计算机视觉 | 基于 ORB 特征检测器和描述符的全景图像拼接算法
Hi,大家好,我是半亩花海。本项目实现了基于 ORB 特征检测器和描述符的全景图像拼接算法,能够将两张部分重叠的图像拼接成一张无缝连接的全景图像。
文章目录
- 一、随机抽样一致算法
- 二、功能实现
- 三、代码解析
- 四、效果展示
- 五、完整代码
一、随机抽样一致算法
我们可以通过求取上一张中的特征点匹配的方法,将多个图片拼接在一起。简单来说就是将这张图片做一个变换到另外一个图片上面去,中间就是一个变换矩阵。
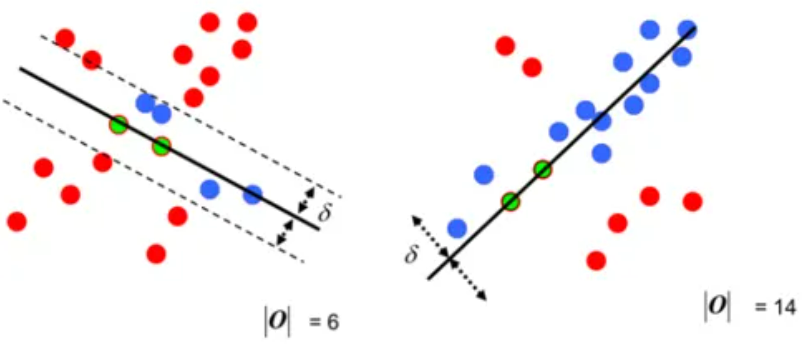
随机抽样一致算法(Random sample consensus,RANSAC):

由于局外点、异常点的干扰,最小二乘拟合的效果容易走偏,而随机抽样一致算法中的数据点更不容易走偏,拟合的效果更好。
选择初始样本点进行拟合,给定一个容忍范围,不断进行迭代。

随机算两个点,看落在区间内的点有多少个,越多越好。
每一次拟合后,容差范围内都有对应的数据点数,找出数据点个数最多的情况,就是最终的拟合结果:
单应性矩阵:

二、功能实现
全景图像拼接流程:
- 提取图像特征
- 对两张图片提取的特征点求变换矩阵
- 变换
-
图像拼接功能
- 支持将两张部分重叠的图像拼接成一张全景图像。
-
特征检测与匹配
- 使用 ORB 特征检测器和描述符进行关键点检测和特征提取。
- 使用 BFMatcher 进行关键点匹配。
-
参数调整
- 可调整拼接参数,如匹配比例和重投影误差阈值。
-
可视化
- 可选择是否显示关键点匹配可视化结果。
三、代码解析
-
Stitcher类
- stitch方法: 用于执行图像拼接。
- detectAndDescribe方法: 用于特征检测和描述。
- matchKeypoints方法: 用于关键点匹配和透视变换计算。
- drawMatches方法: 用于绘制关键点匹配可视化结果。
-
使用方法
- 准备两张待拼接的部分重叠图像。
- 调用 Stitcher 类的 stitch 方法,传入待拼接图像。
- 根据需要选择是否显示关键点匹配可视化结果。
- 获取拼接后的全景图像。
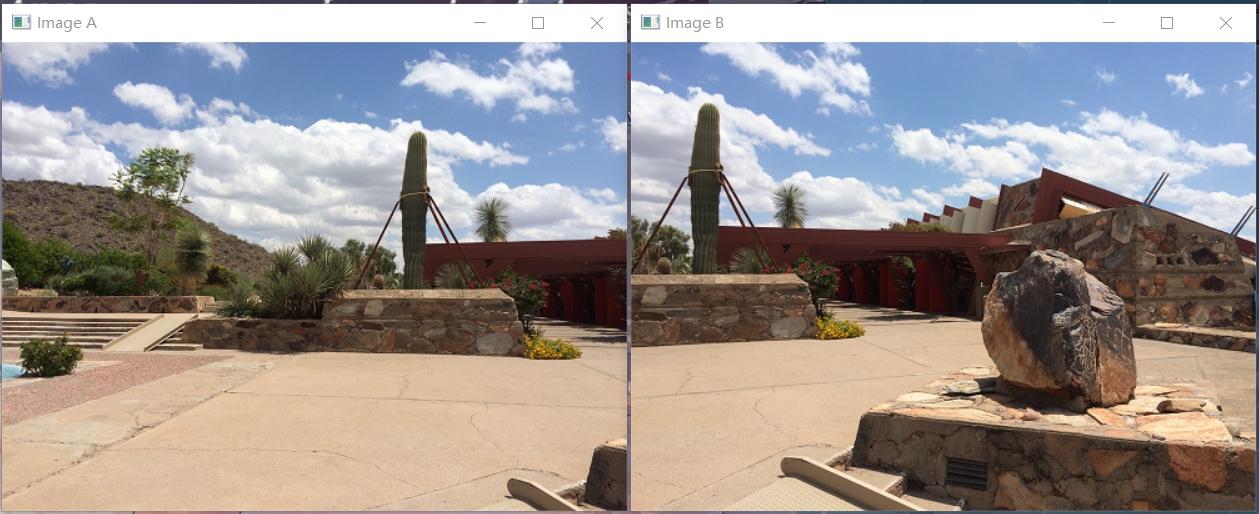
四、效果展示
两张原图:
关键点匹配:

拼接结果:

五、完整代码
#!/usr/bin/env python
# -*- coding:utf-8 -*-
"""
@Project : Stitcher-全景图像拼接-ORB特征检测器和描述符
@File : Stitcher.py
@IDE : PyCharm
@Author : 半亩花海
@Date : 2024/04/10 11:29
"""
import numpy as np
import cv2class Stitcher:def stitch(self, images, ratio=0.75, reprojThresh=4.0, showMatches=False): # 拼接函数# 解包输入图片(imageB, imageA) = images# 将图片转换为灰度图grayA = cv2.cvtColor(imageA, cv2.COLOR_BGR2GRAY)grayB = cv2.cvtColor(imageB, cv2.COLOR_BGR2GRAY)# 使用ORB特征检测器和描述符(kpsA, featuresA) = self.detectAndDescribe(grayA)(kpsB, featuresB) = self.detectAndDescribe(grayB)# 匹配特征点M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)# 如果匹配结果为空,则返回Noneif M is None:print("Failed to stitch images. Not enough matches.")return None# 解包匹配结果(matches, H, status) = M# 进行透视变换,拼接图像result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB# 如果需要显示匹配结果,则返回拼接图和匹配可视化图if showMatches:vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)return (result, vis)# 否则,只返回拼接图return result@staticmethoddef cv_show(name, img):# 显示图像cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()@staticmethoddef detectAndDescribe(image):# 创建ORB特征检测器orb = cv2.ORB_create()# 检测特征点并计算描述符(kps, features) = orb.detectAndCompute(image, None)kps = np.float32([kp.pt for kp in kps])return (kps, features)@staticmethoddef matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):# 创建BFMatcher对象matcher = cv2.BFMatcher()# 使用KNN匹配rawMatches = matcher.knnMatch(featuresA, featuresB, 2)# 进行筛选,获取匹配点对matches = []for m in rawMatches:if len(m) == 2 and m[0].distance < m[1].distance * ratio:matches.append((m[0].trainIdx, m[0].queryIdx))# 如果匹配点对数量大于4,则计算透视变换矩阵if len(matches) > 4:ptsA = np.float32([kpsA[i] for (_, i) in matches])ptsB = np.float32([kpsB[i] for (i, _) in matches])(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)return (matches, H, status)# 否则,返回Nonereturn None@staticmethoddef drawMatches(imageA, imageB, kpsA, kpsB, matches, status):(hA, wA) = imageA.shape[:2](hB, wB) = imageB.shape[:2]vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")vis[0:hA, 0:wA] = imageAvis[0:hB, wA:] = imageBfor ((trainIdx, queryIdx), s) in zip(matches, status):if s == 1:ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))cv2.line(vis, ptA, ptB, (0, 255, 0), 1)return visif __name__ == "__main__":# 读取拼接图片imageA = cv2.imread("left_01.png")imageB = cv2.imread("right_01.png")# 把图片拼接成全景图stitcher = Stitcher()result = stitcher.stitch([imageA, imageB], showMatches=True)if result is not None:# 解包拼接结果(panorama, matchesVis) = result# 显示拼接前的两幅图像,匹配的关键点和拼接后的图像cv2.imshow("Image A", imageA)cv2.imshow("Image B", imageB)cv2.imshow("Keypoint Matches", matchesVis)cv2.imshow("Result", panorama)cv2.waitKey(0)cv2.destroyAllWindows()
相关文章:
计算机视觉 | 基于 ORB 特征检测器和描述符的全景图像拼接算法
Hi,大家好,我是半亩花海。本项目实现了基于 ORB 特征检测器和描述符的全景图像拼接算法,能够将两张部分重叠的图像拼接成一张无缝连接的全景图像。 文章目录 一、随机抽样一致算法二、功能实现三、代码解析四、效果展示五、完整代码 一、随机…...
)
Scala - 函数柯里化(Currying)
柯里化(Currying)指的是将原来接受两个参数的函数变成新的接受一个参数的函数的过程。新的函数返回一个以原有第二个参数为参数的函数。 实例 首先我们定义一个函数: def add(x:Int,y:Int)xy 那么我们应用的时候,应该是这样用:add(1,2) 现在我们把这…...

