SARscape雷达图像处理软件简介
合成孔径雷达(SAR)拥有独特的技术魅力和优势,渐成为国际上的研究热点之一,其应用领域越来越广泛。SAR数据可以全天候对研究区域进行量测、分析以及获取目标信息。高级雷达图像处理工具SARscape,能让您轻松将原始SAR数据进行处理和分析,输出SAR图像产品、数字高程模型(DEM)和地表形变图等信息,并可以将提取的信息与光学遥感数据、地理信息集成在一起,全面提升SAR数据应用价值。
1 概述
SARscape由sarmap公司研发,是国际知名的雷达图像处理软件。该软件架构于专业的ENVI遥感图像处理软件之上,提供图形化操作界面,具有专业雷达图像处理和分析功能。SARscape由核心模块及5个扩展模块组成,用户可根据自己的应用要求、资金情况合理地选择不同功能模块及其不同组合,对系统进行剪裁,充分利用软硬件资源,并最大限度地满足用户的专业应用要求。
1.1体系结构
SARscape提供全方位的SAR数据处理能力,并引入GPU和并行运算提高处理效率,包括:
- 雷达强度图像处理(SAR Intensity Image)
- 雷达干涉测量(InSAR/DInSAR)
- 极化雷达处理(PolSAR)
- 极化雷达干涉测量(PoIInSAR)
- 雷达立体量测
由以下模块组成:
- SARscape核心模块(BASIC & InSAR Bundle)—— 提供完整的雷达处理功能,包括基本SAR数据的数据导入、多视、几何校正、辐射校正、去噪、地理编码、RAW数据镶嵌、线状地物探测、特征提取、船只提取、移动目标探测等一系列基本处理功能;支持InSAR和多个通道DInSAR处理,生成干涉图像、相干图像、地面断层图、DEM、地表形变图等。包括基线估算、干涉图生成、干涉图去平、相干性计算、相位解缠、轨道精炼、大气校正、形变模型等;支持SAR立体量测生成DEM数据;支持多孔径干涉测量和振幅偏移量量测,获取方位向形变信息;提供相干RGB假彩色合成工具和相干变化检测工具。
- 聚焦扩展模块(Focusing Module)——采用经过优化的聚焦算法,能够充分利用处理器的性能实现数据快速聚焦处理,支持聚焦前对RAW数据的镶嵌,直接输出SLC数据。
- 滤波扩展模块(Filter Module)——提供基于Gamma/Gaussian 分布式模型的滤波核,能够最大程度地去除斑点噪声,同时保留雷达图像的纹理属性和空间分辨率信息。
- 扫描式干涉雷达处理扩展模块(ScanSAR Interferometry Module)——支持ASAR、TSX和PALSAR2扫描模式数据的干涉处理。
- 极化雷达处理扩展模块(Polarimetery & PollnSAR Module)——完整的极化SAR和极化干涉SAR数据的处理,包括测定偏振矩阵、偏振信号、偏振合成、偏振特征、Pauli分解、SLC数据的几何校正、极化相位差和干涉图生成、极化/干涉相干性、相干性优化等。
- 干涉叠加扩展模块(Interferometry Stacking Module)——可用永久散射体(PS)方法和短基线集(SBAS)的方法进行多时相雷达数据的干涉分析,可以获取毫米级的形变信息。可用层析SAR的方法进行多时相连续层析成像数据的分析,可以获取地物的高度和形变信息。
SARscape提供SAR处理Task,可在ENVI Modeler中构建SAR处理工作流。
SARscape以模块(Module)方式提供API,用户只需要具有一些IDL开发基础即可进行二次开发,提供了超过200个的功能接口。
1.2支持雷达系统
SARscape是为各种雷达数据处理而设计的专业化软件工具,提供了专业级雷达数据处理和分析功能,支持多种雷达数据产品和原始数据,包括一系列机载和星载雷达系统的数据,包括:ERS-1/2、JERS-1 SAR、RADARSAT-1、RADARSAT-2、ENVISAT ASAR、ALOS PALSAR、TerraSAR-X、TanDEM-X(+bistatic)、SAR-Lupe、 COSMO-SkyMed、OrbiSAR-1 (X、P-band)、E-SAR、F-SAR、RISAT-1、STANAG 7023、RAMSES、TELAER、GLAS/IceSat DEM、Sentinel-1(哨兵)、 Kompsat-5、ALOS PALSAR2、ASNARO-2、PAZ-1、SICD、SICD Polar format algorithm PFA、NovaSAR、ICEYE、SAOCOM-1、CAPELLA-X、CSG-X、Radarsat Constellation Mission-C以及国产GF3、海丝一号数据。
1.3产品特性
- 原生支持64位操作系统,使用GPU技术,多线程计算技术、具有高效的运算性能;
- 提供集群处理(包括SBAS、PS和CCD三个功能,需要许可),提高大数据量运算效率;
- 提供SAR数据的数据导入、多视、几何校正、辐射校正、去噪、特征提取等基本功能;
- 全面支持Sentinel-1数据;
- 全面支持GF3数据;
- 利用多时相数据进行斑噪滤波,有效去除斑点噪声;
- 提供基于多普勒距离方程的严格SAR数据几何校正,在DEM支持下能够实现对SAR数据的辐射校正和正射纠正,消除地形对SAR数据的影响;
- 对于提供卫星轨道信息的SAR数据(如ERS和ASAR等),无需控制点即可进行高精度的正射纠正;
- 使用交叉相关技术实现多时相SAR数据的配准,无需手工选择控制点;
- 提供CCD相干性变化检测工具,通过相干性分析发现土地覆盖变化信息;
- 提供船只探测和移动目标探测工具;
- 提供基于相位保真的SAR原始数据调焦处理,能够获取高精度的SLC数据,支持自定义雷达系统;
- 提供基于Gamma/Gaussian分布式模型的滤波核,能够最大程度地去除斑点噪声,同时保留雷达图像的纹理属性和空间分辨率;
