RK3568驱动OV13850摄像头模组调试过程
摄像头介绍
品牌:Omnivision
型号:CMK-OV13850
接口:MIPI
像素:1320W

OV13850彩色图像传感器是一款低电压、高性能1/3.06英寸1320万像素CMOS图像传感器,使用OmniBSI+?技术提供了单-1320万像素(4224×3136)摄像头的功能。通过串行摄像头控制总线(SCCB)接口的控制,它提供了全帧、下采样、开窗的10位MIPI图像。
OV13850拥有一个能够在10位1320万像素分辨率下以每秒24帧(fps)的速度运行的图像阵列,用户可以完全控制图像质量、格式和输出数据传输。所有需要的图像处理功能,包括曝光控制、白平衡、缺陷像素消除等,都可以通过SCCB接口进行编程。


此外,OmniBSI图像传感器使用专有的传感器技术,通过减少或消除固定图案噪声、污迹等常见的图像污染光源来提高图像质量,从而产生干净、完全稳定的彩色图像。
为了提供定制信息,OV13850包括一个单编程(OPT)存储器。OV13850拥有最多4车道的MIPI接口。
硬件连接方式如下图:摄像头的I2C接口使用RK3568的I2C4引脚,RESET, PWRDOWN使用普通IO口,三路电源供电使用LDO,LDO由普通IO来控制使能,用于控制上电时序。图像传输接口使用CSI2, 4lan MIPI接口。

RK3568设备树修改
OV13850的设备树修改可以参考其他芯片的设备树,在RK3568 Linux SDK中可以搜索到很多,主要是就是配置OV13850使用的复位控制引脚,I2C通信引脚,PWDNB引脚,三路电源上电控制引脚,CIF_CLK时钟引脚,如下面的I2C部分的设备树,调试OV13850时应首先从I2C调试开始,I2C通了后才会加载MIPI部分的驱动。
&i2c4 {status = "okay";clock-frequency = <400000>;ov13850: ov13850@10 {compatible = "ovti,ov13850";status = "okay";reg = <0x10>;clocks = <&cru CLK_CIF_OUT>;clock-names = "xvclk";power-domains = <&power RK3568_PD_VI>;pinctrl-names = "rockchip,camera_default","rockchip,camera_sleep";pinctrl-0 = <&cif_clk>;pinctrl-1 = <&cam0_sleep_pins>;//pinctrl-2 = <&cif_clk>;avdd-supply = <&avdd_2v8_camera_power>; /* 2.8v */dvdd-supply = <&dvdd_1v2_camera_power>; /* 1.2v */dovdd-supply = <&dovdd_1v8_camera_power>; /* 1.8v *//* reset and pwdn */reset-gpios = <&gpio1 RK_PD1 GPIO_ACTIVE_HIGH>;pwdn-gpios = <&gpio1 RK_PD2 GPIO_ACTIVE_HIGH>;rockchip,camera-module-index = <0>;rockchip,camera-module-facing = "back";rockchip,camera-module-name = "CMK-CT0116";rockchip,camera-module-lens-name = "Largan-50013A1";lens-focus = <&vm149c>;port {ov13850_out0: endpoint {remote-endpoint = <&mipi_in_ucam0>;data-lanes = <1 2 3 4>;};};};vm149c: vm149c@0c {compatible = "silicon touch,vm149c";status = "okay";reg = <0x0c>;rockchip,camera-module-index = <0>;rockchip,camera-module-facing = "back";rockchip,vcm-start-current = <20>; // 马达的启动电流rockchip,vcm-rated-current = <80>; // 马达的额定电流rockchip,vcm-step-mode = <13>; // 马达驱动 ic 的电流输出模式};};/*camera avdd 2.8V LDO poweren*/avdd_2v8_camera_power:avdd-2v8-camera-regulator {compatible = "regulator-fixed";regulator-name = "avdd_2v8_camera_power";enable-active-high;gpio = <&gpio3 RK_PA7 GPIO_ACTIVE_HIGH>;pinctrl-names = "default";pinctrl-0 = <&avdd2v8_camera_en_pin>;//regulator-always-on;};/*camera dvdd 1.2V LDO poweren*/dvdd_1v2_camera_power:dvdd-1v2-camera-regulator {compatible = "regulator-fixed";regulator-name = "dvdd_1v2_camera_power";enable-active-high;gpio = <&gpio3 RK_PC5 GPIO_ACTIVE_HIGH>;pinctrl-names = "default";pinctrl-0 = <&dvdd1v2_camera_en_pin>;//regulator-always-on;};/*camera dovdd 1.8V LDO poweren*/dovdd_1v8_camera_power:dovdd-1v8-camera_regulator {compatible = "regulator-fixed";regulator-name = "dovdd_1v8_camera_power";enable-active-high;gpio = <&gpio3 RK_PC1 GPIO_ACTIVE_HIGH>;pinctrl-names = "default";pinctrl-0 = <&dovdd1v8_camera_en_pin>;//regulator-always-on;};MIPI部分的设备树可以参考原来开发板上提供的XC7160摄像头来修改,使用full mode ,即4lan CSI2接口,最后修改的如下。
&csi2_dphy_hw {status = "okay";
};&csi2_dphy0 {status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;#address-cells = <1>;#size-cells = <0>;mipi_in_ucam0: endpoint@0 {reg = <0>;remote-endpoint = <&ov13850_out0>;data-lanes = <1 2 3 4>;};};port@1 {reg = <1>;#address-cells = <1>;#size-cells = <0>;csidphy_out: endpoint@0 {reg = <0>;remote-endpoint = <&isp0_in>;};};};
};&rkisp_vir0 {status = "okay";port {#address-cells = <1>;#size-cells = <0>;isp0_in: endpoint@0 {reg = <0>;remote-endpoint = <&csidphy_out>;};};
};&rkisp_vir1 {status = "disabled";
};&csi2_dphy1 {status = "disabled";/** dphy1 only used for split mode,* can be used concurrently with dphy2* full mode and split mode are mutually exclusive*/
};&csi2_dphy2 {status = "disabled";/** dphy2 only used for split mode,* can be used concurrently with dphy1* full mode and split mode are mutually exclusive*/
};&rkisp {status = "okay";
};&rkisp_mmu {status = "okay";
};
硬件由于是公司第一次做,驱动第一次调,所以调试过程中肯定会遇到问题。果不然,设备树改好后,上电I2C通信不上,即无法使用0x10的地址来识别摄像头。而且识别的摄像头I2C从机地址是0x0b,0x0C,其中0x0C是摄像头内的一个芯片AD5823, 对应的驱动程序就是设备树中的vm149c。
经过使用 sudo i2ctransfer -f -y 4 w2@0x0c 0x30 0x0a r2 读取摄像头ID寄存器0x300A 测试,发现摄像头返回的是0x30 0x0A,总结出来的规律就是读任何寄存器,都返回的是寄存器的地址。


