rbd块设备数据IO流程(client端)
一、rbd内核驱动写入流程
1)初始化
首先是rbd驱动的初始化工作:包括验证libceph的兼容性,分配内存,在sysfs中创建块设备控制文件、创建工作队列rbd_wq并调用INIT_WORK初始化它
module_init(rbd_init);
static int __init rbd_init(void)
{
if (!libceph_compatible(NULL)) { //兼容性
rbd_warn(NULL, "libceph incompatibility (quitting)");
return -EINVAL;
}
rbd_wq = alloc_workqueue(RBD_DRV_NAME, WQ_MEM_RECLAIM, 0); //创建工作队列
if (!rbd_wq)
{rc = -ENOMEM;goto err_out_slab;
}
rc = rbd_slab_init(); //初始化内存分配器
if (rc)
return rc;
.......
rc = rbd_sysfs_init(); //创建/sys/bus/rbd/
if (rc)
goto err_out_blkdev;
...}static int rbd_init_request(void *data, struct request *rq,unsigned int hctx_idx, unsigned int request_idx,unsigned int numa_node)
{struct work_struct *work = blk_mq_rq_to_pdu(rq);INIT_WORK(work, rbd_queue_workfn); //初始化一个work,work通过rbd_queue_workfn进行处理return 0;
}2)块设备创建、工作队列中启动work
添加块设备,首先创建一个rbd client用来通信,然后选择一个pool存储池去创建rbd设备,创建完成后调用rbd_dev_device_setup初始化rbd设备,在初始化块设备的时候会启动工作队列rbd_wq,并将通用块设备层的请求转化为一个work添加到rbd_wq工作队列中,然后由cpu调度执行工作队列rbd_wq中的work,work对应的处理函数为rbd_queue_workfn,该work用于处理通用块设备层的IO请求。
启动work的调用关系: rbd_dev_device_setup → rbd_init_disk → rbd_mq_ops → rbd_init_request → rbd_queue_workfn处理函数
static BUS_ATTR(add, S_IWUSR, NULL, rbd_add);
static BUS_ATTR(remove, S_IWUSR, NULL, rbd_remove);
static BUS_ATTR(add_single_major, S_IWUSR, NULL, rbd_add_single_major);
static BUS_ATTR(remove_single_major, S_IWUSR, NULL, rbd_remove_single_major);static int rbd_queue_rq(struct blk_mq_hw_ctx *hctx,const struct blk_mq_queue_data *bd)
{struct request *rq = bd->rq;struct work_struct *work = blk_mq_rq_to_pdu(rq); //通用块设备层请求转为workqueue_work(rbd_wq, work); //将work加入到工作队列,工作队列中的work由cpu调度处理return BLK_MQ_RQ_QUEUE_OK;
}static ssize_t rbd_add(struct bus_type *bus,const char *buf,size_t count)
{if (single_major)return -EINVAL;return do_rbd_add(bus, buf, count);
}static ssize_t do_rbd_add(struct bus_type *bus,const char *buf,size_t count)
{.....rbdc = rbd_get_client(ceph_opts); //获取或创建rbd_clientif (IS_ERR(rbdc)) {rc = PTR_ERR(rbdc);goto err_out_args;}/* pick the pool */rc = rbd_add_get_pool_id(rbdc, spec->pool_name); //选择存储池if (rc < 0) {if (rc == -ENOENT)pr_info("pool %s does not exist\n", spec->pool_name);goto err_out_client;}spec->pool_id = (u64)rc;rbd_dev = rbd_dev_create(rbdc, spec, rbd_opts); //创建rbd设备down_write(&rbd_dev->header_rwsem);
......rc = rbd_dev_image_probe(rbd_dev, 0); //探针更多的是检查rbd image是否被mapif (rc < 0) {up_write(&rbd_dev->header_rwsem);goto err_out_rbd_dev;}
......rc = rbd_dev_device_setup(rbd_dev); //包括obj->pg映射等static int rbd_dev_device_setup(struct rbd_device *rbd_dev)
{int ret;
....../* Set up the blkdev mapping. */ret = rbd_init_disk(rbd_dev); ......
}static int rbd_init_disk(struct rbd_device *rbd_dev)
{struct gendisk *disk;struct request_queue *q;u64 segment_size;int err;
.....memset(&rbd_dev->tag_set, 0, sizeof(rbd_dev->tag_set));rbd_dev->tag_set.ops = &rbd_mq_ops; //rbd_dev初始化rbd_dev->tag_set.queue_depth = rbd_dev->opts->queue_depth;rbd_dev->tag_set.numa_node = NUMA_NO_NODE;
