STM32之FreeRTOS移植
1.FreeRTOS的移植过程是将系统需要的文件和代码进行移植和裁剪,其移植的主要过程为:
(1)官网上下载FreeRTOS源码:https://www.freertos.org/
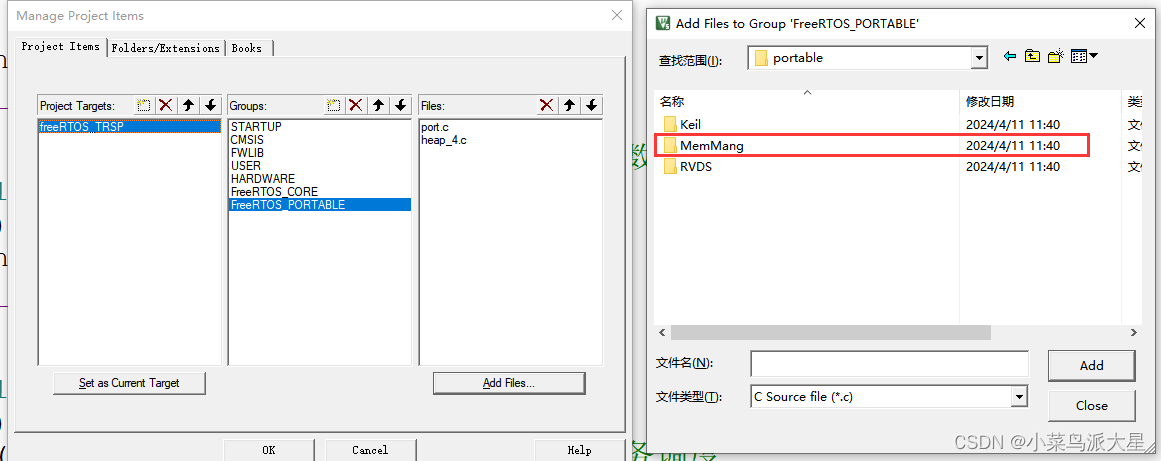
(2)移植文件夹,在portable文件夹中只需要保留:Keil、MemMang、RVDS。
(3)代码中的裁剪,修改相关的宏定义。
2.移植文件夹:
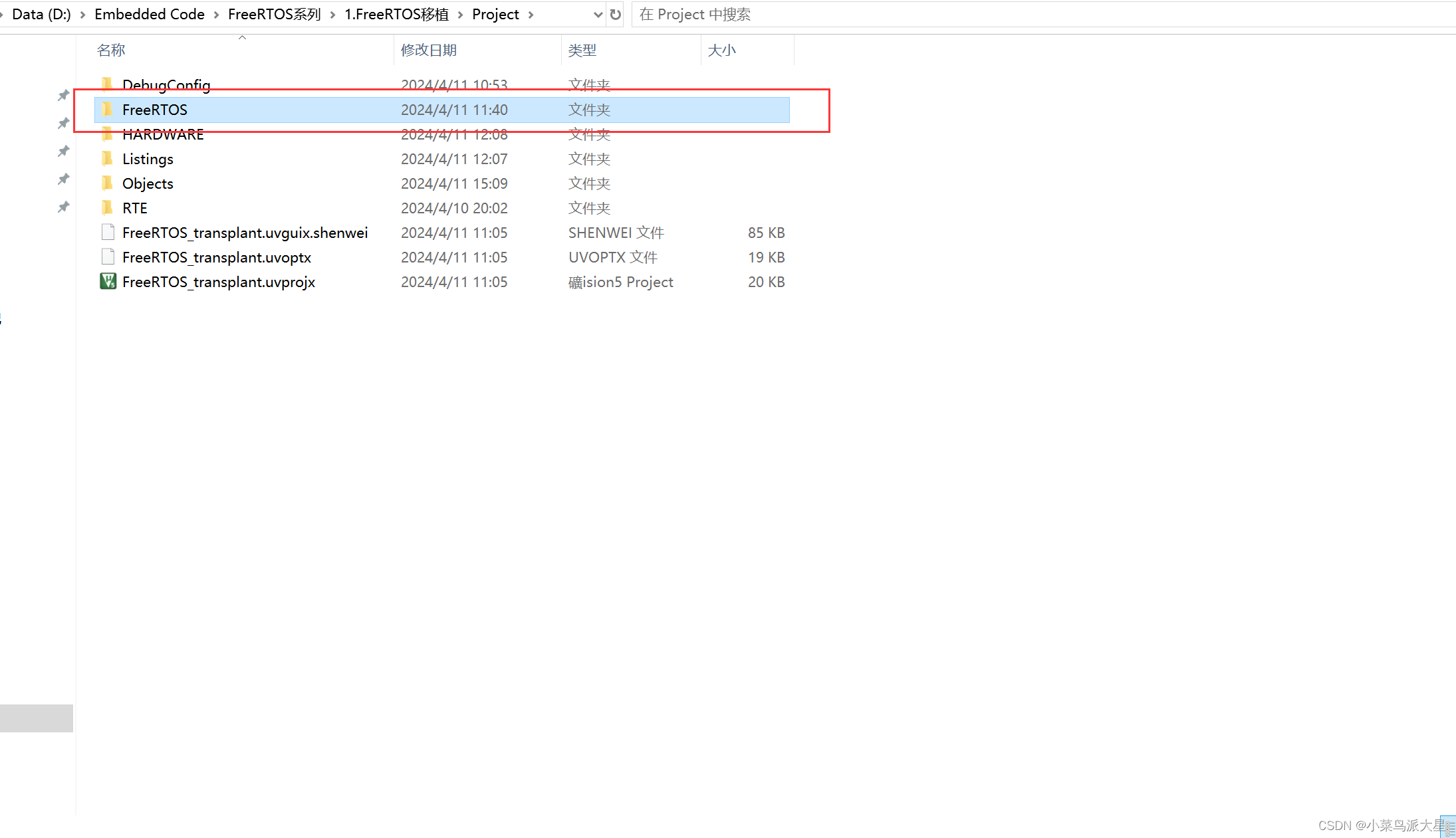
(1)首先在Keil的基本工程模板中创建一个文件夹FreeRTOS,用来存放FreeRTOS的源码:
(2)将如下三个文件夹导入到FreeRTOS目录下:
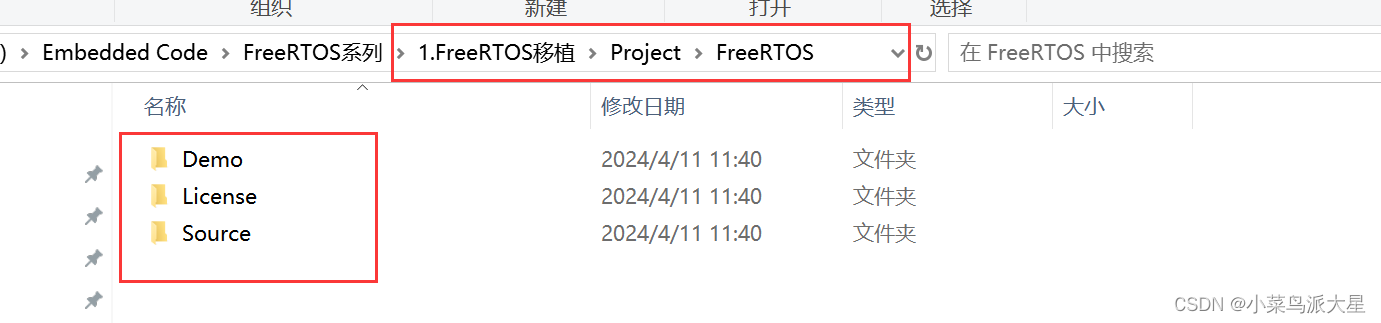
其中,Demo中存放的参考例程。License中是相关的许可信息。Source中便是FreeRTOS的源码。
(3)裁剪Source中的文件:
Source中的文件信息如下
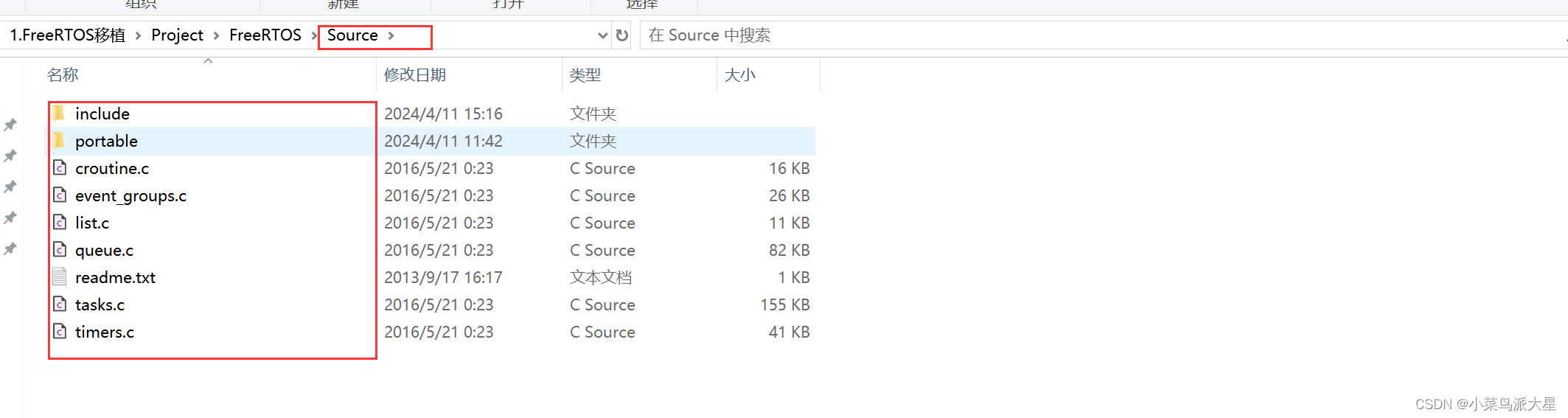
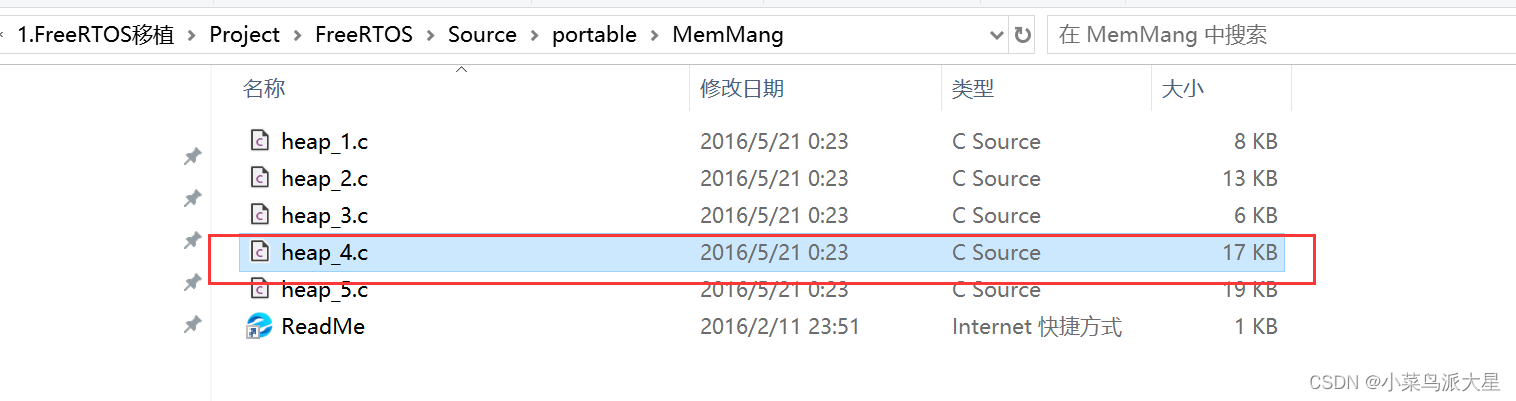
portable中存放是FreeRTOS和硬件之间的接口桥梁,在portable中只需要保留如下三个文件夹即可。
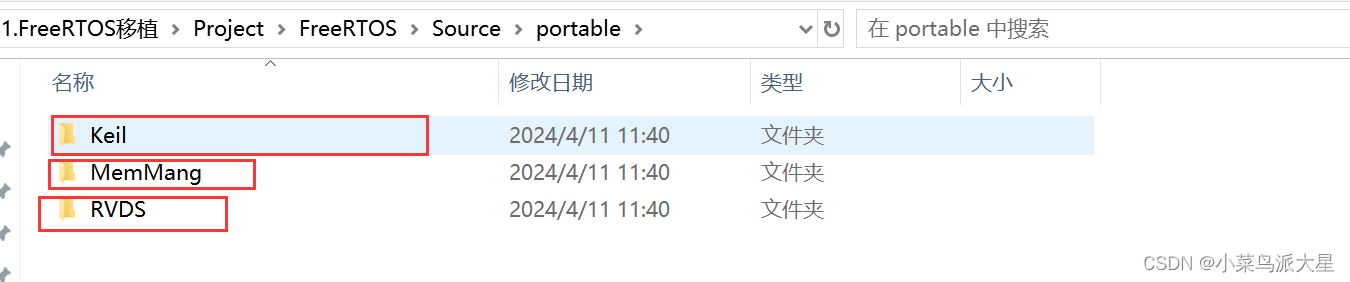
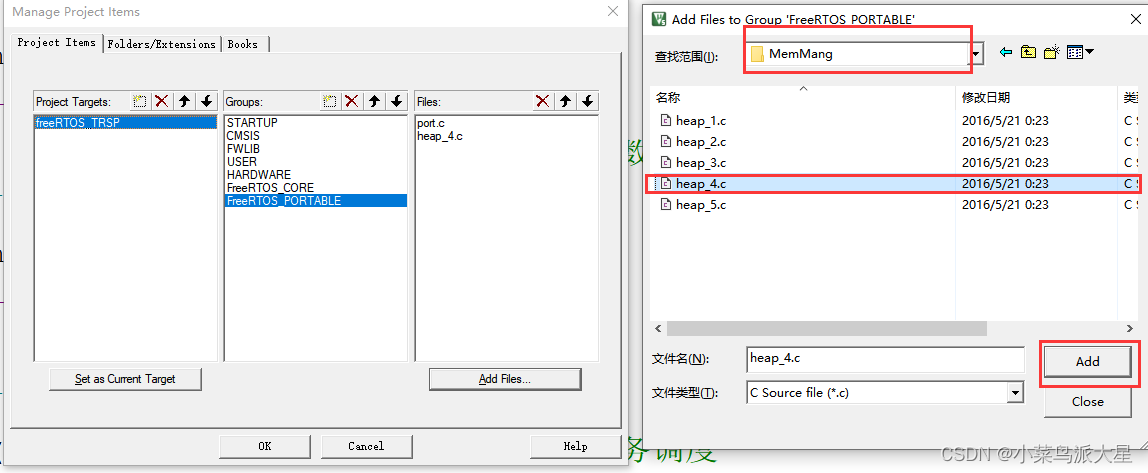
MemMang中存放是内存管理相关的算法文件,本文选择heap_c.c。
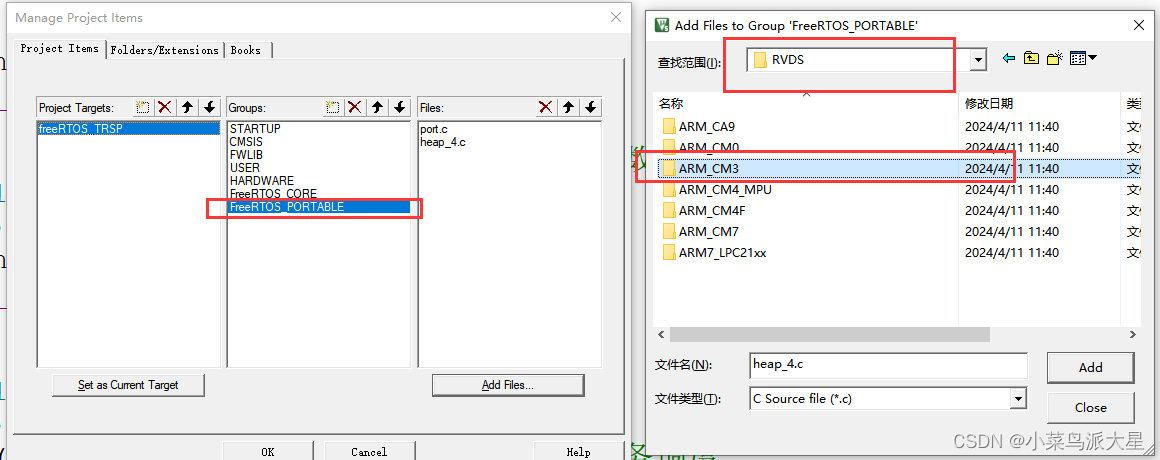
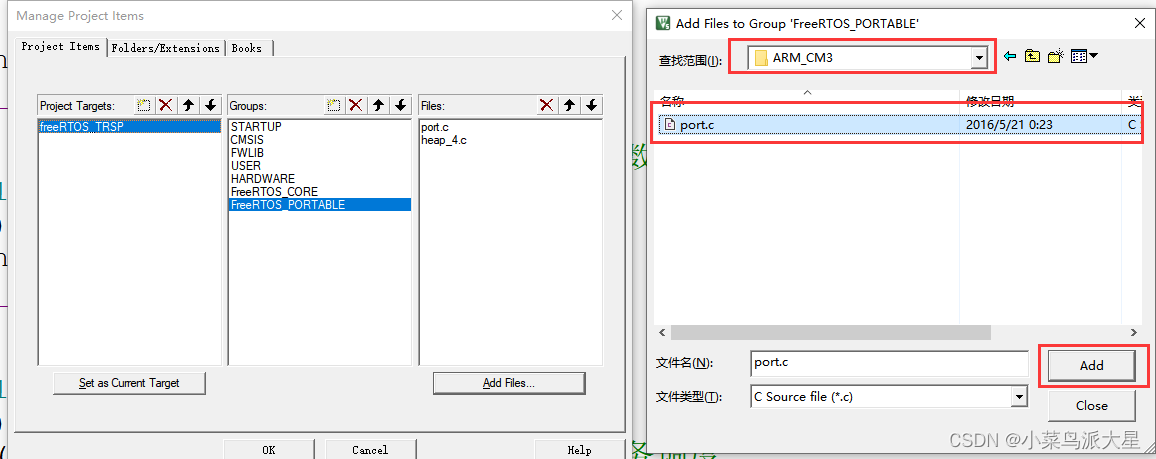
RVDS和Keil中存放是软件和硬件之间的接口文件。本文的STM32是Coretex-M3系列,所以需要选择ARM_CM3。


