SA3D:基于 NeRF 的三维场景分割方法
Paper: Cen J, Zhou Z, Fang J, et al. Segment anything in 3d with nerfs[J]. Advances in Neural Information Processing Systems, 2024, 36.
Introduction: https://jumpat.github.io/SA3D/
Code: https://github.com/Jumpat/SegmentAnythingin3D
SA3D 是一种用于 NeRF 表示的三维场景的分割技术,只需要用户在单一视角的图像上给出粗略的分割点作为 prompt,就可以在三维场景中分割出相应物体,以体素的形式表示。

目录
- 一. 研究思路
- 二. mask 逆向渲染
- 三. 跨视角自动 prompt
- 四. 实验
- 五. 总结
一. 研究思路
SA3D 根据用户在单一视图上给出的 prompt,使用 SAM 提取 mask 以筛选场景中的体素,从而分割出场景中的三维目标物体。分割三维场景元素的过程如下:在不同视角之间交替进行 mask 逆向渲染 和 跨视角自动 prompt,迭代地完成基于体素网格构建的 3D mask:
- mask 逆向渲染 (mask inverse rendering):将当前视角 SAM 分割的 2D mask 逆向投影到三维空间,以获取 3D mask;
- 跨视角自动 prompt (cross-view self-prompting):在其他视角下自动提取 prompt 点传入 SAM 提取 2D mask;

记 NeRF 初始渲染的图像为 I in \mathbf{I}^{\text {in}} Iin,用户输入的 prompt 点集为 P in \mathcal{P}^{\text {in}} Pin,SAM 根据 prompt 点集分割的 2D mask 为 M SAM in \mathbf{M}_{\text {SAM }}^{\text {in}} MSAM in。先通过 mask 逆向渲染机制将 M SAM in \mathbf{M}_{\text {SAM}}^{\text {in}} MSAMin 投影到三维空间得到 3D mask V \mathbf{V} V,再将 3D mask 投影到二维空间中新的视角得到粗略的 2D mask M ( n ) \mathbf{M}^{(n)} M(n),然后通过跨视角自动 prompt 机制从 M ( n ) \mathbf{M}^{(n)} M(n) 中继续提取 prompt 点 P ( n ) \mathcal{P}^{(n)} P(n),最后使用 SAM 根据 P ( n ) \mathcal{P}^{(n)} P(n) 分割出更加精确的 2D mask M SAM ( n ) \mathbf{M}_{\text {SAM}}^{(n)} MSAM(n)。重复上面的操作,直到获得完整的 3D mask。
二. mask 逆向渲染
因为 SA3D 的分割结果是用体素 V ∈ R L × W × H \mathbf{V} \in \mathbb{R}^{L \times W \times H} V∈RL×W×H 表示的, L × W × H L \times W \times H L×W×H 表示三维场景的长宽高,所以 mask 逆向渲染就是在三维空间中找到对应的 3D mask。每个体素有一个置信度分数 (soft mask confidence score),表示属于 3D mask 的概率,初始化时将所有体素的置信度置零,体素 r ( t ) \mathbf{r}(t) r(t) 的置信度用 V ( r ( t ) ) \mathbf{V}(\mathbf{r}(t)) V(r(t)) 表示。
3D mask 向二维空间投影时,2D mask M \mathbf{M} M 的置信度为:
M ( r ) = ∫ t n t f ω ( r ( t ) ) V ( r ( t ) ) d t \mathbf{M}(\mathbf{r})=\int_{t_n}^{t_f} \omega(\mathbf{r}(t)) \mathbf{V}(\mathbf{r}(t)) \mathrm{dt} M(r)=∫tntfω(r(t))V(r(t))dt
将 M ( r ) \mathbf{M}(\mathbf{r}) M(r) 和 SAM 分割得到的真实 mask M SAM ( n ) \mathbf{M}_{\text {SAM}}^{(n)} MSAM(n) 计算损失来优化 3D mask 的置信度:
L proj = − ∑ r ∈ R ( I ) M S A M ( r ) ⋅ M ( r ) \mathcal{L}_{\text {proj }}=-\sum_{\mathbf{r} \in \mathcal{R}(\mathbf{I})} \mathbf{M}_{\mathrm{SAM}}(\mathbf{r}) \cdot \mathbf{M}(\mathbf{r}) Lproj =−r∈R(I)∑MSAM(r)⋅M(r)
由于初始阶段 mask 存在较大误差,因此在损失函数中增加一个负的细化项,根据多视图 mask 一致性来优化 3D mask:
L proj = − ∑ r ∈ R ( I ) M S A M ( r ) ⋅ M ( r ) + λ ∑ r ∈ R ( I ) ( 1 − M S A M ( r ) ) ⋅ M ( r ) \mathcal{L}_{\text {proj }}=-\sum_{\mathbf{r} \in \mathcal{R}(\mathbf{I})} \mathbf{M}_{\mathrm{SAM}}(\mathbf{r}) \cdot \mathbf{M}(\mathbf{r})+\lambda \sum_{\mathbf{r} \in \mathcal{R}(\mathbf{I})}\left(1-\mathbf{M}_{\mathrm{SAM}}(\mathbf{r})\right) \cdot \mathbf{M}(\mathbf{r}) Lproj =−r∈R(I)∑MSAM(r)⋅M(r)+λr∈R(I)∑(1−MSAM(r))⋅M(r)
三. 跨视角自动 prompt
跨视角自动 prompt 就是要在不同视角上自动采样 prompt 点,从而提供更多的 2D mask 来优化 3D mask。对于每个视角,3D mask 投影到该平面得到粗略的 2D mask M ( n ) \mathbf{M}^{(n)} M(n),使用 Self-prompting 方法从 M ( n ) \mathbf{M}^{(n)} M(n) 中提取一组 prompt 点 P s ( n ) \mathcal{P}_{s}^{(n)} Ps(n)。这里的 M ( n ) \mathbf{M}^{(n)} M(n) 并不是二位图,而是该像素的置信度,下面使用像素 p \mathbf{p} p 阐述 Self-prompting 的过程。
P s ( n ) \mathcal{P}_{s}^{(n)} Ps(n) 初始化为空集,第一个点 p 0 \mathbf{p}_0 p0 选择具有最高置信度分数的点,即 p 0 = a r g m a x P M ( n ) ( p ) \mathbf{p}_0=\mathrm{arg max}_\mathbf{P} \mathbf{M}^{(n)}(\mathbf{p}) p0=argmaxPM(n)(p)。后续新增的 prompt 点需要同时满足与现有 prompt 点靠近和具有较高的置信度分数,因此引入了一个衰减项来调整每个像素的置信度分数:
Δ M ( n ) ( p ) = min { M ( n ) ( p ^ ) ⋅ d ( G ( p ) , G ( p ^ ) ) ∣ p ^ ∈ P s } \Delta \mathbf{M}^{(n)}(\mathbf{p})=\min \left\{\mathbf{M}^{(n)}(\hat{\mathbf{p}}) \cdot d(\mathcal{G}(\mathbf{p}), \mathcal{G}(\hat{\mathbf{p}})) \mid \hat{\mathbf{p}} \in \mathcal{P}_s\right\} ΔM(n)(p)=min{M(n)(p^)⋅d(G(p),G(p^))∣p^∈Ps}
其中 d ( ⋅ , ⋅ ) d(·,·) d(⋅,⋅) 表示 min-max normalized Euclidean distance。计算现有 prompt 点周围点衰减后的置信度分数,选择最高的加入 P s ( n ) \mathcal{P}_{s}^{(n)} Ps(n):
M ~ ( n ) ( p ) = M ( n ) ( p ) − Δ M ( n ) ( p ) \tilde{\mathbf{M}}^{(n)}(\mathbf{p})=\mathbf{M}^{(n)}(\mathbf{p})-\Delta \mathbf{M}^{(n)}(\mathbf{p}) M~(n)(p)=M(n)(p)−ΔM(n)(p)
四. 实验

