智能家居完结 -- 整体设计
系统框图

前情提要:
智能家居1 -- 实现语音模块-CSDN博客
智能家居2 -- 实现网络控制模块-CSDN博客
智能家居3 - 实现烟雾报警模块-CSDN博客
智能家居4 -- 添加接收消息的初步处理-CSDN博客
智能家居5 - 实现处理线程-CSDN博客
智能家居6 -- 配置 ini文件优化设备添加-CSDN博客
实现主要程序:
main.c
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <wiringPi.h>#include "control.h"
#include "mq_queue.h"
#include "voice_interface.h"
#include "socket_interface.h"
#include "smoke_interface.h"
#include "receive_interface.h"
#include "global.h"// msg_queue_createint main() {pthread_t thread_id;struct control *control_phead = NULL;struct control *pointer = NULL;ctrl_info_t *ctrl_info = NULL;ctrl_info = (ctrl_info_t *)malloc(sizeof(ctrl_info_t));ctrl_info->ctrl_phead = NULL;ctrl_info->mqd = -1;int node_num = 0; // 统计节点数if(-1 == wiringPiSetup())// 初始化 wiringPi 库{perror("wiringPi Init");return -1;}// 创建消息队列ctrl_info->mqd = msg_queue_create();if(-1 == ctrl_info->mqd)// 创建消息队列失败{printf("%s|%s|%d, mqd= %d\n",__FILE__,__func__,__LINE__,ctrl_info->mqd);return -1;}// 头插法插入 , so 头一直在变化ctrl_info->ctrl_phead = add_voice_to_ctrl_list(ctrl_info->ctrl_phead);ctrl_info->ctrl_phead = add_tcpsocket_to_ctrl_list(ctrl_info->ctrl_phead);ctrl_info->ctrl_phead = add_smoke_to_ctrl_list(ctrl_info->ctrl_phead);ctrl_info->ctrl_phead = add_receive_to_ctrl_list(ctrl_info->ctrl_phead);pointer = ctrl_info->ctrl_phead;while(NULL!=pointer) // 对所有控制结构体初始化,并且统计节点数{if(NULL != pointer->init){printf("%s|%s|%d control_name = %s\n",__FILE__,__func__,__LINE__,pointer->control_name);pointer->init();}pointer = pointer->next;node_num++; // 统计节点数}// 根据节点的总数 --> 创建对应数目的线程pthread_t *tid = (pthread_t *)malloc(sizeof(int) *node_num);pointer = ctrl_info->ctrl_phead;for(int i=0;i<node_num;++i)//遍历所有节点{if(NULL != pointer->get){printf("%s|%s|%d control_name = %s\n",__FILE__,__func__,__LINE__,pointer->control_name);pthread_create(&tid[i],NULL,(void *)pointer->get,(void *)ctrl_info); // 传入这个结构体参数,方便同时调用多组线程里面的API}pointer = pointer->next;}for(int i=0;i<node_num;++i){pthread_join(tid[i],NULL);}for(int i=0;i<node_num;++i){if(NULL != pointer->final)pointer->final(); // 接打开的使用接口关闭pointer = pointer->next;}msq_queue_final(ctrl_info->mqd);if(NULL != ctrl_info)free(ctrl_info); // 这个是malloc 堆区申请的内存 --> 需要手动的释放if(NULL != tid)free(tid);return 0;
}语言控制模块 - voice_interface.c
#if 0
struct control
{
char control_name[128]; //监听模块名称
int (*init)(void); //初始化函数
void (*final)(void);//结束释放函数
void *(*get)(void *arg);//监听函数,如语音监听
void *(*set)(void *arg); //设置函数,如语音播报
struct control *next;
};
#endif#include <pthread.h>
#include <stdio.h>
#include "voice_interface.h"
#include "mq_queue.h"
#include "uartTool.h"
#include "global.h"static int serial_fd = -1; // static 这个 变量只在当前文件有效static int voice_init(void )
{serial_fd = myserialOpen(SERIAL_DEV,BAUD); // 初始化并且打开串口printf("%s|%s|%d serial_fd = %d\n",__FILE__,__func__,__LINE__,serial_fd);return serial_fd;
}static void voice_final(void)
{if(-1 != serial_fd) // 打开串口成功{close(serial_fd); // 关闭我们打开的串口serial_fd = -1; // 复位}
}
// 接收语言指令
static void* voice_get(void *arg)// mqd 通过arg 传参获得
{int len = 0;mqd_t mqd = -1;ctrl_info_t * ctrl_info = NULL; if(NULL != arg)ctrl_info = (ctrl_info_t*)arg;unsigned char buffer[6] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00}; // 初始化 bufferif (-1 == serial_fd){//打开串口serial_fd = voice_init();// 尝试打开串口if (-1 == serial_fd){ //还是打开失败printf("%s | %s | %d:open serial failed\n", __FILE__, __func__, __LINE__); // 三个宏的含义: 文件名 - main.c,函数名 - pget_voice ,行号 - 138pthread_exit(0); } // 串口打开失败 -->退出}mqd = ctrl_info->mqd; if((mqd_t)-1 == mqd){pthread_exit(0); }pthread_detach(pthread_self());// 与父线程分离printf("%s thread start\n",__func__);while (1){len = serialGetstring(serial_fd, buffer); // 通过串口获得语言输入printf("%s|%s|%d, 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);printf("%s|%s|%d:len = %d\n",__FILE__,__func__,__LINE__,len);if (len > 0) // 判断是否 接到识别指令{if(buffer[0] == 0xAA && buffer[1] == 0x55 &&buffer[4]==0x55 && buffer[5]==0xAA){printf("%s|%s|%d, send: 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);send_msg(mqd,buffer,len); // 注意获取len长度不能使用strlen() --> 0x00 会识别为截止位-->只能读取到三个字节(但不是我们实际的截止位(0x55 0xAA ))}memset(buffer,0,sizeof(buffer)); // 复位buffer}}pthread_exit(0);}