.....
}static struct blk_mq_ops rbd_mq_ops = {.queue_rq = rbd_queue_rq,.init_request = rbd_init_request, //调用rbd_init_request
};static int rbd_init_request(void *data, struct request *rq,unsigned int hctx_idx, unsigned int request_idx,unsigned int numa_node)
{struct work_struct *work = blk_mq_rq_to_pdu(rq);INIT_WORK(work, rbd_queue_workfn); //通过work_struct启动线程return 0;
}3)work处理函数rbd_queue_workfn内流程分析
从上层取出通用块设备层请求后,转换为image对象,再从image对象批量转为object对象,再计算出object到pg,pg到osd的映射关系。
3.1 获取通用块设备层信息
在rbd_queue_workfn中,通过blk_mq_rq_from_pdu获取到通用块设备层IO请求rq、通过blk_rq_bytes(rq)获取到请求中需要写入的数据长度length(length表示的是客户端需要写到磁盘总的数据长度),通过blk_rq_pos(rq)获取块设备写入偏移量offset。
static void rbd_queue_workfn(struct work_struct *work)
{struct request *rq = blk_mq_rq_from_pdu(work); //通用块设备层请求struct rbd_device *rbd_dev = rq->q->queuedata;struct rbd_img_request *img_request;struct ceph_snap_context *snapc = NULL;u64 offset = (u64)blk_rq_pos(rq) << SECTOR_SHIFT; //块设备的偏移量u64 length = blk_rq_bytes(rq); //enum obj_operation_type op_type;
.....
}3.2 通用块设备层信息转换image请求,image请求批量转换为object
在rbd_queue_workfn中从通用块设备层请求中获取到块设备偏移offset和长度length后,再使用这些指标来创建img_request并将img_request→offset进行填充中,然后调用rbd_img_request_fill函数,在该函数中,基于rados object的大小(4M)与rados对象在rbd中的segment排列,对请求进行拆分,最终将rbd_img_request拆分成多个rbd_obj_request对象,通过这样的过程实现从linux内核的通用块请求到ceph rados object的转换。
static void rbd_queue_workfn(struct work_struct *work)
{struct request *rq = blk_mq_rq_from_pdu(work);struct rbd_device *rbd_dev = rq->q->queuedata;struct rbd_img_request *img_request;u64 offset = (u64)blk_rq_pos(rq) << SECTOR_SHIFT; //块设备偏移u64 length = blk_rq_bytes(rq); //长度
......img_request = rbd_img_request_create(rbd_dev, offset, length, op_type, //创建img_requestsnapc); img_request->offset = offset; //填充img_request→offsetresult = rbd_img_request_fill(img_request, OBJ_REQUEST_BIO, //将rbd_img_request划分为一个个rbd_obj_requestrq->bio);
.....
}static int rbd_img_request_fill(struct rbd_img_request *img_request,enum obj_request_type type,void *data_desc)
{struct rbd_obj_request *obj_request = NULL;u64 img_offset;img_offset = img_request->offset; //块设备当前写入的偏移位置resid = img_request->length; //待写入的长度while (resid) {
......object_name = rbd_segment_name(rbd_dev, img_offset); //对象名length = rbd_segment_length(rbd_dev, img_offset, resid); //长度obj_request = rbd_obj_request_create(object_name, //创建obj_request对象offset, length, type);
......img_offset += length; //偏移增加lengthresid -= length;
......
}3.3 rbd块设备offset到rados object的映射
rbd块设备到rados对象的映射是根据rados对象的大小以及当前块设备的偏移量来决定的,并且rados对象的命名方式采用前缀rbd_data.$image_id.16位16进制的序号构成。
3.3.1 rados对象大小与命名方式
每个rbd块设备都定义了一个2为底的指数来表示每个rbd对象的大小,这个指数称为rbd的obj order。obj order默认值为22,因此每个rbd对象大小2^22Bytes,即每个rados对象大小为4MB。
相关文章:
)
rbd块设备数据IO流程(client端)
一、rbd内核驱动写入流程 1)初始化 首先是rbd驱动的初始化工作:包括验证libceph的兼容性,分配内存,在sysfs中创建块设备控制文件、创建工作队列rbd_wq并调用INIT_WORK初始化它 module_init(rbd_init); static int __init rbd_i…...