五. 总结
因为三维场景是由 NeRF 隐式表达的,所以 SA3D 在表示分割出的物体时需要引入新的表达 —— 体素。SA3D 的思路和 SAM3D 1 相似,通过不同视角之间交替进行 mask 逆向渲染和跨视角 Self-prompting,迭代地完成基于体素网格构建的 3D mask。由于是 NeRF 的隐式表达,SA3D 在优化时需要一定时间,从几十秒到几分钟不等,难以做到实时的分割。2
Yang Y, Wu X, He T, et al. Sam3d: Segment anything in 3d scenes[J]. arXiv preprint arXiv:2306.03908, 2023. ↩︎
Segment Anything Model 在 3D 视觉方向上有哪些应用? ↩︎
相关文章:
SA3D:基于 NeRF 的三维场景分割方法
Paper: Cen J, Zhou Z, Fang J, et al. Segment anything in 3d with nerfs[J]. Advances in Neural Information Processing Systems, 2024, 36. Introduction: https://jumpat.github.io/SA3D/ Code: https://github.com/Jumpat/SegmentAnythingin3D SA3D 是一种用于 NeRF 表…...
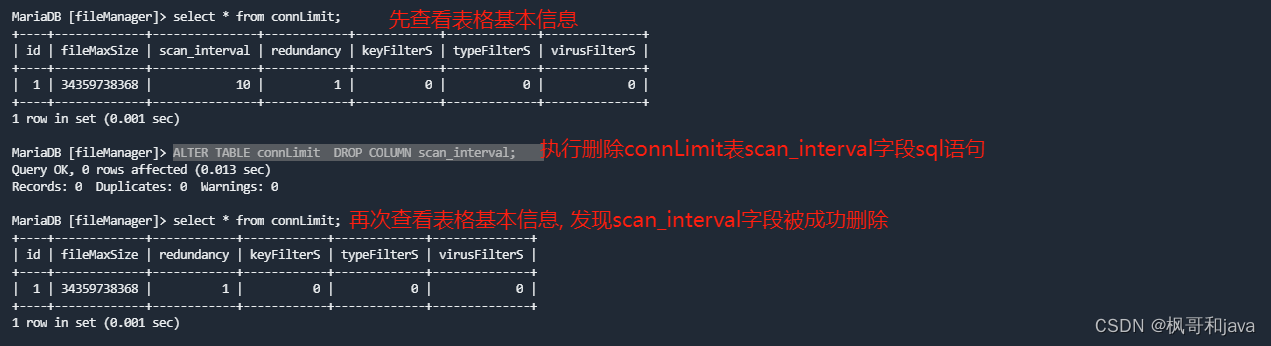
mysql实战开发之 mysql 删除一张表某个字段的sql语句
有一张表, 我需要删除这张表其中的某一个或者某几个字段, 相信大家在日常开发中应该会遇到这种情况, 然后刚好自己接触的项目安装的mysql关闭了允许远程连接的设置, 也就是说不允许使用类似于navicat 等可视化工具连接, 那么就没办法通过可视化工具直接去通过鼠标操作就可以 完…...
Selenium控制已运行的Edge和Chrome浏览器——在线控制 | 人机交互(详细启动步骤和bug记录)
文章目录 前期准备1. 浏览器开启远程控制指令(1)Edge(2)Chrome 2. 执行python代码(1)先启动浏览器后执行代码(2)通过代码启动浏览器(3)Bug问题记录1ÿ…...