// 语音播报static void* voice_set(void *arg)
{pthread_detach(pthread_self());// 与父线程分离unsigned char *buffer = (unsigned char*)arg;if (-1 == serial_fd){//打开串口serial_fd = voice_init();// 尝试打开串口if (-1 == serial_fd){ //还是打开失败printf("%s | %s | %d:open serial failed\n", __FILE__, __func__, __LINE__); // 三个宏的含义: 文件名 - main.c,函数名 - pget_voice ,行号 - 138pthread_exit(0); } // 串口打开失败 -->退出}if(NULL != buffer){ // 接收到数据serialSendstring(serial_fd,buffer,6); // 向串口发送接收到的数据// 语言模块识别到串口发送的数据后就,进行相应的语言输出 }pthread_exit(0);
}struct control voice_control ={.control_name = "voice",.init = voice_init,.final = voice_final,.get = voice_get,.set = voice_set,.next = NULL
};struct control *add_voice_to_ctrl_list(struct control *phead)
{//头插法实现 添加链表节点return add_interface_to_ctrl_list(phead,&voice_control);};网络控制模块 - socket_interface.c
#include <pthread.h>#include "socket_interface.h"
#include "control.h"
#include "socket.h"
#include "mq_queue.h"
#include "global.h"
#include <netinet/tcp.h> // 设置 tcp 心跳 的参数static int s_fd = -1;static int tcpsocket_init(void)
{s_fd = socket_init(IPADDR,IPPORT);//return s_fd;return -1;
}static void tcpsocket_final(void)
{close(s_fd);s_fd = -1;
}static void* tcpsocket_get(void *arg)
{int c_fd = -1;unsigned char buffer[BUF_SIZE];int ret = -1;struct sockaddr_in c_addr;mqd_t mqd = -1;ctrl_info_t * ctrl_info = NULL; int keepalive = 1; // 开启TCP_KEEPALIVE选项int keepidle = 10; // 设置探测时间间隔为10秒int keepinterval = 5; // 设置探测包发送间隔为5秒int keepcount = 3; // 设置探测包发送次数为3次pthread_detach(pthread_self()); // 和主线程(他的父线程)分离printf("%s|%s|%d s_fd = %d\n", __FILE__, __func__, __LINE__, s_fd);if(-1 == s_fd) // 判断是否初始化成功{s_fd = tcpsocket_init();if(-1 == s_fd){printf("tcpsocket_init error\n");pthread_exit(0);}}if(NULL != arg)ctrl_info = (ctrl_info_t*)arg;if(NULL != ctrl_info)mqd = ctrl_info->mqd; if((mqd_t)-1 == mqd){pthread_exit(0); }memset(&c_addr, 0, sizeof(struct sockaddr_in));int clen = sizeof(struct sockaddr_in);printf("%s thread start\n", __func__);while (1) // 一直等待接收{c_fd = accept(s_fd, (struct sockaddr *)&c_addr, &clen); // 获得新的客户端 描述符if (c_fd == -1){continue;}ret = setsockopt(c_fd, SOL_SOCKET, SO_KEEPALIVE, (void *)&keepalive,sizeof(keepalive));if(-1 == ret){perror("setsockopt");break;}ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPIDLE, (void *)&keepidle, sizeof(keepidle));if(-1 == ret){perror("setsockopt");break;}ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPINTVL, &keepinterval,sizeof(keepinterval));if(-1 == ret){perror("setsockopt");break;}ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPCNT, &keepcount,sizeof(keepcount)); if(-1 == ret){perror("setsockopt");break;}// 打印调试信息printf("%s | %s | %d: Access a connection from %s:%d\n", __FILE__, __func__, __LINE__, inet_ntoa(c_addr.sin_addr), ntohs(c_addr.sin_port));while (1){memset(buffer, 0, BUF_SIZE);ret = recv(c_fd, buffer, BUF_SIZE, 0); // 等待接收// 将接收到数据打印出来printf("%s|%s|%d, 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);if (ret > 0){if(buffer[0] == 0xAA && buffer[1] == 0x55 &&buffer[4]==0x55 && buffer[5]==0xAA){printf("%s|%s|%d, send: 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);send_msg(mqd,buffer,ret); }}else if (0 == ret || -1 == ret) // 没读到,or 读到空{break;}}}pthread_exit(0);}struct control tcpsocket_control ={.control_name = "tcpsocket",.init = tcpsocket_init,.final = tcpsocket_final,.get = tcpsocket_get,.set = NULL, //不需要实现 设置.next = NULL
};struct control *add_tcpsocket_to_ctrl_list(struct control *phead)
{//头插法实现 添加链表节点return add_interface_to_ctrl_list(phead,&tcpsocket_control);};烟雾报警模块 - smoke_interfac.c
#include <pthread.h>
#include <wiringPi.h>
#include <stdio.h>#include "smoke_interface.h"
#include "control.h"
#include "mq_queue.h"
#include "global.h"
#include <netinet/tcp.h> // 设置 tcp 心跳 的参数#define SMOKE_PIN 6 // 烟雾报警模块接的引脚
#define SMOKE_MODE INPUTstatic int s_fd = -1;static int smoke_init(void)
{printf("%s|%s|%d\n",__FILE__,__func__,__LINE__);pinMode(SMOKE_PIN, SMOKE_MODE); // 引脚 和 模式配置return 0;
}static void smoke_final(void)
{// do nothing
