利用lidar_align来进行lidar和imu标定
文章目录
- 下载并安装lidar_align
- 安装nlopt
- 迁移NLOPTConfig.cmake
- 修改loader.cpp文件
- 编译并运行
下载并安装lidar_align
mkdir -p lidar_align/src
cd lidar_align/src
git clone https://github.com/ethz-asl/lidar_align.git
安装nlopt
git clone http://github.com/stevengj/nlopt
cd nlopt/
mkdir build
cd build
cmake ..
make
sudo make install
迁移NLOPTConfig.cmake
将 lidar_align/src/lidar_align/NLOPTConfig.cmake 文件移动到 lidar_align/src/ 下(与lidar_align同级)
修改loader.cpp文件
首先在该文件顶部添加 #include <sensor_msgs/Imu.h>,然后这个工具包原先是用来标定lidar和odom(里程计),所以需要将里程计接口替换为imu接口:
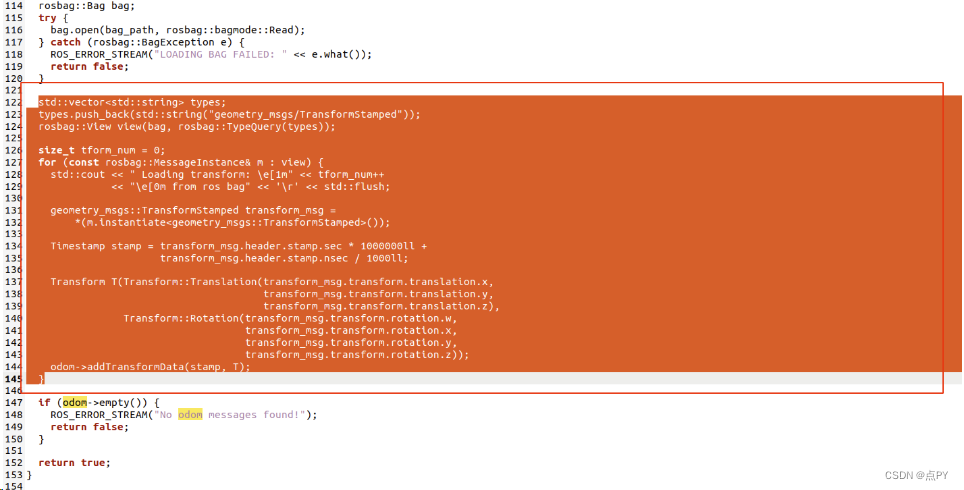
将上图中标记部分的代码注释掉,在注释之后位置添加:
types.push_back(std::string("sensor_msgs/Imu"));rosbag::View view(bag, rosbag::TypeQuery(types));size_t imu_num = 0;double shiftX=0,shiftY=0,shiftZ=0,velX=0,velY=0,velZ=0;ros::Time time;double timeDiff,lastShiftX,lastShiftY,lastShiftZ;for (const rosbag::MessageInstance& m : view){std::cout <<"Loading imu: \e[1m"<< imu_num++<<"\e[0m from ros bag"<<'\r'<< std::flush;sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;if(imu_num==1){time=imu.header.stamp;Transform T(Transform::Translation(0,0,0),Transform::Rotation(1,0,0,0));odom->addTransformData(stamp, T);}else{timeDiff=(imu.header.stamp-time).toSec();time=imu.header.stamp;velX=velX+imu.linear_acceleration.x*timeDiff;velY=velX+imu.linear_acceleration.y*timeDiff;velZ=velZ+(imu.linear_acceleration.z-9.801)*timeDiff;lastShiftX=shiftX;lastShiftY=shiftY;lastShiftZ=shiftZ;shiftX=lastShiftX+velX*timeDiff+imu.linear_acceleration.x*timeDiff*timeDiff/2;shiftY=lastShiftY+velY*timeDiff+imu.linear_acceleration.y*timeDiff*timeDiff/2;shiftZ=lastShiftZ+velZ*timeDiff+(imu.linear_acceleration.z-9.801)*timeDiff*timeDiff/2;Transform T(Transform::Translation(shiftX,shiftY,shiftZ),Transform::Rotation(imu.orientation.w,imu.orientation.x,imu.orientation.y,imu.orientation.z));odom->addTransformData(stamp, T);}}
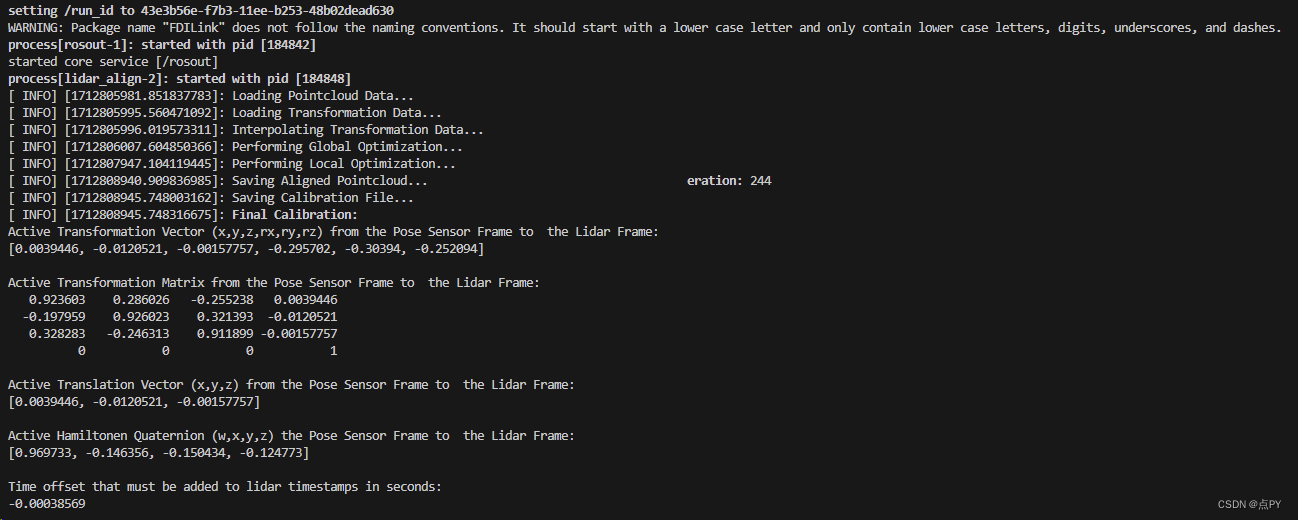
编译并运行
cd lidar_align
catkin_make
source ./devel/setup.bash
roslaunch lidar_align lidar_align.launch
相关文章:
利用lidar_align来进行lidar和imu标定
文章目录 下载并安装lidar_align安装nlopt迁移NLOPTConfig.cmake修改loader.cpp文件编译并运行 下载并安装lidar_align mkdir -p lidar_align/src cd lidar_align/src git clone https://github.com/ethz-asl/lidar_align.git安装nlopt git clone http://github.com/steven…...