【Miniconda】Linux系统中 .condarc 配置文件的位置一般在哪里
【Miniconda】Linux系统中 .condarc 配置文件的位置一般在哪里 🌈 个人主页:高斯小哥 🔥 高质量专栏:Matplotlib之旅:零基础精通数据可视化、Python基础【高质量合集】、PyTorch零基础入门教程👈 希望得到…...
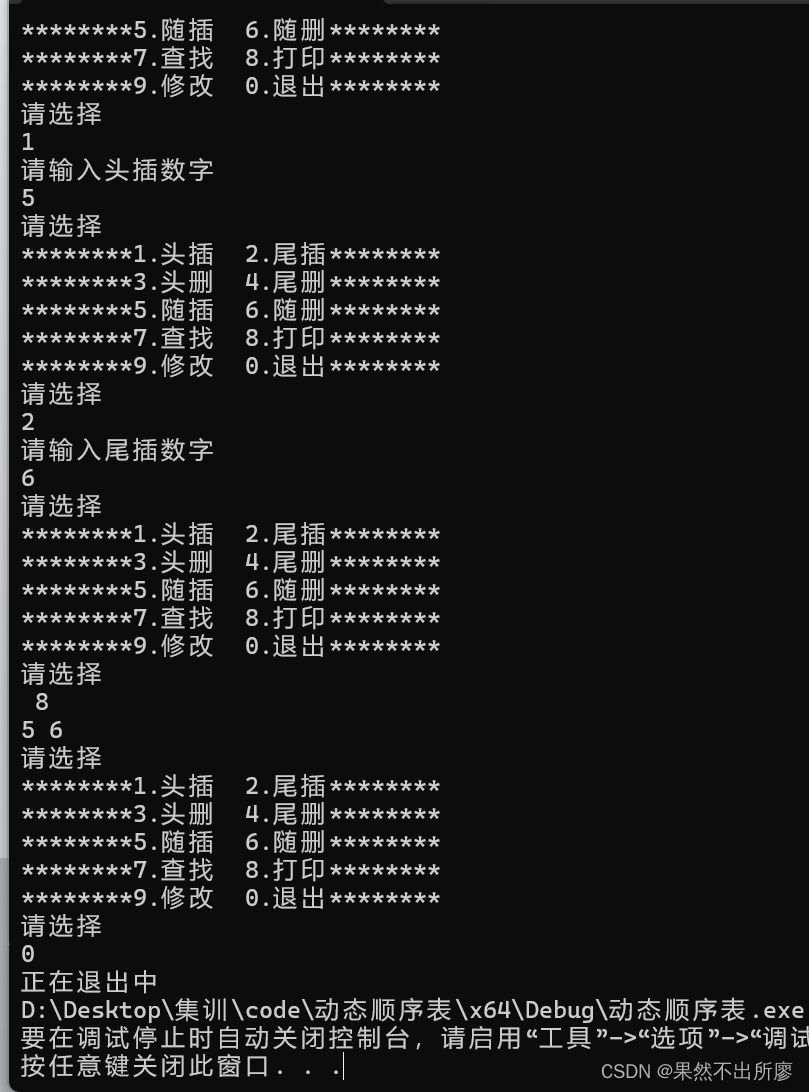
数据结构——动态顺序表
数据结构的动态顺序表有以下几个操作:创建,销毁,初始化,增删查改和打印以及内存空间不够时的扩容 本文的宏定义: #define SeqTypeData int 1.动态顺序表的创建 typedef struct SeqListInit{//动态顺序表的创建SeqT…...

