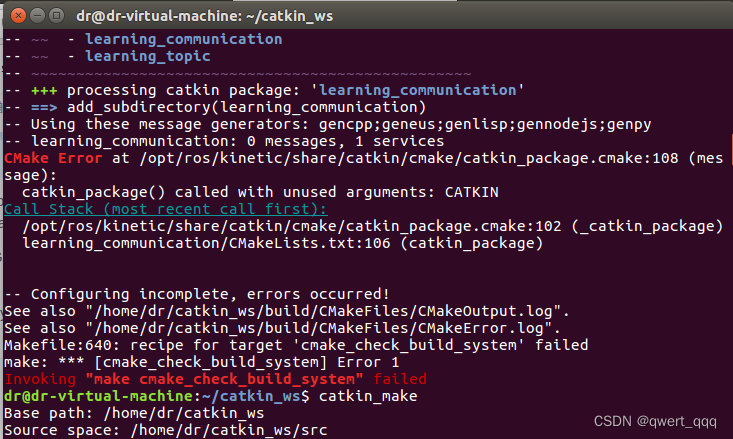
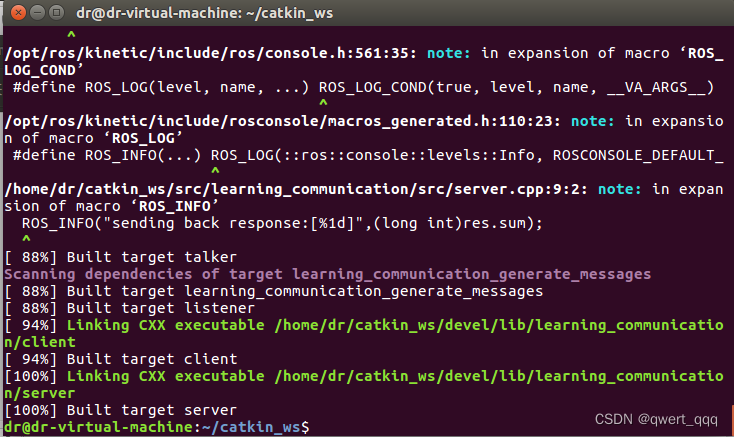
}关于编译时一直出现这样的报错,注意看是不是有些比如这个符号“_”没打。
添加编译设置
编译通过
输入指令
roscore
#打开新终端
source ~/catkin_ws/devel/setup.bash
rosrun learning_communication server
#打开新终端
source ~/catkin_ws/devel/setup.bash
rosrun learning_communication client 11 12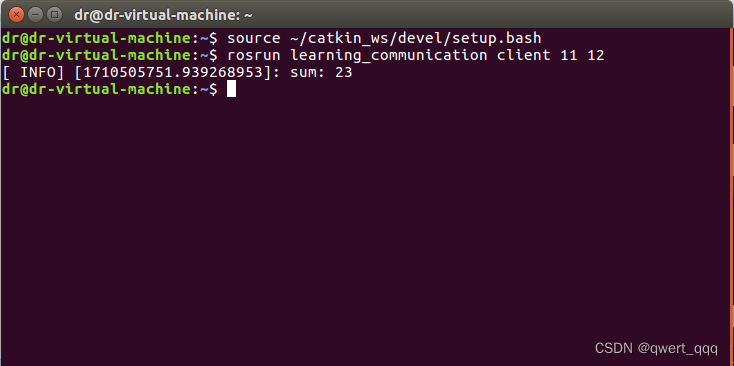
三、动作编程
动作是一种基于ROS消息实现的问答通信机制,它包含连续反馈,可以在任务过程中止运行。
动作(Action)的接口

