深度强化学习(九)(改进策略梯度)

深度强化学习(九)(改进策略梯度)
一.带基线的策略梯度方法
Theorem:
设 b b b 是任意的函数, b b b与 A A A无关。把 b b b 作为动作价值函数 Q π ( S , A ) Q_\pi(S, A) Qπ(S,A) 的基线, 对策略梯度没有影响:
∇ θ J ( θ ) = E S [ E A ∼ π ( ⋅ ∣ S ; θ ) [ ( Q π ( S , A ) − b ) ⋅ ∇ θ ln π ( A ∣ S ; θ ) ] ] . \nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta})=\mathbb{E}_S\left[\mathbb{E}_{A \sim \pi(\cdot \mid S ; \boldsymbol{\theta})}\left[\left(Q_\pi(S, A)-b\right) \cdot \nabla_{\boldsymbol{\theta}} \ln \pi(A \mid S ; \boldsymbol{\theta})\right]\right] . ∇θJ(θ)=ES[EA∼π(⋅∣S;θ)[(Qπ(S,A)−b)⋅∇θlnπ(A∣S;θ)]].
proof:
E S [ E A ∼ π ( ⋅ ∣ S ; θ ) [ b ⋅ ∇ θ ln π ( A ∣ S ; θ ) ] ] = E A , S [ b ⋅ ∇ θ ln π ( A ∣ S ; θ ) ] = ∑ A , S b ⋅ ∇ θ π ( a ∣ s ; θ ) p ( a , s ) π ( a ∣ s ; θ ) = ∑ A , S b ⋅ ∇ θ π ( a ∣ s ; θ ) ⋅ p ( s ) = ∑ S [ b ⋅ p ( s ) ∑ A ∇ θ π ( a ∣ s ; θ ) ] = ∑ S [ b ⋅ p ( s ) ∇ θ ∑ A π ( a ∣ s ; θ ) ] = ∑ S [ b ⋅ p ( s ) ∇ θ 1 ] = 0 \begin{aligned} \Bbb E_{S}[\Bbb E_{A\sim\pi(\cdot\mid S;\boldsymbol \theta)}[b\cdot\nabla_{\boldsymbol \theta}\ln \pi(A\mid S;\boldsymbol \theta)]]&=\Bbb E_{A,S}[b\cdot \nabla_{\boldsymbol \theta}\ln \pi(A\mid S;\boldsymbol \theta)]\\ &=\sum_{A,S}b\cdot\nabla_{\boldsymbol \theta}\pi(a\mid s;\boldsymbol \theta)\frac{p(a,s)}{\pi(a\mid s;\boldsymbol \theta)}\\ &=\sum_{A,S}b\cdot\nabla_{\boldsymbol \theta}\pi(a\mid s;\boldsymbol \theta)\cdot p(s)\\ &=\sum_{S}[b\cdot p(s)\sum_{A}\nabla_{\boldsymbol \theta}\pi(a\mid s;\boldsymbol \theta)]\\ &=\sum_{S}[b\cdot p(s)\nabla_{\boldsymbol \theta}\sum_{A}\pi(a\mid s;\boldsymbol \theta)]\\ &=\sum_{S}[b\cdot p(s)\nabla_{\boldsymbol \theta}1]\\ &=0 \end{aligned} ES[EA∼π(⋅∣S;θ)[b⋅∇θlnπ(A∣S;θ)]]=EA,S[b⋅∇θlnπ(A∣S;θ)]=A,S∑b⋅∇θπ(a∣s;θ)π(a∣s;θ)p(a,s)=A,S∑b⋅∇θπ(a∣s;θ)⋅p(s)=S∑[b⋅p(s)A∑∇θπ(a∣s;θ)]=S∑[b⋅p(s)∇θA∑π(a∣s;θ)]=S∑[b⋅p(s)∇θ1]=0
所以策略梯度 ∇ θ J ( θ ) \nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta}) ∇θJ(θ) 可以近似为下面的随机梯度:
g b ( s , a ; θ ) = [ Q π ( s , a ) − b ] ⋅ ∇ θ ln π ( a ∣ s ; θ ) \boldsymbol{g}_b(s, a ; \boldsymbol{\theta})=\left[Q_\pi(s, a)-b\right] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi(a \mid s ; \boldsymbol{\theta}) gb(s,a;θ)=[Qπ(s,a)−b]⋅∇θlnπ(a∣s;θ)
无论 b b b取何值, E A , S [ g b ( s , a ; θ ) ] \Bbb E_{A,S}[\boldsymbol g_{b}(s,a;\boldsymbol \theta)] EA,S[gb(s,a;θ)]都是策略梯度的无篇估计,但是随着 b b b取值的变化,方差会出现变化。
V a r = E A , S [ ( g b ( S , A ; θ ) − ∇ θ J ( θ ) ) 2 ] = E A , S [ g b ( S , A ; θ ) 2 ] − [ ∇ θ J ( θ ) ] 2 = E A , S [ ( Q π ( S , A ) − b ) 2 ∇ θ 2 ln π ( A ∣ S ; θ ) ] − [ ∇ θ J ( θ ) ] 2 \begin{aligned} \Bbb{Var}&=\Bbb E_{A,S}[(\boldsymbol{g}_b(S, A ; \boldsymbol{\theta})-\nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta}))^2]\\ &=\Bbb E_{A,S}[\boldsymbol{g}_b(S, A ; \boldsymbol{\theta})^2]-[\nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta})]^2\\ &=\Bbb E_{A,S}[(Q_{\pi}(S,A)-b)^2\nabla_{\boldsymbol{\theta}}^2\ln \pi(A\mid S;\boldsymbol{\theta})]-[\nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta})]^2\\ \end{aligned} Var=EA,S[(gb(S,A;θ)−∇θJ(θ))2]=EA,S[gb(S,A;θ)2]−[∇θJ(θ)]2=EA,S[(Qπ(S,A)−b)2∇θ2lnπ(A∣S;θ)]−[∇θJ(θ)]2
由于 ∇ θ J ( θ ) \nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta}) ∇θJ(θ)是与 b b b无关的常数,所以仅需极小化 E A , S [ ( Q π ( S , A ) − b ) 2 ∇ θ 2 ln π ( A ∣ S ; θ ) ] \Bbb E_{A,S}[(Q_{\pi}(S,A)-b)^2\nabla_{\boldsymbol{\theta}}^2\ln \pi(A\mid S;\boldsymbol{\theta})] EA,S[(Qπ(S,A)−b)2∇θ2lnπ(A∣S;θ)]