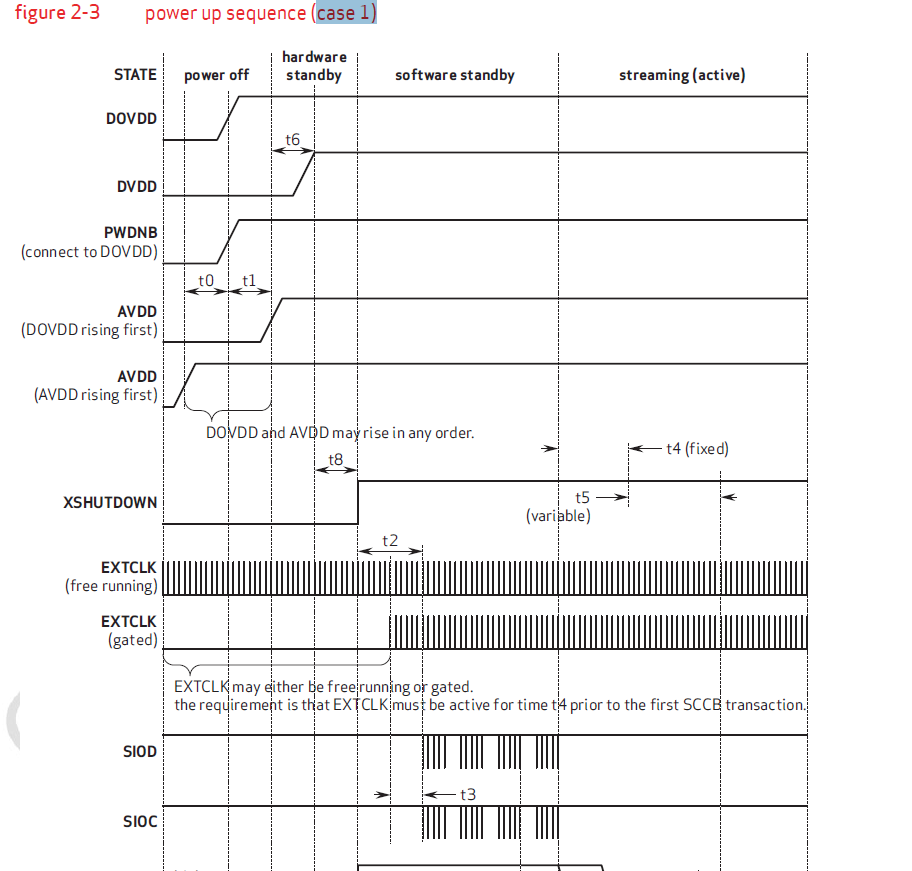
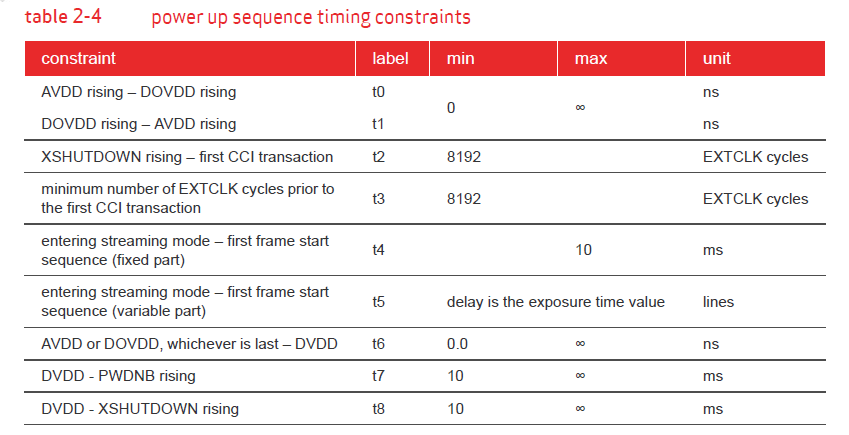
由于一时找不到软件的问题,就让硬件使用示波器测试了一下,三路电源上电的时序是avdd先上,之后是dovdd和dvdd,根据手册上电之间的延时大于0ns即可,如下图。示波器测量显示上电顺序是按照avdd,dovdd,dvdd的顺序,之间的延时为50us, 这个延时就是程序执行先后打开各路电源的运行时间。
之后又测量了I2C的时钟,数据线也未发现问题,测量了一下CIF_CLKOUT信号,这个信号是由RK3568输出给摄像头的,时钟频率是24M,由于摄像头I2C初始读取ID失败后,会关闭电源与时钟,所以24M的时钟只是在初始化时有,一会就没有了。
硬件测试也没有找到问题,那看来还得接着找软件的问题,当然看了不少csdn文章,之后又研究了一下ov13850的驱动程序,ov13850.c,重点看了一下__ov13850_power_on函数,这个函数。
static const char * const ov13850_supply_names[] = {"avdd", /* Analog power */"dovdd", /* Digital I/O power */"dvdd", /* Digital core power */
};static int __ov13850_power_on(struct ov13850 *ov13850)
{int ret;u32 delay_us;struct device *dev = &ov13850->client->dev;//硬件设计中摄像头的三路电源全是分别控制的,所以此power_gpio没有引脚对应,也没有设备树if (!IS_ERR(ov13850->power_gpio))gpiod_set_value_cansleep(ov13850->power_gpio, 1);usleep_range(1000, 2000);//pins_default对应设备树中的cif_clk,用于初始RK3568输出的24M时钟,此程序用于配置时钟引脚的为时钟输出功能if (!IS_ERR_OR_NULL(ov13850->pins_default)) {ret = pinctrl_select_state(ov13850->pinctrl,ov13850->pins_default);if (ret < 0)dev_err(dev, "could not set pins\n");}//设置xvclk时钟为24Mret = clk_set_rate(ov13850->xvclk, OV13850_XVCLK_FREQ);if (ret < 0)dev_warn(dev, "Failed to set xvclk rate (24MHz)\n");if (clk_get_rate(ov13850->xvclk) != OV13850_XVCLK_FREQ)dev_warn(dev, "xvclk mismatched, modes are based on 24MHz\n");ret = clk_prepare_enable(ov13850->xvclk);if (ret < 0) {dev_err(dev, "Failed