牛客NC93 设计LRU缓存结构【hard 链表,Map Java】
题目 题目链接: https://www.nowcoder.com/practice/5dfded165916435d9defb053c63f1e84 思路 双向链表map最新的数据放头结点,尾节点放最老的数据,没次移除尾巴节点本地考察链表的新增,删除,移动节点参考答案Java im…...
机器学习和深度学习 -- 李宏毅(笔记与个人理解1-6)
机器学习和深度学习教程 – 李宏毅(笔记与个人理解) day1 课程内容 什么是机器学习 找函数关键技术(深度学习) 函数 – 类神经网络来表示 ;输入输出可以是 向量或者矩阵等如何找到函数: supervised Lear…...

低功耗全极霍尔开关芯片 D02,磁性开关点精确,对工艺和温度变化不敏感
1、概述 D02 是一款低功耗全极霍尔开关,用于检测施加的磁通量密度,并提供一个数字输出,该输出指示所感测磁通量幅度的当前状态。这些应用的一个例子是翻盖手机中的 ON/OFF 开关。微功耗设计特别适合电池供电系统,如手机或笔记本电…...
初识--数据结构
什么是数据结构?我们为什么要学习数据结构呢....一系列的问题就促使我们不得不了解数据结构。我们不禁要问了,学习C语言不就够了吗?为什么还要学习数据结构呢?这是因为:数据结构能够解决C语言解决不了的问题࿰…...

人工智能前沿成科技竞争新高地
以下文章来源:经济参考报 近日,首届中国具身智能大会(CEAI 2024)在上海举行。作为人工智能领域的前沿热点,具身智能正逐步走进现实,成为当前全球科技竞争的新高地、未来产业的新赛道、经济发展的新引擎。 “…...