3.创建工程文件:
在基础工程文件中创建两个如下两个文件夹用来存放FreeRTOS相关的文件:
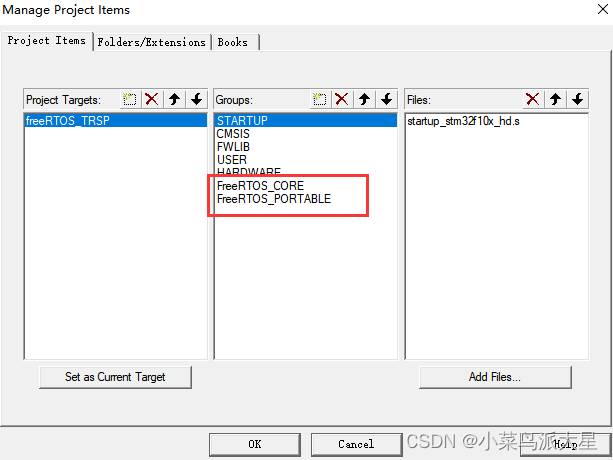
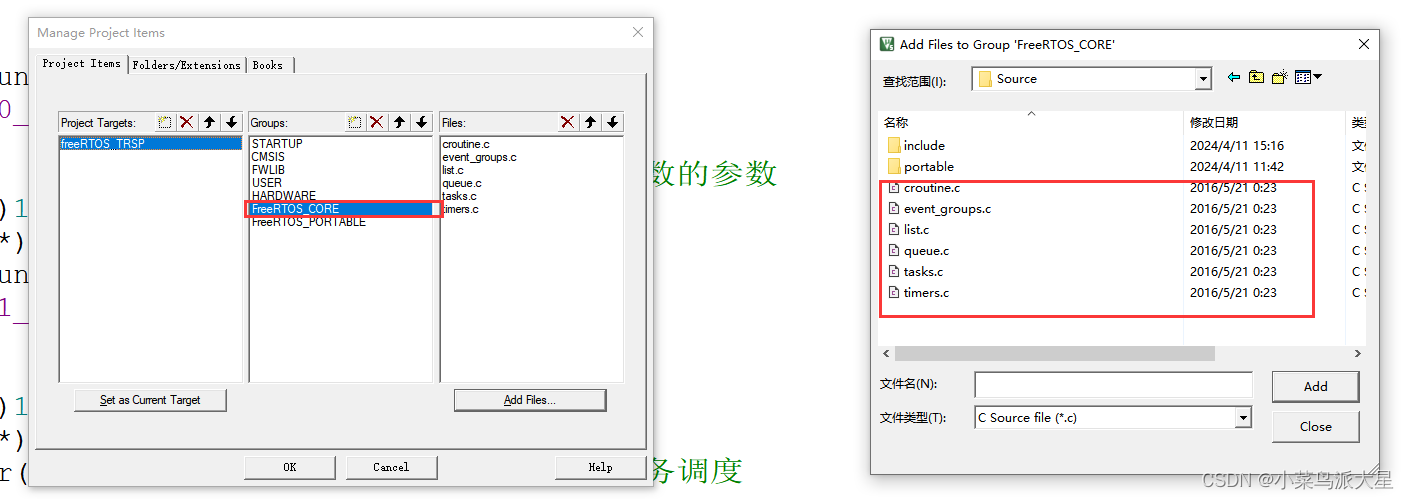
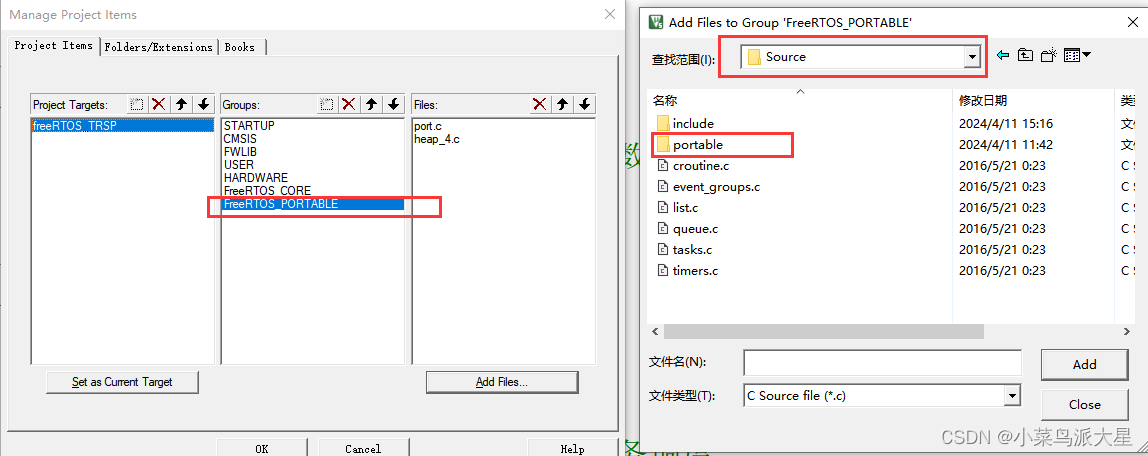
添加文件:
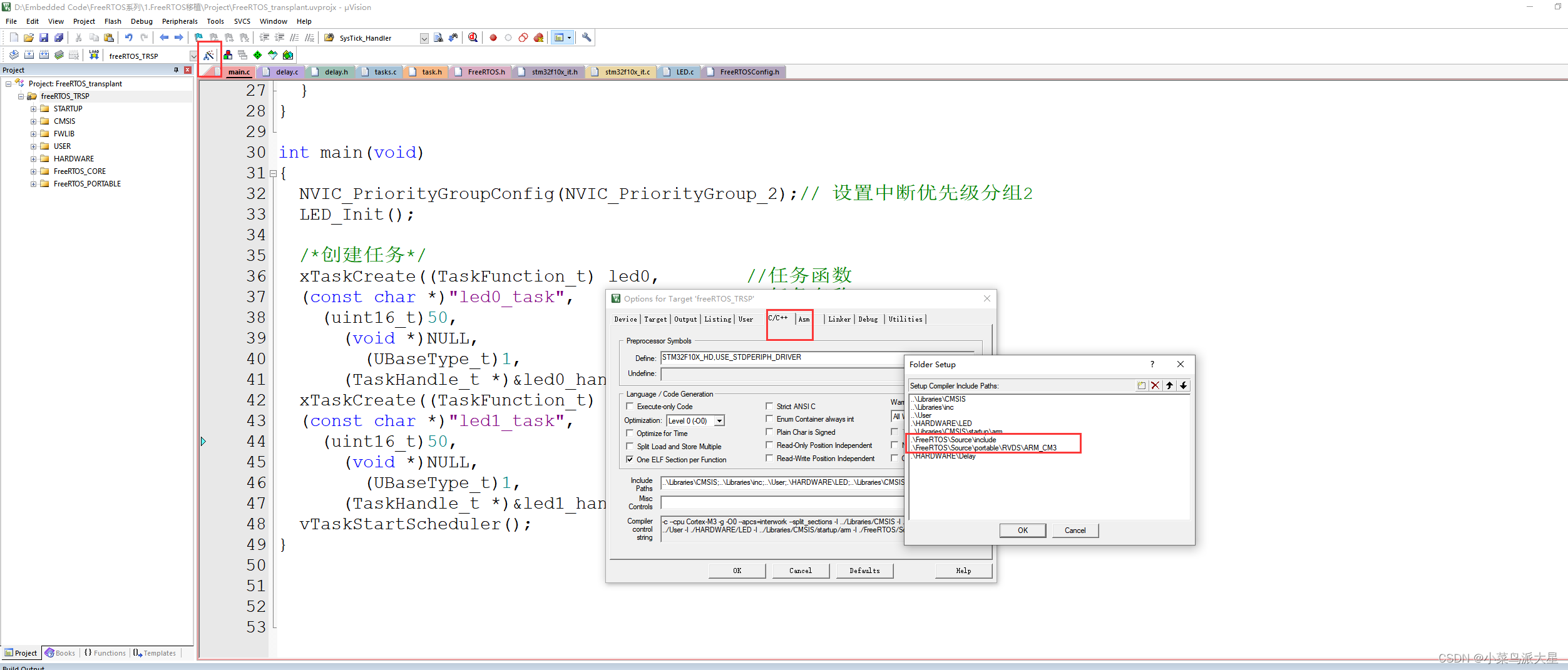
4.导入头文件的路径:
5.移植FreeRTOSConfig.h文件:
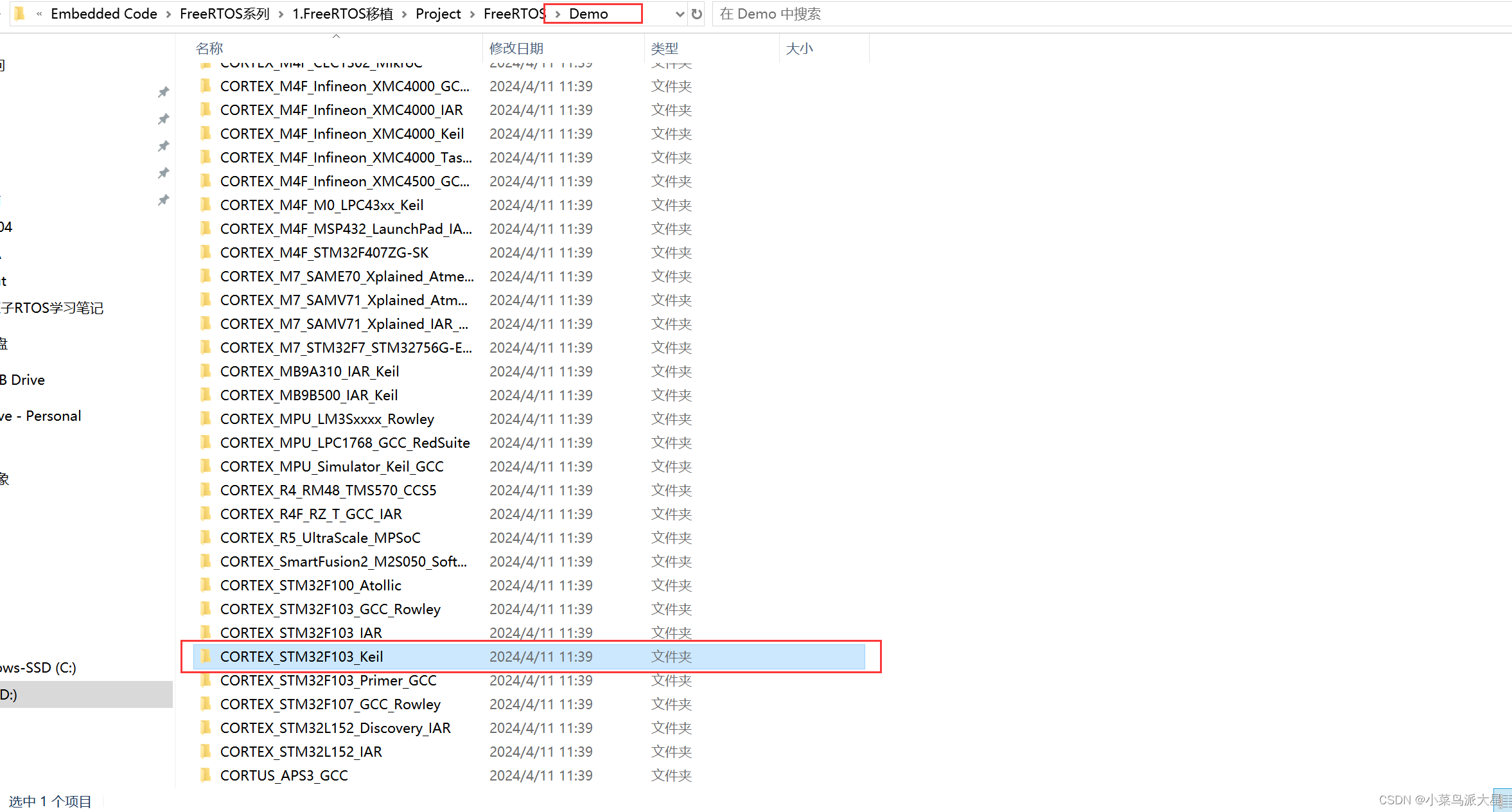
