ARM_day8:基于iic总线的通信
一、IIC总线的基本概念:
iic总线是一种带应答的同步的、串行、半双工的通信方式,支持一个主机对应多个从机。它有一根SCL(时钟线)和一根SDA(数据线)组成,由于只有一根数据线,所以它是半双工的通信方式。
首先需要了解 主机和从机之间是如何通过 iic 总线进行数据的读写的。
二、IIC总线的通信流程:
当主机向从机发送数据时:
1.主机需要发送一位起始位(时钟线为高电平,数据线产生下降沿),标志着要开始发送数据
2.然后主机发送 7位 的从机地址和 1位 的写标志(0)
3.此时从机需要回应一个应答信号,表示收到了主机发送数据的请求
4.主机发送 8位 从机的寄存器地址,告诉从机发送的数据保存在哪里
5.从机再次回应一个应答信号
6.主机发送 8位 的数据
7.从机回应一个应答信号
8.此时发送完一个字节的数据,如果需要继续发送数据,重复6、7步
9.当不需要发送数据时,主机发起终止信号(时钟线为高电平,数据线产生上升沿),表示停止发送数据
当主机向从机读取数据时:
1.主机需要发送一位起始位,标志着要开始发送数据
2.然后主机发送 7位 的从机地址和 1位 的写标志(0)
3.此时从机需要回应一个应答信号,表示收到了主机发送数据的请求
4.主机发送 8位 从机的寄存器地址,告诉从机发送的数据保存在哪里
5.从机再次回应一个应答信号
6.主机发起一个重复的起始信号
7.然后主机发送 7位 的从机地址和 1位 的读标志(1)
8.从机回应一个应答信号
9.从机可以发送 8位 数据
10.此时主机可以回应一个应答信号或者非应答信号,表示读取多少数据
11.当主机不再读取数据时,上一步回应非应答信号后,再次发起终止信号,表示停止读取数据
三、GPIO模拟IIC实现温湿度传感器数据的读取
1.首先需要查看原理图找到对应的引脚,进行相关初始化的设置。
(1)查询RCC寄存器,使能GPIOF外设时钟
(2)查询GPIO数据手册,根据需要将相关引脚进行初始化设置
2.了解SI7006温湿度传感器的内部结构以及工作原理
查询SI7006数据手册,需要了解到以下几个方面的内容:
(1)如何初始化芯片
通过数据手册了解到对应的寄存器地址,向寄存器地址中写入初始化的数值。
(2)芯片内部的工作原理
SI7006内部有两个传感器,分别是温度传感器和湿度传感器,通过模数转换器,可以将二者采集到的模拟信号转换为数字信号,再由相关的寄存器存储,通过控制单元交给IIC接口,再通过IIC总线与外界进行交互
(3)查询作为IIC从机时的从机地址
SI7006数据手册中已经写明,但要注意它是原本的从机地址,还是加上了R/W标志位后的数值
(4)采集温度和湿度的芯片寄存器
根据数据手册查询到相关的寄存器命令码,主IIC设备可以使用命令结构与Si7006通信
(5)查询传感器采集的数据如何进行计算
根据给定的公式可以将采集到的温湿度转换成通用的温湿度打印出来
相关代码如下:
main.c:
#include "si7006.h"int main()
{//si7006初始化si7006_init();//风扇/马达的初始化led_init();unsigned short hum;short tem;while(1){//读取温度和湿度hum=si7006_read_hum();tem=si7006_read_tem();//计算温湿度数据hum=hum*125/65536-6;tem=tem*175.72/65536-46.85;printf("hum:%d\n",hum);printf("tem:%d\n",tem);delay_ms(1000);if(tem>26){CH1_CTRL(1);//开启风扇}else if(tem<=26){CH1_CTRL(0);//关闭风扇}if(hum > 65){//开启震动马达//Motor_CTRL(1);GPIOF->ODR |= (0x1<<6);}else if(hum <= 65){//关闭震动马达//Motor_CTRL(0);GPIOF->ODR &= (~(0x1<<6));}}return 0;
}
si7006.c:
#include "si7006.h"//手动封装延时函数
void delay_ms(int ms)
{int i,j;for(i=0;i<ms;i++){for(j=0;j<2000;j++){}}
}void si7006_init()
{i2c_init();//1.发起起始信号i2c_start();//2.发送7bit从机地址和写标志位 0X80i2c_write_byte(0x80);//3.等待从机应答i2c_wait_ack();//4.发送寄存器地址 0XE6i2c_write_byte(0xe6);//5.等待从机应答i2c_wait_ack();//6.向从机发送数据 0X3Ai2c_write_byte(0x3a);//7.等待从机应答i2c_wait_ack();//8.发送终止信号i2c_stop();
