tensorflow.js 如何使用opencv.js通过面部特征点估算脸部姿态并绘制示意图
文章目录
- 前言
- 一、实现步骤
- 1. 获取所需特征点的索引
- 2. 使用opencv.js 计算俯仰角、水平角和翻滚角
- cv.solvePnP介绍
- cv.solvePnP原理
- 运行代码查看效果
- 3.绘制姿态示意直线
- 添加canvas元素
- 计算姿态直线坐标并绘制
- 总结
前言
在计算机视觉领域,估算脸部姿态是一项具有挑战性但又极具应用前景的任务。通过识别脸部特征点,我们可以了解人脸的姿态,包括旋转角度、倾斜程度等信息。本文将介绍如何利用 TensorFlow.js 和 OpenCV.js 结合起来,实现通过面部特征点估算脸部姿态并绘制示意图的功能。
一、实现步骤
本文将基于文章如何使用tensorflow.js实现面部特征点检测中实现的人脸特征点检测继续根据人脸特征点实现人脸姿态的估计和绘制。
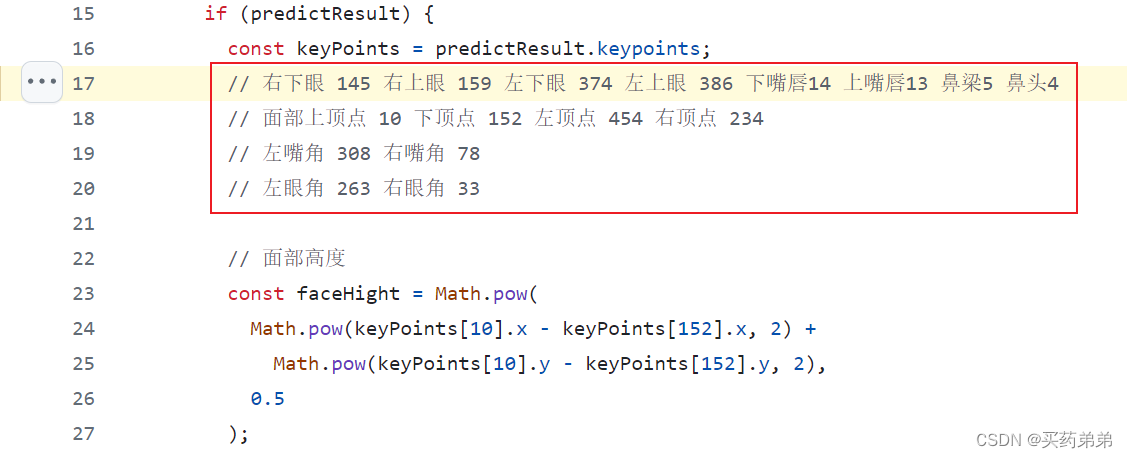
1. 获取所需特征点的索引
我们可以从示例项目看到注释的主要特征点索引如下:
2. 使用opencv.js 计算俯仰角、水平角和翻滚角
我们可以从示例项目看到计算的相关代码如下:
var modelPoints = window.cv.matFromArray(6, 3, window.cv.CV_32F, [0.0,0.0,0.0, // Nose tip0.0,-330.0,-65.0, // Chin-225.0,170.0,-135.0, // Left eye left corner225.0,170.0,-135.0, // Right eye right corne-150.0,-150.0,-125.0, // Left Mouth corner150.0,-150.0,-125.0, // Right mouth corner]);var imagePoints = window.cv.matFromArray(6, 2, window.cv.CV_32F, [keyPoints[4].x,keyPoints[4].y, // Nose tipkeyPoints[152].x,keyPoints[152].y, // ChinkeyPoints[263].x,keyPoints[263].y, // Left eye left cornerkeyPoints[33].x,keyPoints[33].y, // Right eye right cornekeyPoints[308].x,keyPoints[308].y, // Left Mouth cornerkeyPoints[78].x,keyPoints[78].y, // Right mouth corner]);var focal_length = inputResolution.width;var center = [inputResolution.width / 2, inputResolution.height / 2];var cameraMatrix = window.cv.matFromArray(3, 3, window.cv.CV_64F, [focal_length,0,center[0],0,focal_length,center[1],0,0,1,]);// console.log("Camera