}static void* smoke_get(void *arg)
{// AA 55 45 00 55 AA --> 45 00 -->触发警报int status = HIGH; //低电平有效 -- 默认设置为高电平int switch_status = 0; // 报警开关 -- 默认设置为不开 -- 0ssize_t byte_send = -1;unsigned char buffer[6] = {0xAA,0x55,0x00,0x00,0x55,0xAA};mqd_t mqd = -1;ctrl_info_t * ctrl_info = NULL; if(NULL != arg)ctrl_info = (ctrl_info_t*)arg;if(NULL != ctrl_info)mqd = ctrl_info->mqd; if((mqd_t)-1 == mqd){pthread_exit(0); }pthread_detach(pthread_self()); // 父子线程分离printf("%s thread start.\n",__func__);while(1){status = digitalRead(SMOKE_PIN); // 读取当前引脚状态if(LOW == status) // 探测到烟雾 -- 发生报警{switch_status = 1; // 打开报警器开关buffer[2] = 0x45;buffer[3] = 0x00;// 低电平触发警报 --//蜂鸣器是低电平触发 --> 我们这里把buffer 修改得与beep匹配,方便与他产生联系printf("%s|%s|%d, 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);byte_send = mq_send(mqd, buffer, 6,0); // 向消息队列里面发送数据 -- 接收到后语言模块会识别播报 - 火灾警报if (-1 == byte_send){continue;}}else if(HIGH == status && 1 == switch_status) // 未探测到烟雾,并且报警器开关还没关闭 -- 关闭报警器开关{switch_status = 0; // 关闭报警器开关buffer[2] = 0x45;buffer[3] = 0x01;//警报结束printf("%s|%s|%d, 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);byte_send = mq_send(mqd, buffer, 6,0);if (-1 == byte_send){continue;}}sleep(5);}pthread_exit(0); // 退出线程
}struct control smoke_control ={.control_name = "smoke",.init = smoke_init,.final = smoke_final,.get = smoke_get,.set = NULL, //不需要实现 设置.next = NULL
};struct control *add_smoke_to_ctrl_list(struct control *phead)
{return add_interface_to_ctrl_list(phead,&smoke_control);}
接收处理线程 - receive_interface.c
#include <pthread.h>
#include <mqueue.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <stdio.h>
#include <wiringPi.h>#include "receive_interface.h"
#include "control.h"
#include "mq_queue.h"
#include "global.h"
#include "face.h"
#include "myoled.h"
//#include "lrled_gdevice.h"
#include "gdevice.h"
// #include "fan_gdevice.h"
// #include "bled_gdevice.h"
// #include "beep_gdevice.h"
// #include "lock_gdevice.h"#include "ini.h"
#include "face.h"#define MATCH(s, n) strcmp(section, s) == 0 && strcmp(name, n) == 0/*
接收模块:
对接收到消息做出相应处理
包括 oled 人脸识别 语言播报 GPIO 引脚状态配置*/static int oled_fd = -1;
static struct gdevice *pdevhead = NULL;typedef struct
{int msg_len;unsigned char *buffer;ctrl_info_t *ctrl_info;
} recv_msg_t;static int handler_gdevice(void *user, const char *section, const char *name, const char *value)
{struct gdevice *pdev = NULL;if (NULL == pdevhead){pdevhead = (struct gdevice *)malloc(sizeof(struct gdevice));memset(pdevhead, 0, sizeof(struct gdevice));pdevhead->next = NULL;strcpy(pdevhead->dev_name, section);}// printf("section = %s, name = %s, value = %s\n", section, name, value);else if (0 != strcmp(section, pdevhead->dev_name)) // 当section对不上的时候,表示到了下一个设备{// 把新节点(设备)使用头插法插入pdev = (struct gdevice *)malloc(sizeof(struct gdevice));memset(pdev, 0, sizeof(struct gdevice));strcpy(pdev->dev_name, section);pdev->next = pdevhead;pdevhead = pdev;}if (NULL != pdevhead){if (MATCH(pdevhead->dev_name, "key")){sscanf(value, "%x", &pdevhead->key); // 把value(string)的值 转为int类型 16进行格式 传递给 pdevhead->key)printf("%d pdevhead->key = 0x%x\n", __LINE__, pdevhead->key);}else if (MATCH(pdevhead->dev_name, "gpio_pin")){pdevhead->gpio_pin = atoi(value);}else if (MATCH(pdevhead->dev_name, "gpio_mode")){if (strcmp(value, "OUTPUT") == 0){pdevhead->gpio_mode = OUTPUT;}else if (strcmp(value, "INPUT") == 0){pdevhead->gpio_mode = INPUT;}else{printf("gpio_mode error\n");}}else if (MATCH(pdevhead->dev_name, "gpio_status")){if (strcmp(value, "LOW") == 0){pdevhead->gpio_mode = LOW;}else if (strcmp(value, "HIGH") == 0){pdevhead->gpio_mode = HIGH;}else{printf("gpio_status error\n");}}else if (MATCH(pdevhead->dev_name, "check_face_status")){pdevhead->check_face_status = atoi(value);}else if (MATCH(pdevhead->dev_name, "voice_set_status")){pdevhead->voice_set_status = atoi(value);}}return 1;
}static int receive_init(void)