E A , S [ ( Q π ( S , A ) − b ) 2 ∇ θ 2 ln π ( A ∣ S ; θ ) ] = E S [ E A ∼ π ( A ∣ S ; θ ) [ ( Q π ( S , A ) − b ) 2 ∇ θ 2 ln π ( A ∣ S ; θ ) ] ] = E S [ E A ∼ ∇ θ 2 π ( A ∣ S ; θ ) π ( A ∣ S ; θ ) [ ( Q π ( S , A ) − b ) 2 ] ] \begin{aligned} \Bbb E_{A,S}[(Q_{\pi}(S,A)-b)^2\nabla_{\boldsymbol{\theta}}^2\ln \pi(A\mid S;\boldsymbol{\theta})]&=\Bbb E_{S}[\Bbb E_{A\sim \pi(A\mid S;\boldsymbol \theta)}[(Q_{\pi}(S,A)-b)^2\nabla_{\boldsymbol \theta}^2\ln\pi(A\mid S;\boldsymbol \theta)]]\\ &=\Bbb E_{S}[\Bbb E_{A\sim \frac{\nabla_{\boldsymbol \theta}^2\pi(A\mid S;\boldsymbol \theta)}{\pi(A\mid S;\boldsymbol \theta)}}[(Q_{\pi}(S,A)-b)^2]] \end{aligned} EA,S[(Qπ(S,A)−b)2∇θ2lnπ(A∣S;θ)]=ES[EA∼π(A∣S;θ)[(Qπ(S,A)−b)2∇θ2lnπ(A∣S;θ)]]=ES[EA∼π(A∣S;θ)∇θ2π(A∣S;θ)[(Qπ(S,A)−b)2]]
所以要最小化方差,令 A ∼ ∇ θ 2 π ( A ∣ S ; θ ) π ( A ∣ S ; θ ) A\sim \frac{\nabla_{\boldsymbol \theta}^2\pi(A\mid S;\boldsymbol \theta)}{\pi(A\mid S;\boldsymbol \theta)} A∼π(A∣S;θ)∇θ2π(A∣S;θ)为N-K密度,则
b = E A ∼ ∇ θ 2 π ( A ∣ S ; θ ) π ( A ∣ S ; θ ) [ Q π ( S , A ) ] / E A ∼ ∇ θ 2 π ( A ∣ S ; θ ) π ( A ∣ S ; θ ) [ ] = E A ∼ π θ [ ∇ θ log π θ ( A ∣ S ) T ∇ θ log π ( A ∣ S ) Q ( S , A ) ] E A ∼ π θ [ ∇ θ log π θ ( A ∣ S ) T ∇ θ log π θ ( A ∣ S ) ] \begin{aligned} b&=\Bbb E_{A\sim \frac{\nabla_{\boldsymbol \theta}^2\pi(A\mid S;\boldsymbol \theta)}{\pi(A\mid S;\boldsymbol \theta)}}[Q_{\pi}(S,A)]/\Bbb E_{A \sim \frac{\nabla_{\boldsymbol \theta}^2\pi(A\mid S;\boldsymbol \theta)}{\pi(A\mid S;\boldsymbol \theta)}}[]\\ &=\frac{\mathbb{E}_{A \sim \pi_\theta}\left[\nabla_\theta \log \pi_\theta(A \mid S)^T \nabla_\theta \log \pi(A \mid S) Q(S, A)\right]}{\mathbb{E}_{A \sim \pi_\theta}\left[\nabla_\theta \log \pi_\theta(A \mid S)^T \nabla_\theta \log \pi_\theta(A \mid S)\right]} \end{aligned} b=EA∼π(A∣S;θ)∇θ2π(A∣S;θ)[Qπ(S,A)]/EA∼π(A∣S;θ)∇θ2π(A∣S;θ)[]=EA∼πθ[∇θlogπθ(A∣S)T∇θlogπθ(A∣S)]EA∼πθ[∇θlogπθ(A∣S)T∇θlogπ(A∣S)Q(S,A)]
,我们使用 b = E A ∼ π ( A ∣ S ) [ Q π ( S , A ) ] = V π ( S ) b=\Bbb E_{A\sim \pi(A\mid S)}[Q_{\pi}(S,A)]=V_\pi(S) b=EA∼π(A∣S)[Qπ(S,A)]=Vπ(S)作为近似代替。
我们使用状态价值 V π ( s ) V_\pi(s) Vπ(s) 作基线,得到策略梯度的一个无偏估计:
g ( s , a ; θ ) = [ Q π ( s , a ) − V π ( s ) ] ⋅ ∇ θ ln π ( a ∣ s ; θ ) . \boldsymbol{g}(s, a ; \boldsymbol{\theta})=\left[Q_\pi(s, a)-V_\pi(s)\right] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi(a \mid s ; \boldsymbol{\theta}) . g(s,a;θ)=[Qπ(s,a)−Vπ(s)]⋅∇θlnπ(a∣s;θ).
REINFORCE使用实际观测的回报 u u u 来代替动作价值 Q π ( s , a ) Q_\pi(s, a) Qπ(s,a) 。此处我们同样用 u u u 代替 Q π ( s , a ) Q_\pi(s, a) Qπ(s,a) 。此外, 我们还用一个神经网络 v ( s ; w ) v(s ; \boldsymbol{w}) v(s;w) 近似状态价值函数 V π ( s ) V_\pi(s) Vπ(s) 。这样一来, g ( s , a ; θ ) \boldsymbol{g}(s, a ; \boldsymbol{\theta}) g(s,a;θ) 就被近似成了:
g ~ ( s , a ; θ ) = [ u − v ( s ; w ) ] ⋅ ∇ θ ln π ( a ∣ s ; θ ) . \tilde{\boldsymbol{g}}(s, a ; \boldsymbol{\theta})=[u-v(s ; \boldsymbol{w})] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi(a \mid s ; \boldsymbol{\theta}) . g~(s,a;θ)=[u−v(s;w)]⋅∇θlnπ(a∣s;θ).
可以用 g ~ ( s , a ; θ ) \tilde{\boldsymbol{g}}(s, a ; \boldsymbol{\theta}) g~(s,a;θ) 作为策略梯度 ∇ θ J ( θ ) \nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta}) ∇θJ(θ) 的近似, 更新策略网络参数:
θ ← θ + β ⋅ g ~ ( s , a ; θ ) \boldsymbol{\theta} \leftarrow \boldsymbol{\theta}+\beta \cdot \tilde{\boldsymbol{g}}(s, a ; \boldsymbol{\theta}) θ←θ+β⋅g~(s,a;θ)
训练价值网络的方法是回归 (regression)。回忆一下, 状态价值是回报的期望:
V π ( s t ) = E [ U t ∣ S t = s t ] , V_\pi\left(s_t\right)=\mathbb{E}\left[U_t \mid S_t=s_t\right], Vπ(st)=E[Ut∣St=st],
期望消掉了动作 A t , A t + 1 , ⋯ , A n A_t, A_{t+1}, \cdots, A_n At,At+1,⋯,An 和状态 S t + 1 , ⋯ , S n S_{t+1}, \cdots, S_n St+1,⋯,Sn 训练价值网络的目的是让 v ( s t ; w ) v\left(s_t ; \boldsymbol{w}\right) v(st;w)拟合 V π ( s t ) V_\pi\left(s_t\right) Vπ(st), 即拟合 u t u_t ut 的期望。定义
损失失函数:
L ( w ) = 1 2 n ∑ t = 1 n [ v ( s t ; w ) − u t ] 2 . L(\boldsymbol{w})=\frac{1}{2 n} \sum_{t=1}^n\left[v\left(s_t ; \boldsymbol{w}\right)-u_t\right]^2 . L(w)=2n1t=1∑n[v(st;w)−ut]2.