数据仓库、数据中台、大数据平台之间的关系
数据行业经常会出现数据仓库、数据中台、大数据平台等概念,容易产生疑问,它们中间是相等,还是包含的关系? 数据中台和数据仓库概念的关系 数据中台概念是包含数据仓库的,数据仓库是数据中台中的一部分,包含…...

python写页面自动截图
from selenium import webdriver def take_screenshot(url, file_path):driver webdriver.Chrome()driver.get(url)driver.save_screenshot(file_path)driver.quit() if __name__ __main__:take_screenshot(http://baidu.com, D:\桌面\wang.png)要安装selenium还要安装google…...

【Qt 学习笔记】Qt常用控件 | 布局管理器 | 空白项Spacer
博客主页:Duck Bro 博客主页系列专栏:Qt 专栏关注博主,后期持续更新系列文章如果有错误感谢请大家批评指出,及时修改感谢大家点赞👍收藏⭐评论✍ Qt常用控件 | 布局管理器 | 添加空白Spacer 文章编号:Qt 学…...

es问题汇总--待完善
1. 查询某个索引库中数据总量 方式一: CountRequest 鄙人喜欢这种方式 public long getTotalNum(String indexName) throws IOException {CountRequest countRequest new CountRequest(indexName);// 如果需要,你可以在这里添加查询条件// countReques…...

python 线性回归模型
教材链接-3.2. 线性回归的从零开始实现 c实现 该博客仅用于记录一下自己的代码,可与c实现作为对照 from d2l import torch as d2l import torch import random # nn是神经网络的缩写 from torch import nn from torch.utils import data# 加载训练数据 # 加载训…...
pcl::transformPointCloud()用法及注意事项
函数用法 #include <pcl/common/transforms.h> pcl::transformPointCloud(const pcl::PointCloud<PointT> &cloud_in, pcl::PointCloud<PointT> &cloud_out, const Eigen::Matrix4f &transform) 其中cloud_in, cloud_out的类型为pcl::PointClo…...
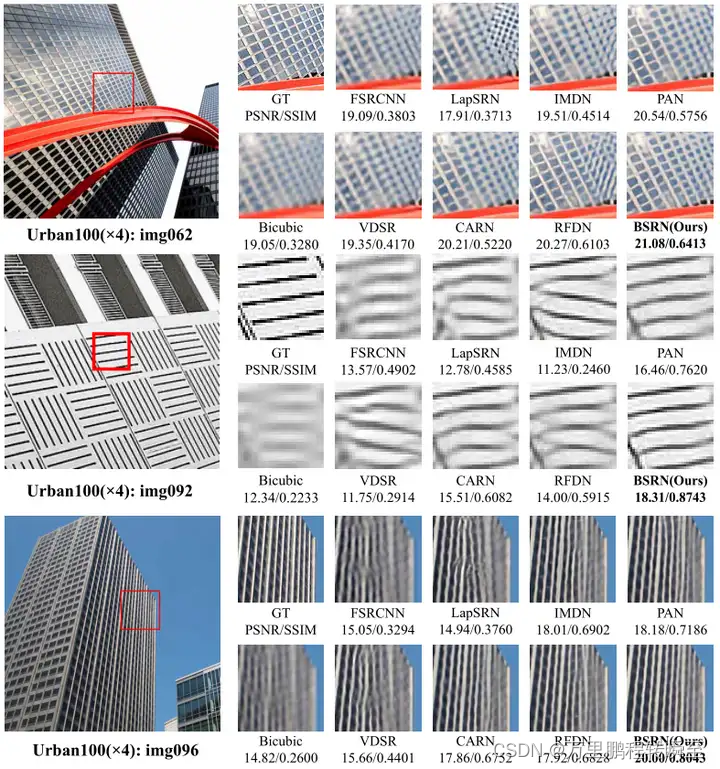
图像超分辨率重建相关概念、评价指标、数据集、模型
1、图像超分辨率概念 1.1 基本定义 超分辨率(Super-Resolution),简称超分(SR)。是指利用光学及其相关光学知识,根据已知图像信息恢复图像细节和其他数据信息的过程,简单来说就是增大图像的分辨…...