Android Studio实现内容丰富的安卓宠物医院管理系统
获取源码请点击文章末尾QQ名片联系,源码不免费,尊重创作,尊重劳动 项目编号128 1.开发环境android stuido jdk1.8 eclipse mysql tomcat 2.功能介绍 安卓端: 1.注册登录 2.系统公告 3.宠物社区(可发布宠物帖子…...
)
华为OD机试真题-启动多任务排序-2024年OD统一考试(C卷)
题目描述: 一个应用启动时,会有多个初始化任务需要执行,并且任务之间有依赖关系,例如A任务依赖B任务,那么必须在B任务执行完成之后,才能开始执行A任务。 现在给出多条任务依赖关系的规则,请输入任务的顺序执行序列,规则采用贪婪策略,即一个任务如果没有依赖的任务,则…...
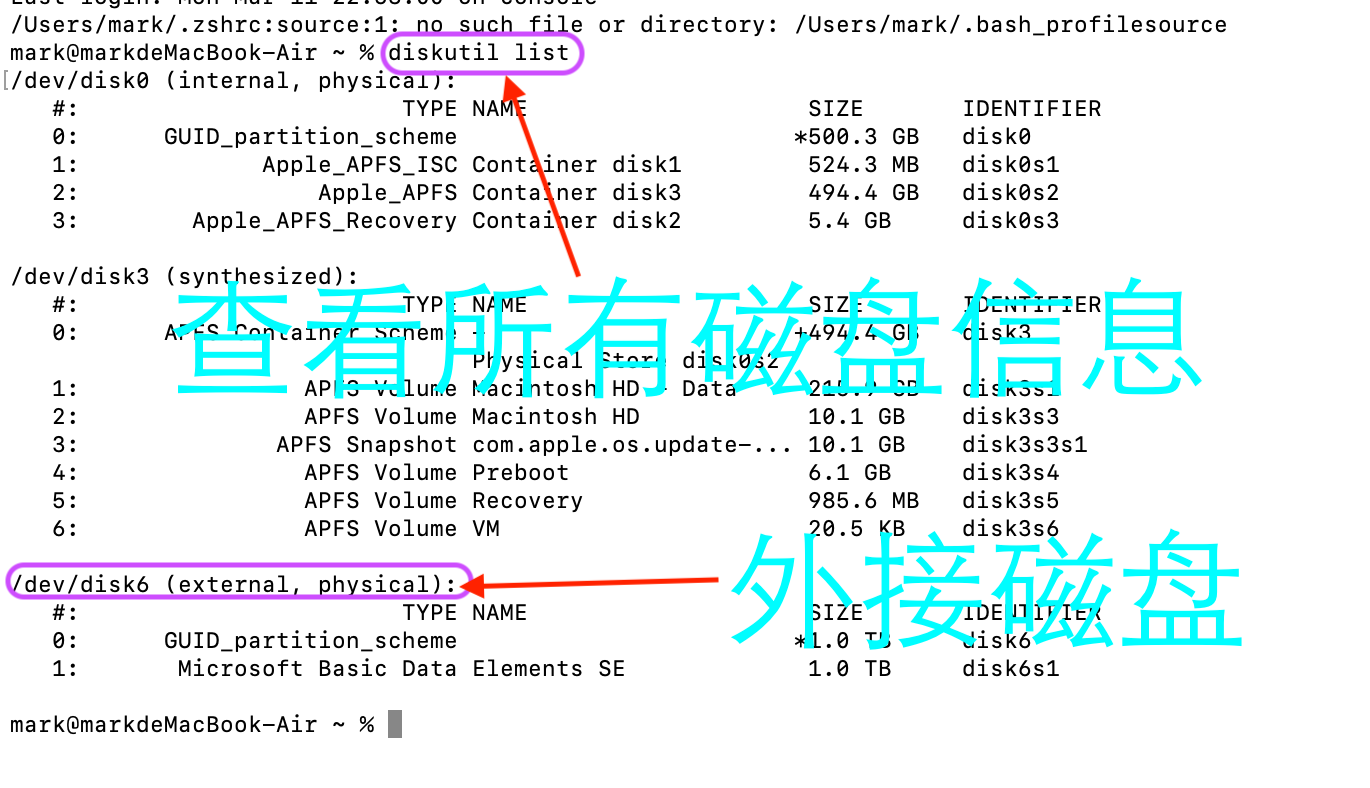
在没有推出硬盘的情况下,重启mac电脑,外接移动硬盘无法加载显示?