{// pdevhead = add_lrled_to_gdevice_list(pdevhead); // 头插法加入 客厅灯// pdevhead = add_bled_to_gdevice_list(pdevhead); // 加入卧室灯// pdevhead = add_fan_to_gdevice_list(pdevhead); // 加入风扇// pdevhead = add_beep_to_gdevice_list(pdevhead); // 蜂鸣器// pdevhead = add_lock_to_gdevice_list(pdevhead); // 开锁if (ini_parse("/etc/gdevice.ini", handler_gdevice, NULL) < 0) {printf("Can't load 'gdevice.ini'\n");return 1;}struct gdevice *pdev = NULL;pdev = pdevhead;while (pdev != NULL){// printf("inside %d",__LINE__);printf("dev_name:%s\n", pdev->dev_name);printf("key:%x\n", pdev->key);printf("gpio_pin:%d\n", pdev->gpio_pin);printf("gpio_mode:%d\n", pdev->gpio_mode);printf("gpio_status:%d\n", pdev->gpio_status);printf("check_face_status:%d\n", pdev->check_face_status);printf("voice_set_status:%d\n", pdev->voice_set_status);pdev = pdev->next;}// 设备类链表添加oled_fd = myoled_init(); // 初始化oledface_init(); // 初始化人脸识别return oled_fd;
}static void receive_final(void)
{face_final();if (-1 != oled_fd){close(oled_fd); // 关闭oled 打开的文件oled_fd = -1; // 复位}
}// 处理设备 -- 比如打开灯 和风扇等static void *handler_device(void *arg)
{pthread_detach(pthread_self()); // 和主线程(他的父线程)分离recv_msg_t *recv_msg = NULL;struct gdevice *cur_gdev = NULL;char success_or_failed[20] = "success";pthread_t tid = -1;int smoke_status = 0;double face_result = 0.0; //存放人脸匹配度int ret = -1;if (NULL != arg) // 有参数{recv_msg = (recv_msg_t *)arg; // 获取参数printf("recv_len = %d\n", recv_msg->msg_len);printf("%s|%s|%d, handler: 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n", __FILE__, __func__, __LINE__,recv_msg->buffer[0], recv_msg->buffer[1], recv_msg->buffer[2], recv_msg->buffer[3], recv_msg->buffer[4], recv_msg->buffer[5]);}// need to do somethingif (NULL != recv_msg && NULL != recv_msg->buffer) // if 消息队列非空,并且buffer 里面接收到数据{// recv_msg->buffer[2] --> 第三位 用于存放设备类型cur_gdev = find_device_by_key(pdevhead, recv_msg->buffer[2]);printf("%s|%s|%d,find success buffer[2] = 0x%x \n", __FILE__, __func__, __LINE__, recv_msg->buffer[2]);}if (NULL != cur_gdev) // if 能找到的这设备 --> 设备存在{printf("%s|%s|%d, cur_gdev \n", __FILE__, __func__, __LINE__);// BUFFER 的第四个参数 用于 存放开关状态 0 表示开, 1 表示关cur_gdev->gpio_status = recv_msg->buffer[3] == 0 ? LOW : HIGH; // 获取状态存入cur_gdev中//人脸识别if(1 == cur_gdev->check_face_status){face_result = face_status(); //得到人脸识别的匹配度if(face_result > 0.6){ //匹配成功ret = set_gpio_device_status(cur_gdev); // 设置电平 --> 开锁recv_msg->buffer[2] = 0x47; //识别成功的语音播报}else{recv_msg->buffer[2] = 0x46;}}else if( 0 == cur_gdev->check_face_status){// printf("%s|%s|%d,Set before set_gpio_device_status\n",__FILE__,__func__,__LINE__);ret = set_gpio_device_status(cur_gdev); // 将获取到的状态真正赋值给引脚// printf("%s|%s|%d, after set_gpio_device_status \n",__FILE__,__func__,__LINE__);}printf("%s|%s|%d, = %d\n", __FILE__, __func__, __LINE__,cur_gdev->voice_set_status);// 需要语言播报if (1 == cur_gdev->voice_set_status) {printf("%s|%s|%d,2\n", __FILE__, __func__, __LINE__);if (NULL != recv_msg && NULL != recv_msg->ctrl_info && NULL != recv_msg->ctrl_info->ctrl_phead){printf("%s|%s|%d,2\n", __FILE__, __func__, __LINE__);struct control *pcontrol = recv_msg->ctrl_info->ctrl_phead;while (NULL != pcontrol){if (strstr(pcontrol->control_name, "voice")) //匹配到语言播报{if (0x45 == recv_msg->buffer[2] && 0 == recv_msg->buffer[3]) // 语音播报 打开{smoke_status = 1;}pthread_create(&tid, NULL, pcontrol->set, (void *)recv_msg->buffer); // 新开线程区进行语言播报break;}pcontrol = pcontrol->next;}}}printf("%s|%s|%d,2\n", __FILE__, __func__, __LINE__);if (-1 == ret) // 设置失败{printf("%s|%s|%d,2\n", __FILE__, __func__, __LINE__);memset(success_or_failed, '\0', sizeof(success_or_failed));strncpy(success_or_failed, "failed", 6);}printf("%s|%s|%d,2\n", __FILE__, __func__, __LINE__);// 配置OLEDchar oled_msg[512];memset(oled_msg, 0, sizeof(oled_msg));char *change_status = cur_gdev->gpio_status == LOW ? "Open" : "Close";sprintf(oled_msg, "%s %s %s!\n", change_status, cur_gdev->dev_name, success_or_failed);if(smoke_status == 1){memset(oled_msg, 0, sizeof(oled_msg));sprintf(oled_msg, "A risk of fire!\n");} myoled_show(oled_msg);//让门打开5s自动关闭if(1 == cur_gdev->check_face_status && 0 == ret && face_result >0.6){sleep(5); //开门5s后关门cur_gdev->gpio_status = HIGH; //设置高电平(低电平有效)ret = set_gpio_device_status(cur_gdev); //关门}}pthread_exit(0);
}static void *receive_get(void *arg) // 接收消息队列里面的 数据