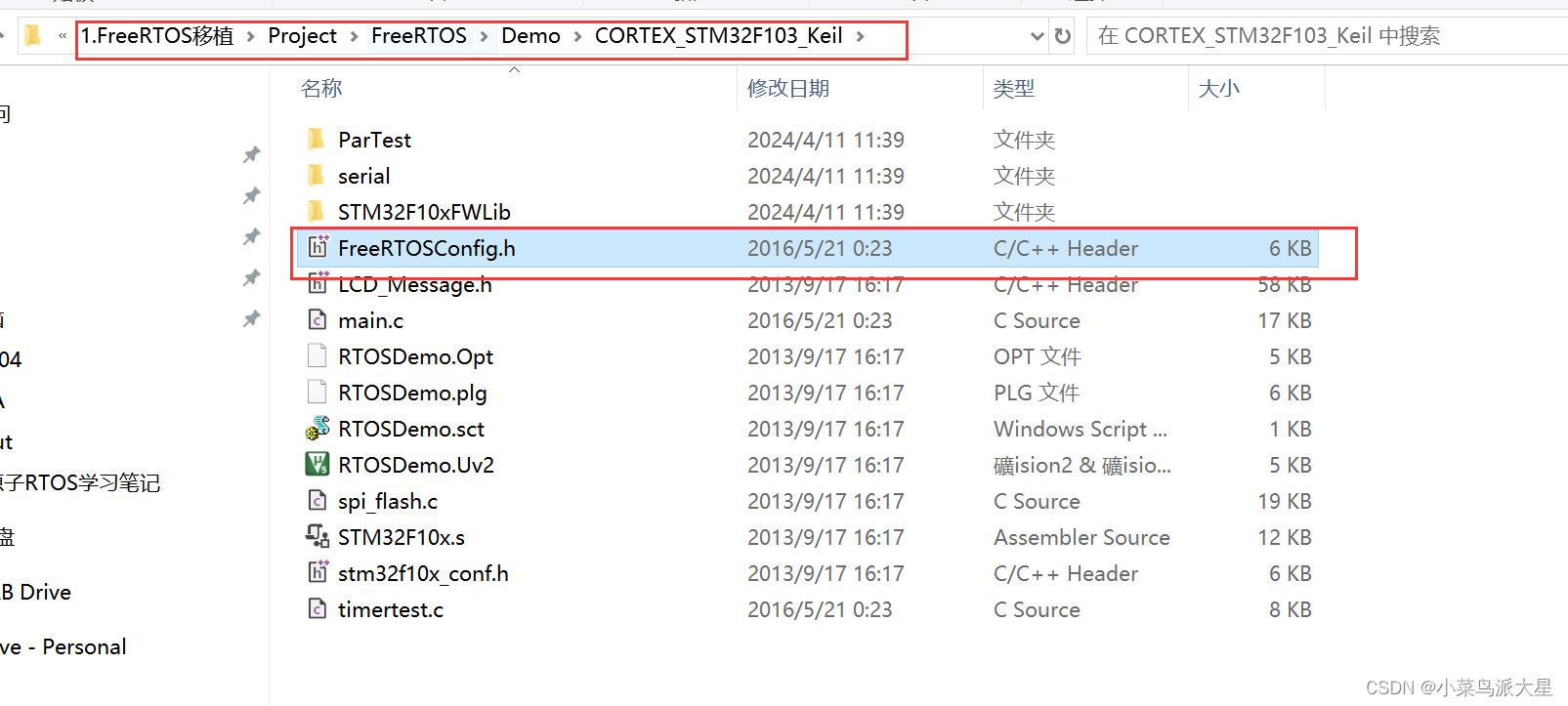
FreeRTOSConfig.h是FreeRTOS的配置文件,通常FreeRTOS的裁剪都是通过修改此文件中的宏定义来实现。选择芯片序号和开发环境对应的文件:
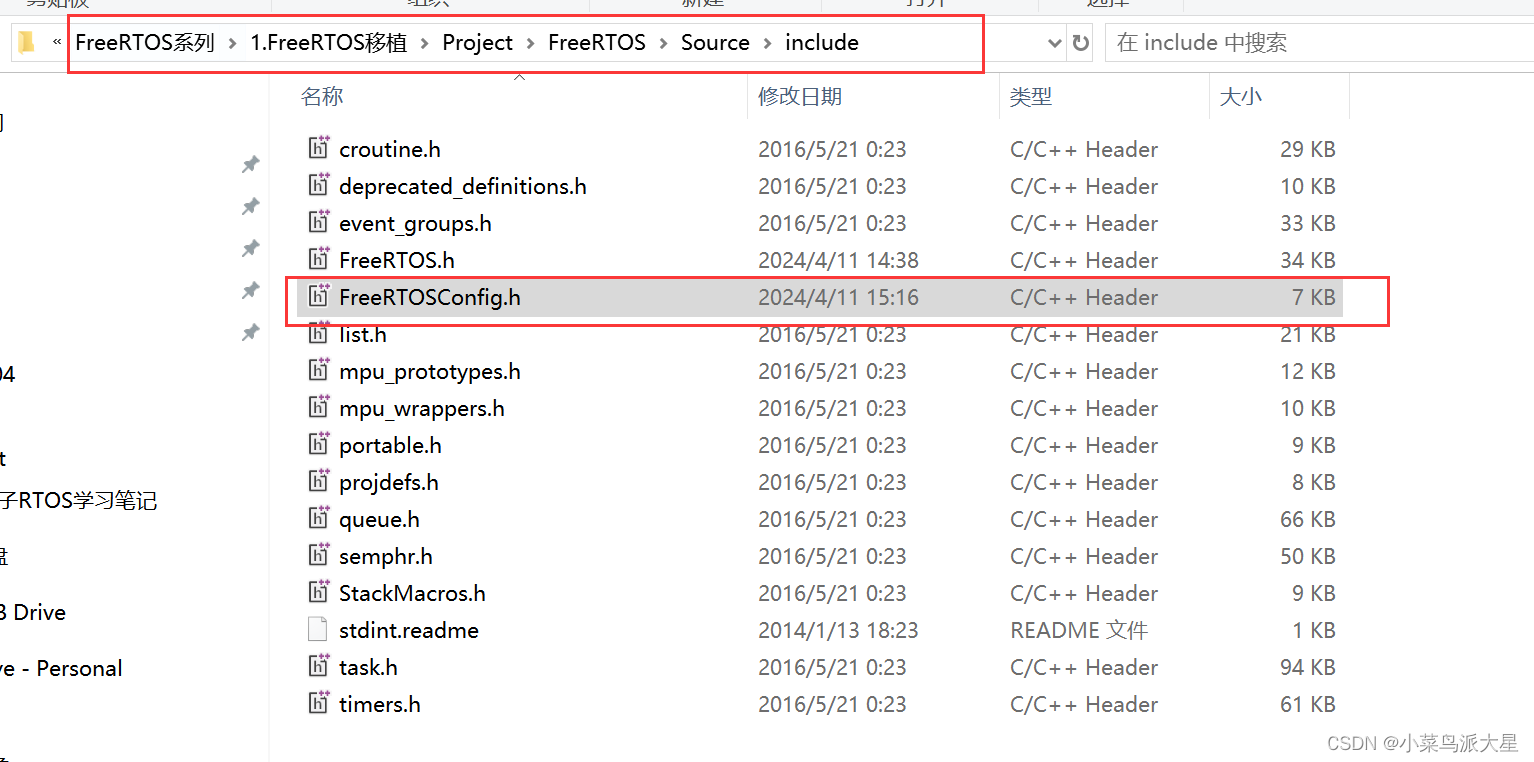
将FreeRTOSConfig.h复制到自己的工程文件下,本文将FreeRTOSConfig.h放在include文件夹下:
6.代码裁剪:
(1)添加宏定义,将STM32的PendSV_Handler、SVC_Handler、SysTick_Handler映射到FreeRTOS中。在FreeRTOS中添加如下三个宏定义:

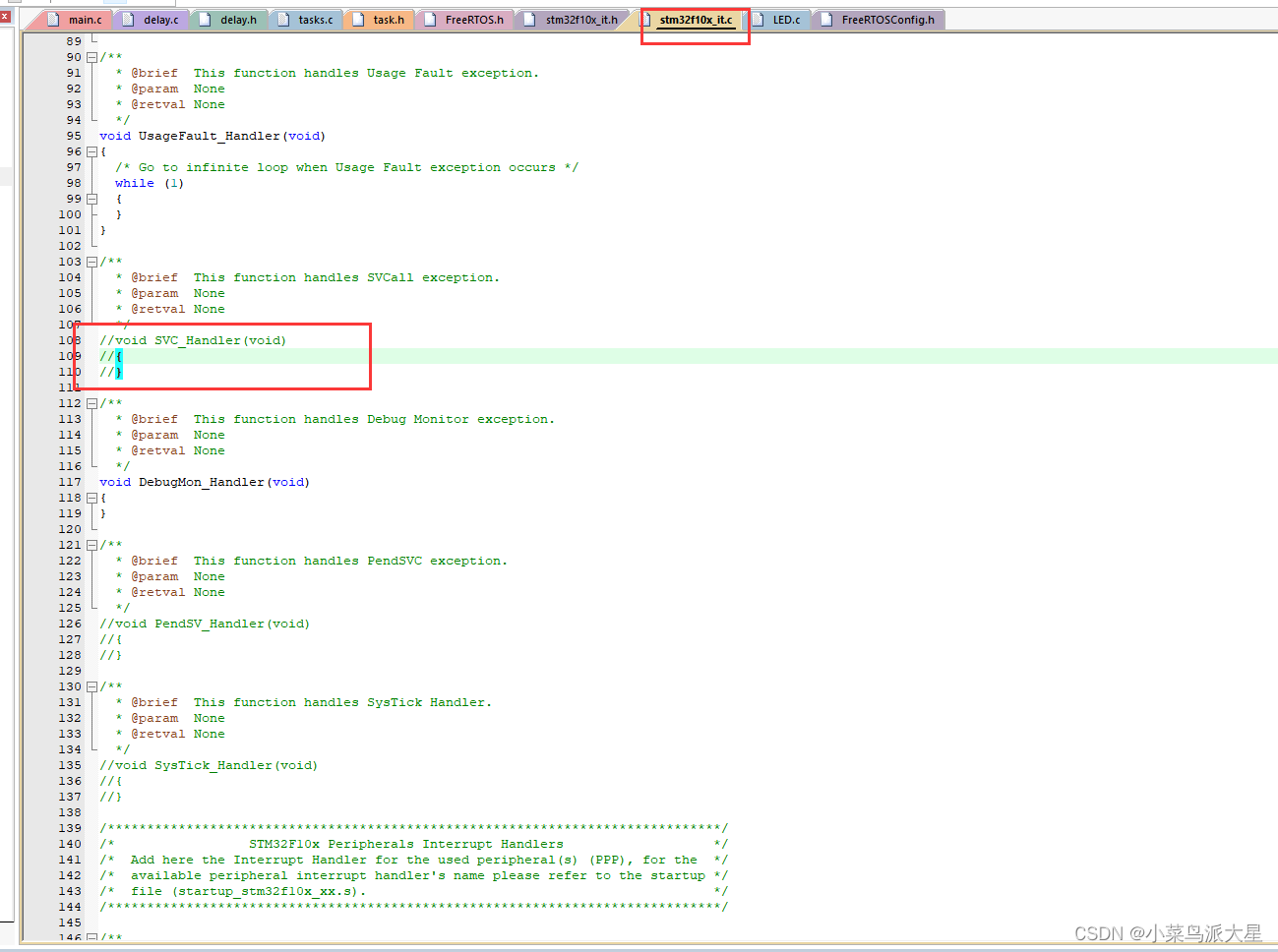
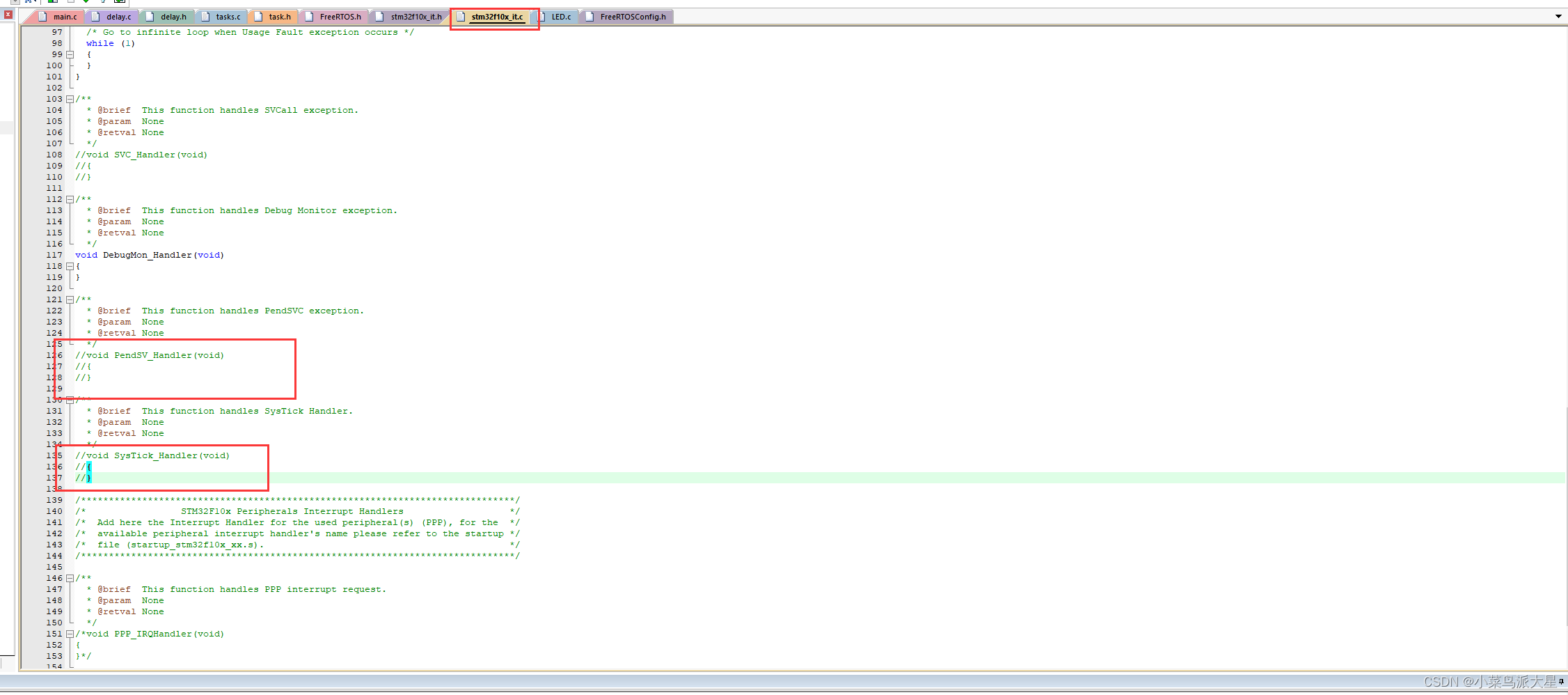
(2)注释stm32f10x_it.c中的SysTick_Handler()、SVC_Handler()和 PendSV_Handler()三个中断服务函数。因为在FreeRTOS中已经重新定义了这三个中断服务函数,所以此处需要注释,防止重复定义。
7.创建任务:
(1)led.c
#include "led.h"void LED_Init(void)
{//¶¨Òå¶Ë¿ÚµÄ½á¹¹Ìå:GPIO_InitTypeDef GPIO_InitStruct;//1.ʹÄÜʱÖÓ£ºRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOA,ENABLE);//2.ÅäÖö˿ڽṹÌåµÄÏà¹ØÐÅÏ¢£º£¨LED1£©GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD,&GPIO_InitStruct);//ÅäÖÃLED0£ºGPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOA,&GPIO_InitStruct);//³õʼʱ½«LEDµÄ¶Ë¿Ú¶¼ÖÃΪ1£¬¼´Ï¨ÃðGPIO_SetBits(GPIOA,GPIO_Pin_8);GPIO_SetBits(GPIOD,GPIO_Pin_2);
}(2)main.c:
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "FreeRTOS.h"
#include "task.h"TaskHandle_t led0_handler;
TaskHandle_t led1_handler;void led0(void)
{while(1){GPIO_ResetBits(GPIOA,GPIO_Pin_8); //´ò¿ªLEDvTaskDelay(500);GPIO_SetBits(GPIOA,GPIO_Pin_8); //´ò¿ªLEDvTaskDelay(500);}
}void led1(void)
{while(1){GPIO_ResetBits(GPIOD,GPIO_Pin_2); //´ò¿ªLEDvTaskDelay(1000);GPIO_SetBits(GPIOD,GPIO_Pin_2); //´ò¿ªLEDvTaskDelay(1000);}
}int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// ÉèÖÃÖжÏÓÅÏȼ¶·Ö×é2LED_Init();/*´´½¨ÈÎÎñ*/xTaskCreate((TaskFunction_t) led0, //ÈÎÎñº¯Êý(const char *)"led0_task", //ÈÎÎñÃû³Æ(uint16_t)50, //ÈÎÎñ¶ÑÕ»´óС(void *)NULL, //´«µÝ¸øÈÎÎñº¯ÊýµÄ²ÎÊý(UBaseType_t)1, //ÈÎÎñÓÅÏȼ¶(TaskHandle_t *)&led0_handler); //ÈÎÎñ¾ä±úxTaskCreate((TaskFunction_t) led1,(const char *)"led1_task",(uint16_t)50,(void *)NULL,(UBaseType_t)1,(TaskHandle_t *)&led1_handler);vTaskStartScheduler(); //¿ªÊ¼ÈÎÎñµ÷¶È
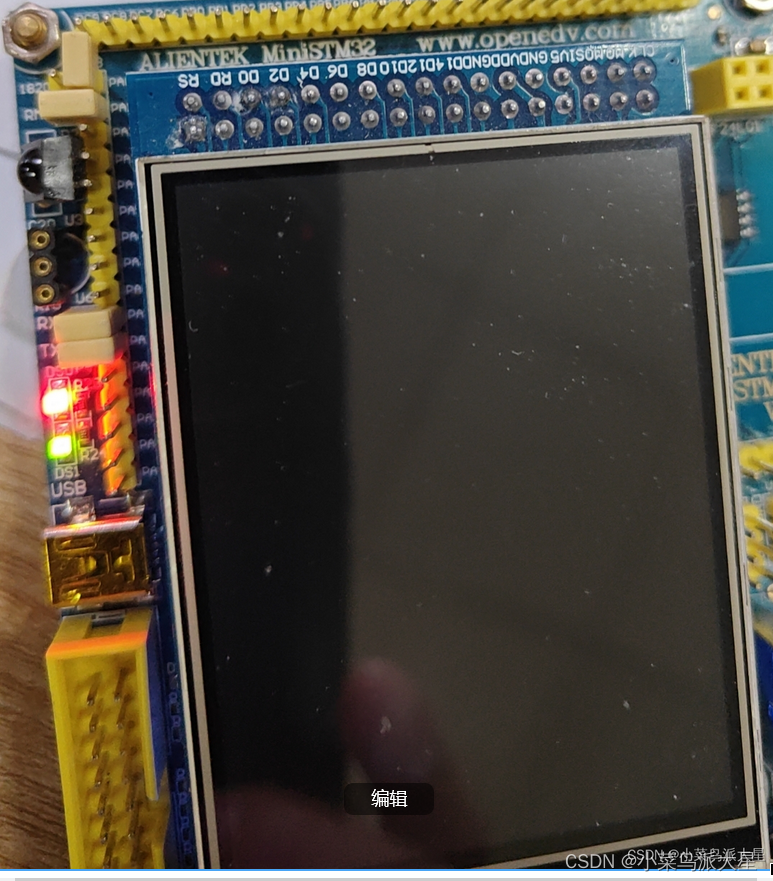
}8.运行结果:本文的运行结果是两个LED灯闪烁,其中led0每500ms闪烁一次,led1每1000ms闪烁一次。
9.总结:
FreeRTOS的移植过程主要是对相关的文件和代码进行裁剪。需要去了解每个文件夹中代码的大搞功能,才可以正确的移植文件。
此外,当使用xTaskGetSchedulerState()函数时,需要将FreeRTOS.h中的对应宏定义改为1:

相关文章:
STM32之FreeRTOS移植
1.FreeRTOS的移植过程是将系统需要的文件和代码进行移植和裁剪,其移植的主要过程为: (1)官网上下载FreeRTOS源码:https://www.freertos.org/ (2)移植文件夹,在portable文件夹中只需…...
-- 消息(Message)的简单认识)
SpringBoot实用开发(十四)-- 消息(Message)的简单认识
目录 1.消息的概念 2.Java处理消息的标准规范 3.JMS 4.AMQP 5.MQTT 1.消息的概念 广义角度来说,消息其实就是信息,但是和信息又有所不同。信息通常被定义为一组数据,而消息除了具有数据的特征之外,还有...
【Spring Boot 源码学习】SpringApplication 的 run 方法核心流程介绍
《Spring Boot 源码学习系列》 SpringApplication 的 run 方法核心流程介绍 一、引言二、往期内容三、主要内容3.1 run 方法源码初识3.2 引导上下文 BootstrapContext3.3 系统属性【java.awt.headless】3.4 早期启动阶段3.5 准备和配置应用环境3.6 打印 Banner 信息3.7 新建应用…...
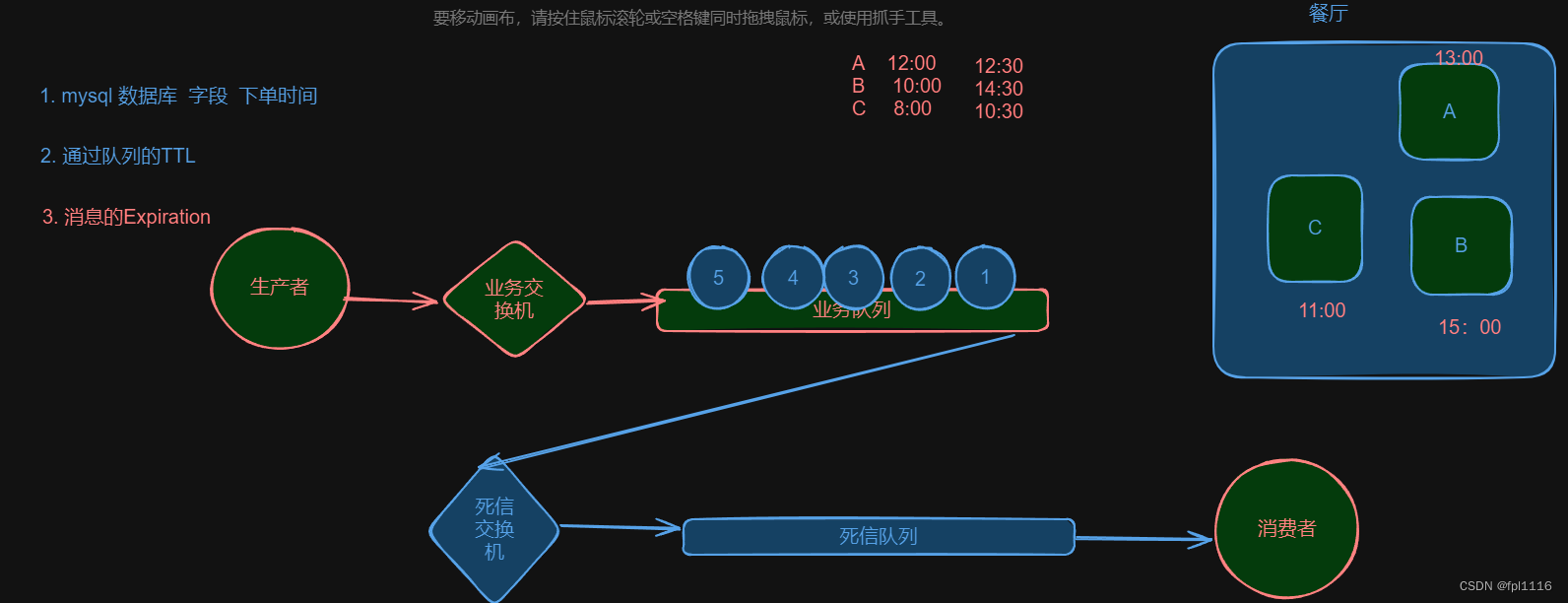
如何保证消息不丢失?——使用rabbitmq的死信队列!
如何保证消息不丢失?——使用rabbitmq的死信队列! 1、什么是死信 在 RabbitMQ 中充当主角的就是消息,在不同场景下,消息会有不同地表现。 死信就是消息在特定场景下的一种表现形式,这些场景包括: 消息被拒绝访问&am…...