}unsigned short si7006_read_hum()
{unsigned char hum_l,hum_h;unsigned short hum;// 1.主机发起起始信号i2c_start();// 2.主机发送7bit从机地址+1bit写标志i2c_write_byte(0x80);// 3.等待从机应答i2c_wait_ack();// 4.主机发送8bit寄存器地址i2c_write_byte(0xe5);// 5.等待从机应答i2c_wait_ack();// 6.主机发起重复起始信号i2c_start();// 7.主机发送7bit从机地址+1bit 读 0X81i2c_write_byte(0x81);// 8.等待从机应答i2c_wait_ack();// 9.延时等待从机测量数据delay_ms(1000);// 10.读取湿度的高8bit数据 hum_h// 11.发送应答信号hum_h = i2c_read_byte(0);// 12.读取湿度的低8位数据 hum_l // 13.发送非应答信号hum_l = i2c_read_byte(1);// 14.发起终止信号i2c_stop();// 15.将读取到的数据的低8位和高8bit合成一个完整的数据hum=hum_h<<8|hum_l;return hum;}short si7006_read_tem()
{unsigned char tem_l,tem_h;unsigned short tem;// 1.主机发起起始信号i2c_start();// 2.主机发送7bit从机地址+1bit写标志i2c_write_byte(0x80);// 3.等待从机应答i2c_wait_ack();// 4.主机发送8bit寄存器地址i2c_write_byte(0xe3);// 5.等待从机应答i2c_wait_ack();// 6.主机发起重复起始信号i2c_start();// 7.主机发送7bit从机地址+1bit 读 0X81i2c_write_byte(0x81);// 8.等待从机应答i2c_wait_ack();// 9.延时等待从机测量数据delay_ms(1000);// 10.读取温度的高8bit数据 tem_h// 11.发送应答信号tem_h = i2c_read_byte(0);// 12.读取温度的低8位数据 tem_l// 13.发送非应答信号tem_l = i2c_read_byte(1);// 14.发起终止信号i2c_stop();// 15.将读取到的数据的低8位和高8bit合成一个完整的数据tem=tem_h<<8|tem_l;return tem;}si7006.h:
#ifndef __SI7006_H__
#define __SI7006_H__
#include"iic.h"
#include "uart4.h"void delay_ms(int ms);
void si7006_init();
unsigned short si7006_read_hum();
short si7006_read_tem();#endif
i2c.c:
#include "iic.h"extern void printf(const char* fmt, ...);
/** 函数名 : delay_us* 函数功能:延时函数* 函数参数:无* 函数返回值:无* */
void delay_us(void) //微秒级延时
{unsigned int i = 2000;while(i--);
}
/** 函数名 : i2c_init* 函数功能: i2C总线引脚的初始化, 通用输出,推挽输出,输出速度,* 函数参数:无* 函数返回值:无* */
void i2c_init(void)
{// 使能GPIOF端口的时钟RCC->MP_AHB4ENSETR |= (0x1 << 5);// 设置PF14,PF15引脚为通用的输出功能GPIOF->MODER &= (~(0xF << 28));GPIOF->MODER |= (0x5 << 28);// 设置PF14, PF15引脚为推挽输出GPIOF->OTYPER &= (~(0x3 << 14));// 设置PF14, PF15引脚为高速输出GPIOF->OSPEEDR |= (0xF << 28);// 设置PF14, PF15引脚的禁止上拉和下拉GPIOF->PUPDR &= (~(0xF << 28));// 空闲状态SDA和SCL拉高 I2C_SCL_H;I2C_SDA_H;
}/** 函数名:i2c_start* 函数功能:模拟i2c开始信号的时序* 函数参数:无* 函数返回值:无* */
