相对位姿估计
相对位姿估计
示意图
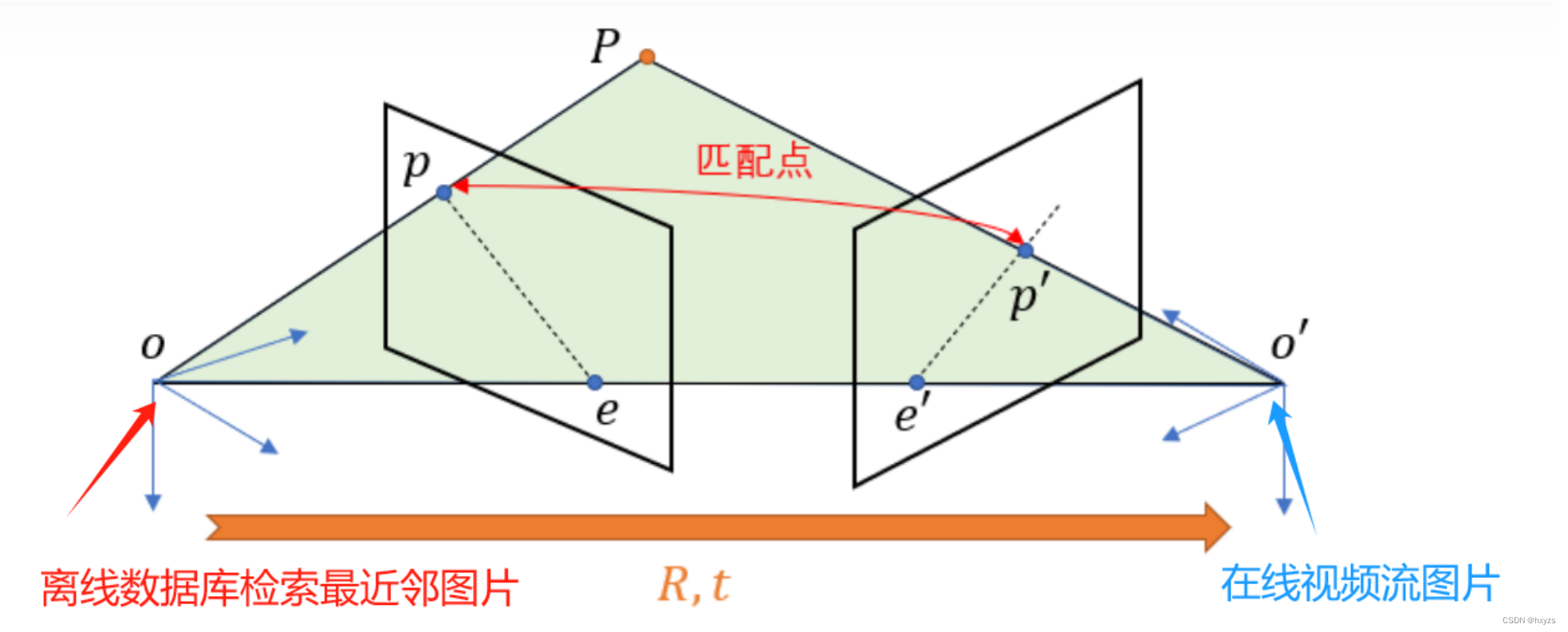
理论推导
离线数据库:
P的位置 P = [ X , Y , Z ] T P=[X,Y,Z]^{T} P=[X,Y,Z]T
相机内参 k 1 k_{1} k1
安卓手机:
相机内参 k 2 k_{2} k2
两个像素点位置 : p 1 和 p 2 p_1和p_2 p1和p2
公式一:
s 1 p 1 = K 1 P s_1p_1=K_1P s1p1=K1P s 2 p 2 = K 2 ( R P + t ) s_2p_2=K_2(RP+t) s2p2=K2(RP+t)
**公式二:**归一化平面上的坐标
x 1 = K 1 − 1 p 1 x_1=K_1^{-1}p_1 x1=K1−1p1 x 2 = K 2 − 1 p 2 x_2=K_2^{-1}p2 x2=K2−1p2
公式三:
x 2 = R x 1 + t x_2=Rx_1+t x2=Rx1+t
公式四:
t ^ x 2 = t ^ R x 1 \hat{t}x_2=\hat{t}Rx_1 t^x2=t^Rx1
公式五
x 2 T t ^ x 2 = x 2 T t ^ R x 1 x_2^{T}\hat{t}x_2=x_2^{T}\hat{t}Rx_1 x2Tt^x2=x2Tt^Rx1
x 2 T t ^ R x 1 = 0 x_2^{T}\hat{t}Rx_1=0 x2Tt^Rx1=0
公式六:
( K 2 − 1 p 2 ) T t ^ R K 1 − 1 p 1 (K_2^{-1}p_2)^{T}\hat{t}RK_1^{-1}p_1 (K2−1p2)Tt^RK1−1p1
结论:
本质矩阵: E = t ^ R E=\hat{t}R E=t^R ---------------------已知相机参数的情况下
基础矩阵: F = K 2 − T E K 1 − 1 F=K_2^{-T}EK_1^{-1} F=K2−TEK1−1 -----------未知相机参数的情况下
伪代码
input:image_src,k_src,image_dst,k_dst
output:R,t
1 feature_detect(image_src,image_dst)---->keypoints and deccriptors
2 feature_match(image_src,image_dst)---->matched_features
3 find_essentialmatrix(matched_keypoints,k_src,k_dst)----->essential_matrix
4 decompose_E(essentialmatrix)----->R,t
5 judge "left or right"
实现代码
import cv2
import numpy as npdef find_keypoints_and_descriptors(image):# 使用SIFT算法检测关键点和计算描述符sift = cv2.SIFT_create()keypoints, descriptors = sift.detectAndCompute(image, None)return keypoints, descriptorsdef match_keypoints(descriptors1, descriptors2):# 使用FLANN匹配器进行关键点匹配FLANN_INDEX_KDTREE = 0index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)search_params = dict(checks=50)flann = cv2.FlannBasedMatcher(index_params, search_params)matches = flann.knnMatch(descriptors1, descriptors2, k=2)# 保留良好的匹配good_matches = []for m, n in matches:if m.distance < 0.7 * n.distance:good_matches.append(m)return good_matchesdef estimate_relative_pose(keypoints1, keypoints2, good_matches, camera_matrix_src, camera_matrix_dst):# 