- 可用于InSAR和多个通道DInSAR图像,生成干涉图像、相干图像、地面断层图、DEM、形变图等;
- 提供MAI多孔径干涉工具,得到方位向上的形变图;
- 提供SAR立体量测工具,通过SAR立体量测生成DEM产品;
- 提供振幅偏移量测工具,通过振幅偏移量测的方法得到方位向形变信息;
- 提供形变建模工具,通过构建形变模型模拟出形变的量和断裂带;
- 支持中分辨率(如ASAR宽模式)数据的InSAR和DInSAR处理;
- 支持极化SAR和极化干涉SAR数据的处理,可以确定特征地物在地面上产生的毫米级的位移;
- 提供三种干涉叠加工具:永久散射体(PS)、短基线(SBAS)、层析SAR,得到毫米级形变监测精度;
- 提供升轨和降轨数据集得到的形变结果的合成工具,得到水平方向和垂直方向的速率/形变/时间序列形变结果;
- 提供SARscape Modeler,可以在ENVI Modeler中进行可视化建模;
- 提供SARscape for ArcGIS toolbox , 可在ArcGIS 界面下直接使用SARscape tools;
- 与ArcGIS Pro集成,可以在ArcGIS Pro中使用SARscape工具箱;
- 以模块(Module)的方式提供API,包含了200个左右的功能接口。而且在参数设置方面,与SARscape用户界面中的参数保持一致,方便使用;
- 图形化界面,界面友好;
- 流程化处理,操作简单;
- 批处理能力:繁杂的处理步骤只通过一个批处理命令来完成,简化操作;
- 支持二次开发。
1.4产品应用
SARscape主要应用于高精度地形数据(DEM)提取, 地表沉降监测(如地震/火山前后地表形变、城市地面沉降、铁路/地铁沿线地表沉降、采矿区塌陷、地裂缝等),滑坡/冰川移动监测,目标识别与跟踪,原油泄漏跟踪,作物生长跟踪与产量评估,洪水/火灾和地震的灾害评估等,土地覆盖与土地利用变化。
2 核心模块功能介绍
2.1 基本雷达处理
- 数据导入
支持SAR数据, 光学数据,高程数据(DEM),矢量数据、AIS数据、SICD格式数据的输入,这些数据可以是标准格式的,也可以是一般二进制格式的。
支持ECMWF、OpenStreetMap、Tide Height数据的下载。
- 多视
支持多种雷达系统的SLC数据多视处理,包括: ENVISAT ASAR、ERS/JERS-1、ALOS PALSAR-1/2、COSMO-SkyMed、TerraSAR-X、Sentinel-1A/B、Gaofen-3等,能抑制SAR图像的斑点噪声,提供自动计算视数的功能。提供时间域、频率域的多视算法。
- 配准
使用交叉相关技术实现多时相SAR数据的自动配准,以达到亚像素配准精度,整个过程采用全自动的方式。
- 滤波
提供一系列基于典型最小均方根误差原理的常规滤波算法,支持多时相的雷达滤波方法,算法包含相同区域不同场景的统计计算。提供针对超高空间分辨率数据的Non-Local滤波方法,保留了点目标,对均匀区域进行了强平滑处理。
- 特征提取
基于统计学的理论,能够从SAR和InSAR数据中提取不同特征的特征参数,用于图像分类或定量分析,雷达图像几何纠正和辐射定标。
- 地理编码
该功能能够对SAR数据进行几何校正与正射校正,可以对SAR数据进行椭球或地形的地理编码,可使用标准轨道参数或地面控制点,基于多普勒距离方程将雷达坐标系统转换为给定的地理参考坐标系,即完成一般几何校正或正射纠正过程。无论是地面阵列(ERS PRI, RADARSAT SGF)还是倾斜阵列(ERS and RADARSAT SLC)产品。
- 辐射定标
校正了三种影响因素:散射区域、雷达天线增益和方位向传输损失。可选择三种定标输出结果:后向散射系数(Sigma),归一化后向散射系数(Gamma),雷达亮度或者反射值(Beta)。还包括辐射归一化、局部入射角校正和叠掩/阴影处理。
- 定标后处理
可以对后向散射系数进行后处理,减少水分、表面特征等干扰介电常数而产生对后向散射系数的影响,提供距离校正、介电常数影响校正、绝对校正三种校正方法。
- 镶嵌
可以将覆盖相同区域的多幅雷达影像拼接成一幅,提供基于边缘检测技术自动生成切割线。支持SLC镶嵌。
- 分割
支持雷达或者光学的分割,分为三步:地物边缘检测、分割斑块合并、多时相数据分割。
- 强度数据时间序列分析工具
对多时相SAR数据时序分析的流程化工具,工作流中包含以:多时相slc数据输入、多视处理、多时相强度数据配准、多时相强度数据滤波、地理编码和辐射定标、多时相数据特征计算。
- 移动目标探测
从输入的高分辨率SLC图像中探测方位向的移动目标。
- 船只探测
基于CFAR算法,从SAR图像中提取水域中的船只信息。结合AIS船舶数据进行船只探测,统计某个区域船舶的月平均数量。
2.2 (D)InSAR处理
提供完整的干涉雷达(InSAR)和差分干涉(D-InSAR)处理功能,以及Tandem-X双星模式InSAR处理、SAR立体量测生成DEM技术、多孔径干涉测量处理、振幅偏移量测技术、相干性RGB合成、相干变化检测技术。包括以下干涉雷达处理功能:
- 基线估算
用来评价干涉像对的质量,计算基线、轨道偏移(距离向和方位向)和其他系统参数。
- 干涉图生成
支持两种模式:基于DEM和平均椭球体高度。
- 干涉图去平
从原来的SAR几何中减去相关的地形(或椭球)和常位相成分。
- 自适应滤波和相干系数生成
对去平后的干涉图进行滤波,去掉由平地干涉引起的位相噪声。同时生成干涉的相干图。
- 相位解缠
通过区域生长方法进行相位解缠,获取地面上每一点相位差的整数部分,为计算准确DEM奠定基础。
- 相位编辑 (可选)
通过半自动或全手动的方法纠正解缠中出现的错误
- 轨道修正
对卫星轨道和位相偏移进行纠正,进行轨道精炼和位相偏移的计算,消除可能的斜坡位相。
- DEM生成
生成DEM,将绝对定标和解缠后的相位和综合相位进行合成,将其转换为高度并投影到一定坐标系统上。