一、mac磁盘工具显示未装载 1.打开终端,输入 diskutil list查看当前硬盘列表,大多数时候,可以解决。 二、使用命令行装载硬盘 执行上面命令后,仍不起作用,则手动挂载,在命令行输入如下内容: …...
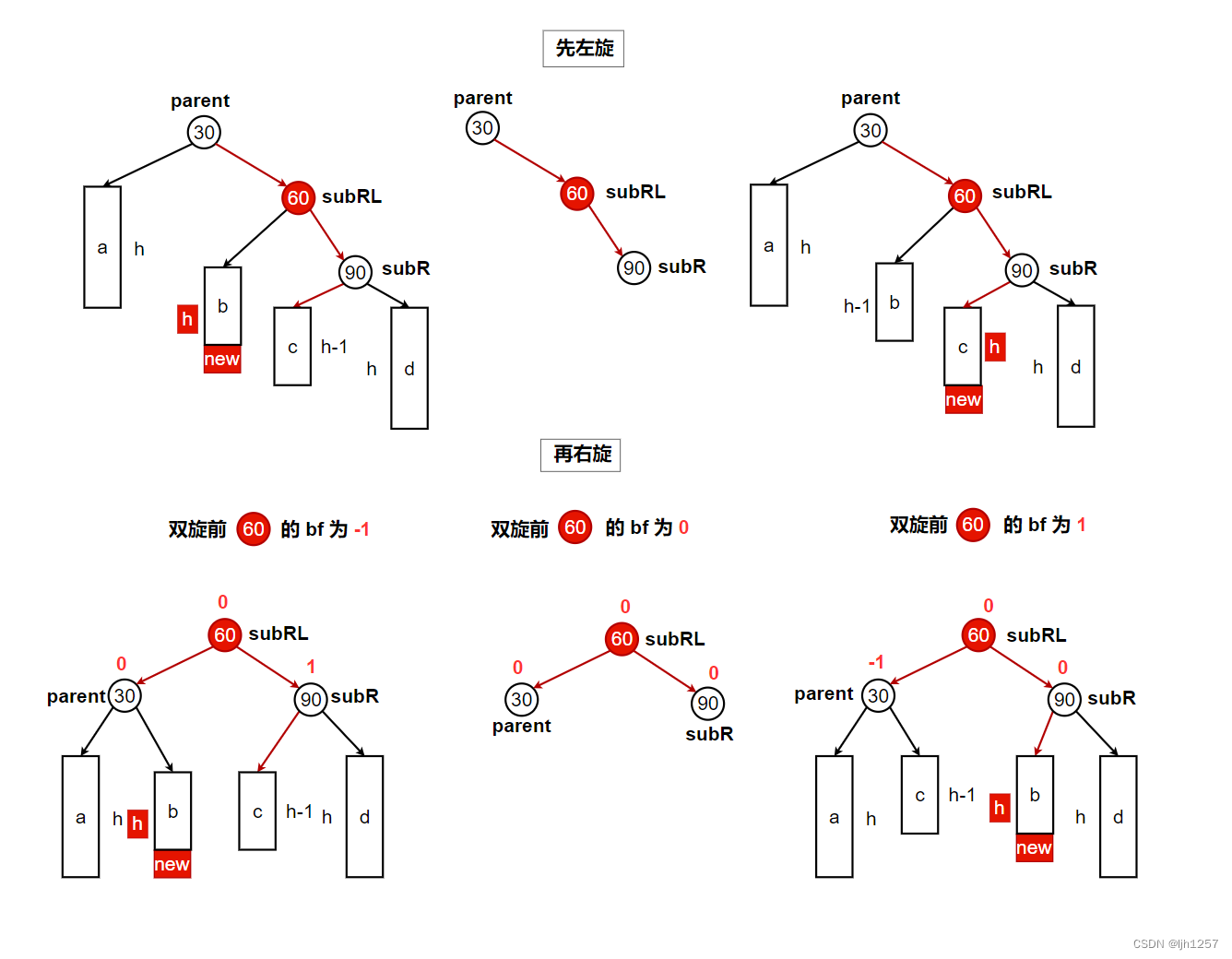
C++笔记:从零开始一步步手撕高阶数据结构AVL树
文章目录 高度平衡二叉搜索树实现一颗AVL树结点与树的描述——定义类AVL树的插入操作步骤1:按照二叉搜索树的方法插入结点步骤2:自底向上调整平衡因子步骤3:触发旋转操作(AVL树平衡的精髓)右单旋左单旋左右双旋右左双旋…...
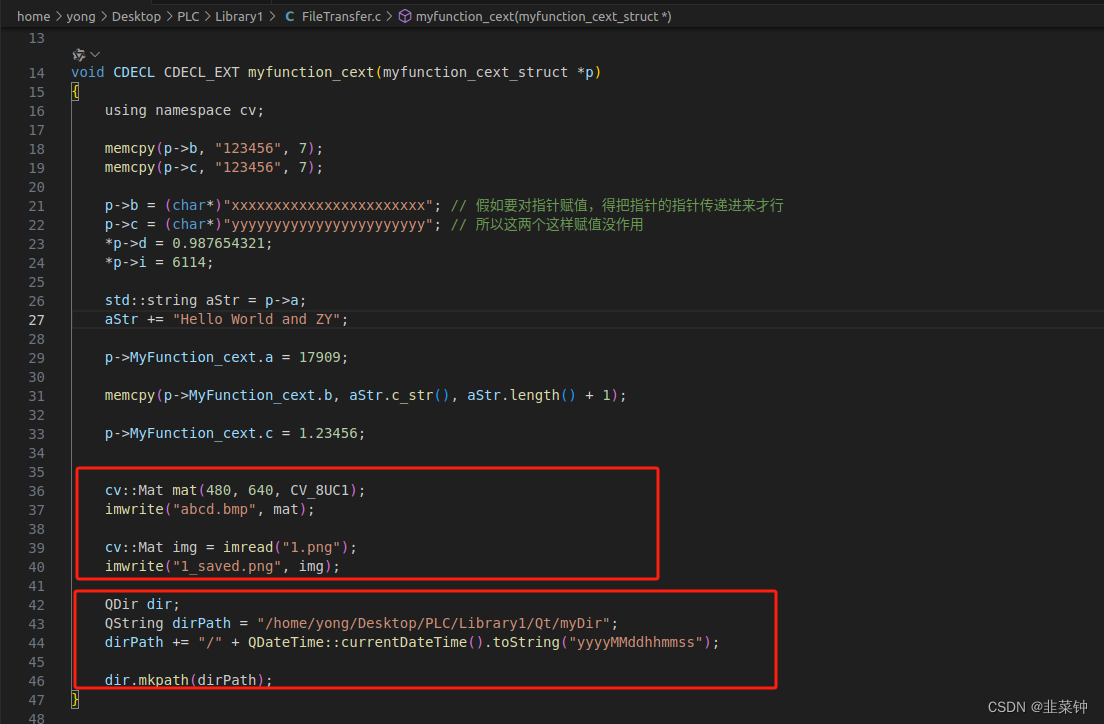
CodeSys通过C函数接口调用Qt
文章目录 1.背景介绍2.修改makefile2.1.将编译器由c改成c2.2.使能opencv库2.3.使能Qt库 3.在代码中使用Qt库函数 1.背景介绍 建议先查看之前的文章【CodeSys中调用C语言写的动态库】,了解如何创建一个能够被codesys调用的动态库。 假如想要在函数中使用Qt或者第三方…...