{printf("enter receive_get\n");// 通过参数 初始化我们 定义的recv_msg_t 结构体recv_msg_t *recv_msg = NULL;unsigned char *buffer = NULL;struct mq_attr attr;pthread_t tid = -1;ssize_t read_len = -1;if (NULL != arg){recv_msg = (recv_msg_t *)malloc(sizeof(recv_msg_t));recv_msg->ctrl_info = (ctrl_info_t *)arg; // 这里实际上就获取到了mqd 和 phead(我们需要操作的struct control 链表 的头节点)recv_msg->msg_len = 0;recv_msg->buffer = NULL;}elsepthread_exit(0);if (mq_getattr(recv_msg->ctrl_info->mqd, &attr) == -1){ // 获取消息队列失败 -- 异常pthread_exit(0);}// 能获取到消息队列recv_msg->buffer = (unsigned char *)malloc(attr.mq_msgsize); // 分配内存buffer = (unsigned char *)malloc(attr.mq_msgsize);// mq_msgsize -- 每条消息的大小memset(recv_msg->buffer, 0, attr.mq_msgsize); // 初始化memset(buffer, 0, attr.mq_msgsize); // 初始化pthread_detach(pthread_self()); // 和主线程(他的父线程)分离while (1){read_len = mq_receive(recv_msg->ctrl_info->mqd, buffer, attr.mq_msgsize, NULL);printf("%s|%s|%d, recv: 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n", __FILE__, __func__, __LINE__, buffer[0], buffer[1], buffer[2], buffer[3], buffer[4], buffer[5]);printf("%s|%s|%d: read_len = %ld\n", __FILE__, __func__, __LINE__, read_len);if (-1 == read_len){ // 接收失败if (errno == EAGAIN){printf("queue is empty\n");}else{break;}}// 以下是接收到正常数据的情况else if (buffer[0] == 0xAA && buffer[1] == 0x55 && buffer[4] == 0x55 && buffer[5] == 0xAA){recv_msg->msg_len = read_len;memcpy(recv_msg->buffer, buffer, read_len);// 创建线程去 处理我们的接收到的信号pthread_create(&tid, NULL, handler_device, (void *)recv_msg);}}if (NULL != recv_msg)free(recv_msg);if (NULL != buffer)free(buffer);pthread_exit(0);
}struct control receive_control = {.control_name = "receive",.init = receive_init,.final = receive_final,.get = receive_get,.set = NULL, // 不需要实现 设置.next = NULL};struct control *add_receive_to_ctrl_list(struct control *phead)
{// 头插法实现 添加链表节点return add_interface_to_ctrl_list(phead, &receive_control);
};
编译运行
环境配置:
// 我们人脸识别开门模块调用了阿里云的sdk,请确保arm设上已经安装了对应SDK,和阿里云服务配置,请去这里安装指示配置(按照指示下载SDK,添加阿里云AccessKey)
人脸识别_身份验证识别_客流分析系统_人脸门禁闸机-阿里云 (aliyun.com)
编译
由于文件众多,我们采用Makefile,来编译
Makefile
CC := aarch64-linux-gnu-gccSRC := $(shell find src -name "*.c")INC := ./inc \./3rd/usr/local/include \./3rd/usr/include \./3rd/usr/include/python3.10 \./3rd/usr/include/aarch64-linux-gnu/python3.10 \./3rd/usr/include/aarch64-linux-gnuOBJ := $(subst src/,obj/,$(SRC:.c=.o))TARGET=obj/smarthomeCFLAGS := $(foreach item, $(INC),-I$(item)) # -I./inc -I./3rd/usr/local/includeLIBS_PATH := ./3rd/usr/local/lib \./3rd/lib/aarch64-linux-gnu \./3rd/usr/lib/aarch64-linux-gnu \./3rd/usr/lib/python3.10 \
#L
LDFLAGS := $(foreach item, $(LIBS_PATH),-L$(item)) # -L./3rd/usr/local/libsLIBS := -lwiringPi -lpython3.10 -pthread -lexpat -lz -lcryptobj/%.o:src/%.cmkdir -p obj$(CC) -o $@ -c $< $(CFLAGS)$(TARGET) :$(OBJ)$(CC) -o $@ $^ $(CFLAGS) $(LDFLAGS) $(LIBS)scp obj/smarthome ini/gdevice.ini orangepi@192.168.1.18:/home/orangepicompile : $(TARGET)clean:rm $(TARGET) obj $(OBJ) -rf
debug:echo $(CC)echo $(SRC)echo $(INC)echo $(OBJ)echo $(TARGET)echo $(CFLAGS)echo $(LDFLAGS)echo $(LIBS).PHONY: clean compile debug可以看到我的Makefile 里面添加了scp传送,请根据自己的派的ip进行修改
运行:
sudo -E ./smarthome
sudo -- 因为我们调用了wiringpi库来调节电平,需要访问到系统文件
-E 保持环境,即我们可以使用root用户里面配置的AccessKey,来访问阿里云的接口
相关文章:
智能家居完结 -- 整体设计
系统框图 前情提要: 智能家居1 -- 实现语音模块-CSDN博客 智能家居2 -- 实现网络控制模块-CSDN博客 智能家居3 - 实现烟雾报警模块-CSDN博客 智能家居4 -- 添加接收消息的初步处理-CSDN博客 智能家居5 - 实现处理线程-CSDN博客 智能家居6 -- 配置 ini文件优化设备添加-CS…...
)
双指针用法练习题(2024/5/26)
1三数之和 给你一个整数数组 nums ,判断是否存在三元组 [nums[i], nums[j], nums[k]] 满足 i ! j、i ! k 且 j ! k ,同时还满足 nums[i] nums[j] nums[k] 0 。请 你返回所有和为 0 且不重复的三元组。 注意:答案中不可以包含重复的三元…...
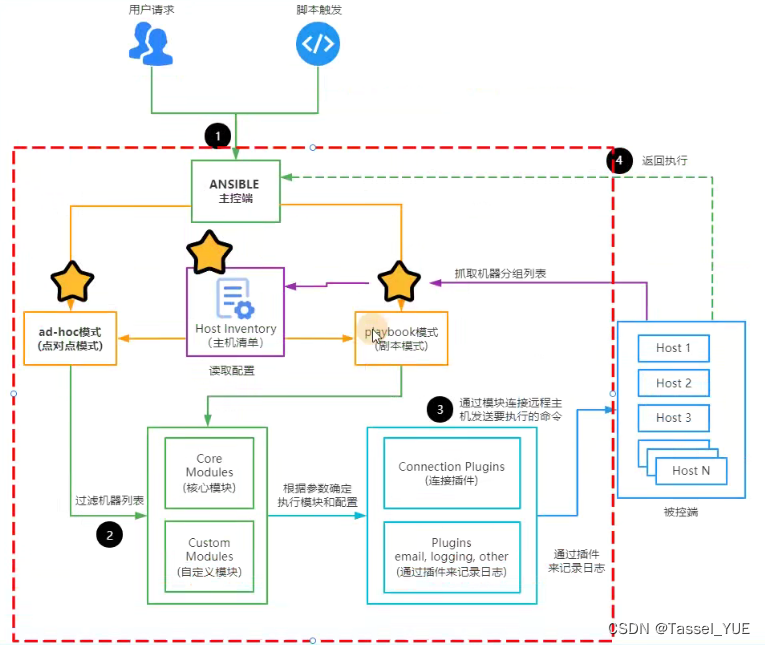
Ansible02-Ansible Modules模块详解
目录 写在前面4. Ansible Modules 模块4.1 Ansible常用模块4.1.1 Command模块4.1.2 shell模块4.1.3 scrpit模块4.1.4 file模块4.1.5 copy模块4.1.6 lineinfile模块4.1.7 systemd模块4.1.8 yum模块4.1.9 get_url模块4.1.10 yum_repository模块4.1.11 user模块4.1.12 group模块4.…...
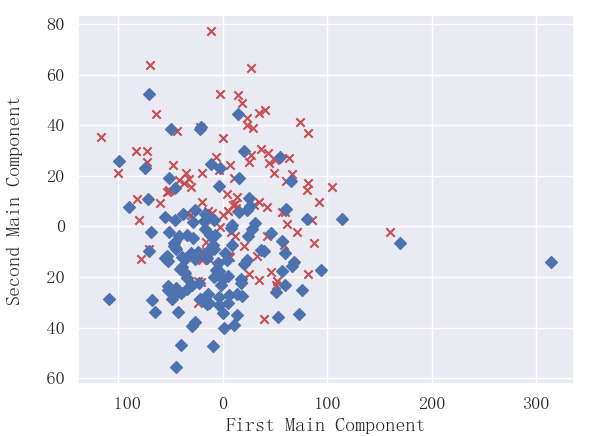
【Python特征工程系列】一文教你使用PCA进行特征分析与降维(案例+源码)
这是我的第287篇原创文章。 一、引言 主成分分析(Principal Component Analysis, PCA)是一种常用的降维技术,它通过线性变换将原始特征转换为一组线性不相关的新特征,称为主成分,以便更好地表达数据的方差。 在特征重要…...