- 位移生成
将绝对定标并解缠后的相位值转换为位移,并投影到指定坐标系统下。同时也生成定位后的相干性图像。
SARscape支持双过、三过、四过差分两种方式,从DInSAR数据中生成微分干涉图以评估厘米级的地形变化。
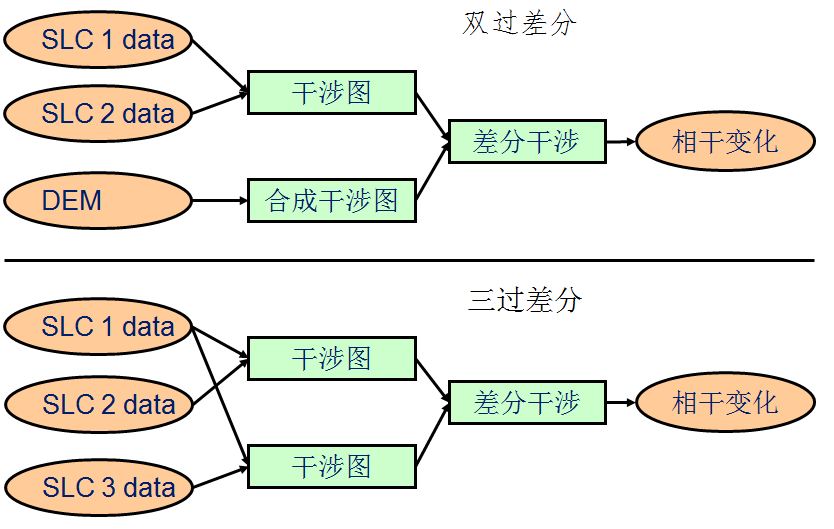
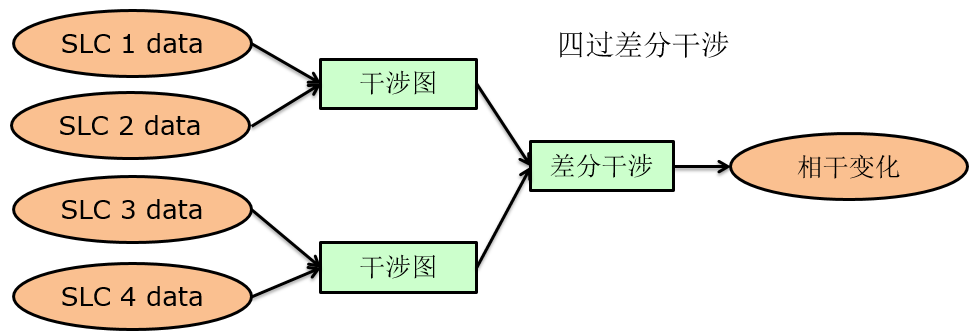
图:三种D-InSAR处理方法
- SAR立体量测生成DEM工具
用不同的入射角获取的高分辨率的斜距或地距数据,通过立体量测的方法生成的DEM。
- 多孔径干涉测量工具(MAI)
多孔径干涉测量技术是将构成干涉像对的一对数据,在主影像和从影像的原始的多普勒带宽上分解成多个小的全频谱复数数据,派生出一个前视和一个后视复数影像。分别对这些前视和后视的干涉像对进行差分干涉处理,然后将前、后视干涉图进行相位差分,得到一个代表方位向位移的差分干涉图,这种方法能得到方位向上的地表位移量。
提供完整的MAI处理功能,包括:MAI干涉图生成和去平地效应、MAI干涉图滤波和相干性生成、MAI相位解缠、轨道精炼和重去平、相位转形变。
- 振幅偏移量测工具
主从像对的数据偏移量是以像素的个数来计算的,用振幅(强度)数据来计算地表的形变信息,可用于快速、不连贯形变事件的量测。提供完整的振幅偏移量测工具, 包括:振幅偏移计算、偏移优化和重去平、偏移量转形变和地理编码。
- 相干RGB假彩色合成工具
相干RGB假彩色合成技术是对输入的一对slc像对做一系列处理,如多视、配准、地理编码、相干性计算和地理编码等,将这些成功进行RGB假彩色合成,凸显地物在不同特征图像上的表现,有助于地物的解译或现象的解释。
- 相干变化检测工具
相干变化检测工具通过计算两幅SAR图像的相干系数,根据相干性大小判定对应像素是否发生变化,相干系数越小,表示发生变化,相干系数接近1,表示地物稳定,未发生变化。可应用于地震、洪水评估、地质探测军事侦察等。
2.3实用工具
提供众多的实用工具,包括制图转换、数据统计、彩色合成、生成地面控制点文件、生成TIFF文件、图像修改、PRF校正、质量分析等。
SARscape还为InSAR处理提供众多实用工具,包括:
- 基线估算
- 多基线估算
- 大气位相延迟修正
- 复数据多视
- 干涉数据配准
- 干涉差分处理
- 地形/椭球体去平
- 残余相位去除
- 相位编辑
- 合成升轨/降轨形变结果
2.4形变建模工具
提供形变建模的工具,可以根据输入的参数进行形变模型的构建和模拟出形变的量和断裂带。形变建模工具是利用大地测量数据进行建模,从而描绘造成地壳位移常见来源(如地壳板块运动、火山喷发等)的特征。构建模型的目的是用分析解法重现所观察的信号。也可以使用非线性或线性反演算法完成逆反演。
2 其他模块功能介绍
3.1聚焦扩展模块
SARscape的聚焦模块,可以对RAW数据中每个点的反射率利用经过优化的调焦算法实现数据快速聚焦处理,直接输出SLC数据,并支持聚焦前对RAW数据的镶嵌。
聚焦模块支持的传感器数据类型:
ERS-1/2 SAR
JERS-1 SAR
ENVISAT ASAR Image Mode
ENVISAT ASAR Alternating Polarization
ENVISAT ASAR Wide Swath
ENVISAT ASAR IM mode data
ALOS PALSAR-1 Single Polarization
ALOS PALSAR-1 Dual Polarization
ALOS PALSAR-1 Full Polarization
Sentinel-1 IW
此外,支持自定义雷达系统的聚集处理,可以根据规范的元数据格式,对其他RAW格式的雷达数据进行聚焦。
3.2Gamma/Gaussian滤波扩展模块
斑点噪声是SAR成像系统的一大特色,源自基本分辨单元内地物的随机散射,在图像上表现为信号相关(如在空间上相关)的小斑点,它既降低了图像画面质量,又严重影响图像的自动分割、分类、目标检测以及其它定量专题信息的提取 。
SARscape提供基于Gamma/Gaussian 分布式模型的滤波核,能够最大程度地去除噪声,同时保留雷达图像的纹理属性和空间分辨率信息。
由PRIVAEERS N.V.研发的Gamma分布式模型算法是迄今最合适的方法,包括处理SLC数据的独立复杂高斯斑点模型和处理多视强度数据的伽马斑点模型。
3.3扫描式干涉雷达处理扩展模块
ScanSAR是一种具有天线扫描功能的SAR工作模式,在该模式下,系统利用突发模式(Burst mode )技术来获得宽的距离向测绘带,但同时也带来了其方位向几何分辨率的损失,具有数据量巨大和回波信号不连续的特点。
SARscape提供ScanSAR模式处理支持,同时与干涉处理模块结合,可用于处理生成大范围的干涉图像、相干图像、地面断层图。该模块支持:
- 二过干涉处理生成DEM和相关产品
- N过差分干涉生成地表形变制图和相关产品
支持ENVISAT ASAR ScanSAR模式、PALSAR-2 ScanSAR全孔径slc数据、Terrasar ScanSAR模式的干涉处理。
3.4极化雷达处理扩展模块
对极化SAR和极化SAR干涉处理。对极化SAR处理功能包括:测定偏振矩阵、偏振信号、偏振合成、偏振特征、Pauli分解、Entropy-Anisotropy-Alfa分解、Entropy-Anisotropy-Alfa分类;极化SAR干涉处理包括:SLC数据的几何校正、极化相位差和干涉图生成、极化/干涉相干性、相干性优化。
- 极化功能:
- 极化定标矩阵:用默认或自定义的极化定标参数精确估计目标散射矩阵
- 极化信号:从线性极化数据集,创建任意极化正交基准的散射矩阵