Switch-case
Java switch case 语句 switch case 语句判断一个变量与一系列值中某个值是否相等,每个值称为一个分支。 语法 switch case 语句语法格式如下: switch(expression){case value ://语句break; //可选case value ://语句break; //可选//你可以有任意数量…...
蓝桥杯-单片机基础16——利用定时计数中断进行动态数码管的多窗口显示
综合查阅了网络上目前能找到的所有关于此技能的代码,最终找到了下述方式比较可靠,且可以自定义任意显示的数值。 传统采用延时函数的方式实现动态数码管扫描,在题目变复杂时效果总是会不佳,因此在省赛中有必要尝试采用定时计数器中…...
2024/4/5—力扣—下一个排列
代码实现: 思路:两遍扫描 void swap(int *a, int *b) {int t *a;*a *b;*b t; }void reverse(int *nums, int l, int r) {while (l < r) {swap(nums l, nums r);l;r--;} }void nextPermutation(int *nums, int numsSize) {int i numsSize - 2;wh…...
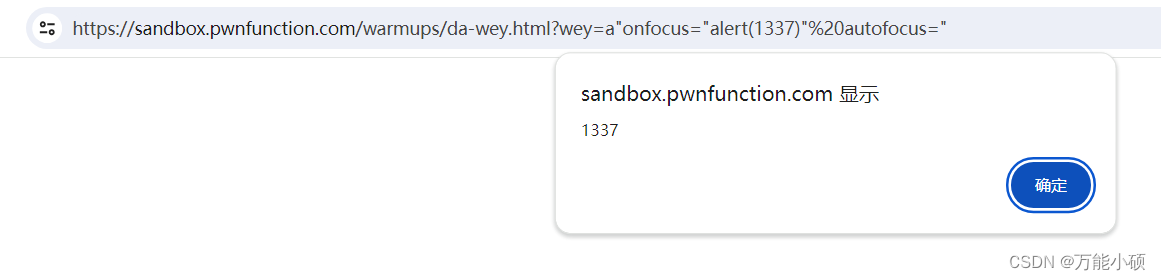
xss.pwnfunction-Ugandan Knuckles
这个是把<>过滤掉了所以只能用js的事件 ?weya"onfocus"alert(1337)" autofocus"...