【Linux】Ubuntu系统挂载NAS文件夹
测试系统:Ubuntu24.02 1. 安装必要的软件包 sudo apt update sudo apt install cifs-utils 2. 创建挂载点 sudo mkdir -p /mnt/nas 3. 获取当前用户的 UID 和 GID id -u id -g 4. 挂载:设置用户名/密码/nas地址 sudo mount -t cifs -o username,…...
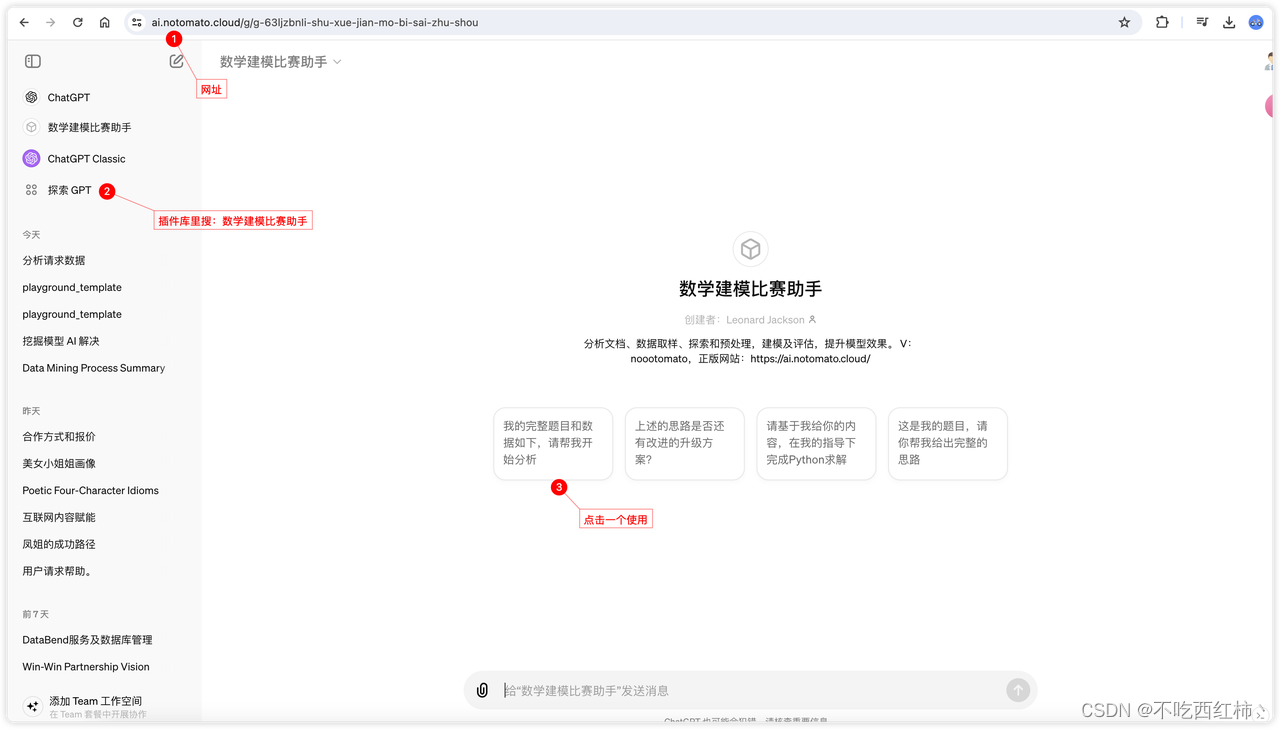
如何用ai打一场酣畅淋漓的数学建模比赛? 给考研加加分!
文章目录 数学建模比赛1. 数学建模是什么?2. 数学建模分工合作2.1 第一:组队和分工合作2.2 第二:充分的准备2.3 第三:比赛中写论文过程 3. 数学建模基本过程4. 2023全年数学建模竞赛时间轴5. 数学建模-资料大全6. 数学建模实战 数…...
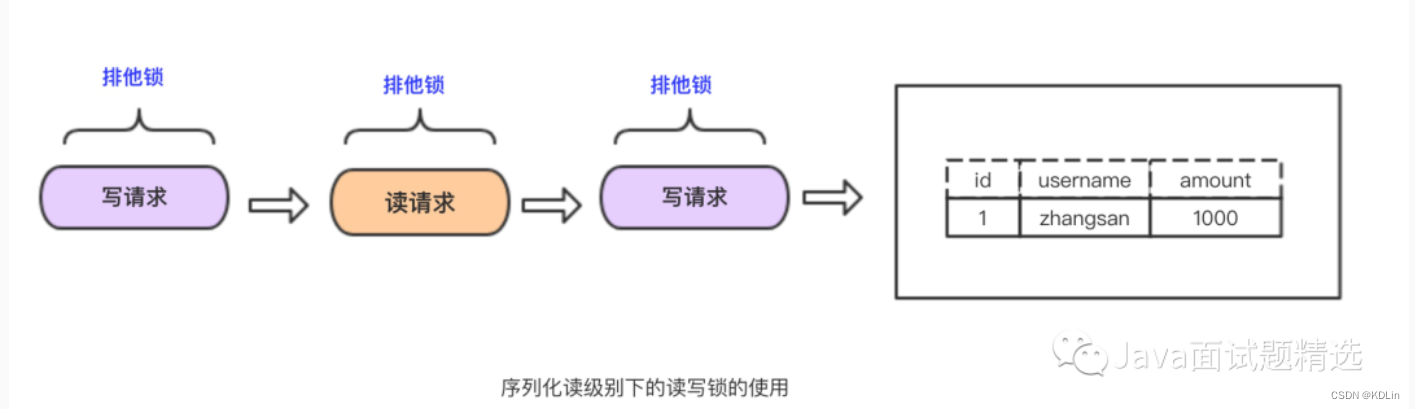
深入浅出MySQL事务实现底层原理
重要概念 事务的ACID 原子性(Atomicity):即不可分割性,事务中的操作要么全不做,要么全做一致性(Consistency):一个事务在执行前后,数据库都必须处于正确的状态…...
SVM兵王问题
1.流程 前面六个就是棋子的位置,draw就是逼和,后面的数字six就代表,白棋最少用六步就能将死对方。然后呢,可以看一下最后一个有几种情况: 2.交叉测试 leave one out: 留一个样本作测试集,其余…...