设 v ^ t = v ( s t ; w ) \widehat{v}_t=v\left(s_t ; \boldsymbol{w}\right) v t=v(st;w) 。损失函数的梯度是:
∇ w L ( w ) = 1 n ∑ t = 1 n ( v ^ t − u t ) ⋅ ∇ w v ( s t ; w ) . \nabla_{\boldsymbol{w}} L(\boldsymbol{w})=\frac{1}{n} \sum_{t=1}^n\left(\widehat{v}_t-u_t\right) \cdot \nabla_{\boldsymbol{w}} v\left(s_t ; \boldsymbol{w}\right) . ∇wL(w)=n1t=1∑n(v t−ut)⋅∇wv(st;w).
做一次梯度下降更新 w \boldsymbol{w} w :
w ← w − α ⋅ ∇ w L ( w ) . \boldsymbol{w} \leftarrow \boldsymbol{w}-\alpha \cdot \nabla_{\boldsymbol{w}} L(\boldsymbol{w}) . w←w−α⋅∇wL(w).
接下来的训练过程与 r e i n f o r c e reinforce reinforce一样。
二.Advantage Actor-Critic (A2C)
训练价值网络:reinforce使用蒙特卡洛方法直接求出了所有 u t u_t ut,从而可以直接训练 v π ( s ) v_{\pi}(s) vπ(s)而在 a c t o r − c r i t i c actor-critic actor−critic中并未使用蒙特卡洛方法,我们依据贝尔曼方程进行自举训练。
V π ( s t ) = E A t , S t + 1 [ R t + γ ⋅ V π ( S t + 1 ) ∣ S t = s t ] = E A t [ E S t + 1 [ R t + γ ⋅ V π ( S t + 1 ) ∣ S t = s t , A t ] ∣ S t = s t ] \begin{aligned} V_\pi\left(s_t\right)&=\mathbb{E}_{A_t, S_{t+1}}\left[R_t+\gamma \cdot V_\pi\left(S_{t+1}\right) \mid S_t=s_t\right]\\ &= \Bbb E_{A_t}[\Bbb E_{S_{t+1}}[R_{t}+\gamma \cdot V_{\pi}(S_{t+1})\mid S_t=s_t,A_t] \mid S_t=s_t] \end{aligned} Vπ(st)=EAt,St+1[Rt+γ⋅Vπ(St+1)∣St=st]=EAt[ESt+1[Rt+γ⋅Vπ(St+1)∣St=st,At]∣St=st]
从初始状态 s t s_t st出发,依据策略 π ( A ∣ S ) \pi(A\mid S) π(A∣S)选取动作 a t a_t at,再依据状态转移概率 p ( S t + 1 ∣ A t , S t ) p(S_{t+1}\mid A_t,S_t) p(St+1∣At,St),选中下一刻状态 s t + 1 s_{t+1} st+1,得出 r t r_{t} rt.
则 y t = r t + v π ( s t + 1 ; w ) y_t=r_t+v_{\pi}(s_{t+1};\boldsymbol{w}) yt=rt+vπ(st+1;w)
具体这样更新价值网络参数 w \boldsymbol{w} w 。定义损失函数
L ( w ) ≜ 1 2 [ v ( s t ; w ) − y t ^ ] 2 . L(\boldsymbol{w}) \triangleq \frac{1}{2}\left[v\left(s_t ; \boldsymbol{w}\right)-\widehat{y_t}\right]^2 . L(w)≜21[v(st;w)−yt ]2.
设 v ^ t ≜ v ( s t ; w ) \widehat{v}_t \triangleq v\left(s_t ; \boldsymbol{w}\right) v t≜v(st;w) 。损失函数的梯度是:
∇ w L ( w ) = ( v ^ t − y ^ t ) ⏟ TD 误差 δ t ⋅ ∇ w v ( s t ; w ) . \nabla_{\boldsymbol{w}} L(\boldsymbol{w})=\underbrace{\left(\widehat{v}_t-\widehat{y}_t\right)}_{\text {TD 误差 } \delta_t} \cdot \nabla_{\boldsymbol{w}} v\left(s_t ; \boldsymbol{w}\right) . ∇wL(w)=TD 误差 δt (v t−y t)⋅∇wv(st;w).
定义 TD 误差为 δ t ≜ v ^ t − y ^ t \delta_t \triangleq \widehat{v}_t-\widehat{y}_t δt≜v t−y t 。做一轮梯度下降更新 w : \boldsymbol{w}: w:
w ← w − α ⋅ δ t ⋅ ∇ w v ( s t ; w ) . \boldsymbol{w} \leftarrow \boldsymbol{w}-\alpha \cdot \delta_t \cdot \nabla_{\boldsymbol{w}} v\left(s_t ; \boldsymbol{w}\right) . w←w−α⋅δt⋅∇wv(st;w).
训练策略网络:贝尔曼公式:
Q π ( s t , a t ) = E S t + 1 ∼ p ( ⋅ ∣ s t , a t ) [ R t + γ ⋅ V π ( S t + 1 ) ] . Q_\pi\left(s_t, a_t\right)=\mathbb{E}_{S_{t+1} \sim p\left(\cdot \mid s_t, a_t\right)}\left[R_t+\gamma \cdot V_\pi\left(S_{t+1}\right)\right] . Qπ(st,at)=ESt+1∼p(⋅∣st,at)[Rt+γ⋅Vπ(St+1)].
把近似策略梯度 g ( s t , a t ; θ ) \boldsymbol{g}\left(s_t, a_t ; \boldsymbol{\theta}\right) g(st,at;θ) 中的 Q π ( s t , a t ) Q_\pi\left(s_t, a_t\right) Qπ(st,at) 替换成上面的期望, 得到:
g ( s t , a t ; θ ) = [ Q π ( s t , a t ) − V π ( s t ) ] ⋅ ∇ θ ln π ( a t ∣ s t ; θ ) = [ E S t + 1 [ R t + γ ⋅ V π ( S t + 1 ) ] − V π ( s t ) ] ⋅ ∇ θ ln π ( a t ∣ s t ; θ ) . \begin{aligned} \boldsymbol{g}\left(s_t, a_t ; \boldsymbol{\theta}\right) & =\left[Q_\pi\left(s_t, a_t\right)-V_\pi\left(s_t\right)\right] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}\right) \\ & =\left[\mathbb{E}_{S_{t+1}}\left[R_t+\gamma \cdot V_\pi\left(S_{t+1}\right)\right]-V_\pi\left(s_t\right)\right] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}\right) . \end{aligned} g(st,at;θ)=[Qπ(st,at)−Vπ(st)]⋅∇θlnπ(at∣st;θ)=[ESt+1[Rt+γ⋅Vπ(St+1)]−Vπ(st)]⋅∇θlnπ(at∣st;θ).
当智能体执行动作 a t a_t at 之后, 环境给出新的状态 s t + 1 s_{t+1} st+1 和奖励 r t r_t rt; 利用 s t + 1 s_{t+1} st+1 和 r t r_t rt 对上面的期望做蒙特卡洛近似, 得到:
g ( s t , a t ; θ ) ≈ [ r t + γ ⋅ V π ( s t + 1 ) − V π ( s t ) ] ⋅ ∇ θ ln π ( a t ∣ s t ; θ ) . \boldsymbol{g}\left(s_t, a_t ; \boldsymbol{\theta}\right) \approx\left[r_t+\gamma \cdot V_\pi\left(s_{t+1}\right)-V_\pi\left(s_t\right)\right] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}\right) . g(st,at;θ)≈[rt+γ⋅Vπ(st+1)−Vπ(st)]⋅∇θlnπ(at∣st;θ).
进一步把状态价值函数 V π ( s ) V_\pi(s) Vπ(s) 替换成价值网络 v ( s ; w ) v(s ; \boldsymbol{w}) v(s;w), 得到:
g ~ ( s t , a t ; θ ) ≜ [ r t + γ ⋅ v ( s t + 1 ; w ) ⏟ T D 目标 y ^ t − v ( s t ; w ) ] ⋅ ∇ θ ln π ( a t ∣ s t ; θ ) \tilde{\boldsymbol{g}}\left(s_t, a_t ; \boldsymbol{\theta}\right) \triangleq[\underbrace{r_t+\gamma \cdot v\left(s_{t+1} ; \boldsymbol{w}\right)}_{\mathrm{TD} \text { 目标 } \hat{y}_t}-v\left(s_t ; \boldsymbol{w}\right)] \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}\right) g~(st,at;θ)≜[TD 目标 y^t rt+γ⋅v(st+1;w)−v(st;w)]⋅∇θlnπ(at∣st;θ)
前面定义了 TD 目标和 TD 误差:
y ^ t ≜ r t + γ ⋅ v ( s t + 1 ; w ) 和 δ t ≜ v ( s t ; w ) − y ^ t . \widehat{y}_t \triangleq r_t+\gamma \cdot v\left(s_{t+1} ; \boldsymbol{w}\right) \quad \text { 和 } \quad \delta_t \triangleq v\left(s_t ; \boldsymbol{w}\right)-\widehat{y}_t . y t≜rt+γ⋅v(st+1;w) 和 δt≜v(st;w)−y t.
因此, 可以把 g ~ \tilde{\boldsymbol{g}} g~ 写成:
g ~ ( s t , a t ; θ ) ≜ − δ t ⋅ ∇ θ ln π ( a t ∣ s t ; θ ) . \tilde{\boldsymbol{g}}\left(s_t, a_t ; \boldsymbol{\theta}\right) \triangleq-\delta_t \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}\right) . g~(st,at;θ)≜−δt⋅∇θlnπ(at∣st;θ).
g ~ \tilde{\boldsymbol{g}} g~ 是 g \boldsymbol{g} g 的近似,所以也是策略梯度 ∇ θ J ( θ ) \nabla_{\boldsymbol{\theta}} J(\boldsymbol{\theta}) ∇θJ(θ) 的近似。用 g ~ \tilde{\boldsymbol{g}} g~ 更新策略网络参数 θ \boldsymbol{\theta} θ :
θ ← θ + β ⋅ g ~ ( s t , a t ; θ ) . \boldsymbol{\theta} \leftarrow \boldsymbol{\theta}+\beta \cdot \tilde{\boldsymbol{g}}\left(s_t, a_t ; \boldsymbol{\theta}\right) . θ←θ+β⋅g~(st,at;θ).
训练流程。设当前策略网络参数是 θ now \boldsymbol{\theta}_{\text {now }} θnow , 价值网络参数是 w now \boldsymbol{w}_{\text {now }} wnow 。执行下面的步骤, 将参数更新成 θ new \theta_{\text {new }} θnew 和 w new \boldsymbol{w}_{\text {new }} wnew :
- 观测到当前状态 s t s_t st, 根据策略网络做决策: a t ∼ π ( ⋅ ∣ s t ; θ now ) a_t \sim \pi\left(\cdot \mid s_t ; \boldsymbol{\theta}_{\text {now }}\right) at∼π(⋅∣st;θnow ), 并让智能体执行动作 a t a_t at 。
- 从环境中观测到奖励 r t r_t rt 和新的状态 s t + 1 s_{t+1} st+1 。
- 让价值网络打分:
v ^ t = v ( s t ; w now ) 和 v ^ t + 1 = v ( s t + 1 ; w now ) \widehat{v}_t=v\left(s_t ; \boldsymbol{w}_{\text {now }}\right) \quad \text { 和 } \quad \widehat{v}_{t+1}=v\left(s_{t+1} ; \boldsymbol{w}_{\text {now }}\right) v t=v(st;wnow ) 和 v t+1=v(st+1;wnow ) - 计算 TD 目标和 TD 误差:
y ^ t = r t + γ ⋅ v ^ t + 1 和 δ t = v ^ t − y ^ t . \widehat{y}_t=r_t+\gamma \cdot \widehat{v}_{t+1} \quad \text { 和 } \quad \delta_t=\widehat{v}_t-\widehat{y}_t . y t=rt+γ⋅v t+1 和 δt=v t−y t. - 更新价值网络:
w new ← w now − α ⋅ δ t ⋅ ∇ w v ( s t ; w now ) . \boldsymbol{w}_{\text {new }} \leftarrow \boldsymbol{w}_{\text {now }}-\alpha \cdot \delta_t \cdot \nabla_{\boldsymbol{w}} v\left(s_t ; \boldsymbol{w}_{\text {now }}\right) . wnew ←wnow −α⋅δt⋅∇wv(st;wnow ). - 更新策略网络:
θ new ← θ now − β ⋅ δ t ⋅ ∇ θ ln π ( a t ∣ s t ; θ now ) . \boldsymbol{\theta}_{\text {new }} \leftarrow \boldsymbol{\theta}_{\text {now }}-\beta \cdot \delta_t \cdot \nabla_{\boldsymbol{\theta}} \ln \pi\left(a_t \mid s_t ; \boldsymbol{\theta}_{\text {now }}\right) . θnew ←θnow −β⋅δt⋅∇θlnπ(at∣st;θnow ).
相关文章:
深度强化学习(九)(改进策略梯度)
深度强化学习(九)(改进策略梯度) 一.带基线的策略梯度方法 Theorem: 设 b b b 是任意的函数, b b b与 A A A无关。把 b b b 作为动作价值函数 Q π ( S , A ) Q_\pi(S, A) Qπ(S,A) 的基线, 对策略梯度没有影响: ∇ θ J …...