Matrix", cameraMatrix.data64F);var distCoeffs = window.cv.matFromArray(4,1,window.cv.CV_64F,[0, 0, 0, 0]); // Assuming no lens distortionvar rvec = new window.cv.Mat(3, 1, window.cv.CV_64F);var tvec = new window.cv.Mat(3, 1, window.cv.CV_64F);let ret_val = window.cv.solvePnP(modelPoints,imagePoints,cameraMatrix,distCoeffs,rvec,tvec,false,window.cv.SOLVEPNP_ITERATIVE // flags);// console.log("-------ret_val--------");// console.log(ret_val);// console.log("-------rvecs--------");// console.log("rvecs.data64F", rvec.data64F);// console.log("tvecs.data64F", tvec.data64F);var rtn = getEulerAngle(rvec);var pitch = rtn[0]; // 俯仰角var yaw = rtn[1]; // 水平角var roll = rtn[2]; // 翻滚角// console.log("pitch:", pitch, "yaw:", yaw, "roll:", roll);
cv.solvePnP介绍
在计算机视觉领域,解决摄像头姿态估计(Camera Pose Estimation)问题是一项关键任务。摄像头姿态估计可以用于许多应用,例如增强现实、目标跟踪和三维重建等。OpenCV是一个广泛使用的开源计算机视觉库,其中的cv.solvePnP方法是用于解决摄像头姿态估计问题的重要工具。
cv.solvePnP方法是OpenCV库中的一个函数,用于估计摄像头的姿态。该方法可以通过已知的物体三维坐标和对应的图像中的二维坐标来计算摄像头的姿态。姿态包括摄像头的旋转和平移。
cv.solvePnP原理
cv.solvePnP方法的原理基于解决一种称为PnP问题(Perspective-n-Point Problem)的几何计算。该问题旨在通过已知的三维点和它们在图像中的投影来计算摄像头的姿态。具体来说,该方法利用了摄像头的投影模型和三维-二维点对之间的几何关系。
在解决PnP问题时,cv.solvePnP方法通常使用一种称为迭代最小化重投影误差(Iterative Minimization of Reprojection Error)的技术。该技术通过最小化实际观测到的图像点和由估计的摄像头姿态计算得到的投影点之间的误差来优化姿态估计。
cv.solvePnP方法在许多计算机视觉应用中都有广泛的应用,其中包括但不限于:
增强现实(AR):用于将虚拟对象准确地叠加到实际世界中。
目标跟踪:用于追踪目标物体的位置和姿态。
三维重建:用于从多个视角的图像中重建三维场景。
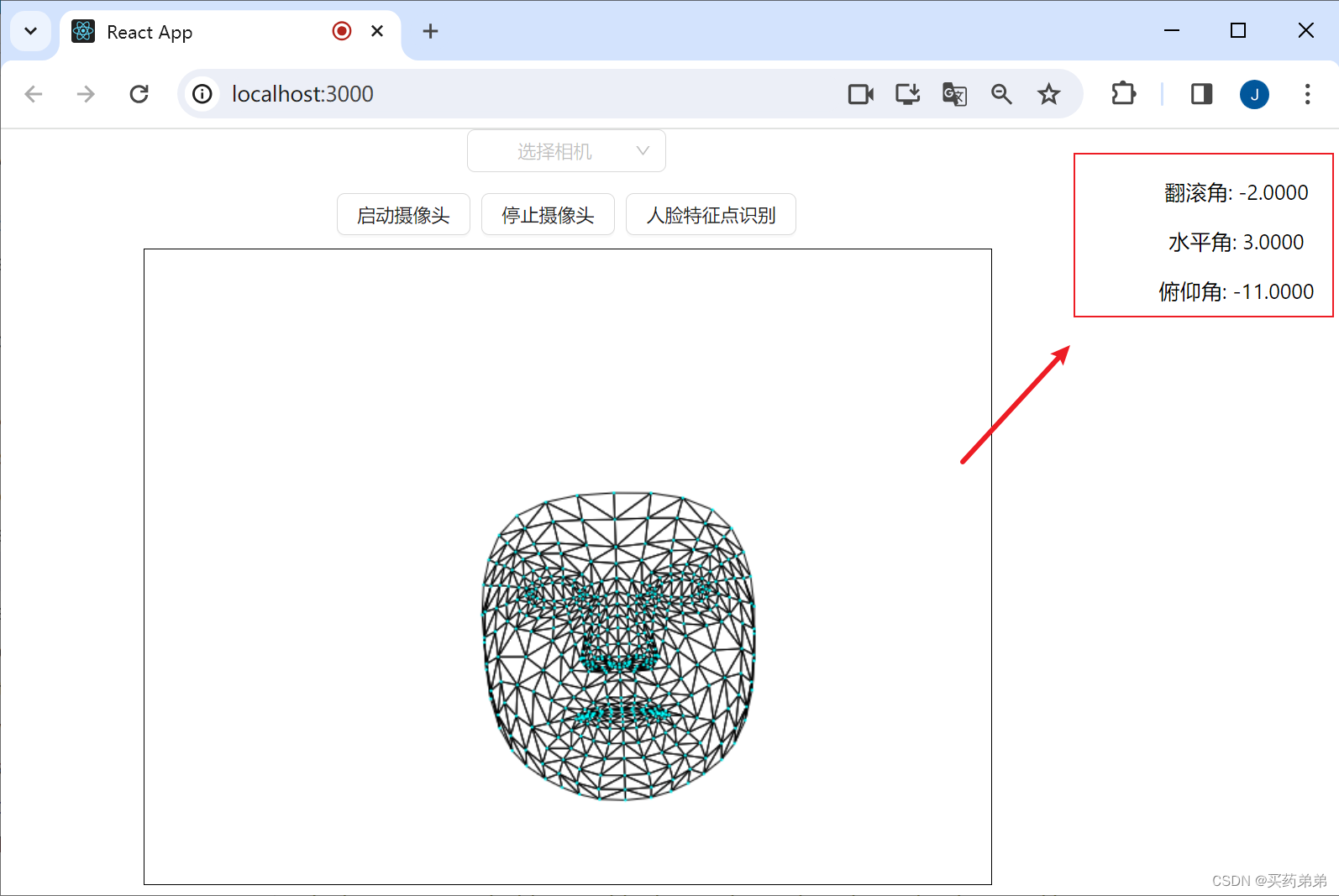
运行代码查看效果