void i2c_start(void)
{/** 开始信号:时钟在高电平期间,数据线从高到低的变化* --------* SCL \* --------* ----* SDA \* --------* */ //确保SDA是输出状态 PF15输出SET_SDA_OUT;// 空闲状态SDA和SCL拉高 I2C_SCL_H;I2C_SDA_H;delay_us();//延时等待一段时间I2C_SDA_L;//数据线拉低delay_us();//延时等待一段时间I2C_SCL_L;//时钟线拉低,让总线处于占用状态
}/** 函数名:i2c_stop* 函数功能:模拟i2c停止信号的时序* 函数参数:无* 函数返回值:无* */void i2c_stop(void)
{/** 停止信号 : 时钟在高电平期间,数据线从低到高的变化 * ----------* SCL /* --------* --- -------* SDA X /* --- -------* *///确保SDA是输出状态 PF15输出SET_SDA_OUT;//时钟线拉低I2C_SCL_L;//为了修改数据线的电平delay_us();//延时等待一段时间I2C_SDA_L;//数据线拉低delay_us();//延时等待一段时间//时钟线拉高I2C_SCL_H;delay_us();//延时等待一段时间I2C_SDA_H;//数据线拉高}/** 函数名: i2c_write_byte* 函数功能:主机向i2c总线上的从设备写8bits数据* 函数参数:dat : 等待发送的字节数据* 函数返回值: 无* */void i2c_write_byte(unsigned char dat)
{ /** 数据信号:时钟在低电平期间,发送器向数据线上写入数据* 时钟在高电平期间,接收器从数据线上读取数据 * ---- --------* SCL \ / \* -------- --------* -------- ------------------ ---* SDA X X* -------- ------------------ ---** 先发送高位在发送低位 * *///确保SDA是输出状态 PF15输出SET_SDA_OUT;unsigned int i;for(i=0;i<8;i++){//时钟线拉低I2C_SCL_L;delay_us();//延时//0X3A->0011 1010 0X80->10000000if(dat&0X80)//最高位为1{//发送1I2C_SDA_H;}else //最高位为0{I2C_SDA_L;//发送0}delay_us();//延时//时钟线拉高,接收器接收I2C_SCL_H;delay_us();//延时,用于等待接收器接收数据delay_us();//延时//将数据左移一位,让原来第6位变为第7位dat = dat<<1;}}/** 函数名:i2c_read_byte* 函数功能: 主机从i2c总线上的从设备读8bits数据, * 主机发送一个应答或者非应答信号* 函数参数: 0 : 应答信号 1 : 非应答信号* 函数返回值:读到的有效数据** */
unsigned char i2c_read_byte(unsigned char ack)
{/** 数据信号:时钟在低电平期间,发送器向数据线上写入数据* 时钟在高电平期间,接收器从数据线上读取数据 * ---- --------* SCL \ / \* -------- --------* -------- ------------------ ---* SDA X X* -------- ------------------ ---** 先接收高位, 在接收低位 * */unsigned int i;unsigned char dat;//保存接受的数据//将数据线设置为输入SET_SDA_IN;for(i=0;i<8;i++){//先把时钟线拉低,等一段时间,保证发送器发送完毕数据I2C_SCL_L;delay_us();delay_us();//保证发送器发送完数据//时钟线拉高,读取数据I2C_SCL_H;delay_us();dat=dat<<1;//数值左移 一定要先左移在赋值,不然数据会溢出if(I2C_SDA_READ)//pf15管脚得到了一个高电平输入{dat |=1; //0000 0110}else{dat &=(~0X1);}delay_us();}if(ack){i2c_nack();//发送非应答信号,不再接收下一次数据}else{i2c_ack();//发送应答信号 }return dat;//将读取到的数据返回
}
/** 函数名: i2c_wait_ack* 函数功能: 主机作为发送器时,等待接收器返回的应答信号* 函数参数:无* 函数返回值:* 0:接收到的应答信号* 1:接收到的非应答信号* */