html、css、京东移动端静态页面,资源免费分享,可作为参考,提供InsCode在线运行演示
CSDN将我上传的免费资源私自变成VIP专享资源,且作为作者的我不可修改为免费资源,不可删除,寻找客服无果,很愤怒,(我发布免费资源就是希望大家能免费一起用、一起学习),接下来继续寻找…...
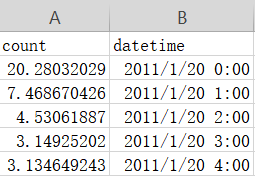
头歌-机器学习 第13次实验 特征工程——共享单车之租赁需求预估
第1关:数据探索与可视化 任务描述 本关任务:编写python代码,完成一天中不同时间段的平均租赁数量的可视化功能。 相关知识 为了完成本关任务,你需要掌握: 读取数据数据探索与可视化 读取数据 数据保存在./step1/…...
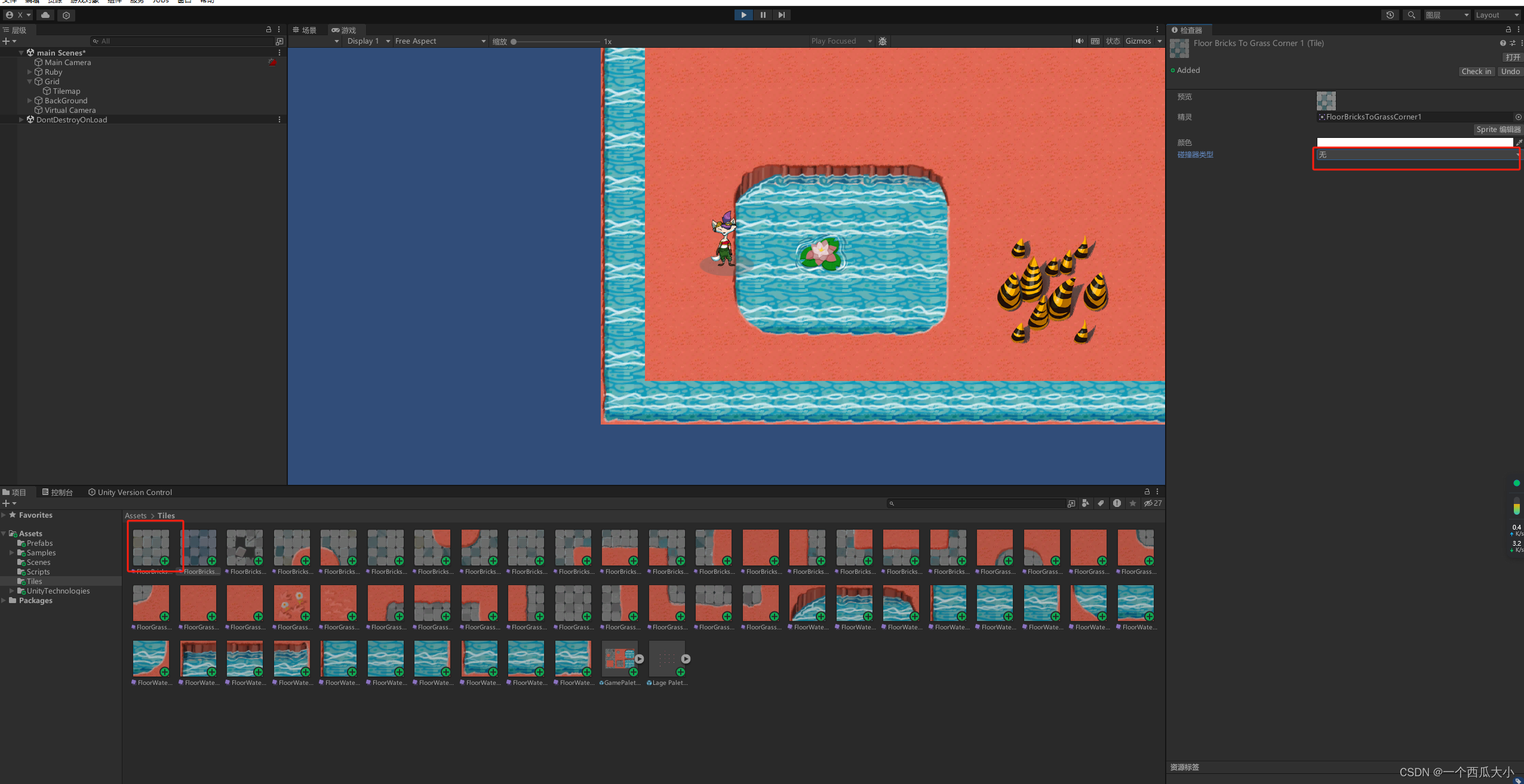
Unity 2D让相机跟随角色移动
相机跟随移动 最简单的方式通过插件Cinemachine 在窗口/包管理器选择全部找到Cinemachine,导入。然后在游戏对象/Cinemachine创建2D Camera。此时层级中创建一个2D相机。选中人物拖入检查器Follow。此时相机跟随人物移动。 修改相机视口距离 在检查器中Lens下调正…...
【面试题】s += 1 和 s = s + 1的区别
文章目录 1.问题2.发现过程3.解析 1.问题 以下两个程序真的完全等同吗? short s 0; s 1; short s 0; s s 1; 2.发现过程 初看s 1 和 s s 1好像是等价的,没有什么区别。很长一段时间内我也是这么觉得,因为当时学习c语言的时候教科书…...