npm i安装依赖
npm start运行代码
3.绘制姿态示意直线
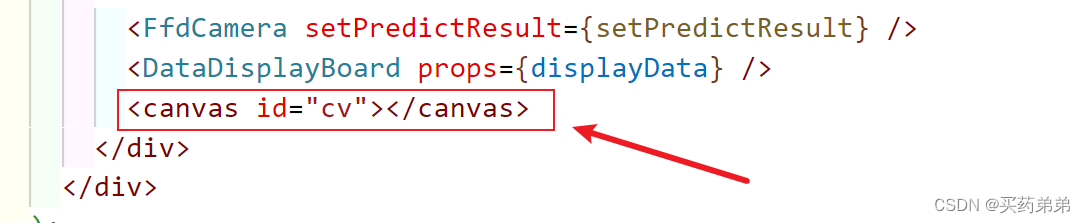
添加canvas元素
计算姿态直线坐标并绘制
相关代码内容如下:
var noseEndPoint2D = new window.cv.Mat(1, 2, window.cv.CV_64F);var jacobian = new window.cv.Mat(imagePoints.rows * 2,13,window.cv.CV_64F);window.cv.projectPoints(window.cv.matFromArray(1, 3, window.cv.CV_64F, [0.0, 0.0, 1000.0]),rvec,tvec,cameraMatrix,distCoeffs,noseEndPoint2D,jacobian);// console.log(noseEndPoint2D);// 绘制线段,连接鼻尖和其它点var p1 = new window.cv.Point(Math.round(imagePoints.data32F[0]),Math.round(imagePoints.data32F[1]));var p2 = new window.cv.Point(Math.round(noseEndPoint2D.data64F[0]),Math.round(noseEndPoint2D.data64F[1]));var zeroMat = window.cv.Mat.zeros(inputResolution.height,inputResolution.width,window.cv.CV_8U);// console.log("p1", p1.x, p1.y);// console.log("p2", p2.x, p2.y);window.cv.line(zeroMat, p1, p2, new window.cv.Scalar(255, 0, 0), 2);window.cv.imshow("cv", zeroMat);
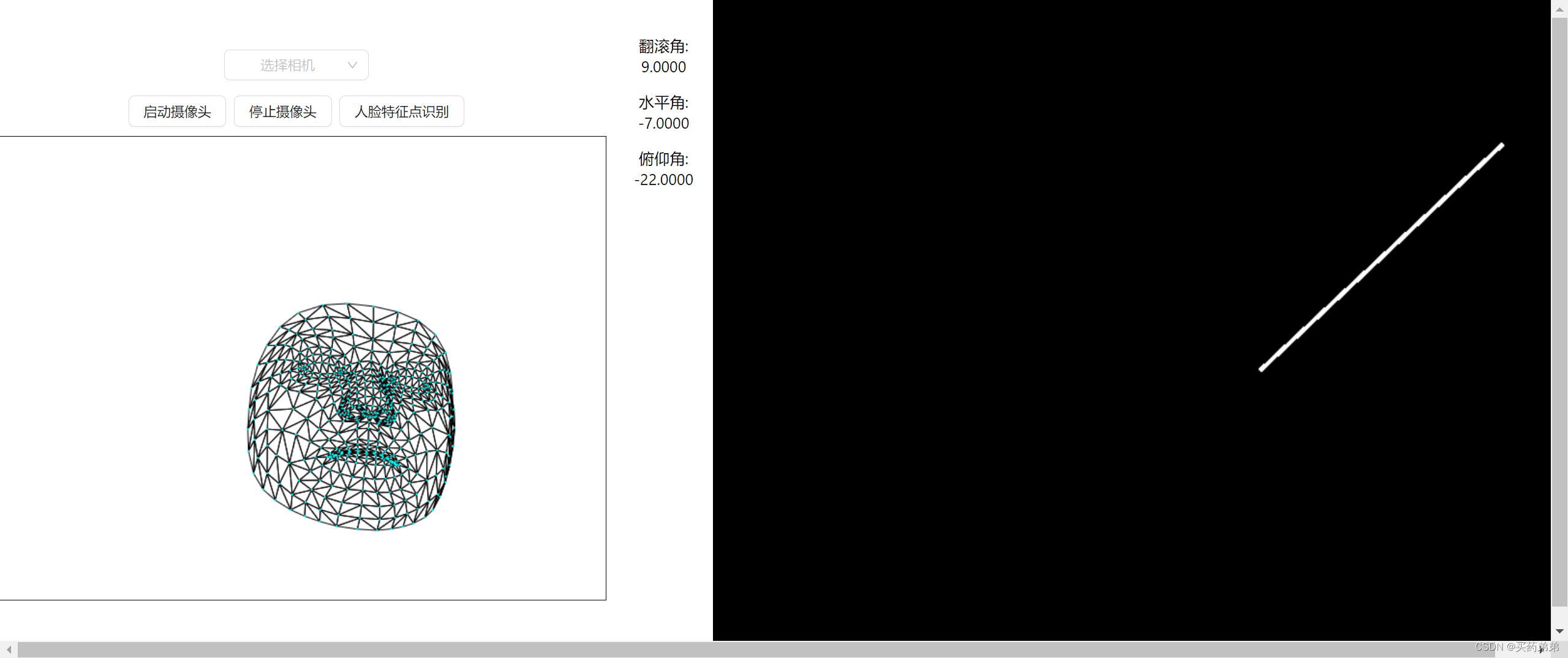
最终的效果如下
总结
感谢您看到这里,本文介绍了如何结合tensorflow.js 和 opencv.js通过面部特征点估算脸部姿态并绘制示意图,希望对您有所帮助,如果文章中存在任何问题、疏漏,或者您对文章有任何建议,请在评论区提出。
相关文章:
tensorflow.js 如何使用opencv.js通过面部特征点估算脸部姿态并绘制示意图
文章目录 前言一、实现步骤1. 获取所需特征点的索引2. 使用opencv.js 计算俯仰角、水平角和翻滚角cv.solvePnP介绍cv.solvePnP原理运行代码查看效果 3.绘制姿态示意直线添加canvas元素计算姿态直线坐标并绘制 总结 前言 在计算机视觉领域,估算脸部姿态是一项具有挑…...
)
Linux命令-dpkg-divert命令(Debian Linux中创建并管理一个转向列表)
说明 dpkg-divert命令 是Debian Linux中创建并管理一个转向(diversion)列表,其使得安装文件的默认位置失效的工具。 语法 dpkg-divert(选项)(参数)选项 --add:添加一个转移文件; --remove:删除一个转移…...