线性代数笔记18--行列式公式、代数余子式
1. 行列式公式推导 二阶行列式推导 [ a b c d ] [ a 0 c d ] [ 0 b c d ] [ a 0 0 d ] [ a 0 c 0 ] [ 0 b c 0 ] [ 0 b 0 d ] [ a 0 0 d ] − [ b 0 0 c ] a d − b c \begin{align} \begin{bmatrix} a & b \\ c & d \end{bmatrix}& \begin{bmatrix} a &…...

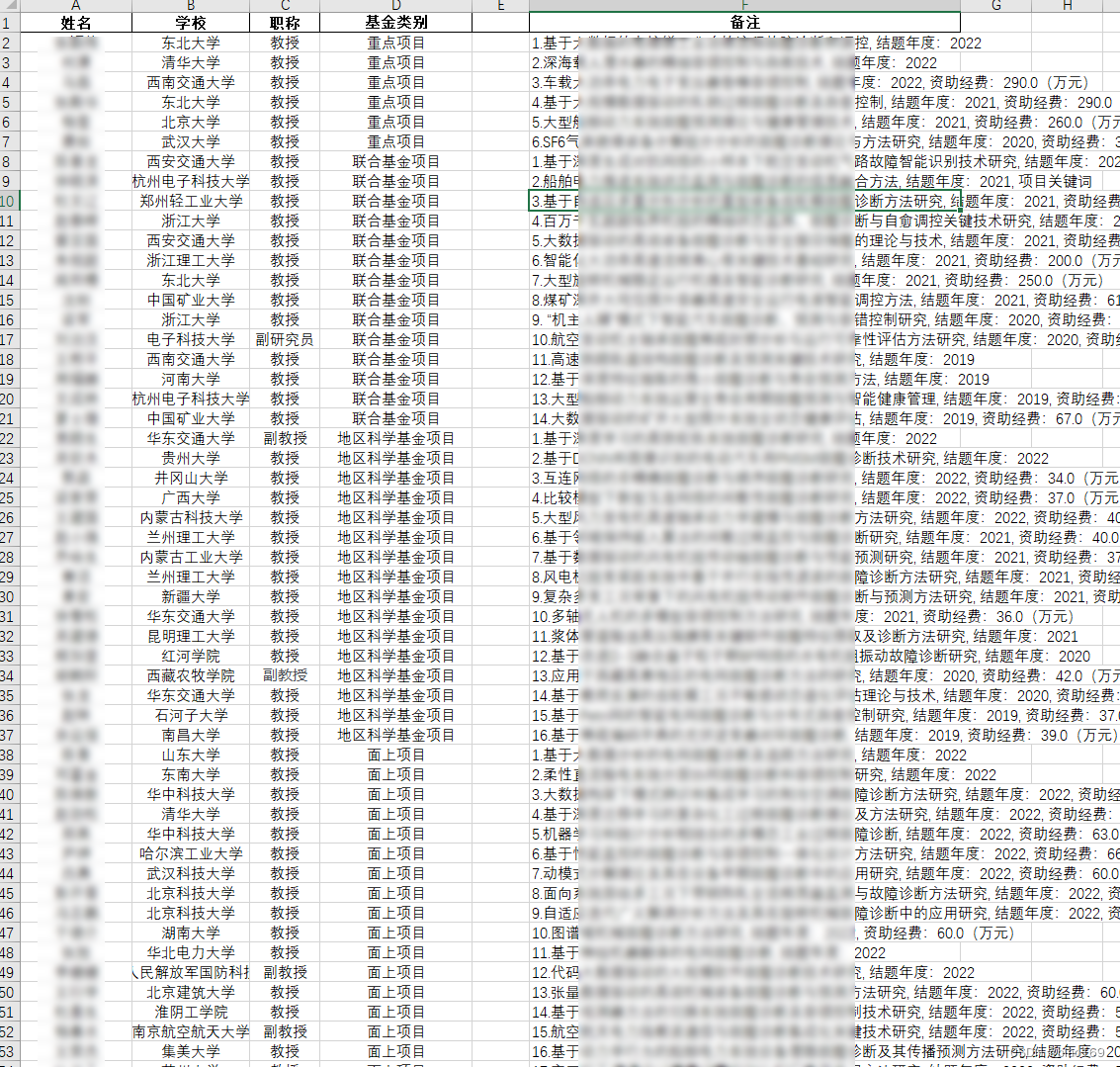
最新2024年项目基金撰写与技巧及GPT融合应用
随着社会经济发展和科技进步,基金项目对创新性的要求越来越高。申请人需要提出独特且有前瞻性的研究问题,具备突破性的科学思路和方法。因此,基金项目申请往往需要进行跨学科的技术融合。申请人需要与不同领域结合,形成多学科交叉…...

