自动驾驶的几种名词
1. 自适应巡航控制(ACC)
自适应巡航控制(Adaptive Cruise Control,ACC)是一种汽车驾驶辅助系统,它可以根据前方车辆的速度和距离自动调整车辆的速度,以保持与前车的安全距离。ACC系统由控制层和执行层组成。控制层包括加速度计算模块、速度控制模块和距离控制模块,用于计算车辆的加速度、控制车辆的速度和距离。执行层主要包括加减速控制模块,用于控制车辆的加减速操作1。
自适应巡航控制系统的试验规程包括实验准备、试验场地要求、试验环境要求、试验设备要求、试验方法和目标车辆的不同试验场景。试验准备包括准备试验场地、准备试验环境和准备试验设备。试验场地要求包括静止试验场景、低速试验场景和减速试验场景。试验环境要求包括50%横向重叠率试验。试验设备要求根据具体的试验规程而定。试验方法包括对目标车辆进行不同场景的测试,以验证自适应巡航控制系统的性能和安全性
2. 自动紧急制动(AEB)
自动紧急制动(AEB)是一种主动安全功能,它基于环境感知传感器(如毫米波雷达或视觉摄像头)来感知前方可能发生的碰撞风险,并通过系统自动触发执行机构(如电子稳定程序ESP)来实施制动,以避免碰撞或减轻碰撞程度。
在高速公路上,AEB系统需要具备相应的控制策略来应对可能发生的事故。当驾驶员意识到危险时,由于车速过快无法控制车辆,AEB系统需要能够保证行驶的安全。系统会首先通过报警来提醒驾驶员潜在的危险。如果驾驶员在反应时间内没有任何反应,系统会启动第二次警示,例如突然的制动或安全带收紧,此时制动器将调至预制动状态。如果驾驶员仍然没有反应,系统将自动实施制动。
总结来说,自动紧急制动(AEB)是一种通过感知前方碰撞风险并自动实施制动的主动安全功能,旨在避免碰撞或减轻碰撞程度。在高速公路上,AEB系统需要具备相应的控制策略来应对可能发生的事故。
3. 车道保持辅助(LKA)
车道保持辅助系统(Lane Keeping Assistance System,简称LKA)是一种车辆安全辅助系统,旨在帮助驾驶员保持车辆在车道内的行驶。LKA系统通过使用摄像头或其他传感器来监测车辆与车道之间的位置关系,并根据需要采取措施来纠正车辆的行驶轨迹。
根据ISO 11270标准,LKA系统需要满足一定的性能要求和测试程序。测试通常在一段直路上进行,车辆以特定的速度行驶。在测试过程中,车辆可以在车道中央行驶,也可以沿着与偏离车道时将穿过的车道标记相反的车道标记行驶。
LKA系统的工作原理通常包括以下几个步骤:
(1) 感知:通过摄像头或其他传感器监测车辆与车道之间的位置关系。
(2) 分析:分析车辆的位置和车道标记的位置,判断车辆是否偏离了车道。
(3) 反馈:如果车辆偏离了车道,LKA系统会采取措施来纠正车辆的行驶轨迹,例如通过调整方向盘或应用制动力来将车辆重新引导回车道。
LKA系统的目标是提供额外的安全保障,帮助驾驶员保持车辆在车道内的行驶,减少意外事故的发生。然而,LKA系统并不是完全自动驾驶系统,驾驶员仍然需要保持警觉并随时准备接管车辆的控制。
4. 高速公路辅助驾驶(HWA)
高速公路辅助驾驶(High Way Assist,简称HWA)是一种车辆自动驾驶辅助系统,旨在提供高速公路上的安全和便利。HWA功能场景设计包括纵向和横向两个方面。
(1) 纵向功能场景设计:
a. 前车逐渐刹停:当前车逐渐减速停下时,HWA会控制车辆跟随前车静止,并保持与前车的合适距离(通常为2-3米)1。
b. 前车起步驶离:当前车在一定时间内(通常为60秒,可调整)重新起步离开时,HWA会控制车辆主动跟随前车驶离。
(2) 横向功能场景设计:
a. 居中保持:HWA会通过车辆的传感器和控制系统,确保车辆在高速公路上保持在车道的中心位置,避免偏离2。
b. 无车道线时跟随前车轨迹:当车辆行驶在没有车道线的道路上时,HWA会通过识别前车的轨迹,控制车辆跟随前车的行驶路径。
c. 对卡车偏离:HWA会监测车辆与卡车之间的距离和相对位置,当车辆偏离卡车时,HWA会发出警告并采取控制措施,确保车辆保持在安全的位置。
d. 横向override:当驾驶员主动操作方向盘时,HWA会立即停止对车辆的横向控制,将控制权交还给驾驶员。
e. 脱手报警:当驾驶员长时间不接触方向盘或脱手时,HWA会发出警报提醒驾驶员重新接管车辆的控制。
总之,高速公路辅助驾驶(HWA)是一种车辆自动驾驶辅助系统,通过纵向和横向的功能场景设计,提供高速公路上的安全和便利。
5. 导航辅助驾驶(NOA)
导航辅助驾驶(NOA)是一种智能驾驶技术,旨在通过使用导航系统和传感器来提供驾驶员的辅助和支持。NOA可以在城区环境中为驾驶员提供导航指引、交通状况信息和驾驶建议,以减轻驾驶负担并提高驾驶的安全性和舒适性。
然而,与高速导航智能驾驶不同,城区导航智能驾驶在特定场景下可能会增加驾驶的紧张感。这是因为城区环境复杂多变,包括繁忙的交通、复杂的道路标志和交叉口等。因此,城区导航智能驾驶系统需要更高的精确度和反应速度,以应对这些挑战。
总之,导航辅助驾驶(NOA)是一项城区智能驾驶技术,旨在提供驾驶员的辅助和支持,但在城区环境中可能会增加驾驶的紧张感。
相关文章:

自动驾驶的几种名词
1. 自适应巡航控制(ACC) 自适应巡航控制(Adaptive Cruise Control,ACC)是一种汽车驾驶辅助系统,它可以根据前方车辆的速度和距离自动调整车辆的速度,以保持与前车的安全距离。ACC系统由控制层和…...
)
华为全套企业管理资料合集(21专题)
华为全套企业管理资料合集-知识星球下载 1.绩效考核 华为内训绝密资料:绩效管理与绩效考核.ppt 华为绩效管理与绩效考核制度.docx 华为公司实用性各种绩效图表汇总.doc 华为公司考勤管理制度.doc 华为IPD模式中跨部门团队成员的考核激励制度.doc 2.企业管理 华为公司人力资源…...
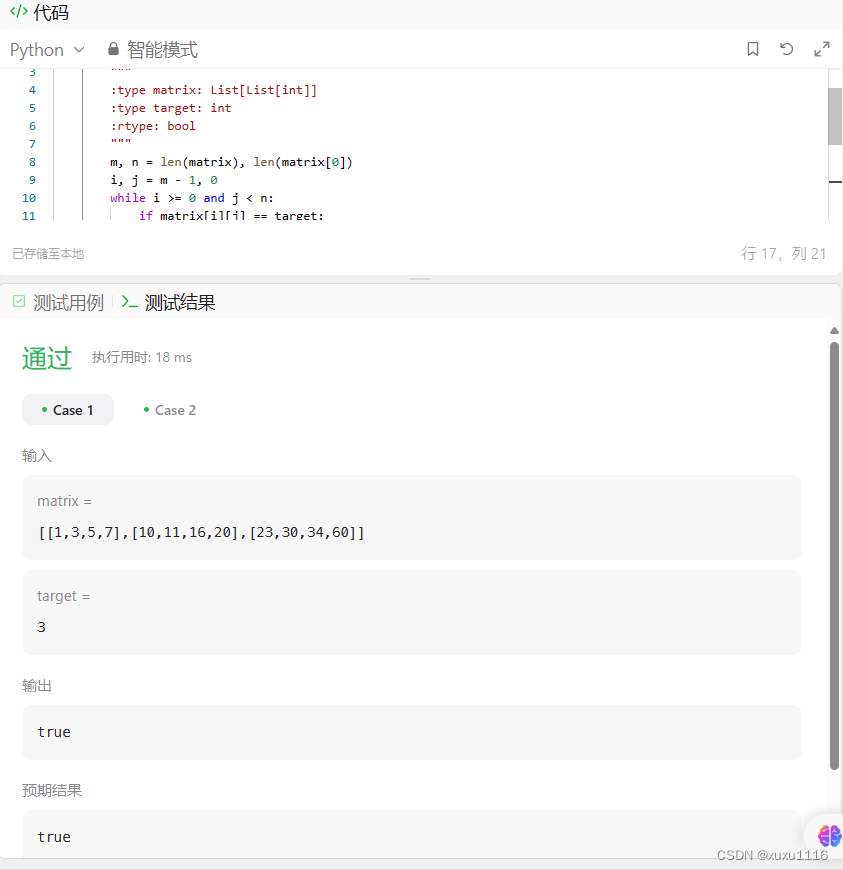
LeetCode Python - 74. 搜索二维矩阵
目录 题目描述解法方法一:二分查找方法二:从左下角或右上角搜索 运行结果方法一方法二 题目描述 给你一个满足下述两条属性的 m x n 整数矩阵: 每行中的整数从左到右按非严格递增顺序排列。每行的第一个整数大于前一行的最后一个整数。 给…...