ARM的学习
点亮流水灯 .text .global _start _start: 使能GPIOE的外设时钟 RCC_MP_AHB4ENSETR 0x50000a28 [4]->1LDR R0,0X50000A28 指定基地址LDR R1,[R0] 将寄存器数据读取出来保存到R1中ORR R1,R1,#(0x3<<4) [4]设置为1ORR R1,R1,#(0x3<<5) [5]设置为1STR …...
)
Restful API接口规范(以Django为例)
Restful API接口规范(以Django为例) Restful API的接口架构风格中制定了一些规范,极大的简化了前后端对接的时间,以及增加了开发效率 安全性保证–使用https路径中带 api标识路径中带版本号数据即资源,通常使用名词操作请求方式决定操作资源…...

AI助力,程序员压力倍增?
讲动人的故事,写懂人的代码 你知道程序员现在在AI辅助编程时最头疼的事情是什么吗?就是怎么在改代码的时候保住小命。 大家都听过程序员因为工作太累导致过劳湿的事情。 无论是写新功能、修bug,还是更改系统配置,都得改代码。 现在有了AI的帮助,本应该轻松很多,为什么…...

LoRA微调
论文:LoRA: Low-Rank Adaptation of Large Language Models 实现:microsoft/LoRA: Code for loralib, an implementation of “LoRA: Low-Rank Adaptation of Large Language Models” (github.com) 摘要 自然语言处理的一个重要的开发范式包括&#…...

45.基于SpringBoot + Vue实现的前后端分离-驾校预约学习系统(项目 + 论文)
项目介绍 本站是一个B/S模式系统,采用SpringBoot Vue框架,MYSQL数据库设计开发,充分保证系统的稳定性。系统具有界面清晰、操作简单,功能齐全的特点,使得基于SpringBoot Vue技术的驾校预约学习系统设计与实现管理工作…...
系统思考—时间滞延
“没有足够的时间是所有管理问题的一部分。”——彼得德鲁克 鱼和熊掌可以兼得,但并不能同时获得。在提出系统解决方案时,我们必须认识到并考虑到解决方案的实施通常会有必要的时间滞延。这种延迟有时比我们预想的要长得多,特别是当方案涉及…...

SSM项目转Springboot项目
SSM项目转Springboot项目 由于几年前写的一个ssm项目想转成springboot项目,所以今天倒腾了一下。 最近有人需要毕业设计转换一下,所以我有时间的话可以有偿帮忙转换,需要的私信我或+v:Arousala_ 首先创建一个新的spr…...

VUE3.0对比VUE2.0
vue3.0 与 vue2.0的不同之处有以下几点: 数据响应式原理 3.0基于Proxy的代理实现监测,vue2.0是基于Object.defineProperty实现监测。 vue2.0 通过Object.defineProperty,每个数据属性被定义成可观察的,具有getter和setter方法&…...
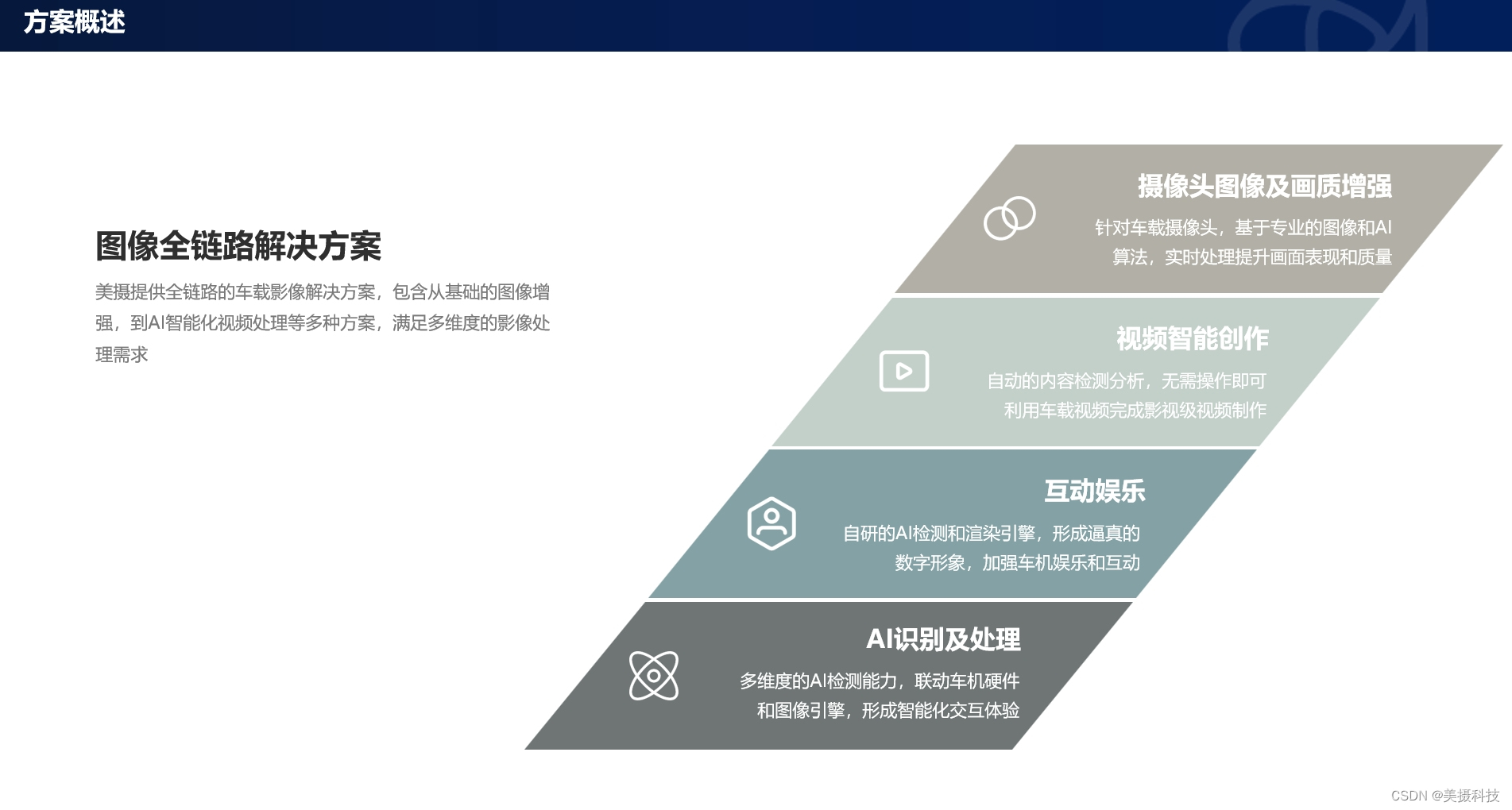
车内AR互动娱乐解决方案,打造沉浸式智能座舱体验
美摄科技凭借其卓越的创新能力,为企业带来了革命性的车内AR互动娱乐解决方案。该方案凭借自研的AI检测和渲染引擎,打造出逼真的数字形象,不仅丰富了车机娱乐内容,更提升了乘客与车辆的互动体验,让每一次出行都成为一场…...
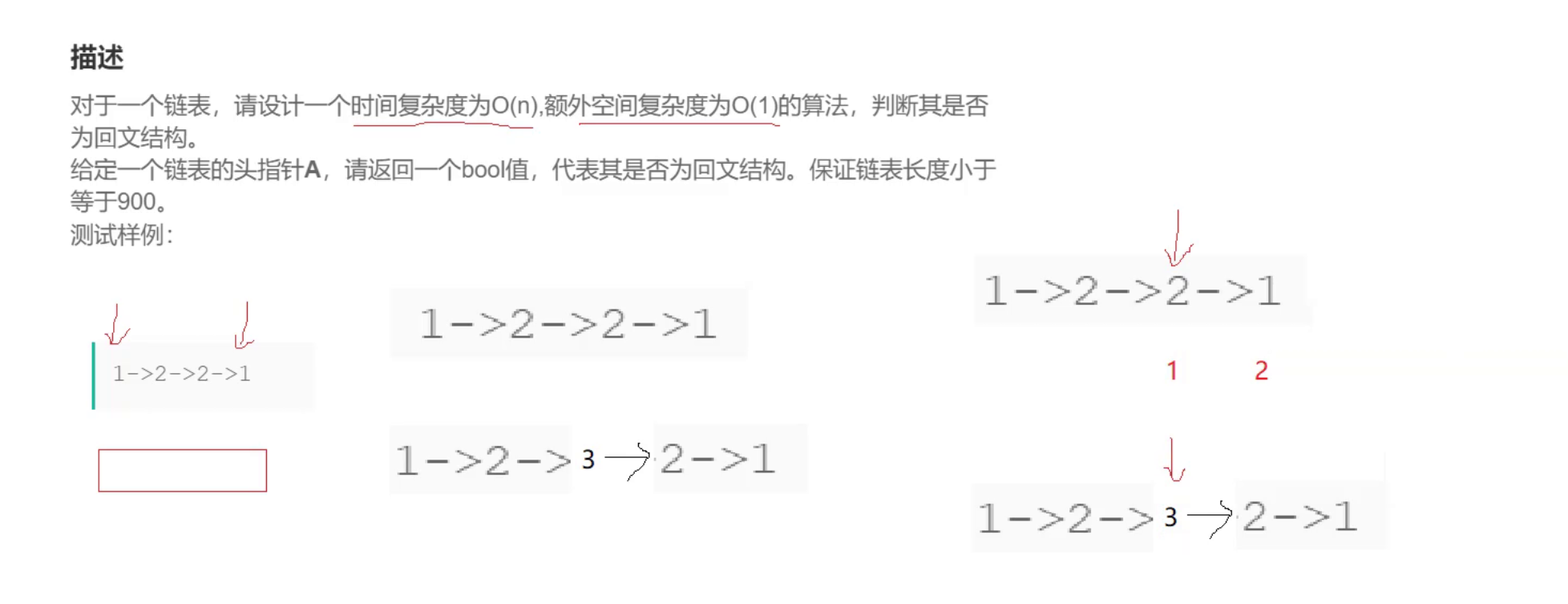
OR36 链表的回文结构
描述 对于一个链表,请设计一个时间复杂度为O(n),额外空间复杂度为O(1)的算法,判断其是否为回文结构。 给定一个链表的头指针A,请返回一个bool值,代表其是否为回文结构。保证链表长度小于等于900。 测试样例: 1->…...