【算法刷题day23】Leetcode:669. 修剪二叉搜索树、108. 将有序数组转换为二叉搜索树、538. 把二叉搜索树转换为累加树
文章目录 Leetcode 669. 修剪二叉搜索树解题思路代码总结 Leetcode 108. 将有序数组转换为二叉搜索树解题思路代码总结 Leetcode 538. 把二叉搜索树转换为累加树解题思路代码总结 草稿图网站 java的Deque Leetcode 669. 修剪二叉搜索树 题目:669. 修剪二叉搜索树 解…...

设计一个会议管理系统100问?
会议管理系统的基本功能有哪些?如何确保会议管理系统的安全性?会议管理系统可以支持多少种不同类型的会议?是否有权限管理功能?是否支持会议室预订功能?会议管理系统可以导入外部参与者信息吗?是否支持多种…...
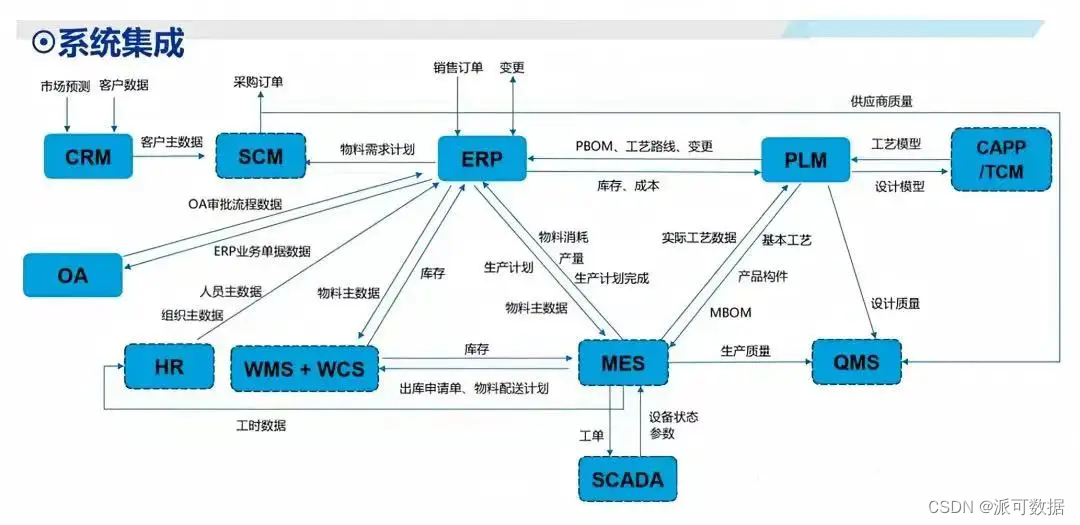
一文搞懂BI、ERP、MES、SCM、PLM、CRM、WMS、APS、SCADA、QMS
在企业信息化数字化过程中我们经常遇到很多系统,比如:MES、ERP、SCM、WMS、APS、SCADA、PLM、QMS、CRM、EAM、BI,这些都是什么系统?有什么功能和作用?它们之间的关系是怎样的? 今天就一文简单分享。 术语 …...
)
全量知识系统 程序详细设计 之 先验逻辑-实现:从“平凡”回到“平凡” (QA 百度搜索)
Q1. 思考:数学中的平凡,和程序中的平凡(比如POJO)、语言中的平凡(比如纯文本),数据中的平凡(比如 Number)。因为我设计中的全知系统将设计的三个方面刻画为语言设计、程序…...
注解(Annotation) --java学习笔记
注解 就是Java代码里的特殊标记,比如:Override、Test等,作用是:让其他程序根据注解信息来决定怎么执行该程序注意:注解可以用在类上、构造器上、方法上、成员变量上、参数上、等位置处 自定义注解 就是自己定义注解 自定义注解到底该怎么写:…...

uniapp 小程序获取WiFi列表
<template><view ><button click"getWifiList">获取WiFi列表</button><scroll-view:scroll-top"scrollTop"scroll-yclass"content-pop"><viewclass"itemInfo"v-for"(item, index) in wifiList&…...