- 极化分解:提供相干(Pauli分解)和非相干(熵-α-各向异性特征分解)的方法来做散射矩阵的分解,前者用于一致的目标特征,后者用于分散式的目标特征。提供双极化熵各向异性分解,用于双极化slc数据集的相干矩阵的特征分解。
- 极化分类:在熵-α-各向异性特征分解之后的基础上,利用非监督分类法来对不同的散射特性进行分类
- 极化特征:提供了对交叉极化强度数据进行组合的方法,可用于进一步解译或分类
- 极化干涉功能:
- SLC数据配准:主从影像的配准及在距离向的重采样
- 相位合成:相组分生成,包含几何(常相位)和平地或已知地形(有DEM的情况)
- 相干性优化:代表主要散射机制的干涉图和相干数据的生成
- 极化相位差/干涉图生成:可生成1)两个相同获得方式的不同极化数据的极化相位差;2)两个不同获得方式的相同极化方式的“经典”干涉
- 合成平地相位:用相同相对的不同极化合成相位进行干涉去平
- 极化相干性:相干数据的极化相位差或单极化干涉的生成
3.5干涉叠加扩展模块
干涉叠加技术是挖掘时间序列SAR图像可以识别区域(像素)范围内,一定时间内地面位移表现在信号相关和一致性,获取mm级的形变信息。SARscape提供三个应用工具:
- PS (Persistent Scatterers,永久散射体)
进行点目标的分析,得到表现为高的相干性的局部散射体的形变信息和精确的高程信息,输入图像的数量对最后要进行PS鉴定的像元相干性的估算非常重要,如果输入图像的数量不足的话,在整个处理过程中,整个区域会有大量的高相干性目标和很多“假形变”信息,一般来说,输入影像的数量应该大于20幅,为保证正确的相干性和PS鉴定结果。
该方法基于对确定的“相干雷达反射信号”(永久散射体)的若干处理。着重分析这些确定的每个目标对象(图像上的某个像素)的相位历史,而不是传统的对整个输入图像的处理。
在SARscape软件中,PS操作主要分为五个步骤,另外还有一个可选步骤,即定义处理子区:
(1) 连接图生成
选择一个超级主影像,根据设定的基线阈值对所有图像建立主-从关系,所有的数据都将配准到一个主图像,这个主图像可自动分配也可以用户自己选择。
(2) 干涉工作流
这一步是根据像对的连接关系,对每一对像对进行干涉工作流处理。所有图像都要配准和重采样到参考文件,这涉及到4个因素(至少2个)的过采样,避免在大基线的情况下干涉条纹过密而混淆。不同于标准的InSAR处理,因为PS方法是找点目标,所以不进行光谱移动和普通的多普勒带宽滤波。会生成每个从影像和参考主影像的干涉图。
(3) PS反演Step1
第一次生成的形变结果,包括速率和高程改正值,这个结果没有去除大气影响的相位。
(4) PS第二次反演Step2
使用大气校正步骤,生成最终的形变结果。
(5) 地理编码
所有PS相关结果(形变速率、高度残差、形变序列、KML、矢量文件等)投影到地图系统中。
- SBAS (Small Baselines,短基线)
进行离散点目标分析,得到的结果和干涉模块类似,不同的是它是针对大区域的多景SAR做的,而不是双过(最多四过)干涉。和PS比起来,SBAS技术对输入图像的个数不是非常敏感,因为用的是离散分布的相干目标而不是一个像元,而且在SBAS中,会进行一些空间位移相关性的假设。不过,图像个数越多,得到的结果越好(甚至大气组分的干涉位相都能被很好的估算和去除)。输入的数据数量至少是5幅。包括以下5个步骤:
(1) 连接图
该功能定义了SAR相对组合和连接网络,用来生成多个差分干涉。对所有图像建立对应关系,看每对主从影像的基线是否在阈值内,将所有的数据都配准到一个主图像,这个主图像可自动分配也可用户自己选择。提供了最大最小基线、是否仅正向配对、冗余量、允许分离的部分等几个设置选项,来进行图像匹配。
(2) 干涉生成到相位解缠
生成去平和滤波后的干涉图、相干系数图、相位解缠结果SBAS反算
(3) 轨道精炼和重去平
对所有的像对进行轨道精炼和重去平,GCP的范围要覆盖在所有干涉像对上。
(4) SBAS反演第一步
SBAS反演的核心步骤,第一次估计位移速率和残余地形,用来对合成的干涉图进行去平,重新做相位解缠和精炼,生成更优化的结果,用于下一步计算。基于模型计算出所有像对的形变(日期、速度、加速度和加速度变化)和高程(校正值和新的DEM),提供无位移模型、线性模型、二次方模型、三次方模型四个模型。
(5) SBAS反演第二步
计算时间序列上的位移,在第一步得到的形变速率(_disp_first)基础上,进行定制的大气滤波,从而估算和去除大气相位,得到更加纯净的时间序列上的最终位移结果。提供大气高通、大气低通两个选项,对大气影响进行估计,最后每个时间都从测量的位移中减去这些大气部分。
(6) 地理编码和栅格转矢量
将所有的结果都编码到所选择的坐标系下,形变结果可以重新定义投影,如果要做下一步栅格矢量转换,比如要对数据做地理编码。
将栅格结果转为矢量的shape和kml文件。输出的数据是shape格式的矢量文件和kml文件,包含:斜距方向的位移速率、每个数据和最早时间的图像的位移、所有的时间序列的图像得到的总的综合位移、多时相的相干性、使用干涉测量做的像素制图和高程DEM、输入DEM的高程纠正。以及以不同颜色标识的位移信息,正值(蓝色):位移方向是往传感器的方向;负值(红色):位移方向是远离传感器的方向
- 层析SAR(Continuous Tomography)分析
一套完整的工具来处理连续层析成像数据,该技术提供了高程切片,该技术可以利用一系列的干涉图像沿SAR高程方向增强了分辨率。可以得到地物的高度和形变信息。
- 实用工具
- SBAS连接图编辑工具:该功能可以对连接图步骤生成的SAR像对组合和连接网络进行编辑。
- PS连接图编辑工具:可加入新的数据参与到PS处理中,加入新的数据时,只对新增的数据进行干涉工作流处理,节省时间。
- 连接图查看器:查看生成的连接图。
- PS分析工具:图形表示每个永久散射体位移记录。
- 时间序列分析:图形表示用SBAS方法提取的形变信息。