to enable xvclk\n");return ret;}if (!IS_ERR(ov13850->reset_gpio))//复位信号输出为无效,即如果设备树中reset-gpios = <&gpio1 RK_PD1 GPIO_ACTIVE_HIGH>,此时输出的电源就是低电平gpiod_set_value_cansleep(ov13850->reset_gpio, 0);//打开摄像头供电的三路电源,电源的打开的顺序按照ov13850_supply_names数组中定义的顺序,由于设备树中使用的regulaor来控制电源,所以这部分代码有效ret = regulator_bulk_enable(OV13850_NUM_SUPPLIES, ov13850->supplies);if (ret < 0) {dev_err(dev, "Failed to enable regulators\n");goto disable_clk;}if (!IS_ERR(ov13850->reset_gpio))//复位信号输出为有效,即如果设备树中reset-gpios = <&gpio1 RK_PD1 GPIO_ACTIVE_HIGH>,此时输出的电源就是高电平gpiod_set_value_cansleep(ov13850->reset_gpio, 1);usleep_range(500, 1000);if (!IS_ERR(ov13850->pwdn_gpio))//pwdn_gpio信号输出为有效,即如果设备树中pwdn-gpios = <&gpio1 RK_PD1 GPIO_ACTIVE_HIGH>,此时输出的电源就是高电平gpiod_set_value_cansleep(ov13850->pwdn_gpio, 1);/* 8192 cycles prior to first SCCB transaction */delay_us = ov13850_cal_delay(8192);usleep_range(delay_us, delay_us * 2);return 0;disable_clk:clk_disable_unprepare(ov13850->xvclk);return ret;
}上面的程序看懂了,下面开始使用万用表来测量reset,pwdn这两个引脚的状态,由于摄像头初始化失败后会进行power_off操作,所以为了测量上电时电平是否正常,把__ov13850_power_off函数中代码关闭,使之一直保持在上电状态。
程序改好后,下载,测量,果然发现pwdn这个信号电平不对,这个信号串联了一个22欧姆的电阻,测量这两个电阻两边的电压一端是0V, 一端是1.8V,电阻坏了,换一个新的,同时检查了一下其他电阻有也坏的,一起更换。换好后,发现电平信号是低电平,电阻两端都是低电平,对着上电时序一下,上电后应该为高电平才对,修改设备树pwdn-gpios = <&gpio1 RK_PD2 GPIO_ACTIVE_LOW>; -->pwdn-gpios = <&gpio1 RK_PD2 GPIO_ACTIVE_HIGH>;同样对比了一个reset管脚,也是设备树的配置成低电平了。编译程序,开机,摄像头驱动成功加载了,能够识别到摄像头芯片的ID, 加载了视频驱动设备video0-video8, media0。