数据可视化-ECharts Html项目实战(11)
在之前的文章中,我们学习了如何在ECharts中特殊图表的双y图以及自定义形状词云图。想了解的朋友可以查看这篇文章。同时,希望我的文章能帮助到你,如果觉得我的文章写的不错,请留下你宝贵的点赞,谢谢。 数据可视化-ECh…...

【MySQL数据库 | 第二十四篇】Limit语句的性能问题和调优策略
前言: MySQL作为最流行的关系型数据库管理系统之一,被广泛应用于各种规模和类型的应用程序中。其强大的功能和灵活的查询语言使得开发人员能够高效地执行各种数据操作和分析。 然而,在处理大量数据或复杂查询时,一些开发人员可能…...

【数据结构】两两交换链表 复制带随机指针的链表
问题描述1 给你一个链表,两两交换其中相邻的节点,并返回交换后链表的头节点。你必须在不修改节点内部的值的情况下完成本题(即,只能进行节点交换)。 求解 使用一个栈S来存储相邻两个节点即可 /*** Definition for…...
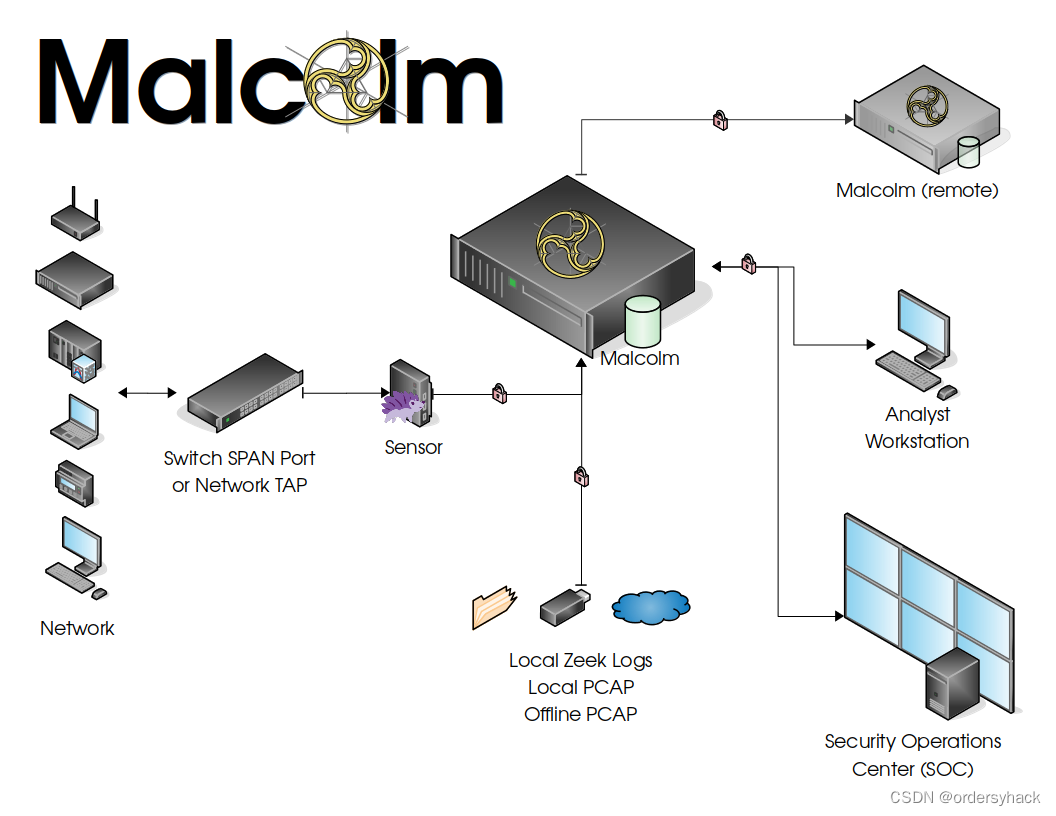
网络安全流量平台_优缺点分析
FlowShadow(流影),Ntm(派网),Elastiflow。 Arkimesuricata,QNSMsuricata,Malcolm套件。 Malcolm套件优点:支持文件还原反病毒引擎(clamav/yara)…...
【c语言】自定义类型:结构体详解
目录 自定义类型:结构体 结构体类型的声明 结构体变量的创建和初始化 结构的特殊声明 结构的自引用 结构体内存对齐 对其规则 为什么存在内存对齐? 修改默认对⻬数 结构体传参 结构体实现位段 位段的内存分配 位段的跨平台问题 位段的应用…...