《SARscape雷达图像处理软件》共享方法如下:
(1)人员,限定为关注小编的用户。
(2)各类项目(包括各类科研项目)申请本数据扔享受免费政策,但需向本号捐赠一定数量的硬盘才能获取。
(3)捐赠硬盘可免留言获取数据。
相关文章:
SARscape雷达图像处理软件简介
合成孔径雷达(SAR)拥有独特的技术魅力和优势,渐成为国际上的研究热点之一,其应用领域越来越广泛。SAR数据可以全天候对研究区域进行量测、分析以及获取目标信息。高级雷达图像处理工具SARscape,能让您轻松将原始SAR数据…...
开源博客项目Blog .NET Core源码学习(23:App.Hosting项目结构分析-11)
本文学习并分析App.Hosting项目中后台管理页面的标签管理页面、轮播图维护页面。 标签管理页面 标签管理页面用于显示、检索、新建、编辑、删除标签数据,以便在前台页面的首页及文章专栏等页面显示标签数据。标签管理页面附带一新建及编辑页面,以支撑新…...

一.ffmpeg 将内存中的H264跟PCM 数据流合成多媒体文件
在有一些嵌入式平台中,H264数据流一般来自芯片内部的硬编码器, AAC音频数据则是通过采集PCM进行软编码,但是如何对它实时进行封装多媒体文件 ,参考ffmpeg example,花了一些时间终于实现了该功能。 流程图如下…...
C++ (week5):Linux系统编程3:线程
文章目录 三、线程1.线程的基本概念①线程相关概念②我的理解 2.线程的基本操作 (API)(1)获取线程的标识:pthread_self(2)创建线程:pthread_create()(3)终止线程①pthread_exit():当前线程终止,子线程主动退出②pthread_cancel()&…...
二叉树习题精讲-相同的树
相同的树 100. 相同的树 - 力扣(LeetCode)https://leetcode.cn/problems/same-tree/description/ /*** Definition for a binary tree node.* struct TreeNode {* int val;* struct TreeNode *left;* struct TreeNode *right;* };*/ bool i…...