总结调试遇到的问题,硬件问题与软件问题都有,所以一定要2方面都去查找。硬件问题就是电阻坏了。软件问题是开始设备树写的并不对,先后调整了很多次最后才调试出来的。其他要说的一点就是OV13850驱动程序的reset,pwrdn引脚的有效电平问题与其他芯片驱动的有效电平的意思正好相反,reset信号是在低电平时复位,pwrdn信号是在低电平时有效,所以原来设备树中写成GPIO_ACTIVE_LOW的方式是符合常理的,是驱动程序中把电平的高低有效用反了,实际最应该修改驱动程序ov13850.c中的程序的reset, pwrdn信号的控制电平。
显示效果
显示效果如下,此时摄像头只能显示天花板上面的灯,其他物体无法成像,只有在强光照射下才能成像,因此还需要做进一步的调试。

特别鸣谢
在调试摄像头的过程中,参考了很多csdn朋友写的文章,感谢各位的分享,我也以分享的方式回馈大家。具体参考链接如下:
RK3566调试GC2053_火柴棍mcu的博客-CSDN博客
(24条消息) 摄像头ov13850移植笔记_布道师Peter的博客-CSDN博客
(7条消息) 关于RK3399平台OV13850摄像头调试的问题_ov13850摄像头好吗_溯之源的博客-CSDN博客
相关文章:
RK3568驱动OV13850摄像头模组调试过程
摄像头介绍品牌:Omnivision型号:CMK-OV13850接口:MIPI像素:1320WOV13850彩色图像传感器是一款低电压、高性能1/3.06英寸1320万像素CMOS图像传感器,使用OmniBSI?技术提供了单-1320万像素(42243136)摄像头的…...
Go项目的目录结构基本布局
前言 随着项目的代码量在不断地增长,不同的开发人员按自己意愿随意布局和创建目录结构,项目维护性就很差,代码也非常凌乱。良好的目录与文件结构十分重要,尤其是团队合作的时候,良好的目录与文件结构可以减少很多不必要…...
CHAPTER 1 Linux Filesystem Management
Linux Filesystem Management1 文件系统是什么2 文件系统的组成3 inode详解1. inode到底是什么2. inode的内容3. inode的大小4. inode的号码5. 硬链接6. 软链接4 存储区域5 常见文件系统的类型1. 根文件系统2. 虚拟文件系统3. 真文件系统4. 伪文件系统5. 网络文件系统1 文件系统…...