flex: 1 是哪些属性的缩写?
flex:1是哪些属性的缩写? flex:1 是 flex-grow: 1, flex-shrink: 1,flex-basis: 0% 的缩写; 解释下flex-grow flex-grow是将剩余的空间,根据flex-grow的值平分,然后加到flex-basis上 <!doctype html> <htm…...
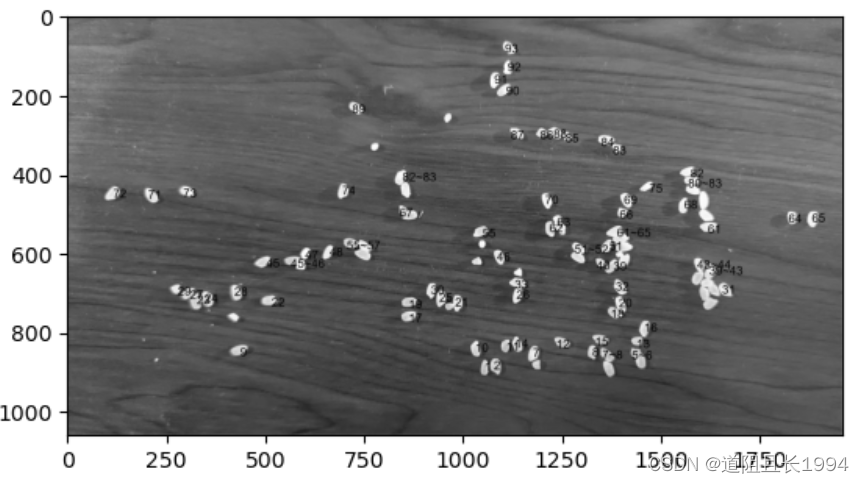
python基于opencv实现数籽粒
千粒重是一个重要的农艺性状,通过对其的测量和研究,我们可以更好地理解作物的生长状况,优化农业生产,提高作物产量和品质。但数籽粒数目是一个很繁琐和痛苦的过程,我们现在用一个简单的python程序来数水稻籽粒。代码的…...