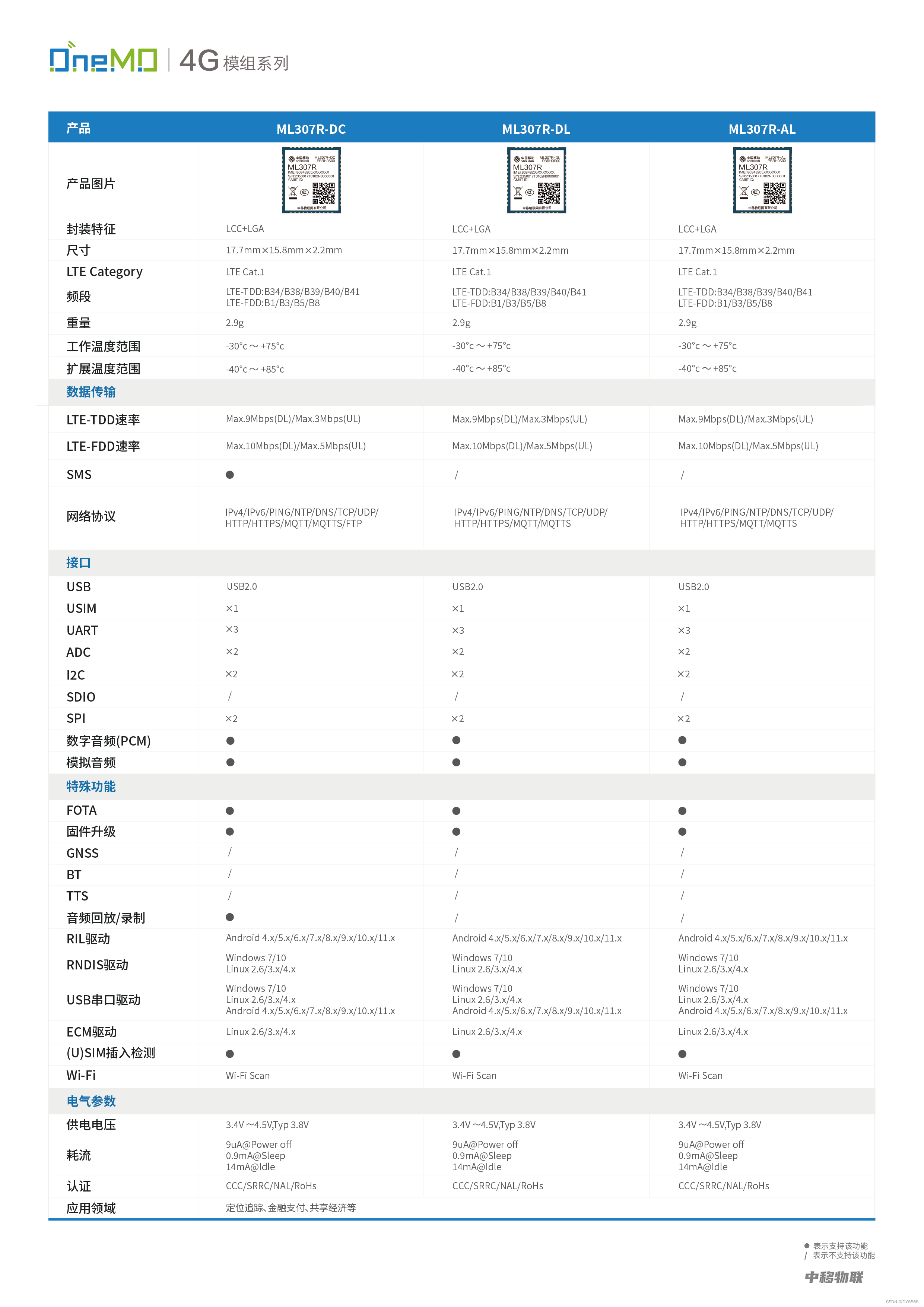
中移物联OneMO Cat.1模组推动联网POS规模应用
在第三方支付蓬勃发展和消费模式不断革新的时代背景下,新型联网POS终端以其智能化、便捷化的特点丰富人们生活便利度。在这一变革浪潮中,中移物联OneMO Cat.1模组ML307R凭借其卓越的性能和成本效益,成为推动联网POS规模应用的重要力量。 性能…...
二.常见算法--贪心算法
(1)单源点最短路径问题 问题描述: 给定一个图,任取其中一个节点为固定的起点,求从起点到任意节点的最短路径距离。 例如: 思路与关键点: 以下代码中涉及到宏INT_MAX,存在于<limits.h>中…...
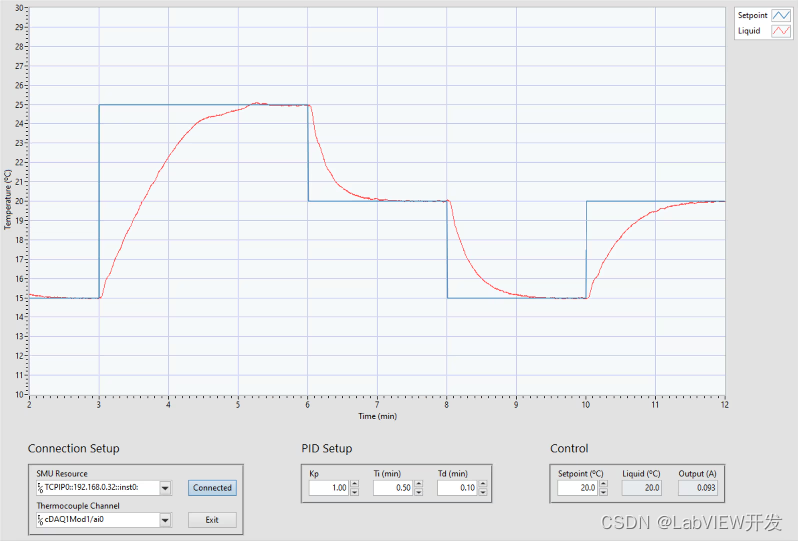
LabVIEW高温往复摩擦测试系统中PID控制
在LabVIEW开发高温往复摩擦测试系统中实现PID控制,需要注意以下几个方面: 1. 系统建模与参数确定 物理模型建立: 首先,需要了解被控对象的物理特性,包括热惯性、摩擦系数等。这些特性决定了系统的响应速度和稳定性。实验数据获取…...