练习ROS动作编程: 客户端发送一个运动坐标,模拟机器人运动到目标位置的过程。包括服务端和客户端的代码实现,要求带有实时位置反馈。
创建工作区间
#创建功能包
cd catkin_ws/src/
catkin_create_pkg learn_action std_msgs rospy roscpp
#编译功能包
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash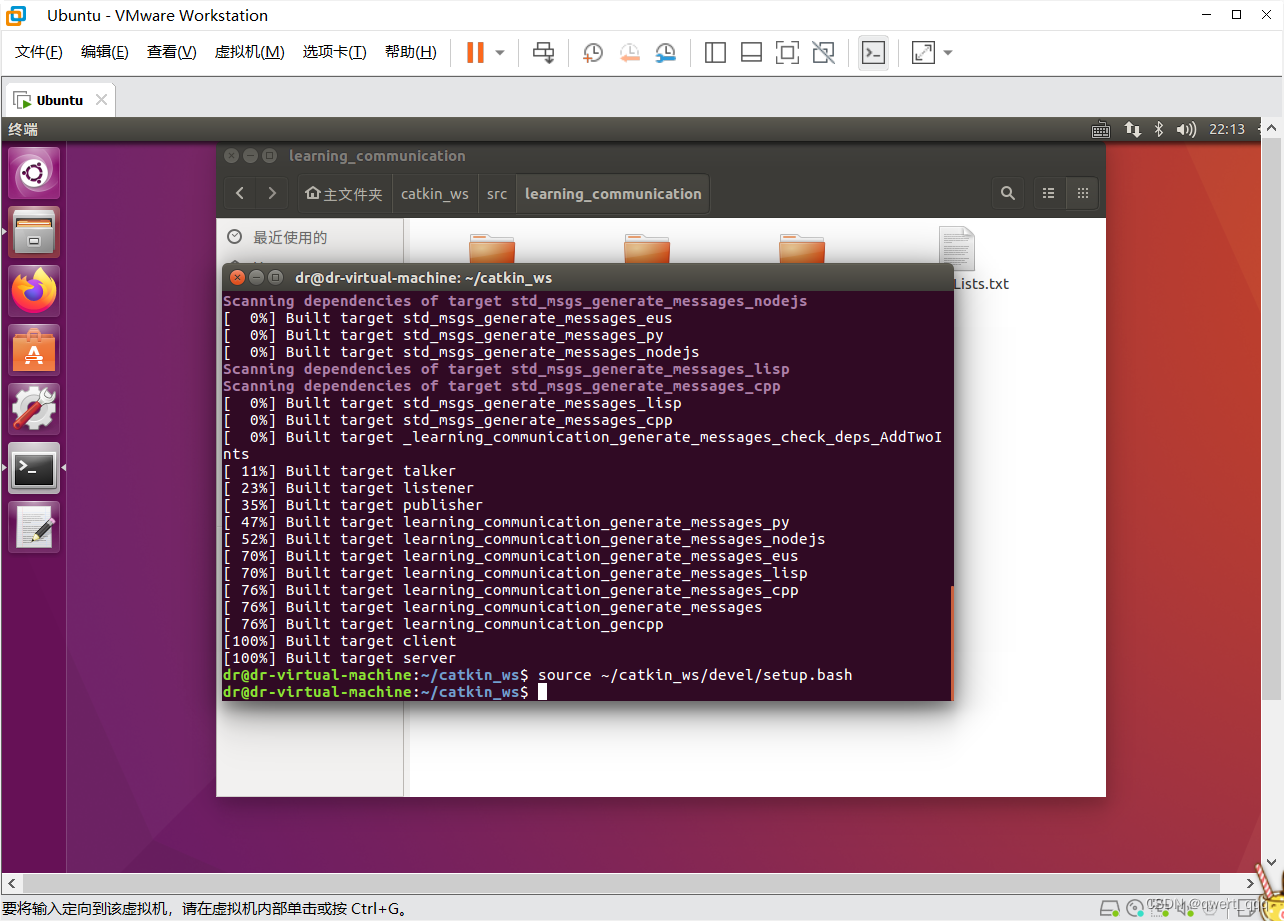
创建action文件夹,并在里面创建TurtleMove.action文件
# Define the goal
float64 turtle_target_x
# Specify Turtle's target position
float64 turtle_target_y
float64 turtle_target_theta
---
# Define the result
float64 turtle_final_x
float64 turtle_final_y
float64 turtle_final_theta
---
# Define a feedback message
float64 present_turtle_x
float64 present_turtle_y
float64 present_turtle_theta在learn_action的src文件夹下,创建TurtleMove_server.cpp文件和TurtleMove_client.cpp文件
TurtleMove_server.cpp
/* 此程序通过通过动作编程实现由client发布一个目标位置 然后控制Turtle运动到目标位置的过程 */
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionServer<learn_action::TurtleMoveAction> Server;
struct Myturtle
{ float x; float y; float theta; }turtle_original_pose,turtle_target_pose; ros::Publisher turtle_vel; void posecallback(const turtlesim::PoseConstPtr& msg) { ROS_INFO("Turtle1_position:(%f,%f,%f)",msg->x,msg->y,msg->theta); turtle_original_pose.x=msg->x; turtle_original_pose.y=msg->y; turtle_original_pose.theta=msg->theta; } // 收到action的goal后调用该回调函数 void execute(const learn_action::TurtleMoveGoalConstPtr& goal, Server* as) { learn_action::TurtleMoveFeedback feedback; ROS_INFO("TurtleMove is working."); turtle_target_pose.x=goal->turtle_target_x; turtle_target_pose.y=goal->turtle_target_y; turtle_target_pose.theta=goal->turtle_target_theta; geometry_msgs::Twist vel_msgs; float break_flag; while(1) { ros::Rate r(10); vel_msgs.angular.z = 4.0 * (atan2(turtle_target_pose.y-turtle_original_pose.y, turtle_target_pose.x-turtle_original_pose.x)-turtle_original_pose.theta); vel_msgs.linear.x = 0.5 * sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) + pow(turtle_target_pose.y-turtle_original_pose.y, 2)); break_flag=sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) + pow(turtle_target_pose.y-turtle_original_pose.y, 2)); turtle_vel.publish(vel_msgs);feedback.present_turtle_x=turtle_original_pose.x; feedback.present_turtle_y=turtle_original_pose.y; feedback.present_turtle_theta=turtle_original_pose.theta; as->publishFeedback(feedback); ROS_INFO("break_flag=%f",break_flag); if(break_flag<0.1) break; r.sleep(); } // 当action完成后,向客户端返回结果 ROS_INFO("TurtleMove is finished."); as->setSucceeded();