LabVIEW和2D激光扫描的受电弓滑板磨耗精确测量
LabVIEW和2D激光扫描的受电弓滑板磨耗精确测量 在电气化铁路运输中,受电弓滑板的健康状况对于保障列车安全行驶至关重要。受电弓滑板作为连接电网与列车的直接介质,其磨损情况直接影响到电能的有效传输及列车的稳定运行。精确、快速测量受电弓滑板磨损情…...
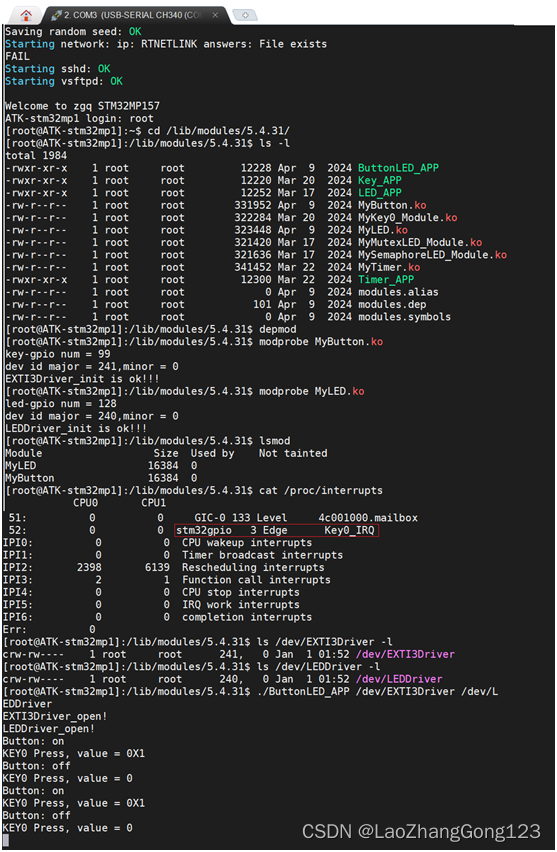
Linux第87步_阻塞IO实验
阻塞IO是“应用程序”对“驱动设备”进行操作,若不能获取到设备资源,则阻塞IO应用程序的线程会被“挂起”,直到获取到设备资源为止。 “挂起”就是让线程进入休眠,将CPU的资源让出来。线程进入休眠后,当设备文件可以操…...
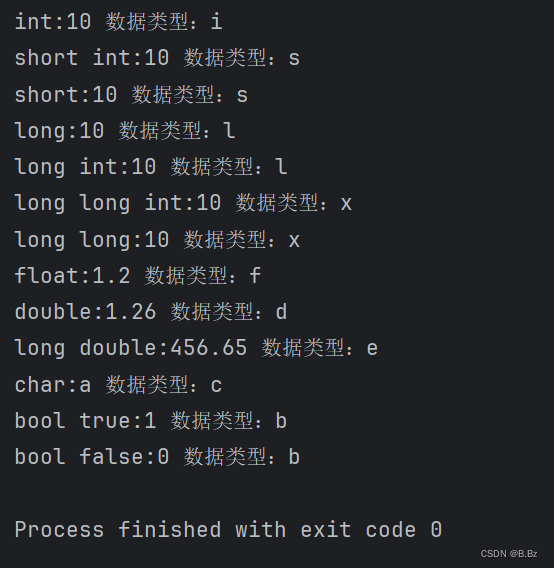
C/C++基础----常量和基本数据类型
HelloWorld #include <iostream>using namespace std;int main() {// 打印cout << "Hello,World!" << endl;return 0; }c/c文件和关系 c和c是包含关系,c相当于是c的plus版本c的编译器也可以编译c语言c文件.cpp结尾.h为头文件.c为c语言…...

什么是生成式AI?有哪些特征类型
生成式AI是人类一种人工智能技术,可以生成各种类型的内容,包括文本、图像、音频和合成数据。那么什么是人工智能?人工智能和机器学习之间的区别是什么?有哪些技术特征? 人工智能是一门学科,是计算机科学的一…...

《Linux C/C++服务器开发实践》之第7章 服务器模型设计
《Linux C/C服务器开发实践》之第7章 服务器模型设计 7.1 I/O模型7.1.1 基本概念7.1.2 同步和异步7.1.3 阻塞和非阻塞7.1.4 同步与异步和阻塞与非阻塞的关系7.1.5 采用socket I/O模型的原因7.1.6(同步)阻塞I/O模型7.1.7(同步)非阻…...
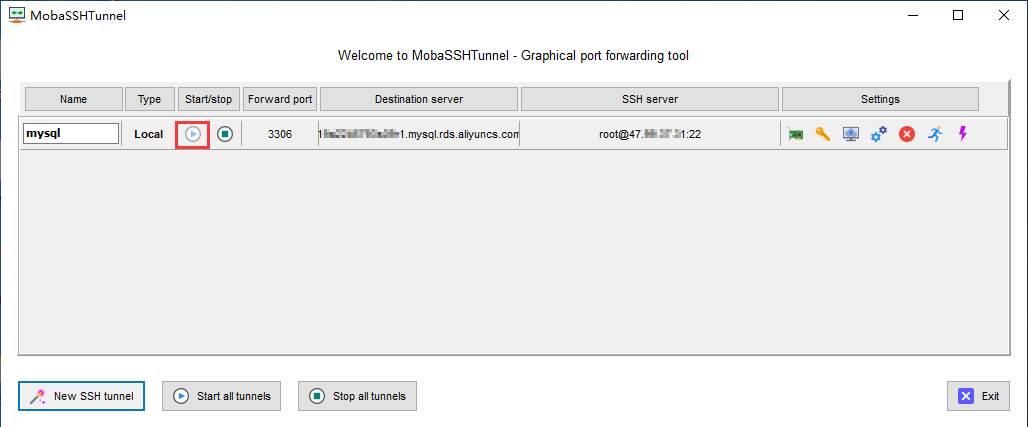
SSH穿透ECS访问内网RDS数据库
处于安全考虑,RDS一般只会允许指定的IP进行访问,而我们开发环境的IP往往是动态的,每次IP变动都需要去修改RDS的白名单,为我们的工作带来很大的不便。 那么如何去解决这个问题? 假如我们有一台ESC服务器,E…...
python 有哪些函数
Python内置的函数及其用法。为了方便记忆,已经有很多开发者将这些内置函数进行了如下分类: 数学运算(7个) 类型转换(24个) 序列操作(8个) 对象操作(7个) 反射操作(8个) 变量操作(2个) 交互操作(2个) 文件操作(1个) 编译执行(4个) 装饰器(3个) …...