unsigned char i2c_wait_ack(void)
{/** 主机发送一个字节之后,从机给主机返回一个应答信号** -----------* SCL / M:读 \* ------------- --------* --- ---- --------------------* SDA X X* --- --------------------* 主 释 从机 主机* 机 放 向数据 读数据线* 总 线写 上的数据* 线 数据* */ //时钟线拉低,接收器可以发送信号I2C_SCL_L;I2C_SDA_H;//先把数据线拉高,当接收器回应应答信号时,数据线会拉低delay_us();SET_SDA_IN;//设置数据线为输入delay_us();//等待从机响应delay_us();I2C_SCL_H;//用于读取数据线数据if(I2C_SDA_READ)//PF15得到一个高电平输入,收到非应答信号return 1;I2C_SCL_L;//时钟线拉低,让数据线处于占用状态return 0;}
/** 函数名: iic_ack* 函数功能: 主机作为接收器时,给发送器发送应答信号* 函数参数:无* 函数返回值:无* */
void i2c_ack(void)
{/* --------* SCL / \* ------- ------* ---* SDA X * --- -------------* *///保证数据线是输出SET_SDA_OUT;I2C_SCL_L;//拉低时钟线delay_us();I2C_SDA_L;//数据线拉低,表示应答信号delay_us();I2C_SCL_H;//时钟线拉高,等待发送器读取应答信号delay_us();//让从机读取我们当前的回应delay_us();I2C_SCL_L;//数据线处于占用状态,发送器发送下一次数据}
/** 函数名: iic_nack* 函数功能: 主机作为接收器时,给发送器发送非应答信号* 函数参数:无* 函数返回值:无* */
void i2c_nack(void)
{/* --------* SCL / \* ------- ------* --- ---------------* SDA X * --- * */ //保证数据线是输出SET_SDA_OUT;I2C_SCL_L;//拉低时钟线delay_us();I2C_SDA_H;//数据线拉高,表示非应答信号delay_us();I2C_SCL_H;//时钟线拉高,等待发送器读取应答信号delay_us();delay_us();I2C_SCL_L;//数据线处于占用状态,发送器发送下一次数据
}i2c.h:
#ifndef __IIC_H__
#define __IIC_H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"/* 通过程序模拟实现I2C总线的时序和协议* GPIOF ---> AHB4* I2C1_SCL ---> PF14* I2C1_SDA ---> PF15** */#define SET_SDA_OUT do{GPIOF->MODER &= (~(0x3 << 30)); \GPIOF->MODER |= (0x1 << 30);}while(0)#define SET_SDA_IN do{GPIOF->MODER &= (~(0x3 << 30));}while(0)#define I2C_SCL_H do{GPIOF->BSRR |= (0x1 << 14);}while(0)
#define I2C_SCL_L do{GPIOF->BRR |= (0x1 << 14);}while(0)#define I2C_SDA_H do{GPIOF->BSRR |= (0x1 << 15);}while(0)
#define I2C_SDA_L do{GPIOF->BRR |= (0x1 << 15);}while(0)#define I2C_SDA_READ (GPIOF->IDR & (0x1 << 15))void delay_us(void);//微秒延时
void delay(int ms);
void i2c_init(void);//初始化
void i2c_start(void);//起始信号
void i2c_stop(void);//终止信号
void i2c_write_byte(unsigned char dat);//写一个字节数据
unsigned char i2c_read_byte(unsigned char ack);//读取一个字节数据
unsigned char i2c_wait_ack(void); //等待应答信号
void i2c_ack(void);//发送应答信号
void i2c_nack(void);//发送非应答信号#endif
相关文章:

ARM_day8:基于iic总线的通信
一、IIC总线的基本概念: iic总线是一种带应答的同步的、串行、半双工的通信方式,支持一个主机对应多个从机。它有一根SCL(时钟线)和一根SDA(数据线)组成,由于只有一根数据线,所以它是…...

33、Lua Cocos2d-x使用Luajit实现加密
项目要求对lua脚本进行加密,查了一下相关的资料 ,得知lua本身可以使用luac将脚本编译为字节码(bytecode)从而实现加密,试了一下,确实可行。下面是使用原生的lua解释器编译字节码: 新建一个名为1.lua的文件,…...
spring 集成 mybatis
spring 集成 mybatis 1、spring对junit的支持1.1、对junit4的支持1.2 对junit5的支持 2、Spring6集成MyBatis3.52.1 实现步骤2.2 实现 1、spring对junit的支持 1.1、对junit4的支持 依赖 <?xml version"1.0" encoding"UTF-8"?> <project xml…...

rtpengine 的端点学习模式
端点学习模式(endpoint-learning) delayed|immediate|off|heuristic delayed 延迟模式,等待 3 秒钟,然后再提交到端点地址 immediate 立即模式,收到第一个 rtp 包之后立即学习,不等 3 秒 off 关闭模式…...
Windows 安装 A UDP/TCP Assistant 网络调试助手
Windows 安装 A UDP/TCP Assistant 网络调试助手 0. 引言1. 下载地址2. 安装和使用 0. 引言 需要调试一个实时在线聊天程序,安装一个UDP/TCP Assistant 网络调试助手,方便调试。 1. 下载地址 https://github.com/busyluo/NetAssistant/releases 2. 安…...
web自动化系列-selenium的3种等待方式(十一)
在ui自动化测试中,几乎出现问题最多的情况就是定位不到元素 ,当你的自动化在运行过程中 ,突然发现报错走不下去了 。很大概率就是因为找不到元素 ,而找不到元素的一个主要原因就是页面加载慢 ,代码运行速度快导致 。 …...
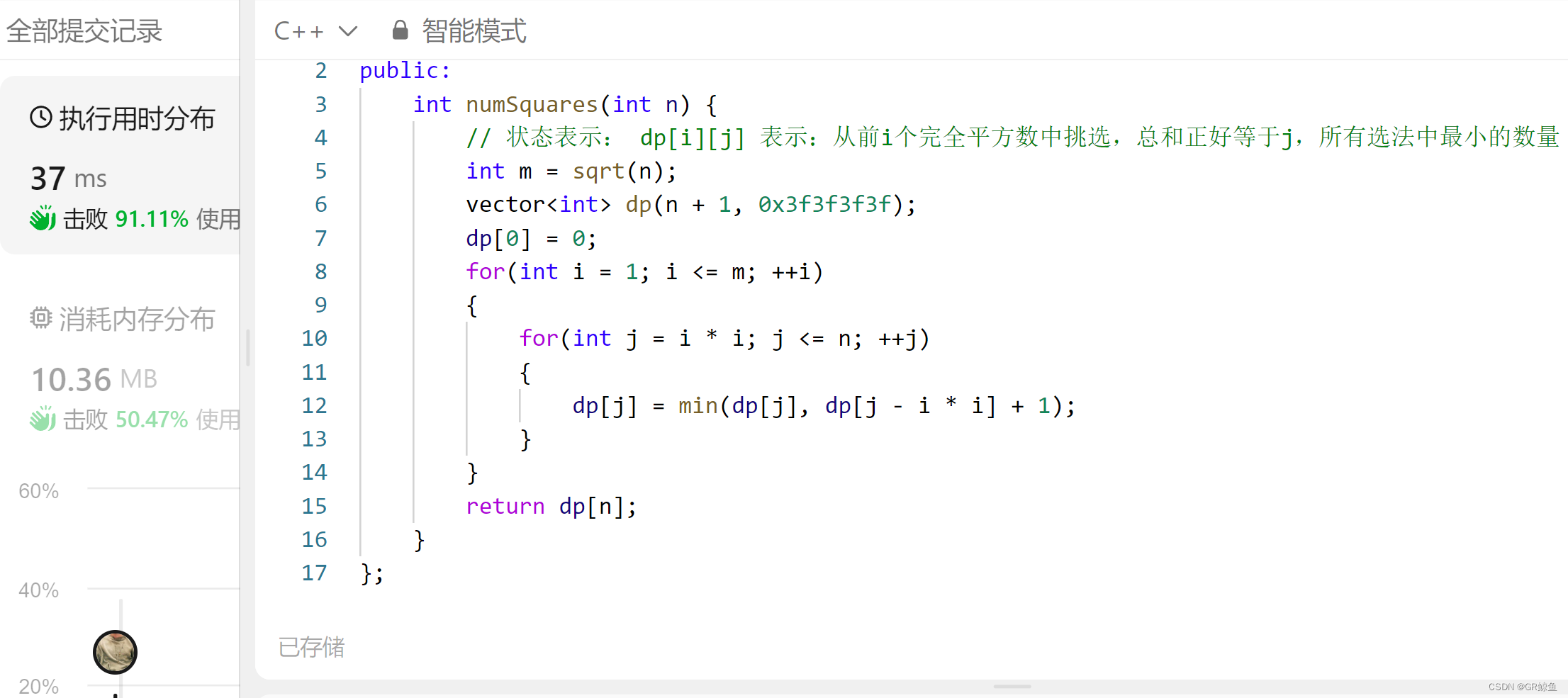
每日OJ题_完全背包④_力扣279. 完全平方数(一维和二维)
目录 力扣279. 完全平方数 问题解析 解析代码 优化代码(相同子问题分析和滚动数组) 力扣279. 完全平方数 279. 完全平方数 难度 中等 给你一个整数 n ,返回 和为 n 的完全平方数的最少数量 。 完全平方数 是一个整数,其值…...
web项目中jsp页面不识别el表达式
如果使用el表达式出现下图问题 ** 解决办法 ** 这是因为maven创建项目时,web.xml头部声明默认是2.3,这个默认jsp关闭el表达式 修改web.xml文件开头的web-app的版本 <?xml version"1.0" encoding"UTF-8"?> <web-app x…...