如何安全地添加液氮到液氮罐中
液氮是一种极低温的液体,它在许多领域广泛应用,但在处理液氮时需谨慎小心。添加液氮到液氮罐中是一个常见的操作,需要遵循一些安全准则以确保操作人员的安全和设备的完整性。 选择合适的液氮容器 选用专业设计用于存储液氮的容器至关重要。…...
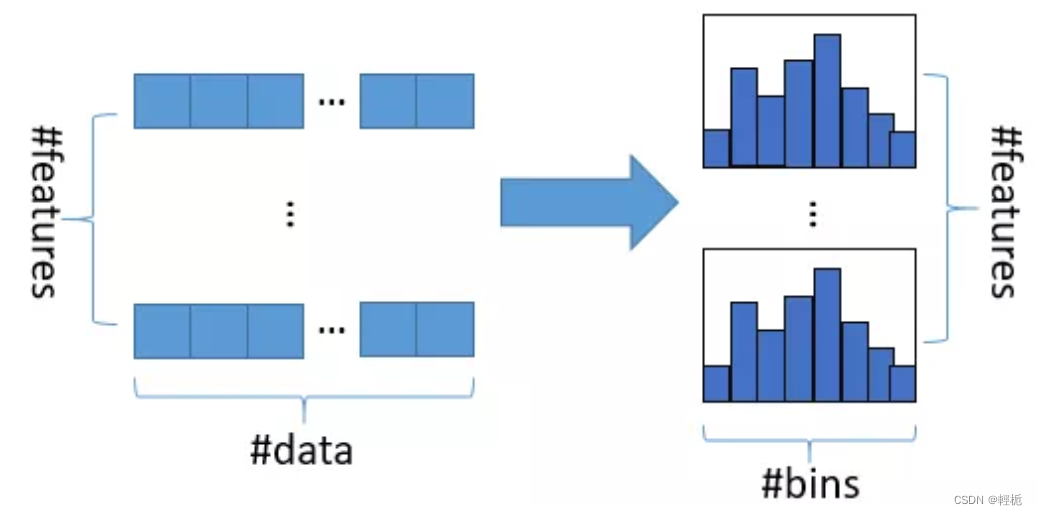
LGBM算法 原理
简介 GBDT (Gradient Boosting Decision Tree) 是机器学习中一个长盛不衰的模型,其主要思想是利用弱分类器(决策树)迭代训练以得到最优模型,该模型具有训练效果好、不易过拟合等优点。GBDT不仅在工业界应用广泛,通常被…...