}
int main(int argc, char** argv)
{ ros::init(argc, argv, "TurtleMove_server"); ros::NodeHandle n,turtle_node; ros::Subscriber sub =turtle_node.subscribe("turtle1/pose",10,&posecallback);//订阅小乌龟的位置信息 turtle_vel = turtle_node.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);//发布控制小乌龟运动的速度 // 定义一个服务器 Server server(n, "TurtleMove", boost::bind(&execute, _1, &server), false); // 服务器开始运行 server.start(); ROS_INFO("server has started."); ros::spin(); return 0;
}
TurtleMove_client.cpp
#include <actionlib/client/simple_action_client.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionClient<learn_action::TurtleMoveAction> Client;
struct Myturtle
{ float x; float y; float theta;
}turtle_present_pose;
// 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state, const learn_action::TurtleMoveResultConstPtr& result)
{ ROS_INFO("Yay! The TurtleMove is finished!"); ros::shutdown();
}
// 当action激活后会调用该回调函数一次
void activeCb()
{ ROS_INFO("Goal just went active");
}
// 收到feedback后调用该回调函数
void feedbackCb(const learn_action::TurtleMoveFeedbackConstPtr& feedback)
{ ROS_INFO(" present_pose : %f %f %f", feedback->present_turtle_x, feedback->present_turtle_y,feedback->present_turtle_theta);
}
int main(int argc, char** argv)
{ ros::init(argc, argv, "TurtleMove_client"); // 定义一个客户端 Client client("TurtleMove", true); // 等待服务器端 ROS_INFO("Waiting for action server to start."); client.waitForServer(); ROS_INFO("Action server started, sending goal."); // 创建一个action的goal learn_action::TurtleMoveGoal goal; goal.turtle_target_x = 1; goal.turtle_target_y = 1; goal.turtle_target_theta = 0; // 发送action的goal给服务器端,并且设置回调函数 client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return 0;
}
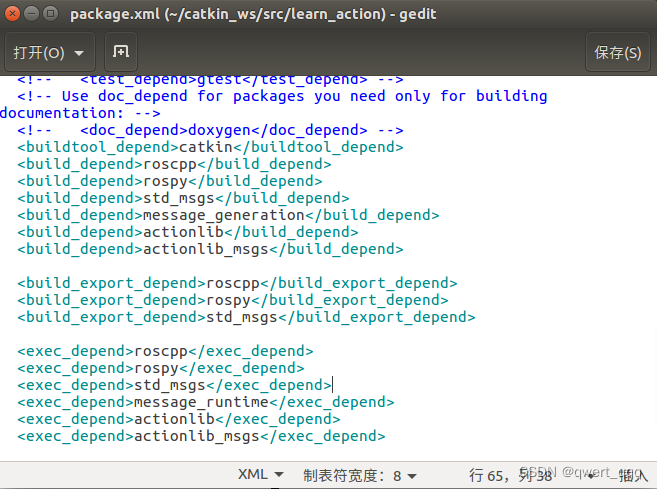
在package.xml里面添加依赖
<build_depend>message_generation</build_depend>
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
添加完就是这样
修改learn_action里面的CMakeLists.txt,添加代码
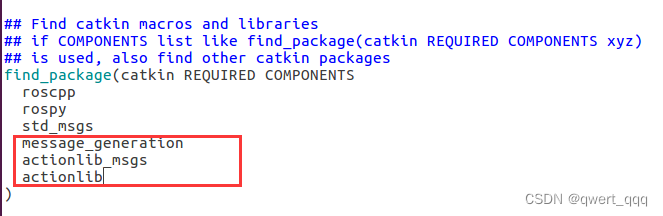
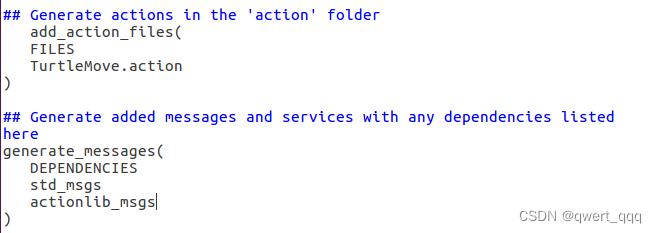