yolov5_obb
yolov5_obb: 旋转目标检测从数据制作到终端部署全流程教学...
NextJs 初级篇 - 安装 | 路由 | 中间件
NextJs 初级篇 - 安装 | 路由 | 中间件 一. NextJs 的安装二. 路由2.1 路由和页面的定义2.2 布局的定义和使用2.3 模板的定义和使用① 模板 VS 布局② 什么是 use client 2.4 路由跳转的方式2.5 动态路由2.6 路由处理程序① GET 请求的默认缓存机制② 控制缓存或者退出缓存的手…...

变分自动编码器(VAE)深入理解与总结
本文导航 0 引言1 起源1.1 自编码器的任务定义1.2 自编码器存在的问题1.3 VAE的核心思路 2 VAE的建模过程2.1 VAE的任务定义2.2 真实分布 ϕ \phi ϕ是什么,为什么要逼近这个分布的参数,如何做?2.3 “重参数化(Reparameterization…...

Leetcode 剑指 Offer II 079.子集
题目难度: 中等 原题链接 今天继续更新 Leetcode 的剑指 Offer(专项突击版)系列, 大家在公众号 算法精选 里回复 剑指offer2 就能看到该系列当前连载的所有文章了, 记得关注哦~ 题目描述 给定一个整数数组 nums ,数组中的元素 互不相同 。返…...

Linux基础命令常见问题解决方案
Linux 基础命令常见问题解决方案 在Linux的日常使用中,用户经常会遇到各种各样的问题。本文旨在提供一个关于Linux基础命令的常见问题及其解决方案的全面指南。我们将覆盖30种不同的错误场景,并给出具体的解决步骤和示例,帮助初学者快速定位…...
 ——使用LINQ进行匿名对象初始化)
LINQ(五) ——使用LINQ进行匿名对象初始化
总目录 C# 语法总目录 上一篇:LINQ(四) ——使用LINQ进行对象类型初始化 LINQ 五 ——使用LINQ进行匿名对象初始化 6.2 匿名类型 6.2 匿名类型 可以不用声明定义一个对象,直接使用new,然后直接赋值即可 string[] names { "Tom",…...
1小时从0开始搭建自己的直播平台(详细步骤)
本文讲述了如何从0开始,利用腾讯云的平台,快速搭建一个直播平台的过程。 文章目录 效果图详细步骤准备工作第一步:添加域名并检验cname配置1.先填加一个推流域名2. 点击完下一步,得到一个cname地址3. 将cname地址,配置…...