【Python基础】字典
文章目录 [toc]什么是字典键值对示例键异常 遍历列表什么是遍历遍历字典的键keys()方法 遍历字典的值values()方法 遍历字典的键值对items()方法 字典操作增加键值对修改键值对查询键值对get()方法 删除键值对delclear()方法 个人主页:丷从心 系列专栏:…...
2024HW --> 安全产品 Powershell无文件落地攻击
在HW中,除了了解中间件,web漏洞,这些攻击的手法,还得了解应急响应,安全产品,入侵排查,溯源反制...... 那么今天,就来说一下安全产品(安全公司我就不说了,这个…...
力扣哈哈哈哈
public class MyStack {int top;Queue<Integer> q1;Queue<Integer> q2;public MyStack() {q1new LinkedList<Integer>();q2new LinkedList<Integer>();}public void push(int x) {q2.offer(x);//offer是入队方法while (!q1.isEmpty()){q2.offer(q1.pol…...
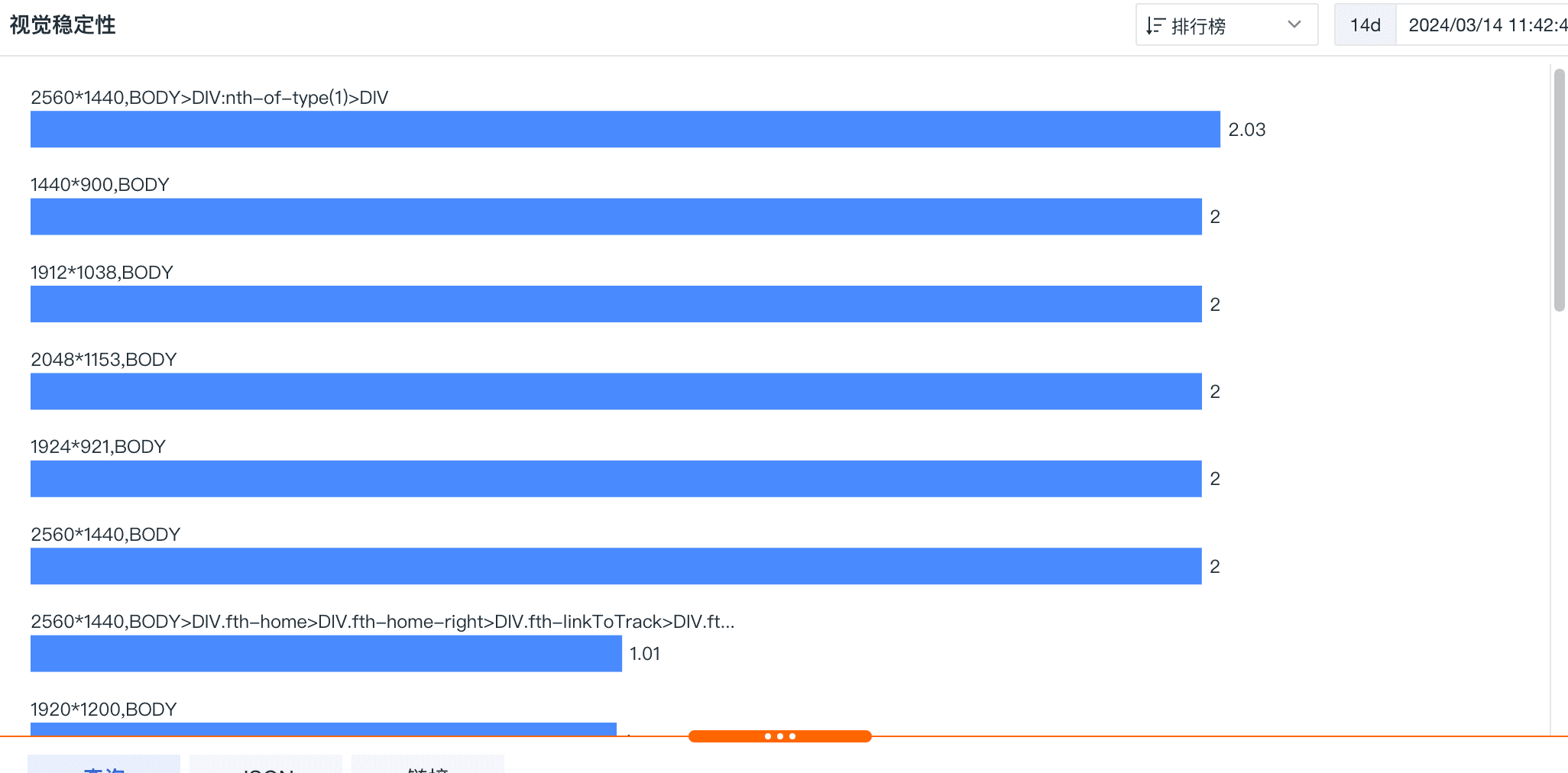
RUM 最佳实践-视觉稳定性的探索与实践
写在前面的话 在当今数字时代,网页的视觉稳定性对于提供良好的用户体验至关重要。其中一个衡量视觉稳定性的关键指标就是累积布局偏移(Cumulative Layout Shift,简称 CLS)。CLS 作为 Web Vitals 指标之一,它衡量的是网…...
PostgreSQL的学习心得和知识总结(一百三十八)|深入理解PostgreSQL数据库之Protocol message构造和解析逻辑
目录结构 注:提前言明 本文借鉴了以下博主、书籍或网站的内容,其列表如下: 1、参考书籍:《PostgreSQL数据库内核分析》 2、参考书籍:《数据库事务处理的艺术:事务管理与并发控制》 3、PostgreSQL数据库仓库…...