添加编译选项
add_executable(TurtleMove_client src/TurtleMove_client.cpp)
target_link_libraries(TurtleMove_client ${catkin_LIBRARIES})
add_dependencies(TurtleMove_client ${PROJECT_NAME}_gencpp) add_executable(TurtleMove_server src/TurtleMove_server.cpp)
target_link_libraries(TurtleMove_server ${catkin_LIBRARIES})
add_dependencies(TurtleMove_server ${PROJECT_NAME}_gencpp) 编译
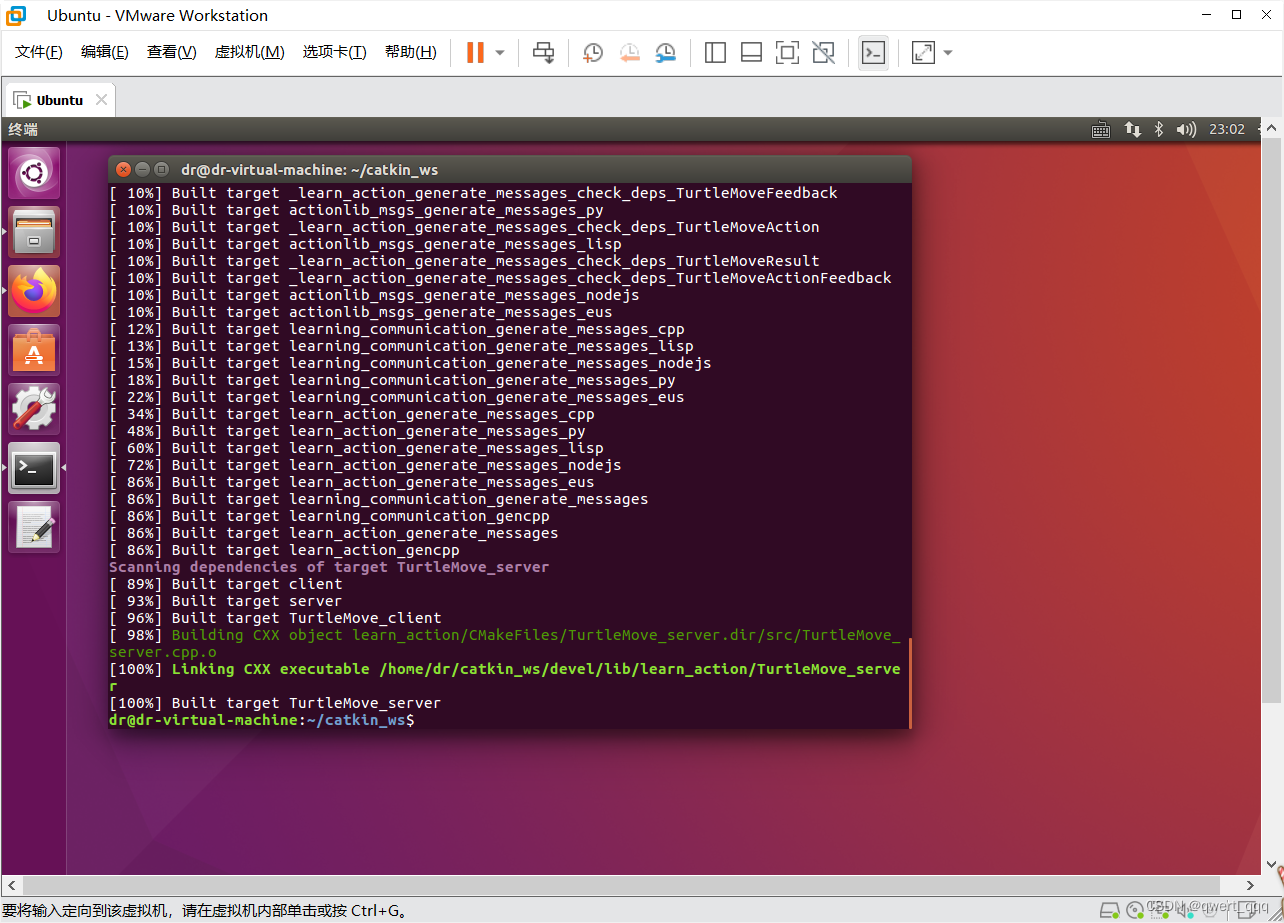
roscore
#开一个新终端窗口
source ./devel/setup.bash
rosrun turtlesim turtlesim.node
#新终端
source ./devel/setup.bash
rosrun learn_action TurtleMove_server
#新终端
source ./devel/setup.bash
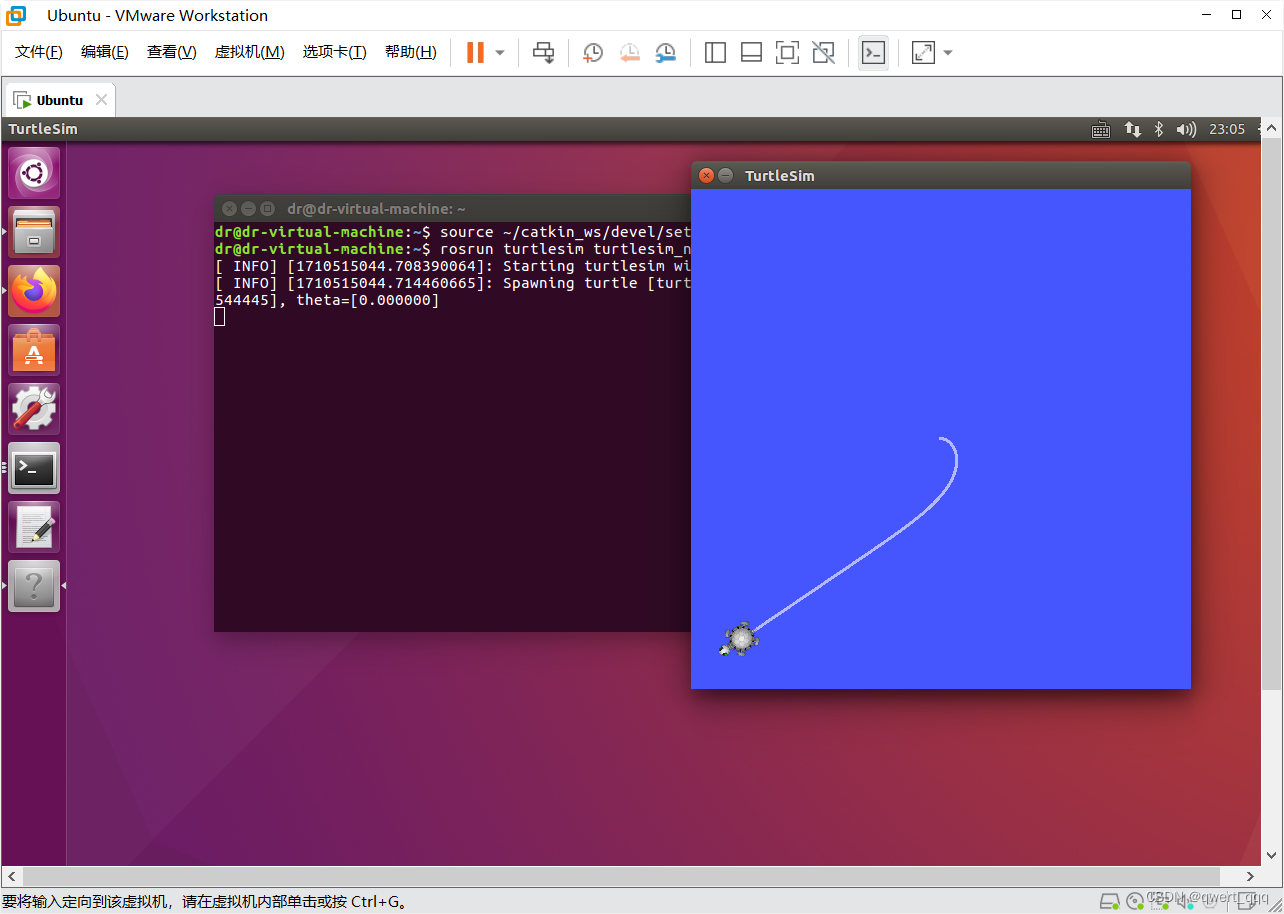
rosrun learn_action TurtleMove_client运行结果如下
相关文章:
ROS Kinetic通信编程:话题、服务、动作编程
文章目录 一、话题编程二、服务编程三、动作编程 接上篇,继续学习ROS通信编程基础 一、话题编程 步骤: 创建发布者 初始化ROS节点向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型按照一定频率循环发布消息 创建订阅者 初始化…...
还原wps纯粹的编辑功能
1.关闭稻壳模板: 1.1. 启动wps(注意不要乱击稻壳模板,点了就找不到右键菜单了) 1.2. 在稻壳模板选项卡右击:选不再默认展示 2.关闭托盘中wps云盘图标:右击云盘图标/同步与设置: 2.1.关闭云文档同步 2.2.窗口选桌面应用…...