【WPF应用5】WPF中的TextBlock控件:属性与事件详解及示例
在WPF(Windows Presentation Foundation)开发中,TextBlock控件是一个常用的元素,用于显示静态或动态文本内容。它提供了丰富的属性和事件,使得开发者能够灵活地控制文本的显示样式和响应用户的交互行为。本文将详细介绍…...
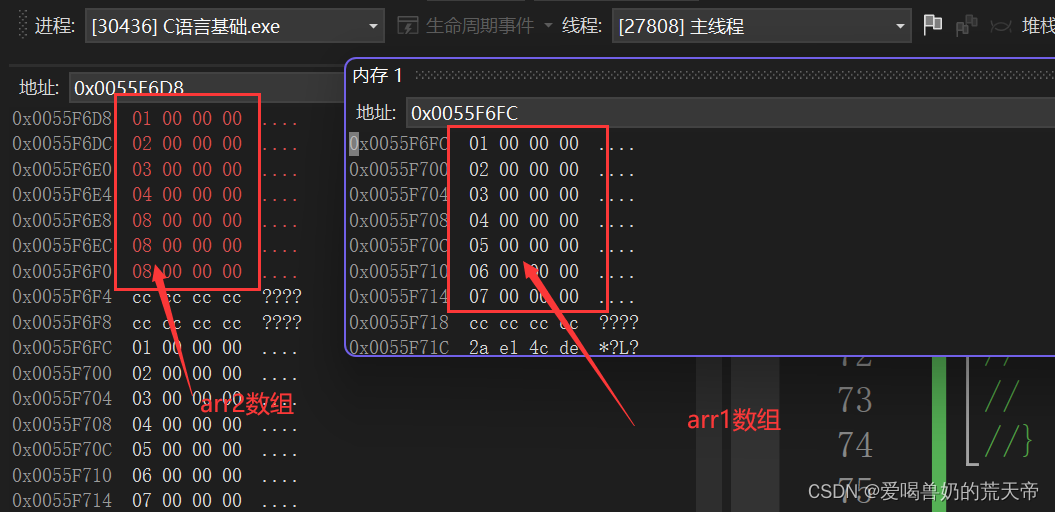
【C语言基础】:内存操作函数
文章目录 一、memcpy函数的使用和模拟实现1.1 memcpy函数的使用1.2 memcpy函数的模拟实现 二、memmove函数的使用和模拟实现2.1 memmove函数的使用2.2 memmove函数的模拟实现 三、memset函数的使用3.1 menset函数的使用 四、memcmp函数的使用4.1 memcmp函数的使用 学海无涯苦作…...
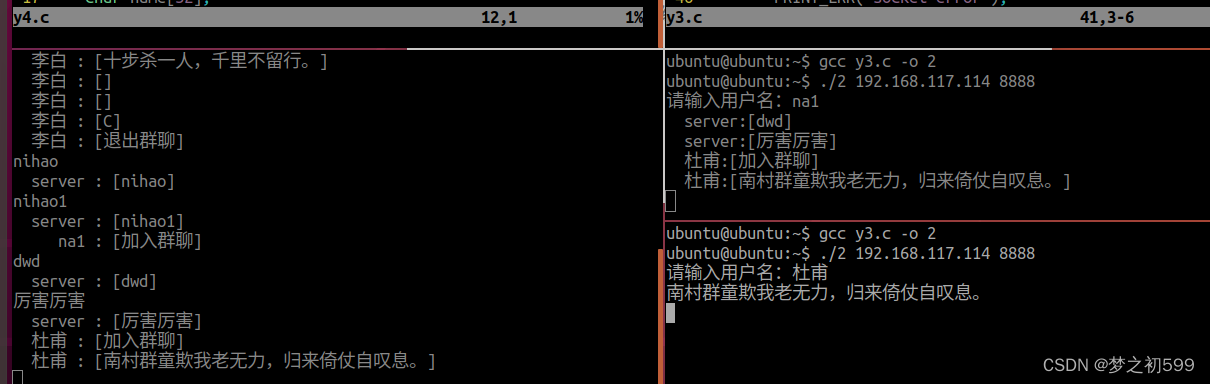
3.24作业
基于UDP的网络聊天室 项目需求: 如果有用户登录,其他用户可以收到这个人的登录信息如果有人发送信息,其他用户可以收到这个人的群聊信息如果有人下线,其他用户可以收到这个人的下线信息服务器可以发送系统信息 服务器端代码 #in…...