RocketMQ架构篇 - 读写队列与生产者如何选择队列
读、写队列 创建主题时,可以指定 writeQueueNums(写队列的个数)、readQueueNums(读队列的个数)。生产者发送消息时,使用写队列的个数返回路由信息;消费者消费消息时,使用读队列的个…...
)
华为OD机试真题Python实现【通信误码】真题+解题思路+代码(20222023)
通信误码 题目 信号传播过程中会出现一些误码,不同的数字表示不同的误码 ID,取值范围为 1~65535,用一个数组记录误码出现的情况,每个误码出现的次数代表误码频度,请找出记录中包含频度最高误码的最小子数组长度。 🔥🔥🔥🔥🔥👉👉👉👉👉👉 华为OD…...
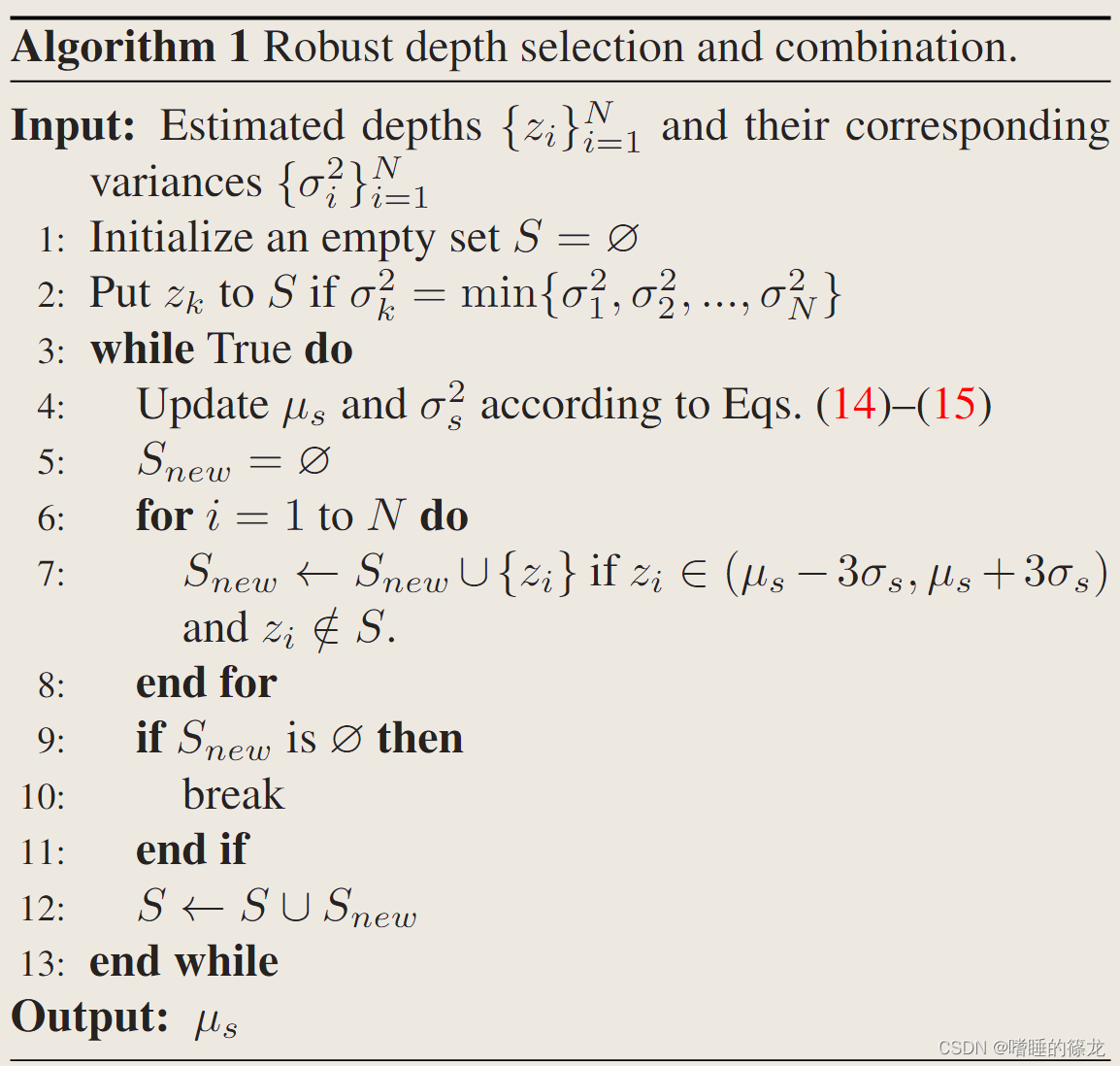
【单目3D目标检测】MonoDDE论文精读与代码解析
文章目录PrefacePros and ConsAbstractContributionsPreliminaryDirect depth estimationDepth from heightPespective-n-point(PnP)PipelineDiverse Depth EstimationsRobust Depth CombinationOutput distributionSelecting and combining reliable de…...
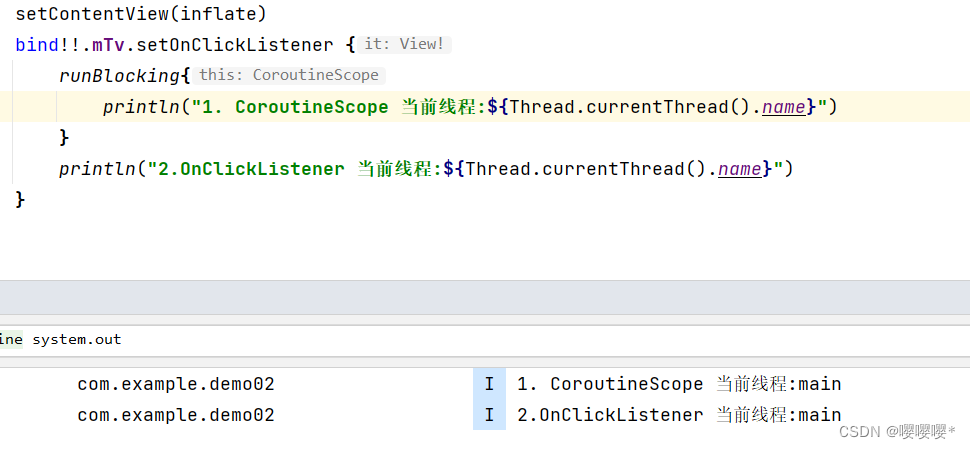
复习 Kotlin 从小白到大牛 第二版 笔记要点
4.2.2 常量和只读变量 常量和只读变量一旦初始化就不能再被修改。在kotlin中,声明常量是在标识符的前面加上val或const val 关键字。 1. val 声明的是运行时变量,在运行时进行初始化 2.const val 声明的是编译时常量,在编译时初始化 val …...
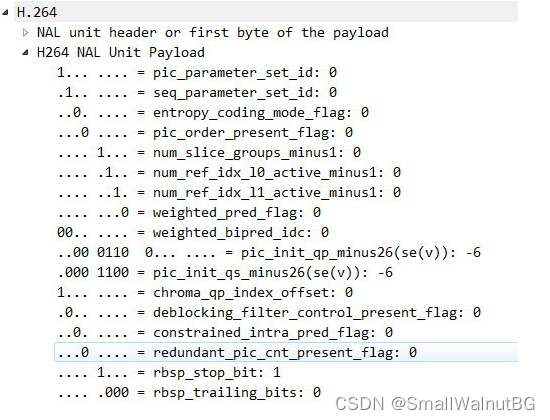
X264简介-Android使用(二)
X264简介-Android使用(二) 4、Ubuntu上安装ffmpeg: 检查更新本地软件包(如果未更新,reboot Vmware): sudo apt update sudo apt upgrade官网下载的source文件安装: http://ffmpe…...
)
【独家】华为OD机试 - 统计差异值大于相似值二元组个数(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...