「架构」模型驱动架构设计方法及其运用
本文通过一个实际的软件项目案例,深入探讨了模型驱动架构(MDA)在软件开发全过程中的应用。MDA是一种以模型为中心的设计方法,它通过分离计算、数据和业务逻辑,提高了软件的可维护性、可扩展性和可移植性。文章将从需求分析、架构设计、实现与测试三个阶段出发,分析MDA的应…...

基于 React + Nest 全栈开发的后台系统
Xmw Admin 基于 React Nest 全栈开发的后台系统 🪴 项目简介 🎯 前端技术栈: React、Ant Design、Umi、TypeScript🎯 后端技术栈: Nest.js、Sequelize、Redis、Mysql😝 线上预览: https://r…...
)
jQuery值操作例子 (代码)
直接上代码 <!DOCTYPE html> <html><head></head><body><div id"x1">例子</div><script src"js/jquery-3.7.1.min.js"></script><script>console.log($("#x1").text()) // 在浏览…...

Next-Admin,一款基于Nextjs开发的开箱即用的中后台管理系统(全剧终)
hello,大家好,我是徐小夕。之前和大家分享了很多可视化,零代码和前端工程化的最佳实践,今天继续分享一下最近开源的 Next-Admin 项目的最新更新。 这次更新是1.0版本最后一次更新,也根据用户反馈的问题做了一些优化&am…...