【烹饪】清炒菠菜的学习笔记
1 焯水:15s左右即可 Kimi教授 菠菜含有草酸,与含钙丰富的食物共煮时可能会形成草酸钙,影响钙的吸收,因此在烹饪时通常建议先用开水烫一下菠菜以减少草酸含量。 2 可选调料:鸡精...

AcWing 4964.子矩阵
首先就是运用了暴力的思路,能够过个70%的数据,剩下的直接时间超时了,没办法优化了。 讲一下暴力的思路: 其实就是模拟而已,也就是看作想要找的矩阵为一个小窗口,然后不断移动的事而已。 #include<ios…...
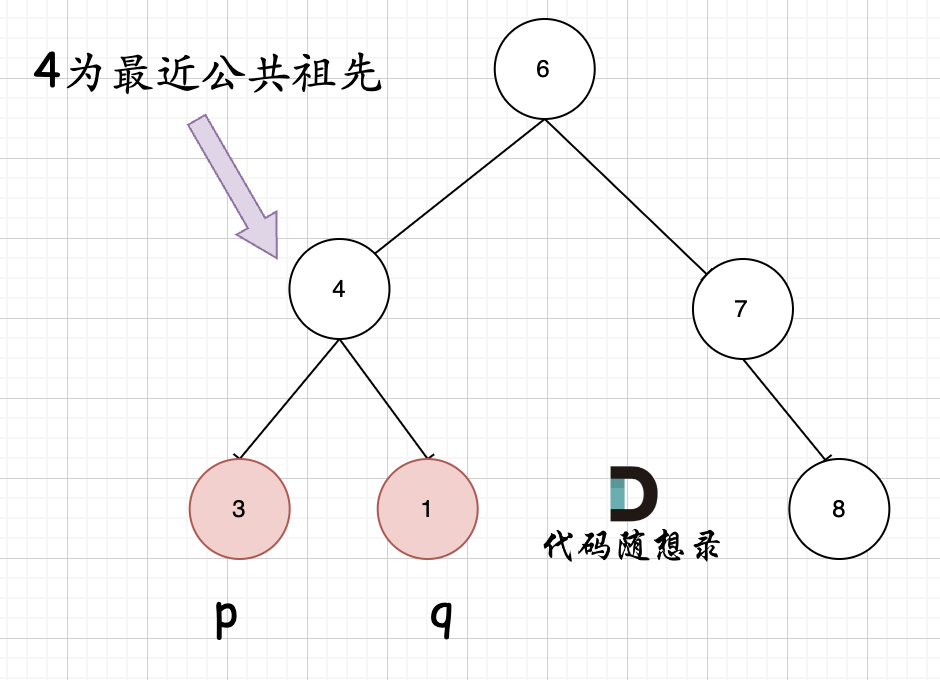
代码随想录算法训练营第day20|530.二叉搜索树的最小绝对差 、 501.二叉搜索树中的众数 、236. 二叉树的最近公共祖先
530.二叉搜索树的最小绝对差 力扣题目链接 (opens new window) 给你一棵所有节点为非负值的二叉搜索树,请你计算树中任意两节点的差的绝对值的最小值。 示例: 提示:树中至少有 2 个节点。 二叉搜索树是一颗有序的树,可以通过中…...
)
Hystrix的原理及应用:构建微服务容错体系的利器(二)
本系列文章简介: 本系列文章旨在深入剖析Hystrix的原理及应用,帮助大家理解其如何在微服务容错体系中发挥关键作用。我们将从Hystrix的核心原理出发,探讨其隔离、熔断、降级等机制的实现原理;接着,我们将结合实际应用场…...