Oracle修改Number类型精度报错:ORA-01440
修改Number类型的字段的精度SQL ALTER TABLE XXXX MODIFY RATE NUMBER(30,6); 如果表已经存在数据,报错信息如下: ORA-01440: column to be modified must be empty to decrease precision or scale 废话不多说,解决方案如下:…...

美团到店-后端开发一面
1. 介绍一下spring的两大核心思想 2. 介绍一下java的代理,以及动态代理和静态代理的区别 3. spring动态代理是如何生成的,jdk动态代理和cglib的区别 4. 介绍一下synchronized关键字、以及synchronized锁和lock的区别 5. 讲一下java中synchronized的锁升级…...

面试算法-77-括号生成
题目 数字 n 代表生成括号的对数,请你设计一个函数,用于能够生成所有可能的并且 有效的 括号组合。 示例 1: 输入:n 3 输出:[“((()))”,“(()())”,“(())()”,“()(())”,“()()()”] 解 class Solution {publ…...

webpack5零基础入门-12搭建开发服务器
1.目的 每次写完代码都需要手动输入指令才能编译代码,太麻烦了,我们希望一切自动化 2.安装相关包 npm install --save-dev webpack-dev-server 3.添加配置 在webpack.config.js中添加devServer相关配置 /**开发服务器 */devServer: {host: localhos…...