提取匹配点对应的关键点src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)# 使用基础矩阵估计相机的相对位姿essential_matrix, _ = cv2.findEssentialMat(src_pts, dst_pts, camera_matrix_src, None, camera_matrix_dst, None, cv2.RANSAC, 0.999, 1.0)# 从基础矩阵中恢复旋转和平移矩阵_, R, t, _ = cv2.recoverPose(essential_matrix, src_pts, dst_pts, camera_matrix_src)return R, tdef determine_camera_direction(t, R):# 打印平移向量print(f"平移向量 t: {t}")# 计算旋转矩阵的欧拉角angles = cv2.Rodrigues(R)[0]yaw = np.arctan2(angles[1, 0], angles[0, 0]) * 180.0 / np.pi# 联合判断相机的方向if t[0] > 0 and yaw > 0:print("相机偏向右侧, 您应该向左转")elif t[0] < 0 and yaw < 0:print("相机偏向左侧,您应该向右转")elif t[0] > 0 and yaw < 0:print("相机偏向右侧, 但是角度偏向左")elif t[0] < 0 and yaw > 0:print("相机偏向左侧, 但是角度偏向右")else:print("相机方向正前方")print(f"X方向平移: {t[0]}, Y方向平移: {t[1]}, Z方向平移: {t[2]}")print(f"Yaw 角度: {yaw}")def main():# 加载两张图片image1 = cv2.imread('/media/k1928-3/028efb59-765e-462b-8aa6-085565fa80eb/hxy/biaoding/weiziguji/DJI_0273.JPG', cv2.IMREAD_GRAYSCALE)image2 = cv2.imread('/media/k1928-3/028efb59-765e-462b-8aa6-085565fa80eb/hxy/biaoding/weiziguji/phone/ori_right.jpg', cv2.IMREAD_GRAYSCALE)# 假设你已知相机内参----数据库相机fx_src = 4282.03fy_src = 2960.54cx_src = 844.20cy_src = 552.00camera_matrix_src = np.array([[fx_src, 0, cx_src],[0, fy_src, cy_src],[0, 0, 1]], dtype=float)# 手机相机fx_dst = 2934.52fy_dst = 2934.89cx_dst = 1466.29cy_dst = 2020.34camera_matrix_dst = np.array([[fx_dst, 0, cx_dst],[0, fy_dst, cy_dst],[0, 0, 1]], dtype=float)# 检测关键点和计算描述符keypoints1, descriptors1 = find_keypoints_and_descriptors(image1)keypoints2, descriptors2 = find_keypoints_and_descriptors(image2)# 匹配关键点good_matches = match_keypoints(descriptors1, descriptors2)# 估计相机的相对位姿R, t = estimate_relative_pose(keypoints1, keypoints2, good_matches, camera_matrix_src, camera_matrix_dst)# 联合判断相机的方向determine_camera_direction(t, R)if __name__ == "__main__":main()##八点法
import cv2
import numpy as np