掌握好Framework 才是王道~
现在面试对Android开发者的要求越来越高了!从最开始的阿里、头条、腾讯等大厂,到现在的互联网车企,面试总喜欢问道 Framework底层原理的相关问题 Android Framework的三大核心功能: 1、View.java:View工作原理,实现包…...
 A — C)
Codeforces Round 856 (Div. 2) A — C
Codeforces Round 856 (Div. 2) 文章目录A. Prefix and Suffix Array题目大意题目分析codeB. Not Dividing题目大意题目分析codeC. Scoring Subsequences题目大意题目分析codeA. Prefix and Suffix Array 题目大意 给出一个字符串所有的非空前后缀,判断原字符串是…...
2022年MathorCup数学建模B题无人仓的搬运机器人调度问题解题全过程文档加程序
2022年第十二届MathorCup高校数学建模 B题 无人仓的搬运机器人调度问题 原题再现 本题考虑在无人仓内的仓库管理问题之一,搬运机器人 AGV 的调度问题。更多的背景介绍请参看附件-背景介绍。对于无人仓来说,仓库的地图模型可以简化为图的数据结构。 仓库…...
开源项目的演进会遇到哪些“坑”?KubeVela 从发起到晋级 CNCF 孵化的全程回顾
作者:孙健波、曾庆国 点击查看:「开源人说」第五期《KubeVela:一场向应用交付标准的冲锋》 2023 年 2 月,**KubeVela [ 1] ** 经过全体 ToC 投票成功进入 CNCF Incubation,是云原生领域首个晋级孵化的面向应用的交付…...
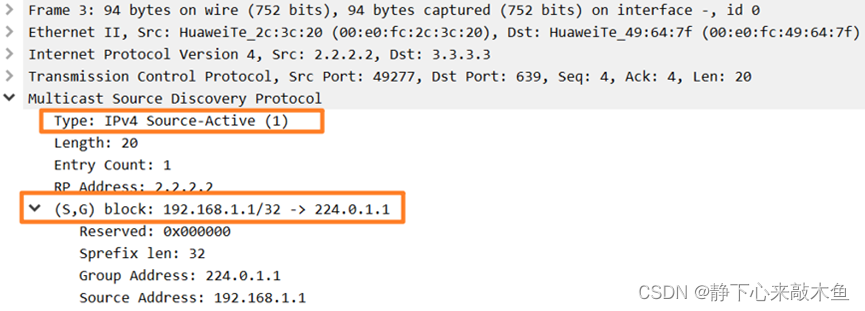
MSDP实验配置
目录 配置MSDP 配置PIM SM协议 配置各PIM SM域内的静态RP 配置MSDP对等体 配置域内的MSDP对等体 AR8和AR9建立EBGP邻居 配置域间的MSDP对等体 进行实验验证 什么是MSDP MSDP(Multicast Source Discovery Protocol)组播源发现协议的简称 用来传递…...
惊!初中生也来卷了……
大家好,我是良许。 前两天在抖音直播的时候,突然来了一位不速之客…… 他自称是初中生,一开始我还有点不太相信,直到跟他连麦,听到他还略带一些稚嫩的声音,我才知道,他没有骗我…… 他说他想学…...