opengl日记10-opengl使用多个纹理示例
文章目录 环境代码CMakeLists.txt文件内容不变。fragmentShaderSource.fsvertexShaderSource.vsmain.cpp 总结 环境 系统:ubuntu20.04opengl版本:4.6glfw版本:3.3glad版本:4.6cmake版本:3.16.3gcc版本:10.…...
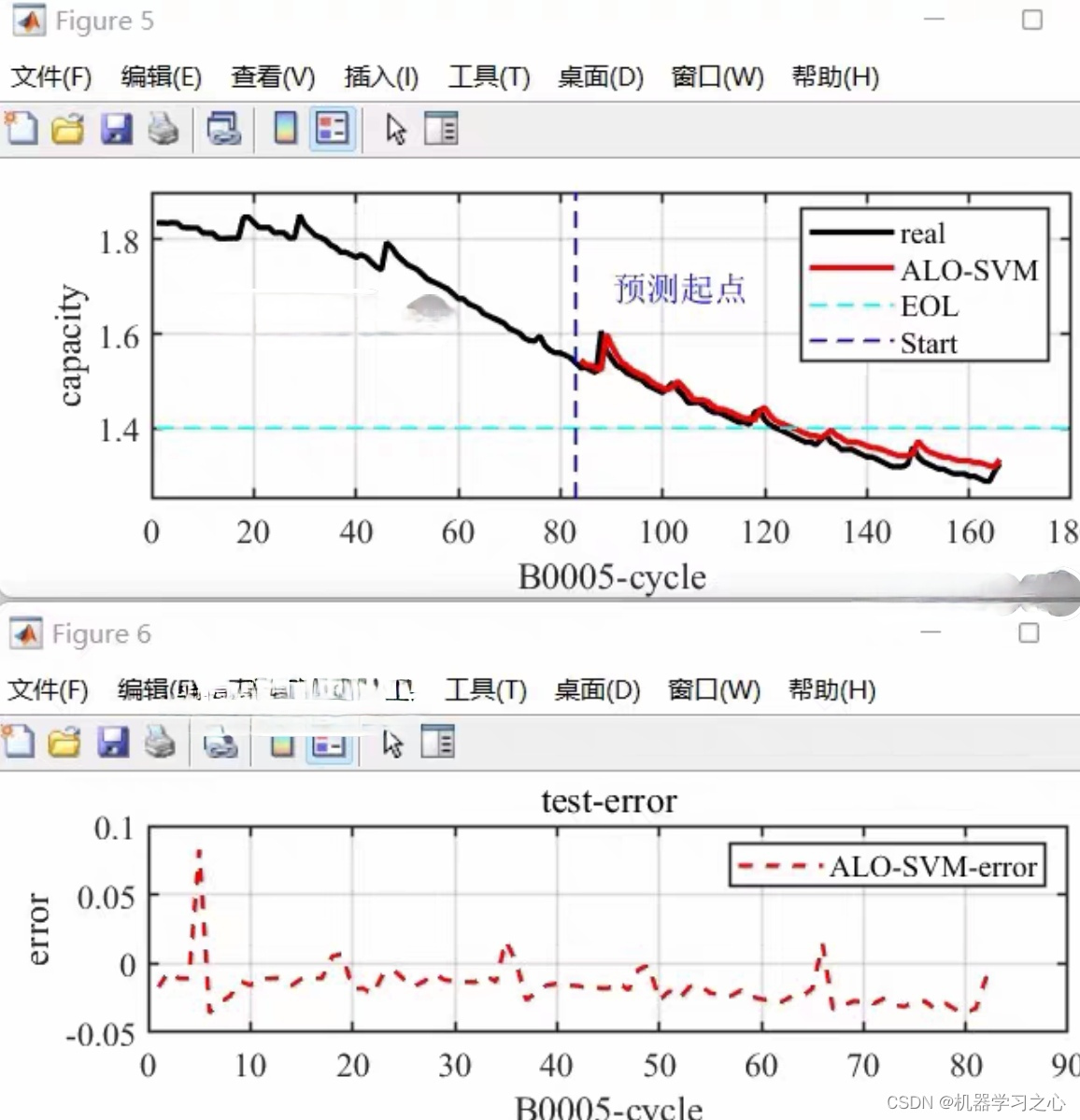
锂电池寿命预测 | Matlab基于ALO-SVR蚁狮优化支持向量回归的锂离子电池剩余寿命预测
目录 预测效果基本介绍程序设计参考资料 预测效果 基本介绍 锂电池寿命预测 | Matlab基于ALO-SVR蚁狮优化支持向量回归的锂离子电池剩余寿命预测 基于蚁狮优化和支持向量回归的锂离子电池剩余寿命预测: 1、提取NASA数据集的电池容量,以历史容量作为输入,…...

动态规划15 | ● 392.判断子序列 ● *115.不同的子序列
392.判断子序列 https://programmercarl.com/0392.%E5%88%A4%E6%96%AD%E5%AD%90%E5%BA%8F%E5%88%97.html 考点 子序列问题 我的思路 dp[i][j]的含义是,两个序列分别取到下标为i和j的时候,他们是否满足前者是后者的子序列,满足为True&#x…...