【nuget】如何移动 nuget 缓存文件夹
如何移动 nuget 缓存文件夹 一、了解NuGet包的默认存放路径二、为什么需要修改NuGet包的默认存放路径?使用下面的命令查看本地包位置三、更改下载的NuGet包存储位置四、修改VS离线包引用地址五、验证修改的新路径是否成功默认情况下,NuGet下载的包存放在系统盘(C盘中),这样一…...

H266开源视频编码器VVENC现状
VVenC 是由 Fraunhofer HHI 研究团队开发的,主要是视频编码系统组。HHI 是欧洲最大的研究组织 Fraunhofer 协会的成员,该协会是德国的一个大型非营利性组织。源代码在: https://github.com/fraunhoferhhi/vvenc VVenC几乎与H.266视频标准同时…...

unity webgl怎么获取当前页面网址
在Unity WebGL中,你可以使用Javascript和C#的互操作性来获取当前页面的网址。以下是如何实现的步骤和示例代码: 首先,你需要创建一个Javascript脚本来获取当前页面的网址。(简单方法为:创建xxx.txt,修改文件…...

深度学习神经网络训练环境配置以及演示
🎬个人简介:一个全栈工程师的升级之路! 📋个人专栏:高性能(HPC)开发基础教程 🎀CSDN主页 发狂的小花 🌄人生秘诀:学习的本质就是极致重复! 目录 1 NVIDIA Dr…...