配置yum源
以下是在 Linux 系统中配置新的 yum 源的一般步骤和命令示例(以 CentOS 系统为例): 备份原有 yum 源配置文件:mv /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.bak 创建新的 yum 源配置文件(…...
数据技术篇之数据同步)
深入理解数仓开发(二)数据技术篇之数据同步
1、数据同步 数据同步我们之前在数仓当中使用了多种工具,比如使用 Flume 将日志文件从服务器采集到 Kafka,再通过 Flume 将 Kafka 中的数据采集到 HDFS。使用 MaxWell 实时监听 MySQL 的 binlog 日志,并将采集到的变更日志(json 格…...
—— 类与对象(二))
C++语言学习(六)—— 类与对象(二)
目录 一、对象数组 二、对象指针 三、this 指针 四、类类型作为参数类型的三种形式 4.1 对象本身作为参数 4.2 对象指针作为参数 4.3 对象引用作为参数 五、静态成员 5.1 静态数据成员 5.2 静态成员函数 六、友元机制 6.1 友元函数 6.2 友元类 七、类的组合 八、…...

3d选择模型后不能旋转什么原因?怎么解决?---模大狮模型网
在3D建模和渲染的过程中,旋转模型是常见的操作。然而,有时在选择了模型后,却发现无法进行旋转,这可能会让许多用户感到困扰。本文将探讨3D选择模型后不能旋转的可能原因,并提供相应的解决方法。 一、3D选择模型后不能旋…...

从入门到精通:详解Linux环境基础开发工具的使用
前言 在这篇文章中,我将深入学习和理解Linux环境基础开发工具的使用。无论你是初学者还是有一定经验的开发者,相信这篇文章都会对你有所帮助。我们将详细讲解软件包管理器、编辑器、编译器、调试器、自动化构建工具以及版本控制工具的使用。 Linux软件…...
安装 node)
linux(centos 7)安装 node
linux(centos 7)安装 node 下载对应版本&安装解压配置环境变量使配置文件生效验证是否安装成功附加 目前node最新版本是 node-v22.0.0 官网下载地址:https://registry.npmmirror.com/binary.html?pathnode/latest-v22.x/node-v22.0.0-li…...