APP UI自动化测试思路总结
首先想要说明一下,APP自动化测试可能很多公司不用,但也是大部分自动化测试工程师、高级测试工程师岗位招聘信息上要求的,所以为了更好的待遇,我们还是需要花时间去掌握的,毕竟谁也不会跟钱过不去。 接下来,…...
)
Codeforces Round 936 (Div. 2)
C. Tree Cutting 题意:给定一棵树,需要删除 k 条边,使得 k1 个联通块中的最小结点数最大。求出这个最大值 思路:求最小值最大--想到二分答案--然后深搜满足条件的连通块是否大于k即可 #include<iostream> #include<al…...
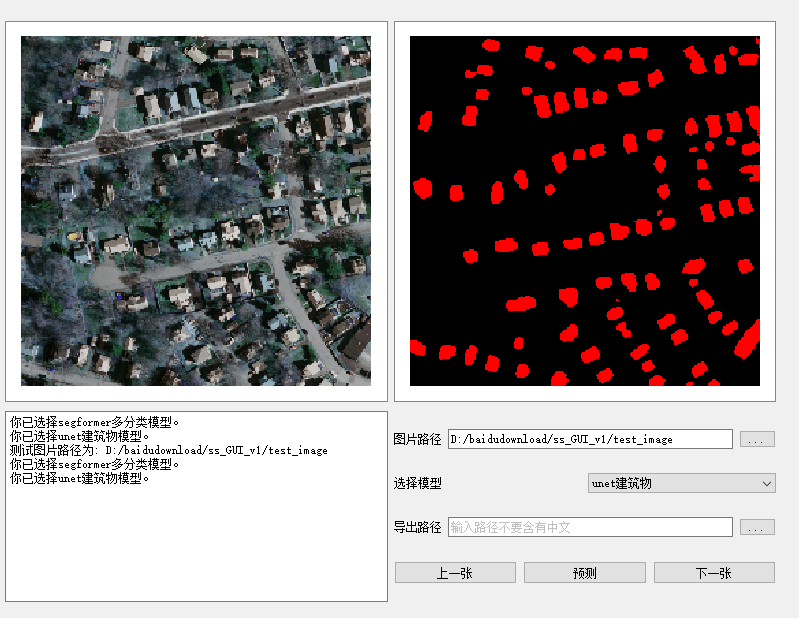
yolov6实现遥感影像目标识别|以DIOR数据集为例
1 目标检测是计算机视觉领域中的一项重要任务,它的目标是在图像或视频中检测出物体的位置和类别。YOLO(You Only Look Once)是一系列经典的目标检测算法,最初由Joseph Redmon等人于2016年提出。YOLO算法具有快速、简单、端到端的特…...

stable-diffusion-electron-clickstart 支持windows AMD显卡
前言 使用vue3 vite electron element-plus构建,正好学习下electrongithub stable-diffusion “画境导航者” 启动器 简介 stable-diffusion “画境导航者” 启动器支持功能 一键启动打开文件夹(tmp、txt2img-images)等模型所在文件夹&…...

ES进程除了kill之外,有什么优雅关闭的方式吗?
问题 Linux环境中,Elasticsearch 8的进程除了kill之外,有什么优雅关闭的方式吗? 具体实施方式 在Linux环境中,Elasticsearch(ES)进程可以通过多种方式实现优雅关闭,这种方式允许它完成必要的…...
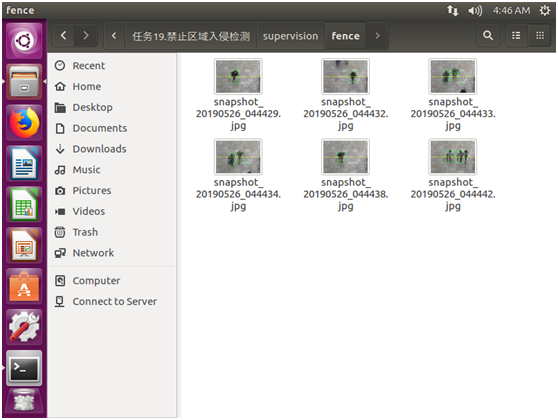
院子摄像头的监控
院子摄像头的监控和禁止区域入侵检测相比,多了2个功能:1)如果检测到有人入侵,则把截图保存起来,2)如果检测到有人入侵,则向数据库插入一条事件数据。 打开checkingfence.py,添加如下…...

SpringBoot3使用响应Result类返回的响应状态码为406
Resolved [org.springframework.web.HttpMediaTypeNotAcceptableException: No acceptable representation] 解决方法:Result类上加上Data注解...
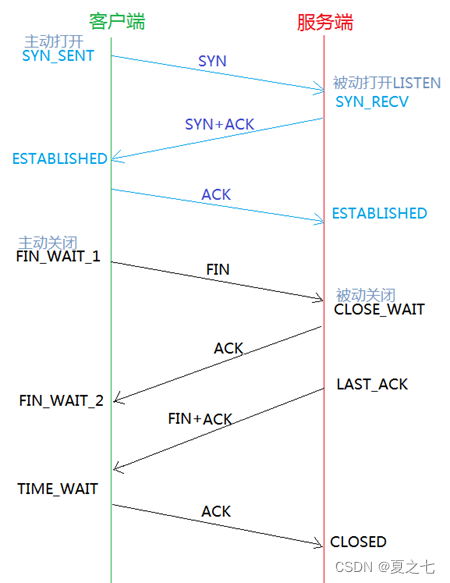
基础:TCP四次挥手做了什么,为什么要挥手?
1. TCP 四次挥手在做些什么 1. 第一次挥手 : 1)挥手作用:主机1发送指令告诉主机2,我没有数据发送给你了。 2)数据处理:主机1(可以是客户端,也可以是服务端),…...

Android Studio实现内容丰富的安卓校园二手交易平台(带聊天功能)
获取源码请点击文章末尾QQ名片联系,源码不免费,尊重创作,尊重劳动 项目编号083 1.开发环境android stuido jdk1.8 eclipse mysql tomcat 2.功能介绍 安卓端: 1.注册登录 2.查看二手商品列表 3.发布二手商品 4.商品详情 5.聊天功能…...