Excel双击单元格后弹窗输入日期
Step1. 在VBE界面新建一个窗体(Userform1),在窗体的工具箱的空白处右键,选中添加附件,勾选Calendar control 8.0,即可完成日历的添加。 PS:遗憾的是, Office 64 位没有官方的日期选择器控件。唯一的解决方案是使用Excel 的第三方日历。 参考链接:How to insert calen…...
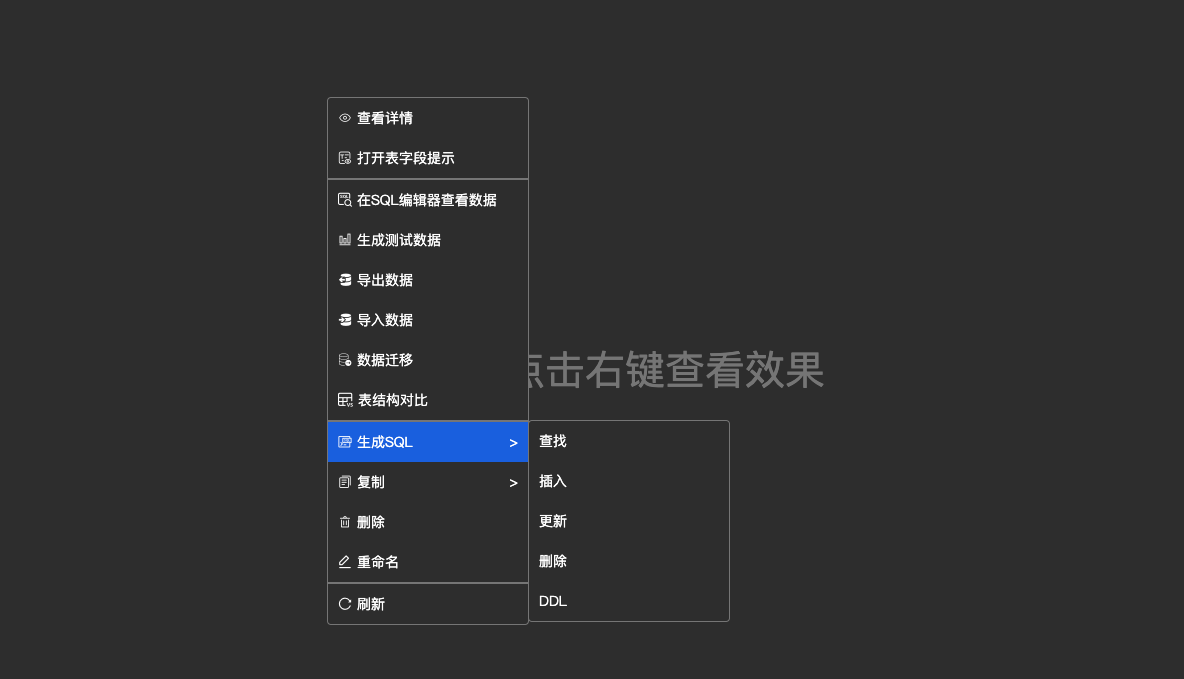
原生 HTML/CSS/JS 实现右键菜单和二级菜单
文章来源:www.huhailong.vip 站点 文章源地址:https://www.huhailong.vip/article/1764653112011841538 Demo效果演示地址 先看效果图 {{{width“auto” height“auto”}}} 需要注意的就是边界检测处理,到极端点击底部和右侧时如果不做处理会…...
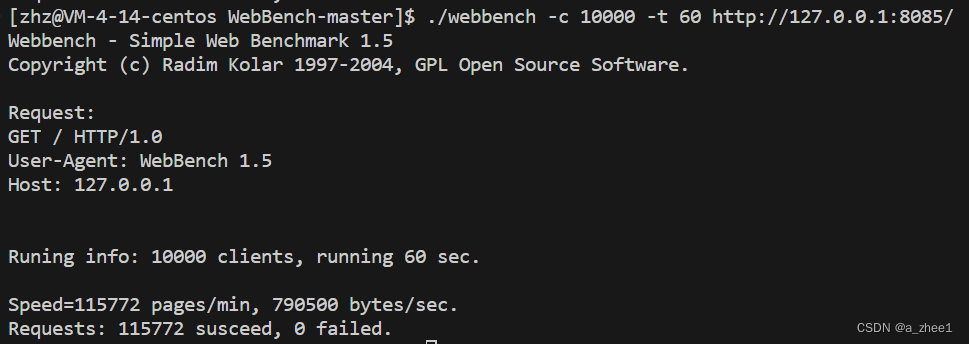
[项目前置]如何用webbench进行压力测试
测试软件 采用webbench进行服务器性能测试。 Webbench是知名的网站压力测试工具,它是由Lionbridge公司开发。 webbench的标准测试可以向我们展示服务器的两项内容: 每秒钟相应请求数 和 每秒钟传输数据量 webbench测试原理是,创建指定数…...
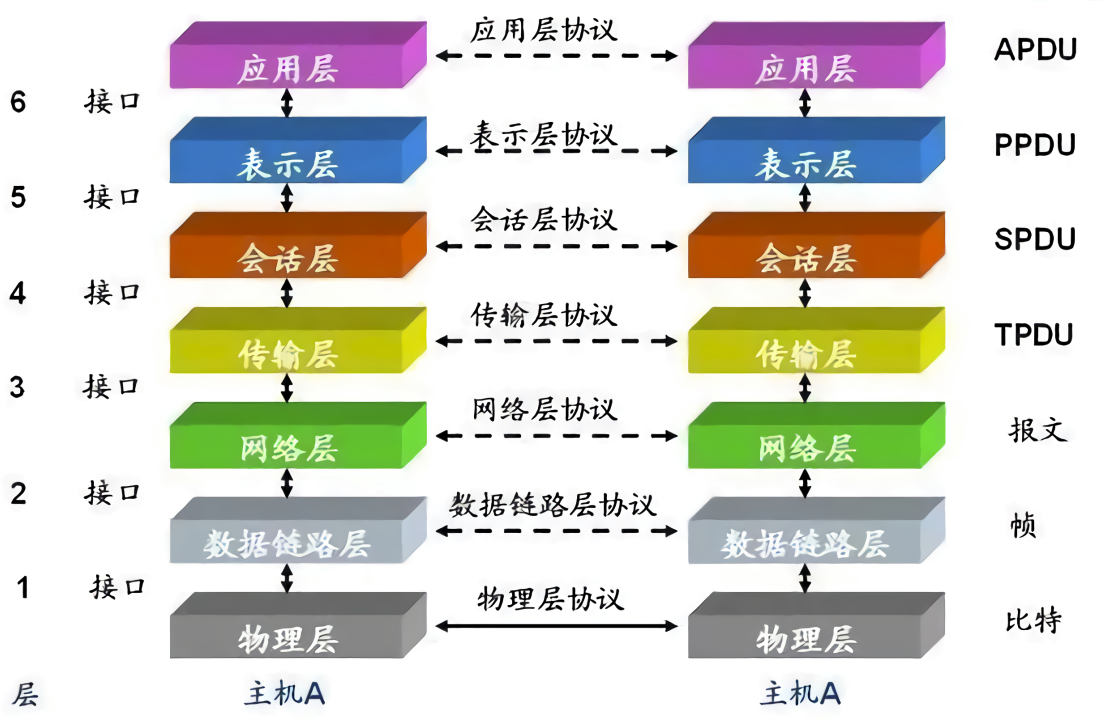
网络七层模型:理解网络通信的架构(〇)
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…...
)
format(C++20)
1. std::format format_01.cpp // g format_01.cpp -stdc20 #include <iostream> #include <string> #include <format>void test_01() {// 使用字符串填充std::cout << std::format("Hello {}!\n", "World"); // Hello World!…...
Ftrans安全数据摆渡系统 构建便捷的内外网数据交换通道
安全数据摆渡系统是一种设计用于解决内外网环境下,数据传输、管理、共享问题的安全系统,通过加密、访问控制等策略,提供安全可靠的数据传输和共享服务,尤其适用于对网络安全建设要求高的行业,比如研发型企业、党政机构…...