Java八股文(Element Plus)
Java八股文のElement Plus Element Plus Element Plus 什么是Element UI 和 Element Plus? Element UI 和 Element Plus 是基于 Vue.js 的一套非常受欢迎的开源 UI 组件库,用于快速构建具有现代化设计和丰富交互效果的前端界面。 Element UI 和 Element…...
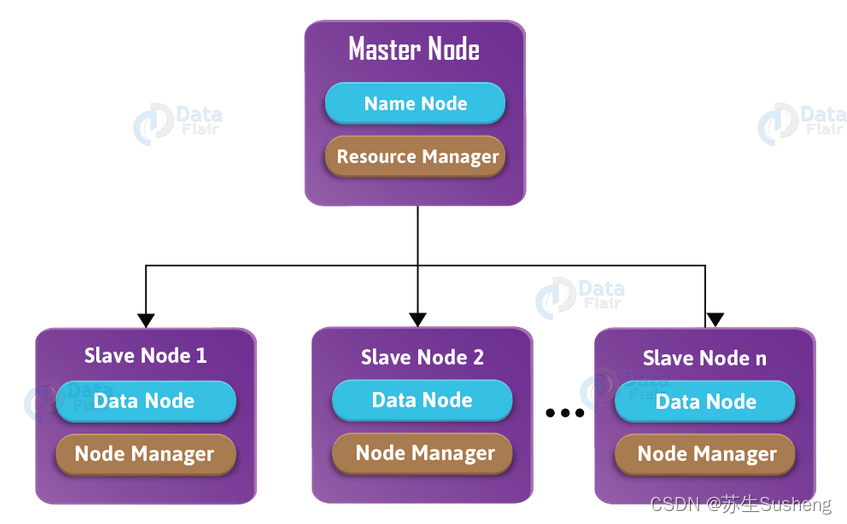
【Hadoop】Hadoop概述与核心组件
目录 Hadoop概述Hadoop 发展历史Hadoop 三大发行版本1.Apache Hadoop(常用)2.Cloudera Hadoop3.Hortonworks Hadoop优势优势总结——4高(高可靠、高扩展、高效、高容错) Hadoop组成1.HDFS管理者:NameNode(n…...

3D地图在BI大屏中的应用实践
前言 随着商业智能的不断发展,数据可视化已成为一项重要工具,有助于用户更好地理解数据和分析结果。其中,3D地图作为一种可视化工具,已经在BI大屏中得到了广泛地应用。 3D地图通过将地理信息与数据相结合,以更加直观…...
JavaScript 进阶(二)
一、深入对象 1.1创建对象三种方式 1. 利用对象字面量创建对象 2. 利用 new Object 创建对象 3.利用构造函数创建对象 1.2 构造函数 构造函数 : 是一种特殊的函数,主要用来初始化对象。 使用场景: 常规的 {...} 语法允许创建一个对象。…...
基于ssm+layui的图书管理系统
基于ssmlayui的图书管理系统 账户类型分为:管理员,用户管理员私有功能用户私有功能公共功能技术栈功能实现图 视频演示 账户类型分为:管理员,用户 图书管理系统主要登录账户类型为管理员账户与用户账户 管理员私有功能 账户管理…...