import timedef find_keypoints_and_descriptors(image):# 使用SIFT算法检测关键点和计算描述符sift = cv2.SIFT_create()keypoints, descriptors = sift.detectAndCompute(image, None)return keypoints, descriptorsdef match_keypoints(descriptors1, descriptors2):# 使用FLANN匹配器进行关键点匹配FLANN_INDEX_KDTREE = 0index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)search_params = dict(checks=50)flann = cv2.FlannBasedMatcher(index_params, search_params)matches = flann.knnMatch(descriptors1, descriptors2, k=2)# 保留良好的匹配good_matches = []for m, n in matches:if m.distance < 0.7 * n.distance:good_matches.append(m)return good_matchesdef estimate_relative_pose_eight_point(keypoints1, keypoints2, good_matches, camera_matrix_src, camera_matrix_dst):# 提取匹配点对应的关键点src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)# 计算基础矩阵fundamental_matrix, _ = cv2.findFundamentalMat(src_pts, dst_pts, cv2.FM_8POINT)# 计算本质矩阵essential_matrix = camera_matrix_dst.T @ fundamental_matrix @ camera_matrix_src# 从本质矩阵中恢复旋转和平移矩阵_, R, t, _ = cv2.recoverPose(essential_matrix, src_pts, dst_pts, camera_matrix_src)return R, tdef determine_camera_direction(t, R):# 打印平移向量print(f"平移向量 t: {t}")# 计算旋转矩阵的欧拉角angles = cv2.Rodrigues(R)[0]yaw = np.arctan2(angles[1, 0], angles[0, 0]) * 180.0 / np.pi# 联合判断相机的方向if t[0] > 0 and yaw > 0:print("人在走廊中轴线左侧, 手机摄像头角度偏右,您应该向右走,应将手机向左偏")elif t[0] < 0 and yaw < 0:print("人在走廊中轴线右侧,手机摄像头角度偏左,您应该向左走,应将手机向右偏")elif t[0] > 0 and yaw < 0:print("人在走廊中轴线左侧, 手机摄像头角度偏左,您应该向右走,应将手机向右偏")elif t[0] < 0 and yaw > 0:print("人在走廊中轴线右侧,手机摄像头角度偏右,您应该向左走,应将手机向左偏")else:print("相机方向正前方")print(f"X方向平移: {t[0]}, Y方向平移: {t[1]}, Z方向平移: {t[2]}")print(f"Yaw 角度: {yaw}")def main():# 加载两张图片image1 = cv2.imread('/media/k1928-3/028efb59-765e-462b-8aa6-085565fa80eb/hxy/biaoding/weiziguji/DJI_0273.JPG', cv2.IMREAD_GRAYSCALE)image2 = cv2.imread('/media/k1928-3/028efb59-765e-462b-8aa6-085565fa80eb/hxy/biaoding/weiziguji/phone/ori_right.jpg', cv2.IMREAD_GRAYSCALE)# 假设你已知相机内参----数据库相机fx_src = 4282.03fy_src = 2960.54cx_src = 844.20cy_src = 552.00camera_matrix_src = np.array([[fx_src, 0, cx_src],[0, fy_src, cy_src],[0, 0, 1]], dtype=float)# 