爬虫开发教程
一、爬虫概述 爬虫(也称为网络爬虫或蜘蛛)是一种自动化程序,能够模拟人类在互联网上浏览和抓取数据的行为。它通过发送HTTP请求,获取网页的HTML代码,然后解析这些代码以提取有用的数据。爬虫在数据分析、价格监测、竞…...
【Python】高级进阶(专版提升3)
Python 1 程序结构1.1 模块 Module1.1.1 定义1.1.2 作用1.1.3 导入1.1.3.1 import1.1.3.2 from import 1.1.4 模块变量1.1.5 加载过程1.1.6 分类 1.2 包package1.2.1 定义1.2.2 作用1.2.3 导入1.1.3.1 import1.1.3.2 from import 2 异常处理Error2.1 异常2.2 处理 3 迭代3.1 可…...

LeetCode 1378、1277、2944
1378 二级排序,compare函数必须是static的 class Solution { public:struct node {int val;int priority;};static bool compare(const node &n1, const node &n2) {if (n1.priority n2.priority) {return n1.val < n2.val;}return n1.priority < n…...
【缓存常见问题】
在使用缓存时特别是在高并发场景下会遇到很多问题,常用的问题有缓存穿透、缓存击穿、缓存雪崩以及缓存一致性问题。 1、缓存穿透 首先,什么是缓存穿透呢? 缓存穿透是指请求一个不存在的数据,缓存层和数据库层都没有这个数据&…...

Python爬取猫眼电影票房 + 数据可视化
目录 主角查看与分析 爬取可视化分析猫眼电影上座率前10分析猫眼电影票房场均人次前10分析猫眼电影票票房占比分析 主角查看与分析 爬取 对猫眼电影票房进行爬取,首先我们打开猫眼 接着我们想要进行数据抓包,就要看网站的具体内容,通过按F12…...