ubuntu web端远程桌面控制
本方案采用x11vncnovnc来实现x11vnc的安装和配置可以参考UOS搭建VNC及连接教程_uos安装vnc-CSDN博客;并把/lib/systemd/system/x11vnc.service内容修改为如下: [Unit]DescriptionStart x11vnc at startup.Aftermulti-user.target[Service]TypesimpleExecStart/usr/bin/x11vnc …...
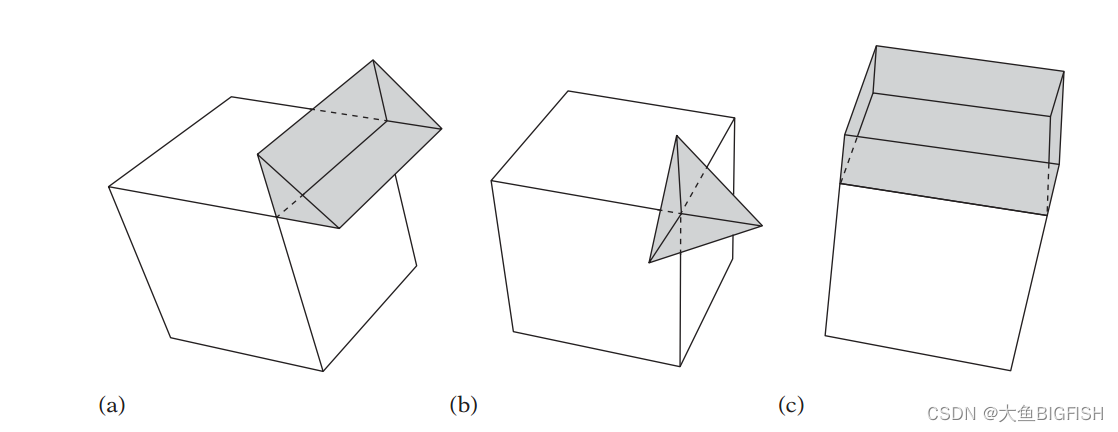
PCL 点到三角形的距离(3D)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 给定三角形ABC和点P,设Q为描述ABC上离P最近的点。求Q的一个方法:如果P在ABC内,那么P的正交投影点就是离P最近的点Q。如果P投影在ABC之外,最近的点则必须位于它的一条边上。在这种情况下,Q可以通过计算线段AB、…...
C# wpf 嵌入外部程序
WPF Hwnd窗口互操作系列 第一章 嵌入Hwnd窗口 第二章 嵌入WinForm控件 第三章 嵌入WPF控件 第四章 嵌入外部程序(本章) 第五章 底部嵌入HwndHost 文章目录 WPF Hwnd窗口互操作系列前言一、如何实现?1、定义属性2、进程嵌入(1&…...
【ELK】ELK企业级日志分析系统
搜集日志;日志处理器;索引平台;提供视图化界面;客户端登录 日志收集者:负责监控微服务的日志,并记录 日志存储者:接收日志,写入 日志harbor:负责去连接多个日志收集者&am…...

详细的讲一下java的接口回调
Java的接口回调是一种允许程序在特定事件发生时通知其他对象的机制。这是观察者设计模式的一种实现方式,常用于实现事件监听和异步处理。接口回调允许对象之间进行松耦合的交互:一个对象只知道它可以调用另一个对象的方法,但它不需要知道这个…...

如何将powerpoint(PPT)幻灯片嵌入网页中在线预览、编辑并保存到服务器?
猿大师办公助手不仅可以把微软Office、金山WPS和永中Office的Word文档、Excel表格内嵌到浏览器网页中实现在线预览、编辑保存等操作,还可以把微软Office、金山WPS和永中Office的PPT幻灯片实现网页中在线预览、编辑并保存到服务器。 猿大师办公助手把本机原生Office…...