kafka相关配置介绍
kafka默认配置 每个kafka broker中配置文件server.properties默认必须配置的属性如下: broker.id0 num.network.threads2 num.io.threads8 socket.send.buffer.bytes1048576 socket.receive.buffer.bytes1048576 socket.request.max.bytes104857600 log.dirs/tmp/…...
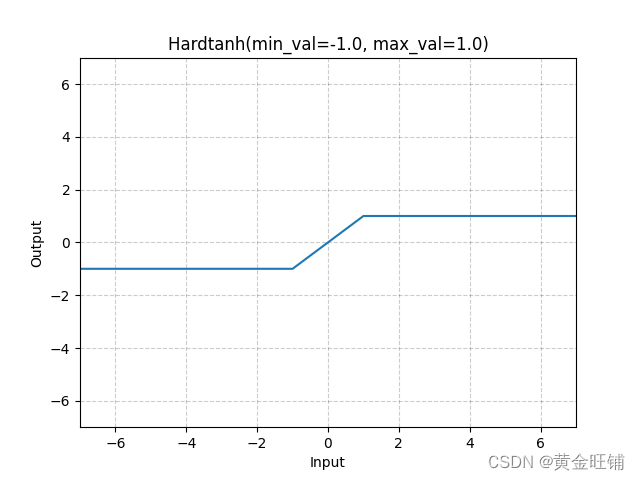
【PyTorch】教程:torch.nn.Hardtanh
torch.nn.Hardtanh 原型 CLASS torch.nn.Hardtanh(min_val- 1.0, max_val1.0, inplaceFalse, min_valueNone, max_valueNone) 参数 min_val ([float]) – 线性区域的最小值,默认为 -1max_val ([float]) – 线性区域的最大值,默认为 1inplace ([bool]) …...