OpenCV图像处理——基于OpenCV的ORB算法实现目标追踪
概述 ORB(Oriented FAST and Rotated BRIEF)算法是高效的关键点检测和描述方法。它结合了FAST(Features from Accelerated Segment Test)算法的快速关键点检测能力和BRIEF(Binary Robust Independent Elementary Feat…...

13.JavaWeb XML:构建结构化数据的重要工具
目录 导语: 一、XML概念 (1)可拓展 (2)功能-存储数据 (3)xml与html的区别 二、XML内容 三、XML用途 四、案例:使用XML构建在线书店的书籍数据库 结语: 导语&…...
鸿蒙OS实战开发:【多设备自适应服务卡片】
介绍 服务卡片的布局和使用,其中卡片内容显示使用了一次开发,多端部署的能力实现多设备自适应。 用到了卡片扩展模块接口,[ohos.app.form.FormExtensionAbility] 。 卡片信息和状态等相关类型和枚举接口,[ohos.app.form.formInf…...
深度学习基础之一:机器学习
文章目录 深度学习基本概念(Basic concepts of deep learning)机器学习典型任务机器学习分类 模型训练的基本概念基本名词机器学习任务流程模型训练详细流程正、反向传播学习率Batch size激活函数激活函数 sigmoid 损失函数MSE & M交叉熵损失 优化器优化器 — 梯度下降优化…...

Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之五 简单指定视频某片段重复播放效果
Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之五 简单指定视频某片段重复播放效果 目录 Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之五 简单指定视频某片段重复播放效果 一、简单介绍 二、简单指定视频某片段重复播放…...
)
ARXML处理 - C#的解析代码(二)
参数类 参数容器(ECUCPARAMCONFCONTAINERDEF)的PARAMETERS集合类由以下参数类实例构成。 枚举参数(ECUCENUMERATIONPARAMDEF ) 配置一个下拉选项,如PORT中一个pin可以配置SPI, CAN, PWM /// <remarks/>[Syste…...

关于华为即将举行的鸿蒙春季沟通会的新闻报道
华为计划在4月11日举办此次活动,届时将推出与车和PC类相关的新产品。尽管备受期待的华为P70系列设备的发布尚未得到官方确认,但已有多家媒体对此进行了报道。 文章中还提到了智界S7的新款可能在4月11日上市,并进行多项新功能升级。智界S7是去…...

MySQL视图及如何导入导出
1.视图 MySQL 视图(View)是一种虚拟存在的表,同真实表一样,视图也由列和行构成,但视图并不实际存在于数据库中。行和列的数据来自于定义视图的查询中所使用的表,并且还是在使用视图时动态生成的࿰…...
文心一言上线声音定制功能;通义千问开源模型;openAI又侵权?
文心一言上线定制专属声音功能 百度旗下 AI 聊天机器人文心一言上线新功能,用户录音一句话,即可定制声音。 使用这项功能需要使用文心一言 App。在创建智能体中,点击创建自己的声音,朗读系统提示的一句话,等候几秒钟时…...

课时89:流程控制_函数进阶_函数变量
2.1.4 综合案例 这一节,我们从 信息采集、环境部署、小结 三个方面来学习。 信息采集 脚本实践-采集系统负载信息 查看脚本内容 [rootlocalhost ~]# cat function_systemctl_load.sh #!/bin/bash # 功能:采集系统负载信息 # 版本:v0.3 # …...
)
Linux命令-dpkg-preconfigure命令(Debian Linux中软件包安装之前询问问题)
说明 dpkg-preconfigure命令 用于在Debian Linux中软件包安装之前询问问题。 语法 dpkg-preconfigure(选项)(参数)选项 -f:选择使用的前端; -p:感兴趣的最低的优先级问题; --apt:在apt模式下运行。参数 软件包&am…...

SEO优化艺术:精细化技巧揭示与搜索引擎推广全面战略解读
SEO(搜索引擎优化,Search Engine Optimization)是一种网络营销策略,旨在通过改进网站内外的各项元素,提升网站在搜索引擎自然搜索结果中的排名,从而吸引更多目标用户访问网站,增加流量ÿ…...
《springcloud alibaba》 四 seata安装以及使用
目录 准备调整db配置准备创建数据库 seata配置nacos配置confi.txt下载向nacos推送配置的脚本 启动seata新建项目order-seata项目 订单项目数据库脚本pom.xmlapplication.yml启动类实体类dao类service类controller类feign类mapper类 stock-seata 库存项目数据库脚本pom.xmlappli…...