Python打包篇-exe
文章目录 pyinstallerauto-py-to-exe pyinstaller 命令行工具,语法自行查看官方help pip install pyinstallerauto-py-to-exe 基于pyinstaller的一款GUI工具,会自行打包py文件中依赖的库 pip install auto-py-to-exe auto-py-to-exe.exe //运行即可...

游戏找不到d3dcompiler_43.dll怎么办,教你5种可靠的修复方法
在电脑使用过程中,我们经常会遇到一些错误提示,其中之一就是“找不到d3dcompiler43.dll”。这个问题通常出现在游戏或者图形处理软件中,它会导致程序无法正常运行。为了解决这个问题,我经过多次尝试和总结,找到了以下五…...

如何使用多种算法解决LeetCode第135题——分发糖果问题
❤️❤️❤️ 欢迎来到我的博客。希望您能在这里找到既有价值又有趣的内容,和我一起探索、学习和成长。欢迎评论区畅所欲言、享受知识的乐趣! 推荐:数据分析螺丝钉的首页 格物致知 终身学习 期待您的关注 导航: LeetCode解锁100…...
泰拉瑞亚从零开始的开服教程
前言 本教程将讲诉使用Linux系统搭建泰拉瑞亚服务器(因为网上已经有很完善的windows开服教程了),使用的Linux发行版是Debian11,服务端使用的程序是TShock,游戏版本是1.4.4.9 所需要准备的 一台服务器(本教程使用的是…...
【云原生】K8s管理工具--Kubectl详解(一)
一、陈述式管理 1.1、陈述式资源管理方法 kubernetes 集群管理集群资源的唯一入口是通过相应的方法调用 apiserver 的接口kubectl 是官方的 CLI 命令行工具,用于与 apiserver 进行通信,将用户在命令行输入的命令,组织并转化为apiserver 能识…...

完整解决方案:PL2303 Windows 10驱动快速安装指南
完整解决方案:PL2303 Windows 10驱动快速安装指南 【免费下载链接】pl2303-win10 Windows 10 driver for end-of-life PL-2303 chipsets. 项目地址: https://gitcode.com/gh_mirrors/pl/pl2303-win10 如果你正在Windows 10系统上使用PL-2303HXA或PL-2303XA芯…...

10.刷机变砖、IMEI 丢失、基带未知、触控失灵?一站式终极修复方案
摘要 本文面向具备基础计算机操作能力的维修从业者与高级用户,系统讲解当前主流品牌手机(华为、小米、OPPO、vivo、一加、苹果)的刷机与维修核心流程。内容涵盖底层引导架构差异、Fastboot/Recovery/DFU模式操作规范、分区表保护策略、驱动兼容性处理以及常见硬件故障的软件…...

终极指南:如何用Hindsight为聊天机器人添加长期记忆功能
终极指南:如何用Hindsight为聊天机器人添加长期记忆功能 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight是一个革命性的AI代理记忆系统,专门为聊…...

从零开始,在Hermes Agent项目中接入Taotoken服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从零开始,在Hermes Agent项目中接入Taotoken服务 基础教程类,引导使用Hermes Agent框架的开发者完成接入&a…...

Frida Spawn与Attach模式深度解析:Android加固对抗决策指南
1. 为什么刚学Frida的人总在Spawn和Attach之间反复横跳? “Frida Hook跑不起来”——这是我过去三年在安全技术社区、逆向学习群、CTF训练营里听到最多的一句抱怨。但真正拆开看,90%的问题根本不是代码写错了,也不是目标App加固太强ÿ…...

【开源】前端拖拽表单设计器 自定义表单
【开源】开源 VUE拖拽表单设计器 自定义表单 开源 tduck-platform: Tduck-填鸭收集器是一款开源的表单在线收集系统,后台基于SpringBootMybatisPlusMySqlRedis,前端基于Vue ElementUI开发,功能强大,界面美观。keywords࿱…...

Selenium自动化绕过反爬:彻底清除webdriver指纹的三层策略
1. 为什么“移除 webdriver 标志”成了自动化测试与爬虫绕过的第一道门槛 你有没有遇到过这样的情况:用 Selenium 写好了一套完整的电商比价脚本,本地跑得丝滑流畅,一上服务器或换台新机器就频繁触发验证码,甚至直接返回 403&…...

源代码论文分享|基于Java的医院急诊系统!
有些项目一看题目就知道,难度不会太水,也不会空得没东西写。医院急诊系统就是这种类型。它有明确的使用场景,也有比较完整的业务流程,适合用来做 Java 方向的毕业设计或课程项目。 这次分享的是一套关于基于Java的医院急诊系统的…...

E-ROBOT:融合熵正则化与鲁棒截断的最优传输新框架
1. E-ROBOT框架:从理论动机到核心思想拆解在机器学习和统计学中,我们常常需要比较和度量两个概率分布之间的差异。最优传输(Optimal Transport, OT)为此提供了一个优雅且几何直观的数学框架:它寻找一个“运输计划”&am…...

iOS Frida spawn失败排查:Bundle ID匹配与MobileInstallation缓存解析
1. 这个报错不是App没装,而是Frida根本“看不见”它刚接触iOS逆向的朋友常被这句报错卡住好几天:“Failed to spawn: unable to find application with identifier”。第一反应是——我明明在手机上装了这个App,图标就在主屏,为什…...