手机相机fx_dst = 2934.52fy_dst = 2934.89cx_dst = 1466.29cy_dst = 2020.34camera_matrix_dst = np.array([[fx_dst, 0, cx_dst],[0, fy_dst, cy_dst],[0, 0, 1]], dtype=float)# 检测关键点和计算描述符keypoints1, descriptors1 = find_keypoints_and_descriptors(image1)keypoints2, descriptors2 = find_keypoints_and_descriptors(image2)# 匹配关键点good_matches = match_keypoints(descriptors1, descriptors2)# 记录开始时间start_time = time.time()# 使用八点法估计相机的相对位姿R, t = estimate_relative_pose_eight_point(keypoints1, keypoints2, good_matches, camera_matrix_src, camera_matrix_dst)# 联合判断相机的方向determine_camera_direction(t, R)# 记录结束时间并计算总时间end_time = time.time()elapsed_time = (end_time - start_time) * 1000 # 转换为毫秒print(f"求解位姿总耗时:{elapsed_time:.6f} 毫秒")if __name__ == "__main__":main()注意:提取特征的时间是6s,特征匹配的时间是6秒,求解位姿的旋转和平移,所需要的时间不多
相关文章:
相对位姿估计
相对位姿估计 示意图 理论推导 离线数据库: P的位置 P [ X , Y , Z ] T P[X,Y,Z]^{T} P[X,Y,Z]T 相机内参 k 1 k_{1} k1 安卓手机: 相机内参 k 2 k_{2} k2 两个像素点位置 : p 1 和 p 2 p_1和p_2 p1和p2 公式一:…...
记一次 .NET某工业设计软件 崩溃分析
一:背景 1. 讲故事 前些天有位朋友找到我,说他的软件在客户那边不知道什么原因崩掉了,从windows事件日志看崩溃在 clr 里,让我能否帮忙定位下,dump 也抓到了,既然dump有了,接下来就上 windbg …...

2020 6.s081——Lab5:Lazy page allocation
再来是千年的千年 不变是眷恋的眷恋 飞越宇宙无极限 我们永不说再见 ——超兽武装 完整代码见:SnowLegend-star/6.s081 at lazy (github.com) Eliminate allocation from sbrk() (easy) 顾名思义,就是去掉sbrk()中调用growproc()的部分。1s完事儿。 Laz…...
华为认证学习笔记:生成树
以太网交换网络中为了进行链路备份,提高网络可靠性,通常会使用冗余链路。但是使用冗余链路会在交换网络上产生环路,引发广播风暴以及MAC地址表不稳定等故障现象,从而导致用户通信质量较差,甚至通信中断。为解决交换网络…...

leetcode 97.交错字符串
思路:LCS 其实也是同一个类型的题目,一般涉及到这种子序列的字符串问题的时候,状态的设置基本上都应该是以...结尾为状态的。这里同样,设置用dp[i][j]为s1,s2字符以i,j结尾能否拼接成s3[ij]。 那么,首先就…...
)
The Missing Semester ( Shell 工具和脚本 和 Vim)
管道符号 (1)管道符号 | 将前一个命令的输出作为下一个命令的输入 例如: 以下为 ./semester输出中提取包含 "Last-Modified" 的行并写入文件 last-modified.txt./semester | grep "Last-Modified" > ~/last-modif…...
【Uniapp微信小程序】自定义水印相机、微信小程序地点打卡相机
效果图 template 下方的image图片自行寻找替换! <template><view><camerav-if"!tempImagePath && cameraHeight ! 0":resolution"high":frame-size"large":device-position"device":flash"f…...