【云开发笔记No.14】持续交付、持续部署、持续交付流水线
一、持续交付 持续交付(Continuous Delivery)是一种软件开发方法论,它强调在开发过程中,软件可以在任何时间以最小的努力被部署到生产环境。其核心是确保代码更改在经过一系列自动化测试后,能够快速、安全地集成到主代…...

蓝桥杯练习07小兔子爬楼梯
小兔子爬楼梯 介绍 小兔子想去月球上旅行,假设小兔子拥有一个阶梯子,当你爬完层就可以到达月球,小兔子每次可以跳1或者2个台阶,小兔子有多少种跳法可以到达月球呢? 给定n是一个正整数,代表梯子的阶数&…...

Docker in Docker原理与实战
Docker in Docker (DinD) 是一种在Docker容器内部运行Docker的技术。它允许在一个Docker容器内部创建和管理其他的Docker容器,实现了一个容器内部的容器编排环境。本文将介绍Docker in Docker的原理,并给出一个实际的应用场景。 Docker in Docker的原理…...

Ruoyi若依框架下载流程详细解读(SpringBoot-Vue)
图解: 前端设计: 前端设计一个link文字连接或者按钮(ElementUI)Element - The worlds most popular Vue UI framework 前端请求设计: import request from /utils/request //下载示例模型定义语言的JSON export const…...

【深度学习】Pytorch中实现交叉熵损失计算的方式总结
在PyTorch中,计算交叉熵损失主要有以下几种方式,它们针对不同的场景和需求有不同的实现方式和适用范围: 1. nn.CrossEntropyLoss 类 这是最常用且方便的方法,特别适用于多分类任务。nn.CrossEntropyLoss 实际上是同时完成了 sof…...