2024年最新阿里云和腾讯云云服务器价格租用对比
2024年阿里云服务器和腾讯云服务器价格战已经打响,阿里云服务器优惠61元一年起,腾讯云服务器61元一年,2核2G3M、2核4G、4核8G、4核16G、8核16G、16核32G、16核64G等配置价格对比,阿腾云atengyun.com整理阿里云和腾讯云服务器详细配…...
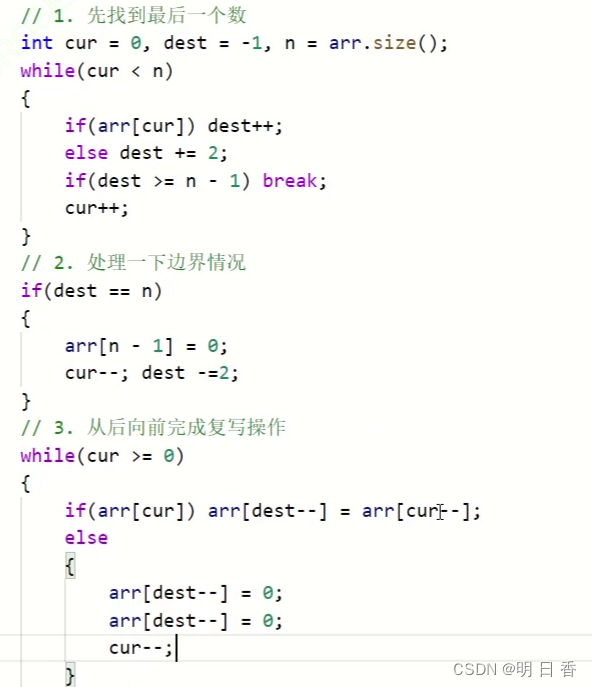
双指针算法_复写零
题目: 给一个固定长度的数组arr,将数组中出现的每一个0都复写一遍,并且将其余元素都往右移动 且不要再超过数组长度的位置写入元素,在数组上直接修改 示例: 双数组模拟操作: 从示例来看,因为…...

自习室预订系统|基于springboot框架+ Mysql+Java+B/S架构的自习室预订系统设计与实现(可运行源码+数据库+设计文档+部署说明)
推荐阅读100套最新项目 最新ssmjava项目文档视频演示可运行源码分享 最新jspjava项目文档视频演示可运行源码分享 最新Spring Boot项目文档视频演示可运行源码分享 目录 前台功能效果图 学生功能模块 管理员功能登录前台功能效果图 系统功能设计 数据库E-R图设计 lunwen参…...

Unity-MCP协议:可嵌入、可协商的AI上下文通信标准
1. 这不是又一个“AI插件”,而是Unity开发工作流的底层重定义你有没有过这样的时刻:在Unity里反复调整Animator Controller的过渡条件,只为让角色转身动画不穿模;写完一段NavMesh寻路逻辑,却要花两小时调试Agent卡在斜…...

ThinkPad开机嘀嘀响或报2100/2110错误?可能是硬盘松了!自己动手检测与修复指南
ThinkPad开机嘀嘀响或报2100/2110错误?三步排查硬盘接触不良问题ThinkPad用户对那个标志性的开机"嘀嘀"声再熟悉不过——正常情况下它意味着系统自检通过。但当这个声音变成急促的报警音,伴随屏幕上出现"2100 Detection error"或&qu…...

癫痫手术精准定位:基于脑电信号昼夜节律与多生物标志物的机器学习分析框架
1. 项目概述:当机器学习遇见脑电信号,如何让癫痫手术更精准?作为一名长期耕耘在生物医学信号处理与机器学习交叉领域的工程师,我常常思考如何将算法模型从实验室的“玩具”变成临床医生手中可靠的“手术刀”。癫痫,这个…...

【CP-05】RTE运行时环境 - SWC的操作系统接口
CP-05_RTE运行时环境【CP-05】RTE运行时环境 - SWC的“操作系统接口”前言在AUTOSAR架构中,RTE(Runtime Environment,运行时环境)是一个常被提及却难以理解的概念。它像是应用层软件组件(SW-C)与底层基础软…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

echarts中heatmap鼠标滚动禁用缩放,向下滚动
配置如下效果如下...

基于双T振荡器的正弦波LED调光电路设计与实践
1. 项目概述:用双T振荡器实现正弦波LED调光最近在捣鼓一些氛围灯项目,总感觉用单片机PWM做的呼吸灯效果有点“硬”,那种线性的明暗变化看久了难免审美疲劳。于是翻出以前模拟电路的老本行,琢磨着能不能用纯硬件的方式,…...

巧用对称性与平均值原理:低成本实现高精度电阻分压器校准
1. 项目概述:用数学思维突破测量设备的精度极限在电子实验室里捣鼓精密电路,尤其是涉及到电压基准、信号调理或者高精度ADC前端时,一个绕不开的坎就是精密分压器。你可能在设计一个需要0.1%甚至更高精度的分压网络,但手头的万用表…...

探索Windows 10上的Android世界:揭秘WSA-Windows-10项目的3个技术突破
探索Windows 10上的Android世界:揭秘WSA-Windows-10项目的3个技术突破 【免费下载链接】WSA-Windows-10 This is a backport of Windows Subsystem for Android to Windows 10. 项目地址: https://gitcode.com/gh_mirrors/ws/WSA-Windows-10 想象一下&#…...

PrivacyGuard实战:基于实证差分隐私的机器学习模型隐私审计框架
1. 项目概述与核心价值在过去的几年里,我亲眼见证了机器学习模型从实验室走向银行、医疗、社交网络等各个敏感领域的全过程。模型性能的每一次飞跃都令人兴奋,但随之而来的隐私泄露事件也一次次为我们敲响警钟。一个在医疗数据上训练出的诊断模型&#x…...