神垕古镇景区5A级十年都没有实现的三大主因
钧 瓷 内 参 第40期(总第371期) 2023年3月5日 神垕古镇景区5A级十年都没有实现的三大主因 这是2013年,禹州市市政府第一次提出创建5A级景区到今年三月份整整十年啊! 目前神垕古镇景区是4A级景区,5A级一直进行中&a…...

react函数组件常用的几个钩子函数useState、useEffect、useRef、useCallback
react框架react框架包括包括两大类:类组件函数组件。类组件构成:constructor自定义方法。调用方法通过this.方法名()。constructor(superstate)构造器里面必有super字段。render()方法里面写页面布局。函数组件构成:各种钩子函数return()方法…...
4N60-ASEMI高压MOS管4N60
编辑-Z 4N60在TO-220封装里的静态漏极源导通电阻(RDS(ON))为2.5Ω,是一款N沟道高压MOS管。4N60的最大脉冲正向电流ISM为16A,零栅极电压漏极电流(IDSS)为1uA,其工作时耐温度范围为-55~150摄氏度。4N60功耗(…...

深度解析Cyber Engine Tweaks:5大核心技术实现《赛博朋克2077》脚本框架逆向工程
深度解析Cyber Engine Tweaks:5大核心技术实现《赛博朋克2077》脚本框架逆向工程 【免费下载链接】CyberEngineTweaks Cyberpunk 2077 tweaks, hacks and scripting framework 项目地址: https://gitcode.com/gh_mirrors/cy/CyberEngineTweaks Cyber Engine …...

基于CRICKIT与CPX的交互式电子展板:从传感器到执行器的完整原型开发指南
1. 项目概述:打造一个会“思考”和“反应”的电子展板如果你对Arduino或树莓派这类微控制器项目感兴趣,但又觉得从零开始连接电机、灯带、传感器,还要处理复杂的电源和信号问题,过程太过繁琐和容易出错,那么这个项目可…...

[特殊字符] CSS 图片变黑变暗的 3 种方案,总有一款适合你!
最近在做项目的时候,遇到一个很常见的需求:如何让图片颜色更黑一点,或者加一层黑色透明度遮罩? 很多人第一反应是用 filter: brightness(0%),但其实这个方法有不少坑。今天就来聊聊 3 种靠谱的 CSS 方案,从…...

GBase 8c 在过程里记流水时要小心自治事务边界
GBase 8c 在过程里记流水时要小心自治事务边界 我最近看 GBase 8c 自治事务资料时,觉得它特别适合拿来讨论一个开发现场经常遇到的问题:业务过程失败了,排障流水也跟着回滚了。等真正去查问题时,只剩应用日志里几行模糊报错&#…...

Void-Memory:内存与持久化的平衡术,构建高性能本地缓存与状态存储
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫G3sparky/void-memory。乍一看这个标题,可能会让人有点摸不着头脑——“虚空记忆”?这听起来更像是一个哲学概念或者游戏里的技能名。但作为一个在技术圈摸爬滚打多年的老手&#x…...
)
DeepSeek MMLU 86.7分是怎么炼成的?从提示工程、校准策略到知识蒸馏链路(内部训练日志首次公开)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek MMLU 86.7分的里程碑意义与基准解读 MMLU 基准的本质与挑战 MMLU(Massive Multitask Language Understanding)是一项覆盖57个学科领域的综合性评测基准,涵…...

告别手动上下料:手把手教你用符合SEMI标准的EAP软件实现半导体设备自动化联机
半导体设备自动化联机实战:基于SEMI标准的EAP软件深度应用指南 在半导体制造车间里,设备工程师们每天都要面对一个令人头疼的场景:凌晨三点被报警电话惊醒,原因是某台关键设备因人工上下料失误导致整条产线停摆。这种传统手动操作…...

第11章:C++ PGO与LTO优化
第11章:C++ PGO与LTO优化 本章定位:第四卷《实战卷》第三篇"性能优化"第 11 章。 在第 10 章"找热点"和第 11 章"改代码"之后,本章讨论"什么也不改、只调编译选项"能再榨出 5%-30% 的性能:LTO 让编译器看到全程序,PGO 让它看到运…...

Pro Workflow:基于SQLite持久化记忆的AI编程助手智能协作系统
1. 项目概述:从重复纠正到智能协作的进化如果你和我一样,每天都在用Claude Code、Cursor这类AI编程助手,那你肯定经历过这个场景:周一你告诉它“测试里别用Mock数据库”,它点头答应;周五你写新功能…...

终极指南:用foo2zjs驱动100+型号打印机在Linux上完美工作
终极指南:用foo2zjs驱动100型号打印机在Linux上完美工作 【免费下载链接】foo2zjs A linux printer driver for QPDL protocol - copy of http://foo2zjs.rkkda.com/ 项目地址: https://gitcode.com/gh_mirrors/fo/foo2zjs 核心关键词:foo2zjs Li…...