机器学习:处理jira工单的分类问题
如何根据jira工单的category、reporter自动找到处理它的组呢?这是一个利用机器学习中knn算法的小实践. 目录 Knn算法 数据 示例 分割数据 选择Neighbors knn的优缺点 机器学习是一种技术,它的目的是给机器学习能力,让它们可以根据数据自己做决定,所以对于训练…...

如何高效处理大型AI模型:ONNX外部数据实战指南
如何高效处理大型AI模型:ONNX外部数据实战指南 【免费下载链接】onnx Open standard for machine learning interoperability 项目地址: https://gitcode.com/gh_mirrors/onn/onnx 当深度学习模型参数规模突破2GB时,你是否遇到过"protobuf太…...

Playwright安装本质:四层架构与跨平台部署详解
1. 为什么Playwright的安装过程比你想象中更值得深挖 “零基础入门:Playwright安装图解教程”——这个标题乍看平平无奇,像极了网上随手一搜就出十几页的“保姆级教程”。但我在带新人做自动化测试的三年里,亲手帮67位完全没写过Python、连终…...
)
Unity 2D游戏地图制作:从零上手Tile Palette的7个核心工具(附快捷键清单)
Unity 2D游戏地图制作:从零上手Tile Palette的7个核心工具(附快捷键清单)在独立游戏开发领域,2D游戏因其独特的艺术风格和相对较低的开发门槛,始终保持着旺盛的生命力。无论是复古风格的平台跳跃游戏,还是精…...

Selenium WebDriver协议层原理与稳定性实战
1. 这不是“又一个Selenium教程”——它解决的是你写完第一行代码后立刻卡住的问题“Selenium WebDriver教程”这六个字,我过去三年在团队内部文档、外包需求评审、新人入职培训材料里见过至少278次。但几乎每次打开,都只看到“安装ChromeDriver”“启动…...
)
别再手动敲命令了!用FinalShell一键连接Ubuntu虚拟机(附SSH服务完整配置流程)
FinalShell全自动连接Ubuntu虚拟机的终极指南每次启动Ubuntu虚拟机都要重复输入那十几条命令?还在为SSH连接失败而抓狂?作为一款国产SSH工具,FinalShell的图形化操作和内置文件管理功能确实能极大提升开发效率。但要让整个连接过程真正实现&q…...
原理与边缘计算应用实践)
脉冲神经网络(SNN)原理与边缘计算应用实践
1. 脉冲神经网络技术解析:从生物启发的计算范式到普适计算实践脉冲神经网络(SNN)作为第三代神经网络模型,其设计灵感直接来源于生物神经系统的运作机制。与传统人工神经网络(ANN)相比,SNN最显著…...

量子机器学习模拟器性能优化与门层特性解析
1. 量子机器学习模拟器的性能优化之道量子机器学习(QML)作为量子计算与经典机器学习的交叉领域,其核心挑战在于如何高效模拟量子电路的演化过程。传统量子模拟器如PennyLane的default.qubit采用通用方法处理各类量子门操作,未能充分考虑不同门类型的数学…...

Magic VLSI:开启你的芯片设计之旅,从零到一轻松掌握
Magic VLSI:开启你的芯片设计之旅,从零到一轻松掌握 【免费下载链接】magic Magic VLSI Layout Tool 项目地址: https://gitcode.com/gh_mirrors/magi/magic 你是否曾梦想亲手设计自己的芯片?是否对集成电路设计充满好奇却不知从何入手…...

Unity网络游戏开发避坑指南:手把手教你用C#和MySQL复刻餐厅经营联机对战
Unity网络游戏开发实战:餐厅经营联机对战的技术实现与优化1. 从单机到联机:架构设计的核心转变餐厅经营游戏从单机转向联机对战,首要考虑的是如何重构游戏架构。传统单机游戏的所有逻辑都在本地运行,而联机游戏需要将关键逻辑迁移…...

拆解:我们为宁步建设做南京办公室装修GEO的完整步骤与底层思考
很多南京工装老板现在都有一个共同困惑:网站有、文章发、排名有,就是没有精准咨询。本质原因很简单:传统SEO只“做排名”,而现在的AI搜索GEO是“做答案”。用户现在搜【南京1000平办公室装修】【南京产业园工装公司】,…...