C++之第九课
课程列表 今天,我们要学习一种结构:循环结构。 循环的方法有3种。 今天先将第1种for学了: int a;//循环变量 int b; for(a1;a<10;a){//像if那样“打包”cout<<a<<" ";b; } 当然,也可以这样写&#…...

618精选编程书单推荐:优质知识提升你的代码力
前言 在这个快速发展的技术时代,不断学习和提升自己的编程技能是每位程序员的必修课。今天,我为大家精心挑选了一系列编程技术书籍,它们将是你技术成长道路上的宝贵财富。 文章目录 前言编程之路:为何阅读书籍是不可或缺的书籍的…...
)
空气动力学计算 · 趋势图谱(学生学习版)
<!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>空气动力学计算 趋势图谱(学生学习版…...

视频理解新范式:COOT模型实现对象-场景联合建模的视频描述生成
1. 项目概述:让视频自己“开口说话”的底层逻辑你有没有遇到过这样的场景:手头有一段3分钟的产品演示视频,需要快速生成一段精准的图文摘要发给客户;或者在做无障碍内容开发时,得为一段教学视频配上逐帧语义描述&#…...

C++面试考点 头文件与实现文件形式
为什么C标准头文件没有所谓的.h后缀? 在一个源文件中,函数模板的声明与定义分离是可以的,即使把函数模板的实现放在调用 之下也是ok的,与普通函数一致。//函数模板的声明 template <class T> T add(T t1, T t2);…...

LNK2001 无法解析的外部符号 “public: static struct QMetaObject const UIDPrintPage::staticMetaObject“
排查一早上的问题,不知道设置哪里出了这个问题,突然提示无法生成Qt的元对象moc_对应的文件,所以这里查找问题根源,语法错误还是路径设置等问题。最终定位还是文件属性设置有问题,估计是改了那些设置吧,最终…...

Unity WebGL底层原理与实战避坑指南
1. 这不是“把游戏搬上网页”那么简单:一场对Unity WebGL底层逻辑的硬核拆解 “疯狂特技赛车2”这个名字,对很多老玩家而言,是童年街机厅里手心冒汗、摇杆发烫的记忆。而当我在GitHub上第一次点开它被公开的Unity源码仓库,看到 B…...

DeepSeek多集群联邦治理难题破局:用GitOps+ArgoCD+自定义CRD实现跨AZ/AWS/GCP统一管控——现在不看,下季度升级将强制启用
更多请点击: https://kaifayun.com 第一章:DeepSeek云原生架构设计 DeepSeek云原生架构以Kubernetes为核心调度平台,深度融合服务网格(Istio)、可观测性栈(Prometheus Grafana Loki)与GitOps…...
)
告别OnlyOffice限制!用Alist+KkFileView搭建全能文件预览中心(支持CAD/PSD/ZIP)
突破文件预览瓶颈:AlistKkFileView全格式支持实战指南 你是否曾因AlistOnlyOffice无法预览CAD图纸而焦头烂额?或是面对团队发来的PSD设计稿只能干瞪眼?这套组合方案虽能解决基础办公文档需求,但遇到专业格式就束手无策。本文将带你…...
)
保姆级教程:用微信小程序测试号搞定getPhoneNumber功能(绕过企业认证限制)
微信小程序测试号实战:零成本解锁getPhoneNumber全流程指南 最近在帮朋友开发一个预约类小程序时,遇到了一个典型问题:需要获取用户手机号进行预约确认,但个人开发者账号无法直接调用getPhoneNumber接口。这让我想起了三年前第一次…...

基于ARM核心板的BMS分层硬件方案:从BMU到BAMS的选型与实现
1. 项目概述:为什么BMS是储能系统的“大脑”与“保镖”在电化学储能系统这个庞大的“能量银行”里,电池模组是负责存钱的“金库”,储能变流器(PCS)是负责存取款和货币兑换的“柜台”,而电池管理系统&#x…...

技术人被裁员时,除了N+1还有哪些权益可以争取?
一、 核心概念澄清:你的赔偿基准是 N、N1 还是 2N?在挖掘附加权益之前,我们必须像制定测试策略一样,先明确基准。很多测试同学对赔偿的理解存在“Bug”,必须优先修复。N:指经济补偿金,计算方式是…...