[嵌入式AI从0开始到入土]16_ffmpeg_ascend编译安装及性能测试
[嵌入式AI从0开始到入土]嵌入式AI系列教程 注:等我摸完鱼再把链接补上 可以关注我的B站号工具人呵呵的个人空间,后期会考虑出视频教程,务必催更,以防我变身鸽王。 第1期 昇腾Altas 200 DK上手 第2期 下载昇腾案例并运行 第3期 官…...
HTML5:七天学会基础动画网页11
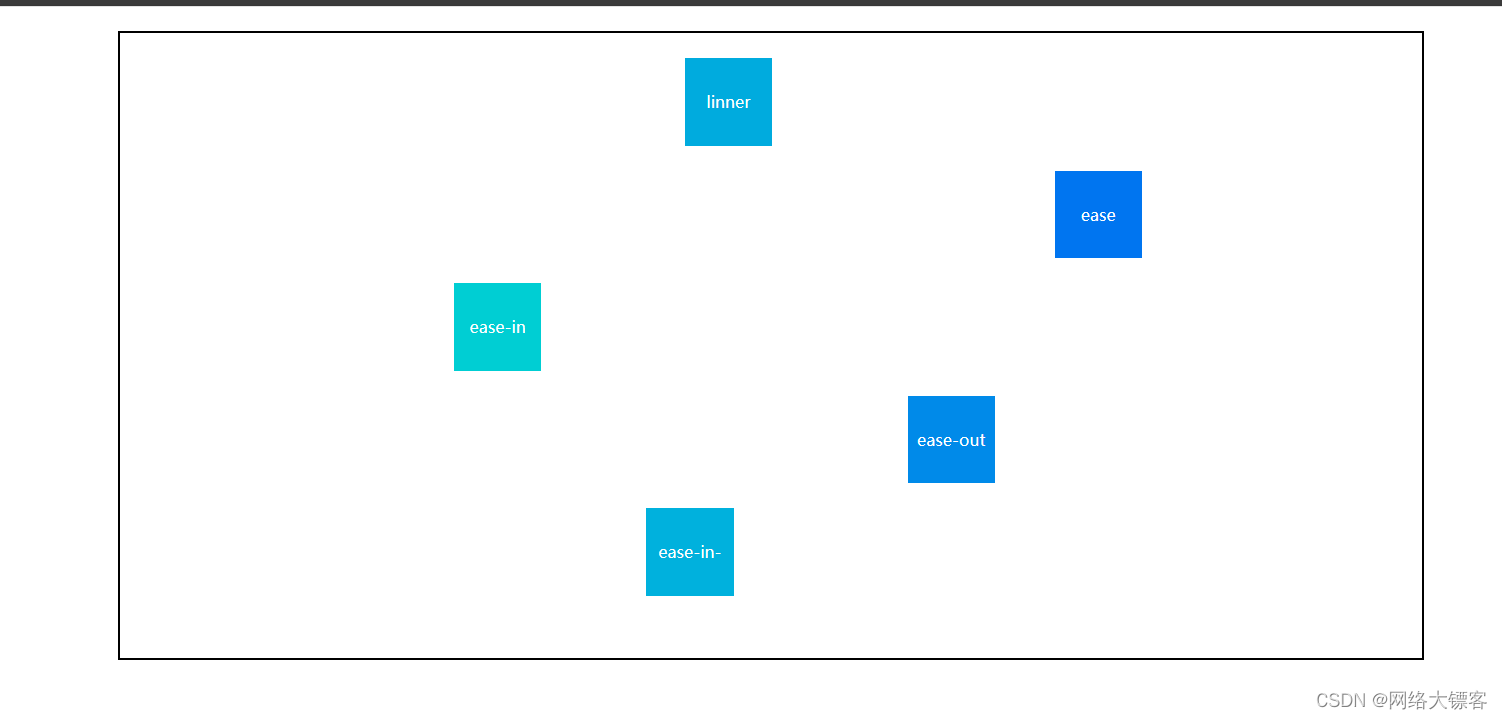
CSS3动画 CSS3过渡的基本用法: CSS3过渡是元素从一种样式逐渐改变为另一种样式的效果。 过渡属性-transition 值与说明 transition-property 必需,指定CSS属性的name,transition效果即哪个属性发生过渡。 transition-duration 必需,t…...
考虑开发容器的 6 个理由
虽然在容器环境内进行开发的行为可以追溯到 2010 年代中期,但开发容器本身在过去一年中已经开始流行。微软在 2022 年推出了开发容器规范,推动了这一概念的发展,而 Docker 在去年夏天也紧随其后,推出了开发环境功能的测试版。 开…...

Python基础入门 --- 1-2.字面量
文章目录 Python基础入门第一章:1.1 第一个python程序 第二章 :2.1 字面量2.2 常用的值类型2.3 字符串2.3.1 三种定义方式2.3.2 引号嵌套2.3.3 字符串拼接2.3.4 字符串格式化2.3.5 格式化的精度控制数字精度控制: 2.3.6 字符串格式化方式22.3…...

华为云计算hcie认证考什么?华为hciie认证好考吗
1.理论知识:HCIE认证首先要求考生具备扎实的云计算理论基础,包括云计算的基本概念、架构、关键技术、安全管理等方面的知识。考生需要深入理解云计算的核心原理,以及华为云计算产品的特点和优势。 2.实践技能:除了理论知识外&…...