HTML5 文件处理及应用
HTML5 文件处理及应用 目录 核心对象文件信息读取文件拖放FileReaderSyncFileWriter APIBlob URL与 revokeObjectURL()跨源资源共享 (CORS)HTML5文件File API为浏览器提供了与用户计算机上的文件进行交互的能力,使得Web应用程序能够在客户端直接处理文件数据,而无需依赖服务…...

逻辑分析仪的调试使用
调试软件下载:点击跳转 一、接线 逻辑分析仪 设备 GND --- GND CHX(数据通道) --- 通信引脚 二、数据采集 图中两个可以选择数字大小的地方分别表示 采样深度 (10M Samples&a…...

AI学习指南数学工具篇-Python中的凸优化库
AI学习指南数学工具篇-Python中的凸优化库 在人工智能和机器学习领域,凸优化是一个非常重要的数学工具。它可以帮助我们解决各种问题,包括线性规划、二次规划、半定规划等。而在Python中,有一个非常优秀的凸优化库,即CVXPY。本文…...

数据库mysql
一、mysql常用语句 登录MySQLmysql -u root -p列出所有数据库SHOW DATABASES;创建一个新数据库CREATE DATABASE test;删除一个数据库DROP DATABASE test;对一个数据库进行操作时USE test;列出当前数据库的所有表SHOW TABLES;要查看一个表的结构DESC students;创建表CREATE TAB…...

AWS联网和内容分发之Transit Gateway
将Amazon VPC、AWS账户和本地网络连接到一个网关中。AWS Transit Gateway通过中央枢纽连接Amazon虚拟私有云(VPC)和本地网络。此连接简化了您的网络,并且结束了复杂的对等关系。Transit Gateway充当高度可扩展的云路由器,每个新的…...

牛客NC236 最大差值【simple 动态规划 Java/Go/PHP】
题目 题目链接: https://www.nowcoder.com/practice/a01abbdc52ba4d5f8777fb5dae91b204 思路 不难看出该题可以使用动态规划的方式解题。 在循环数组的过程中,记录截止到当前位置-1的最小值, 然后用当前的值去计算最大的差值。Java代码 im…...

ORACLE 6节点组成的ACFS文件系统异常的分析思路
近期遇到多次6节点集群的ACFS文件系统环境异常问题;如24日中午12点附近出现ACFS文件系统访问异常,通过查看集群ALERT日志、CSSD进程日志及OSW监控软件的日志,可以发现OSW监控软件在11:55-12:40分时没有收集到虚拟机LINUX主机的监控数据&#…...

vscode当前分支有未提交的修改,但是暂时不想提交,想要切换到另一个分支该怎么办
当前分支有未提交的修改,但是暂时不想提交,想要切换到另一个分支该怎么办? 首先,可以将当前修改暂存起来,以便之后恢复 git stash 然后切换到目标分支,例如需求A所在分支 git checkout feat-a-jie 修改完A需求后,需要先切换回之前的分支,例如需求B所在分支 git checkout feat…...
前端API: IntersectionObserver的那一二三件事
IntersectionObserver 基础 IntersectionObserver 可以监听一个元素和可视区域相交部分的比例,然后在可视比例达到某个阈值的时候触发回调。比如可以用来处理图片的懒加载等等 首先我们来看下基本的格式: const observer new IntersectionObserver(c…...