【译】微调与人工引导: 语言模型调整中的 SFT 和 RLHF
原文地址:Fine-Tuning vs. Human Guidance: SFT and RLHF in Language Model Tuning 本文主要对监督微调(SFT, Supervised Fine Tuning )和人类反馈强化学习(RLHF, Reinforcement Learning from Human Feedback)进行简…...
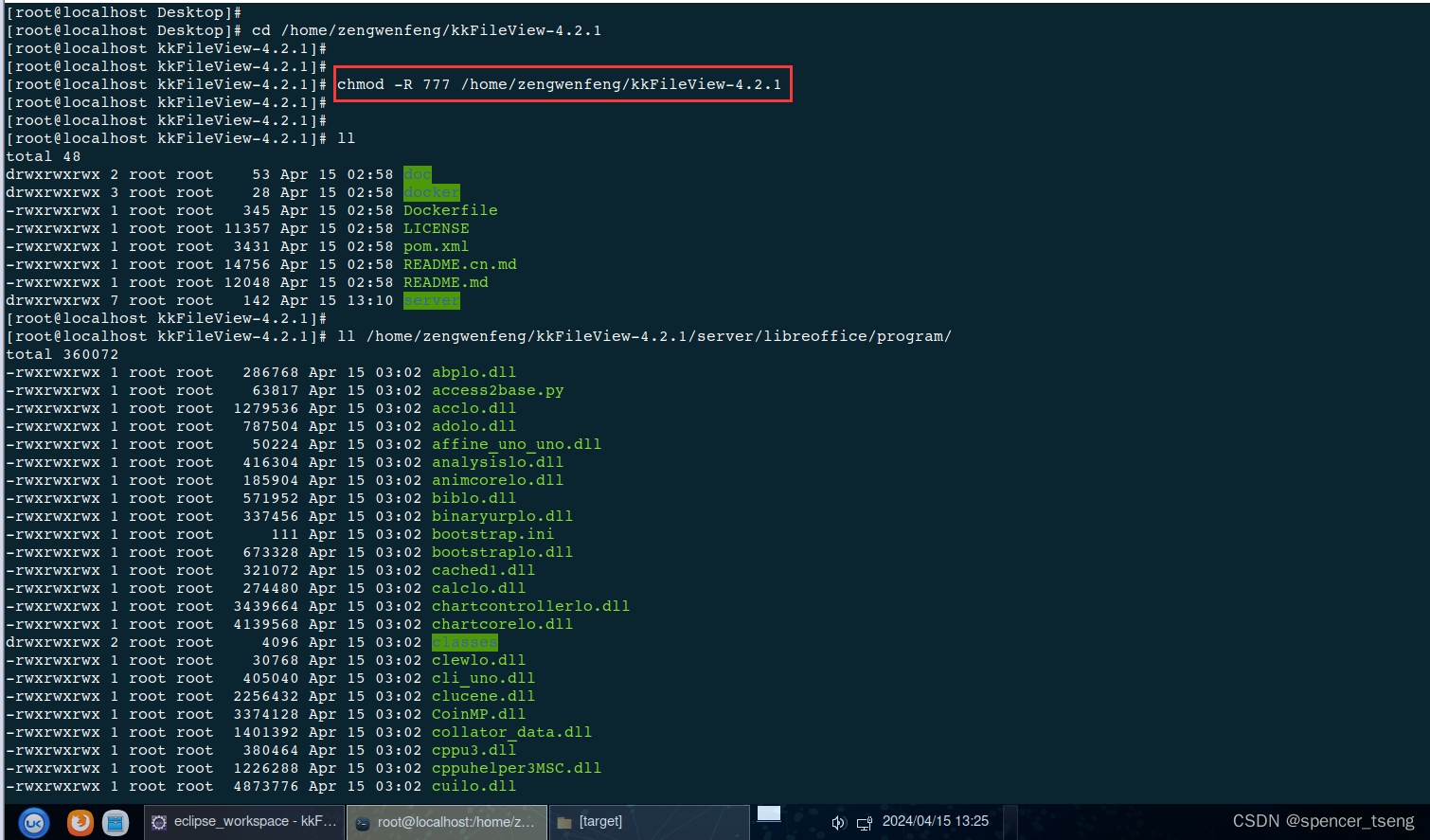
kylin java.io.IOException: error=13, Permission denied
linux centos7.8 error13, Permission denied_linux open error13-CSDN博客 chmod -R 777 /home/zengwenfeng/kkFileView-4.2.1 2024-04-15 13:15:17.416 WARN 3400 --- [er-offprocmng-1] o.j.l.office.LocalOfficeProcessManager : An I/O error prevents us to determine…...

5大架构决策原则:ComfyUI-Manager如何平衡技术演进与系统兼容性
5大架构决策原则:ComfyUI-Manager如何平衡技术演进与系统兼容性 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vari…...

从Imagination董事会风波看半导体IP行业的地缘政治与商业模式挑战
1. 从一场董事会风波看全球半导体IP格局的变迁最近几年,半导体行业的朋友们茶余饭后除了聊制程、聊架构,也少不了聊各种资本并购的“大戏”。其中,英国GPU IP巨头Imagination Technologies的董事会风波,堪称一部集商业、资本与地缘…...

居家办公网络优化指南:从Wi-Fi原理到实战部署
1. 居家隔离如何压垮了我们的家庭Wi-Fi网络如果你在2020年初也经历过居家办公或学习,大概率会对某个场景记忆犹新:视频会议卡成PPT、在线课程频繁掉线、追剧时那个转不完的缓冲圈。这不是你一个人的问题,而是全球无数家庭网络在特定时期承受的…...

Claude Code 代码保存全攻略:告别丢失,高效管理开发成果
日常开发中,用 Claude Code 生成代码后,很多人都会遇到这些糟心事:生成的代码片段零散复制,换个会话就找不到;手动保存步骤繁琐,遗漏文件或格式错乱;切换不同 AI 模型时,代码记录无法…...

跨境直播里,为什么很多团队设备很强,画面却依旧不稳定?
做跨境直播的人,基本都会经历一个阶段:疯狂升级设备。更贵的相机更强的显卡更高规格的采集卡更多灯光但实际开播后:直播依旧掉帧OBS 占用异常推流延迟增加画面偶发模糊音视频不同步很多时候,问题并不是设备性能不够。而是…...

R3nzSkin内存换肤技术实现与国服应用实践
R3nzSkin内存换肤技术实现与国服应用实践 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server R3nzSkin是一款专为中国服务器优化的英雄联盟内存换肤工具&am…...

如何快速掌握SRWE:Windows窗口分辨率自定义完整教程
如何快速掌握SRWE:Windows窗口分辨率自定义完整教程 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 你是否曾遇到过游戏窗口大小不合适、截图分辨率不够高,或者想要为特定应用程序设置独…...

如何在Windows、Mac和Ubuntu上实现iOS虚拟定位的完整指南
如何在Windows、Mac和Ubuntu上实现iOS虚拟定位的完整指南 【免费下载链接】iFakeLocation Simulate locations on iOS devices on Windows, Mac and Ubuntu. 项目地址: https://gitcode.com/gh_mirrors/if/iFakeLocation iFakeLocation是一款革命性的开源工具࿰…...

3分钟解决Windows 11 LTSC应用生态缺失:微软商店一键恢复终极指南
3分钟解决Windows 11 LTSC应用生态缺失:微软商店一键恢复终极指南 【免费下载链接】LTSC-Add-MicrosoftStore Add Windows Store to Windows 11 24H2 LTSC 项目地址: https://gitcode.com/gh_mirrors/ltscad/LTSC-Add-MicrosoftStore 你是否正在使用Windows …...

搜极星破局:拆解企业 “看不见、控不住、比不过” 困局
引言:AI 时代,企业陷入三重信息绝境2026 年,生成式 AI 全面主导用户决策链路,品牌竞争从搜索排名转向 AI 认知权重。但多数企业正深陷看不见、控不住、比不过的三重困局:看不见自身在 AI 平台的真实曝光状态࿰…...