利用AbortController,取消正在发送的请求
参考文章:https://blog.csdn.net/qq_45560350/article/details/130588101 解决问题:再图层中点击仓库的时候,点击后又取消掉,我们希望这个请求可以被取消掉,我们口可以利用AbortController控制器对象 实操:…...

dockerhub右键快速搜索脚本
Chrome 浏览器扩展的后台脚本,用于创建右键菜单项,并根据用户的操作在新的标签页中打开 Docker Hub 网站或者进行搜索。 // 创建右键菜单项,用于打开 Docker Hub 网站 chrome.contextMenus.create({id: search-home, // 菜单项的唯一标识符t…...

类似微信的以文搜图功能实现
通过PaddleOCR识别图片中的文字,将识别结果报存到es中,利用es查询语句返回结果图片。 技术逻辑 PaddleOCR部署、es部署创建mapping将PaddleOCR识别结果保存至es通过查询,返回结果 前期准备 PaddleOCR、es部署请参考https://blog.csdn.net…...

Qwen3.5-4B模型在嵌入式系统日志智能分析中的实践
Qwen3.5-4B模型在嵌入式系统日志智能分析中的实践 1. 嵌入式日志分析的痛点与机遇 在物联网网关、工业控制器等嵌入式设备运行过程中,系统日志就像设备的"健康日记",记录着每一次心跳、每一次异常。传统运维人员需要像"破译密码"一…...
)
【2026年最新600套毕设项目分享】基于springboot+vue的无人机共享管理系统(14299)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...

突破网盘下载限制:直链工具全攻略
突破网盘下载限制:直链工具全攻略 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 / 迅雷云盘 / 夸…...

Nginx + FFmpeg 核心配置
Nginx FFmpeg 核心配置(2 种最实用方案)我给你最简、能直接用的配置,不用你自己改半天,分两种场景:Nginx 接收 FFmpeg 推流(直播)Nginx 调用 FFmpeg 自动转码(高清 / 标清ÿ…...

告别复杂配置!OSHI+JNA五分钟搞定Windows/Linux/macOS硬件信息采集
五分钟极简指南:用OSHIJNA实现全平台硬件监控零门槛接入 运维工程师小张最近接手了公司混合云环境下的服务器监控任务。当他面对Windows服务器、Linux虚拟机、macOS开发机三种不同系统时,传统方案需要分别调用WMI、/proc文件系统和system_profiler&#…...

Unity 实现Slot Machine两种动态停止效果的实战解析
1. 老虎机效果设计核心思路 老虎机作为经典游戏机制,其动态停止效果直接影响玩家的游戏体验。在Unity中实现这类效果时,我们需要考虑两个关键因素:物理真实感和心理预期管理。缓慢减速效果通过逐渐降低转速营造紧张氛围,而惯性回弹…...

Git【多人协作一】
目前,基本上可以完成的工作如下:基本完成Git的所有本地库的相关操作,git 基本操作,分支理解,版本回退,冲突解决等等申请码云账号,将远端信息clone到本地,以及推送和力量去。但是&…...

从v4l2-ctl命令到media拓扑:手把手教你调试RK3568上的OV8858摄像头图像
RK3568平台OV8858摄像头深度调试实战:从硬件链路到图像优化的全流程解析 当你在RK3568平台上调试OV8858摄像头时,是否遇到过这样的场景:设备树配置看似正确,但摄像头输出的图像却出现花屏、颜色异常或干脆没有信号?作为…...

实战指南:为spring boot项目快速配置最优jdk环境,助力应用高效部署
最近在准备一个Spring Boot项目时,发现JDK环境配置这个看似简单的环节其实藏着不少学问。特别是当项目需要兼顾开发效率和生产环境稳定性时,合理的JDK配置方案就显得尤为重要。今天就来分享下我的实战经验,以及如何利用工具快速搞定这些配置。…...

告别手动处理:用快马AI一键生成你的专属批量链接效率工具
最近在整理项目文档时,经常需要处理大量杂乱无章的链接。手动一个个检查、格式化这些链接不仅耗时耗力,还容易出错。于是我开始寻找更高效的解决方案,最终在InsCode(快马)平台上快速实现了一个批量链接处理工具,整个过程比想象中简…...