[Java基础揉碎]日期类
目录 日期类 第一代日期类 第二代日期类 第三代日期类 >前面两代日期类的不足分析 针对以上问题Java在jdk8加入了以下方法 jdk8的时间格式化 时间戳 第三代日期类更多方法 日期类 [知道怎么查,怎么用即可,不用每个方法都背] 第一代日期类 1) Date: …...

AI运维管理与安全防护设备功率MOSFET选型方案——高效、可靠与智能驱动系统设计指南
随着智能化运维与主动安全防护需求的爆发式增长,AI边缘计算节点、智能传感器与安全执行单元已成为现代基础设施管理的核心。其电源管理与信号驱动系统作为设备可靠运行与实时响应的基石,直接决定了系统的能效、稳定性及防护等级。功率MOSFET作为该系统中…...

电赛E题三子棋:我是如何用Open MV色块识别替代矩形识别,搞定棋盘定位的?
电赛E题三子棋:OpenMV色块识别技术实战解析 从矩形识别到色块识别的技术转型 在电子设计竞赛的视觉识别任务中,棋盘定位一直是个经典难题。最初我们团队采用了官方推荐的矩形识别方案,但实际调试中遇到了诸多挑战: 识别率不稳定&a…...

mxbai-embed-large-v1效果展示:超越OpenAI的文本嵌入模型实测
mxbai-embed-large-v1效果展示:超越OpenAI的文本嵌入模型实测 1. 引言:文本嵌入技术的新标杆 在自然语言处理领域,文本嵌入模型正成为各类智能应用的基础设施。mxbai-embed-large-v1作为最新开源的文本嵌入模型,在MTEB基准测试中…...

从分类影像到Fragstats输入:搞定景观格局分析前处理的完整避坑指南
景观格局分析前处理全流程:从分类影像到Fragstats输入的实战避坑指南 当你完成遥感影像分类,准备计算景观指数时,是否遇到过Fragstats报错"Invalid input format"?或是发现计算结果与预期不符却找不到原因?本…...

瑞芯微RK3399固件急救指南:用upgrade_tool搞定系统崩溃后的快速还原
RK3399固件灾难恢复实战:从分区表重建到全系统还原 当一块搭载RK3399的开发板因固件损坏而变砖时,那种面对黑屏的无力感,相信每个嵌入式开发者都深有体会。去年我们产线就遭遇过因批量升级失败导致30台设备集体罢工的紧急状况,正…...

避开这3个坑,你的软考数据库设计题至少多拿10分:从E-R图合并冲突到SQL约束实战
软考数据库设计题避坑指南:从E-R图到SQL约束的实战技巧 每次软考结束,总有一批考生捶胸顿足——"那道数据库设计题明明会做,怎么又丢分了?"作为参加过三次软考阅卷的数据库讲师,我发现90%的失分都集中在几个…...

iptables实战指南:从链表关系到规则配置的完整解析
1. iptables基础概念与核心组件 第一次接触iptables时,我盯着那些复杂的规则配置看了整整一个下午。后来才发现,理解iptables的关键在于掌握它的"四表五链"架构。简单来说,iptables就像是一个多层安检系统,数据包要经过…...

CLAP音频分类环境部署:Python3.8+PyTorch+Gradio一键配置指南
CLAP音频分类环境部署:Python3.8PyTorchGradio一键配置指南 想不想让电脑“听懂”声音?比如,上传一段音频,它就能告诉你这是狗叫、猫叫还是汽车鸣笛。这听起来像是科幻电影里的场景,但现在,借助一个叫CLAP…...

【ZGC性能调优终极指南】:20年JVM专家亲授5大实战瓶颈突破法
第一章:ZGC核心机制与性能边界全景透视ZGC(Z Garbage Collector)是JDK 11引入的低延迟垃圾收集器,专为处理TB级堆内存与毫秒级停顿目标而设计。其核心突破在于并发标记、并发重定位与着色指针(Colored Pointers&#x…...

春招已经过半,这一波再不动手,基本就没位置了
关注 霍格沃兹测试学院公众号,回复「资料」,领取人工智能测试开发技术合集导读3月底这个时间点,如果你还在纠结“要不要投”,那基本已经慢半拍了。现在的真实情况是:大厂已经进入筛选面试并行阶段一部分公司已经开始发…...