C++迈向精通:vector复现与sort复现
vector复现 思考过程 对于vector考虑如下几点: 底层数据结构算法实现方式对外表现形式 这里底层的数据结构采用了顺序表,当然,原版STL中的vector也是采用的顺序表。 算法实现的方式放在代码中去设计 对外表现形式是数组,因此需…...

【头歌】计算机网络DHCP服务器配置第二关access口配置答案
头歌计算机网络DHCP服务器配置第二关access口配置操作步骤 任务描述 本关任务:创建 vlan ,并且将与 pc 机相连接口划分 vlan 。 操作要求 在第一关的拓扑图的基础上,配置交换机,具体要求如下: 1、在特权模式下进入 vla…...
)
告别手动传Token!用JMeter的JSON Extractor搞定接口自动化登录(附实战配置)
告别手动传Token!用JMeter的JSON Extractor实现无缝接口自动化登录 在接口测试的世界里,登录态管理就像一场永无止境的接力赛——每次请求都需要准确传递Token这个"接力棒"。传统的手工复制粘贴Token不仅效率低下,更是自动化测试流…...

生物医学英文文献去哪查?
想追踪领域前沿,国际数据库访问不稳定,找篇文献要翻三四个平台;想梳理本土研究进展,中文核心资源分散在不同库,检索起来浪费大半天;要做学科趋势分析,各种工具功能碎片化,导出数据还…...

vscode格式化插件
1、在vsocde里安装这个插件2、下载 clangllvm 适配 windows 链接地址:https://github.com/llvm/llvm-project/releases/tag/llvmorg-18.1.83、添加环境变量 将下载的安装报解压到 C:\Users\你的用户名\AppData\Local\Programs 复制C:\Users\你的用户名\AppData\Loca…...

Pwn题卡壳了?用LibcSearcher快速定位libc版本,附Python3安装与实战避坑指南
Pwn题卡壳了?用LibcSearcher快速定位libc版本,附Python3安装与实战避坑指南 在CTF竞赛和二进制安全研究中,Pwn题往往是最具挑战性的环节之一。当你在解题过程中成功泄露了某个libc函数的地址,却因为不知道目标系统的libc版本而无法…...

无王无帝定乾坤,来自田间第一人 道统传承兴万民
无王无帝定乾坤 来自田间第一人 华夏千载文脉绵延,万古道统源远流长,自古圣贤立心传道,只为正本清源、润泽苍生。往昔道统多依附王权存续,受朝堂礼制所拘,流传受限,难入寻常百姓之家,普惠世间之…...

从零到告警:用Prometheus+SNMP监控华为交换机,并配置Grafana看板与告警规则
从零构建华为交换机智能监控体系:PrometheusSNMP实战指南 当机房里的华为交换机突然宕机时,运维团队往往要面对业务部门的连环追问。传统的人工巡检方式就像用体温计量火山喷发——既滞后又无力。本文将手把手带您搭建从数据采集到告警响应的完整监控闭环…...

助睿平台-零代码实现订单利润数据分流加工
一.实验背景 1.1 实验目的 本次实验旨在熟悉助睿零代码数据集成平台(ETL平台)的核心功能和操作方法,具体包括: 掌握新建转换、添加组件、执行转换等基本操作流程 熟悉表输入、记录集连接、字段选择、过滤记录、Excel输出等常用…...

GD32C103RBT6 I2C 驱动全解析
一、I2C 通信基础概述 1. I2C 硬件接口 GD32C10x 提供 I2C0、I2C1 两组硬件 I2C: SCL:串行时钟线(由主机产生) SDA:串行数据线 需外接 上拉电阻(4.7kΩ 经典值) 支持 多主机、多从机 2. 通信模式 主机模式:MCU 主动发起通信(最常用) 从机模式:MCU 被其他主机访问 …...

【免费下载】 探索地理信息的无限可能:MATLAB Mapping Toolbox 自由之旅【matlab下载】
探索地理信息的无限可能:MATLAB Mapping Toolbox 自由之旅 在数字化时代的浪潮中,地理信息系统(GIS)已成为连接现实世界与数字世界的桥梁。今天,我们特别向您推荐一个开源宝藏——MATLAB Mapping Toolbox R2019b提取版…...

GoogleTest 使用指南 | 测试模板函数
GoogleTest 使用指南 | 测试模板函数GoogleTest 使用指南 | 测试模板函数GoogleTest 使用指南 | 测试模板函数 模板类和函数由于其泛型特性,需要在不同类型下进行测试,以确保其通用性和正确性。 下面是一个示例。 m…...