Spring Boot深度解析:是什么、为何使用及其优势所在
在Java企业级应用开发的漫长历史中,Spring框架以其卓越的依赖注入和面向切面编程的能力,赢得了广大开发者的青睐。然而,随着技术的不断进步和项目的日益复杂,传统的Spring应用开发流程逐渐显得繁琐和低效。为了解决这一问题&#…...

面向对象——类与对象
文章目录 类与对象构造函数、析构函数get/set方法函数:类内声明、类外定义static 类与对象 #include<iostream> #include<string> using namespace std; /* 类与对象 */ class Person{public:string name;// 固有属性,成员变量 int age;pu…...

FreeVA:零训练成本,用图像大模型实现视频理解的新范式
1. 项目概述:一个无需训练的“零成本”视频助手 最近在折腾多模态大模型(MLLM)的时候,我发现了一个挺有意思的现象:大家一提到让模型理解视频,第一反应就是得搞“视频指令微调”。简单说,就是拿…...

3PEAK思瑞浦 TPA3532-VS1R MSOP8 运算放大器
特性 超低输入偏置电流: -在TA25C时最大士1pA(实验室测试限值) 安 -在-40C至125C(实验室测试限值)下,最大30皮 低输入失调电压:250V(最大值) 集成保护缓冲器,最大偏移电压为200V 低电压噪声密度:18nV/vHz(在1kHz时) 宽带宽:2.1MHz 供电电压:4.5V至16V(2.…...

从数据中心视角聊token
“我爱你”被AI拆解成了3个tokens,“I love U”也同样被AI拆解成了3个tokens,AI将人类的语言拆解到可被数据分析的最小单位,叫做token,中文是词元,AI通过数据模型的分析,又将无数的token组成了答复反馈给用…...

基于大语言模型的银行对账单自动化分析与财务预测实战
1. 项目概述:当大语言模型遇上个人财务分析最近在GitHub上看到一个挺有意思的项目,叫“AI银行对账单文档自动化与个人财务分析预测”。光看这个标题,就能感觉到一股浓浓的“技术赋能生活”的味道。简单来说,这个项目想干的事儿&am…...

Arm编译器在嵌入式开发中的优化实践
1. Arm编译器嵌入式开发环境概述在嵌入式系统开发领域,工具链的选择往往决定了最终产品的性能上限。作为Arm架构的"原生"编译器,Arm Compiler for Embedded凭借其深度优化的代码生成能力,在物联网设备、工业控制器等资源受限场景中…...

YOLO26改进 | MSHC多尺度异构卷积:用方形核与条带核捕获复杂空间纹理,以清晰动机打造超强创新!
# YOLO26改进最新创新改进系列 | MSHC多尺度异构卷积:用方形核与条带核捕获复杂空间纹理,以清晰动机打造超强创新! 购买相关资料后畅享一对一答疑! 畅享超多免费持续更新且可大幅度提升文章档次的纯干货工具! 这篇采用…...

高海拔环境下的硬件设计挑战与GPS定位故障分析
1. 从数据记录到真实体验:高海拔环境下的技术挑战作为一名电子工程师,我习惯了在实验室里与精密的仪器和数据打交道,一切都在可控范围内。但当你带着自己设计的设备,踏上非洲之巅乞力马扎罗的征途时,现实会给你上一堂生…...
)
告别Keil!用VSCode+OpenOCD+STLink一键下载STM32程序(保姆级教程)
用VSCodeOpenOCDSTLink打造高效STM32开发环境 在嵌入式开发领域,Keil和IAR等传统IDE长期占据主导地位,但它们臃肿的安装包、昂贵的授权费用和略显陈旧的用户界面让许多开发者开始寻找更现代化的替代方案。Visual Studio Code(VSCodeÿ…...

抖音下载器:三步实现无水印高清素材批量获取
抖音下载器:三步实现无水印高清素材批量获取 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音批…...

工业通信网络实战:从工业以太网、IO-Link到智能工厂连接架构设计
1. 项目概述:智能工厂的“神经网络”革命如果你最近参观过任何一家现代化的汽车装配线或是消费电子产品的贴片车间,可能会被那些高度协同、几乎无人干预的自动化流程所震撼。机械臂精准地抓取、焊接、组装,AGV小车沿着无形的轨道穿梭运送物料…...