redis spring cache
数据库的数据是存储在硬盘上的,频繁访问性能较低。如果将一些需要频繁查询的热数据放到内存的缓存中,可以大大减轻数据库的访问压力。 SpringCache SpringCache提供基本的Cache抽象,并没有具体的缓存能力,需要配合具体的缓存实现…...
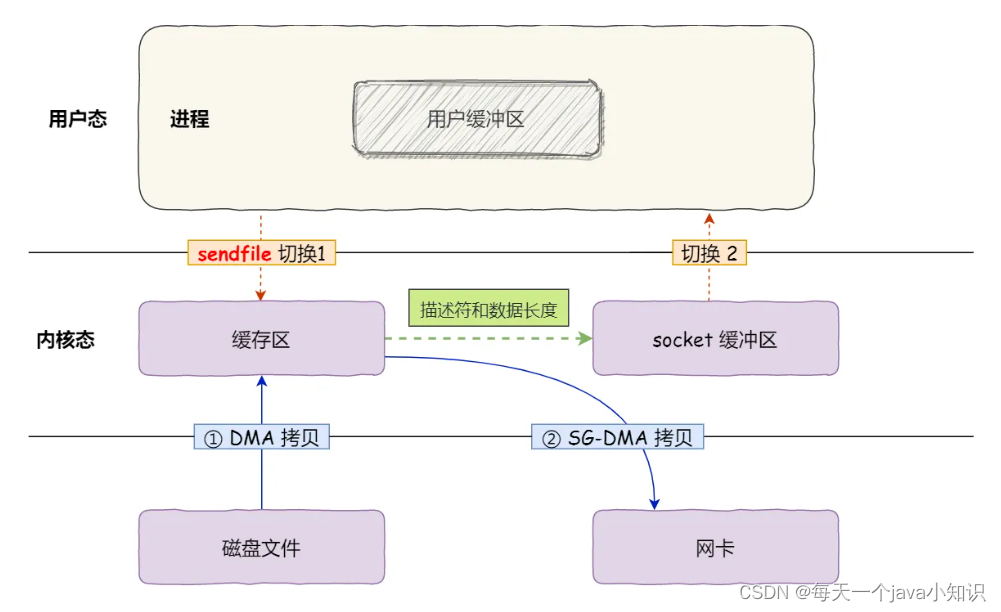
图解I/O中的零拷贝技术
什么是零拷贝? 零拷贝是一种计算机系统中的 I/O 优化技术,它的核心思想是在数据传输过程中尽可能地减少或完全避免 CPU 将数据从一个存储区域复制到另一个存储区域的操作,从而减少了上下文切换和 CPU 拷贝时间,提高了系统的性能和…...
)
【设计模式】Java 设计模式之桥接模式(Bridge)
桥接模式(Bridge Pattern)是结构型设计模式的一种,它主要解决的是抽象部分与实现部分的解耦问题,使得两者可以独立变化。这种类型的设计模式属于结构型模式,因为该模式涉及如何组合接口和它们的实现。将抽象部分与实现…...
记录dockers中Ubuntu安装python3.11
参考: docker-ubuntu 安装python3.8,pip3_dockerfile ubuntu22 python3.8-CSDN博客...
【算法专题--双指针算法】leetcode--283. 移动零、leetcode--1089. 复写零
🍁你好,我是 RO-BERRY 📗 致力于C、C、数据结构、TCP/IP、数据库等等一系列知识 🎄感谢你的陪伴与支持 ,故事既有了开头,就要画上一个完美的句号,让我们一起加油 目录 前言1. 移动零࿰…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...

Python基础语法:访问器@property和修改器@xxx.setter
一、简介 访问器和修改器也是装饰器的一种。 property: 访问器,getter xxx.setter: 修改器,setter 访问器和修改器的根本目的是想将属性私有化,提供getter&setter去访问。 访问器和修改器能够做到访问属性其实在调用getter方法࿰…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

D3KeyHelper:暗黑3玩家的智能按键助手,告别重复操作疲劳
D3KeyHelper:暗黑3玩家的智能按键助手,告别重复操作疲劳 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 你是否曾在《暗黑破坏…...
)
ThinkPad开机报错0183/0253?别慌,手把手教你搞定EFI变量错误(附BIOS重置教程)
ThinkPad开机报错0183/0253?EFI变量错误全面解决方案当你按下ThinkPad的电源键,期待熟悉的开机画面时,屏幕上却突然跳出一串神秘代码——"0183: Bad CRC of Security Settings in EFI Variable"或"0253: EFI Variable Block D…...

如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南
如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南 【免费下载链接】UAssetGUI A tool designed for low-level examination and modification of Unreal Engine game assets by hand. 项目地址: https://gitcode.com/gh_mirrors/ua/UAssetGUI UAss…...
)
别再只测accuracy!DeepSeek集成测试必须监控的5个隐性指标(P99首token延迟、context bleed率、tool-call schema漂移)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试的核心范式演进 DeepSeek大模型的工程化落地对集成测试提出了全新挑战:传统基于接口响应码与字段校验的测试范式已难以覆盖语义一致性、推理链鲁棒性、上下文敏感度等高阶质…...

PentestGPT实战部署指南:AI驱动的渗透测试工作流落地
1. 这不是另一个“AI安全”的概念玩具,而是一套能真正跑起来的渗透测试辅助工作流“PentestGPT”这个名字刚在GitHub上出现时,我第一反应是点开又关掉——过去三年里,我见过太多打着“AI渗透”旗号的项目:有的只是把ChatGPT API封…...

搞定这 5 个全栈电商项目,面试别再用 Todo-List 凑数了
找独立开发练手项目或者写简历项目时,最忌讳两件事:一是太简单(纯前端 Mock 数据,点两下就没了),二是太假(一上来就硬套微服务、消息队列、高并发,结果自己根本Hold不住)…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...