第十一届蓝桥杯省赛第一场真题
2065. 整除序列 - AcWing题库 #include <bits/stdc.h> using namespace std; #define int long long//记得开long long void solve(){int n;cin>>n;while(n){cout<<n<< ;n/2;} } signed main(){int t1;while(t--)solve();return 0; } 2066. 解码 - …...
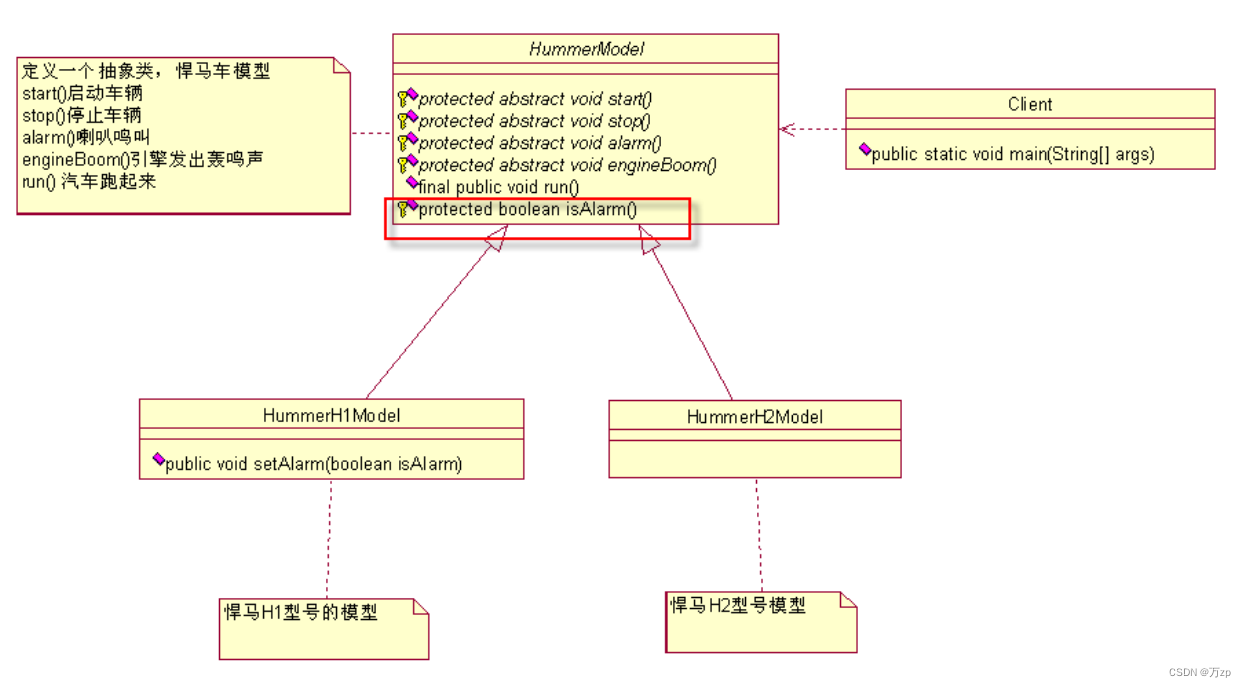
设计模式 模板方法模式
01.如果接到一个任务,要求设计不同型号的悍马车 02.设计一个悍马车的抽象类(模具,车模) public abstract class HummerModel {/** 首先,这个模型要能够被发动起来,别管是手摇发动,还是电力发动…...
【STM32嵌入式系统设计与开发】——6矩阵按键应用(4x4)
这里写目录标题 一、任务描述二、任务实施1、SingleKey工程文件夹创建2、函数编辑(1)主函数编辑(2)LED IO初始化函数(LED_Init())(3)开发板矩阵键盘IO初始化(ExpKeyBordInit())&…...

DMA-330地址空间限制与扩展方案解析
1. DMA-330地址空间限制解析DMA-330作为Arm CoreLink系列中的直接内存访问控制器,其物理寻址能力直接由AxADDR信号宽度决定。这个32位地址总线宽度意味着它原生仅支持4GB(2^32字节)的物理地址空间访问。在实际嵌入式系统设计中,这…...

从Office功能区的“局外人“到“掌控者“:Office RibbonX Editor深度指南
从Office功能区的"局外人"到"掌控者":Office RibbonX Editor深度指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/g…...

告别道路预测老套路:用ParkPredict+模型思路,解决停车场里的‘鬼探头’难题
破解泊车场景预测困局:ParkPredict模型的技术革新与实践停车场里的每一次转向、倒车和避让,都是对自动驾驶系统预测能力的极限挑战。与开放道路的规则明确不同,这里没有清晰的车道线指引,没有统一的行驶方向,只有随时可…...

雪球网md5__1038参数逆向解析与Node.js复现
1. 这不是“破解”,而是对前端加密逻辑的常规逆向还原你打开雪球网任意一只股票详情页,F12 打开开发者工具,切到 Network 面板,刷新页面——很快就能在 XHR 请求里捕获到类似这样的接口:https://xueqiu.com/stock/cube…...
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

基于ATtiny84的智能冰箱监控器:低功耗温度与门状态监测方案
1. 项目概述:一个装在树莓派盒子里的智能冰箱管家如果你家里有台老冰箱,或者对食物储存温度特别在意,总担心冰箱门没关严或者突然断电导致内部升温,那么这个自己动手做的“冰箱看门狗”项目就太适合你了。它本质上是一个高度定制化…...
)
Mysql:事务管理(中)
在前面的章节中,我们提到了 MVCC(多版本并发控制),它巧妙地通过“版本快照”解决了“读-写”冲突,实现了非阻塞读。但如果两个事务同时执行 UPDATE 操作修改同一行数据,即 写-写(Write-Write&am…...
)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)在游戏开发中,我们经常会遇到这样的场景:玩家拾取金币后,需要更新UI、播放音效、解锁成就、保存数据……如果把这些逻辑全部写在金币拾取的代…...
)
告别杂乱!用FileMenu Tools 8.4.2一键清理Windows 11右键菜单(附隐藏技巧)
Windows 11右键菜单精简指南:用FileMenu Tools打造高效工作流每次在文件上点击右键时,那个缓慢弹出的冗长菜单是否让你感到烦躁?随着安装的软件越来越多,Windows的右键菜单往往会变得臃肿不堪,严重影响工作效率。今天&…...

终极指南:Windows 10完美安装PL2303驱动,解决老旧USB转串口芯片兼容性问题
终极指南:Windows 10完美安装PL2303驱动,解决老旧USB转串口芯片兼容性问题 【免费下载链接】pl2303-win10 Windows 10 driver for end-of-life PL-2303 chipsets. 项目地址: https://gitcode.com/gh_mirrors/pl/pl2303-win10 你是否还在为Windows…...