-bash: cd: /etc/hadoop: 没有那个文件或目录
解决办法:source /etc/profile 运行 source /etc/profile 命令会重新加载 /etc/profile 文件中的配置,这样做的目的是使任何更改立即生效,而不需要注销并重新登录用户。通常,/etc/profile 文件包含系统范围的全局 Shell 配置&…...
JVM字节码与类加载——字节码指令集与解析
文章目录 1、概述1.1、字节码与数据类型1.2、指令分类 2、加载与存储指令2.1、局部变量入栈指令2.2、常量入栈指令2.3、出栈装入局部变量表指令 3、算术指令3.1、彻底理解i与i3.2、比较指令 4、类型转换指令4.1、宽化类型转换4.2、窄化类型转换 5、对象、数组的创建与访问指令5…...
景芯2.5GHz A72训练营dummy添加(一)
景芯A72做完布局布线之后导出GDS,然后进行GDS merge,然后用Calibre对Layout添加Dummy。在28nm以及之前的工艺中,Dummy metal对Timing的影响不是很大,当然Star RC也提供了相应的解决方案,可以考虑Dummy metal来抽取RC。…...

一款强大的PHP视频播放器:轻松嵌入,高效播放
一款强大的PHP视频播放器:轻松嵌入,高效播放 【下载地址】PHP视频播放器源码 本仓库提供了一个PHP视频播放器的源码,支持播放m3u8和mp4格式的资源。该播放器可以直接嵌入到网站中,方便用户在线观看视频内容 项目地址: https://g…...

Real World Rails实战:10个高效学习Rails开发的最佳实践
Real World Rails实战:10个高效学习Rails开发的最佳实践 【免费下载链接】real-world-rails Real World Rails applications and their open source codebases for developers to learn from 项目地址: https://gitcode.com/gh_mirrors/re/real-world-rails …...

对比自行维护多个 API 密钥,使用 Taotoken 在管理上轻松许多
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比自行维护多个 API 密钥,使用 Taotoken 在管理上轻松许多 作为一名个人开发者,我曾长期在多个大模型服务…...

宽带卫星通信系统同步与大规模阵列波束成形技术【附程序】
✨ 长期致力于符号定时恢复、频率估计、可变分数延迟滤波器、时延估计、真时延阵列研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于迭代短卷积的多…...

利用Taotoken的Token Plan套餐为团队项目节省大模型调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken的Token Plan套餐为团队项目节省大模型调用成本 对于中小型技术团队而言,在项目开发中引入大模型能力已成…...

2025届毕业生推荐的AI辅助论文网站解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 当下,学术研究越发受到人们的重视,在此种背景状况之下,论…...

OxyGent入门指南:10分钟快速搭建你的第一个多智能体系统
OxyGent入门指南:10分钟快速搭建你的第一个多智能体系统 【免费下载链接】OxyGent [ACL 2026] OxyGent: Making Multi-Agent Systems Modular, Observable, and Evolvable via Oxy Abstraction 项目地址: https://gitcode.com/gh_mirrors/ox/OxyGent OxyGent…...

如何用Project Graph快速构建思维导图?终极跨平台节点图绘制指南
如何用Project Graph快速构建思维导图?终极跨平台节点图绘制指南 【免费下载链接】project-graph A node-based visual tool for organizing thoughts and notes in a non-linear way. 项目地址: https://gitcode.com/gh_mirrors/pr/project-graph 还在为项目…...

高校图书馆未公开的Perplexity学术协议:解锁DOI深度解析、跨库引文追踪与灰色文献捕获权限
更多请点击: https://codechina.net 第一章:高校图书馆未公开的Perplexity学术协议全景解析 Perplexity学术协议并非官方发布的标准规范,而是国内部分高校图书馆在采购或对接Perplexity Pro教育版API服务时,经谈判形成的定制化协…...

靠谱的openai claudecode AI中转站
各位大神开发都用那些模型?最近用Trae的模型一下就降智,切换到apikeyfun.com 用了ops4.7和gpt5.5简直是降维打击,速度快,还不错!...