SimPO: Simple Preference Optimization with a Reference-Free Reward
https://github.com/princeton-nlp/SimPO 简单代码 class simpo(paddle.nn.Layer):def __init__(self):super(OrPoLoss, self).__init__()self.loss paddle.nn.CrossEntropyLoss()def forward(self,neg_logit, neg_lab, pos_logit, pos_lab,beta,gamma):neg_logit paddle.n…...
CDH6.3.2安装文档
前置环境: 操作系统: CentOS Linux release 7.7 java JDK : 1.8.0_231 1、准备工作 准备以下安装包: Cloudera Manager: cloudera-manager-agent-6.3.1-1466458.el7.x86_64.rpm cloudera-manager-daemons-6.3.1-1466458.el…...

Java实战入门:深入解析Java中的 `Arrays.sort()` 方法
文章目录 一、方法定义参数说明返回值 二、使用场景三、实现原理四、示例代码示例一:对整型数组排序示例二:对字符串数组排序示例三:对自定义对象数组排序 五、注意事项六、总结 在Java编程中,Arrays.sort() 方法是一个非常常用的…...

JavaScript的垃圾回收机制
No.内容链接1Openlayers 【入门教程】 - 【源代码示例300】 2Leaflet 【入门教程】 - 【源代码图文示例 150】 3Cesium 【入门教程】 - 【源代码图文示例200】 4MapboxGL【入门教程】 - 【源代码图文示例150】 5前端就业宝典 【面试题详细答案 1000】 文章目录 一、垃圾…...

小程序使用Canvas设置文字竖向排列
在需要使用的js页面引入js文件,传入对应参数即可 /** * 文本竖向排列 */ function drawTextVertical(context, text, x, y) {var arrText text.split();var arrWidth arrText.map(function (letter) {return 26; // 字体间距,需要自定义可以自己加参数,根据传入参数进行…...

GPT-4o:重塑人机交互的未来
一个愿意伫立在巨人肩膀上的农民...... 一、推出 在人工智能(AI)领域,自然语言处理(NLP)技术一直被视为连接人类与机器的桥梁。近年来,随着深度学习技术的快速发展,NLP领域迎来了前所未有的变革…...
大语言模型拆解——Tokenizer
1. 认识Tokenizer 1.1 为什么要有tokenizer? 计算机是无法理解人类语言的,它只会进行0和1的二进制计算。但是呢,大语言模型就是通过二进制计算,让你感觉计算机理解了人类语言。 举个例子:单1,双2&#x…...
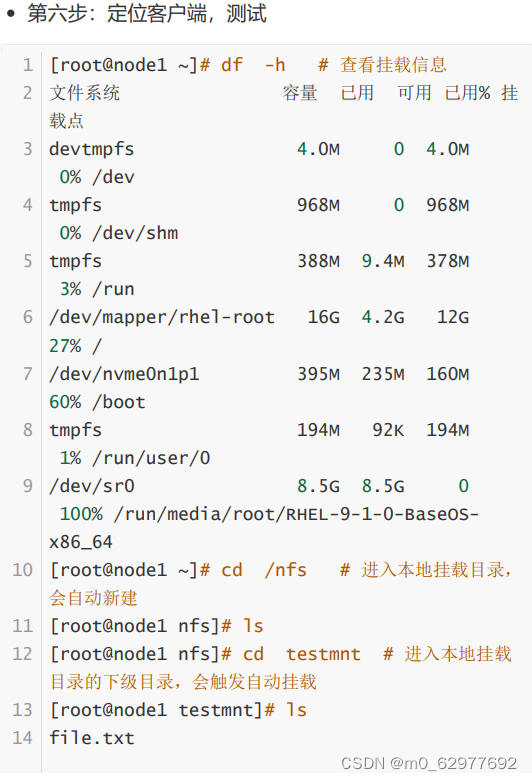
Linux自动挂载服务autofs讲解
1.产生原因 2.配置文件讲解 总结:配置客户端,先构思好要挂载的目录如:/abc/cb 然后在autofs.master中编辑: /abc(要挂载的主目录) /etc/qwe(在这个文件里去找要挂载的副目录,这个名…...

堆结构知识点复习——玩转堆结构
前言:堆算是一种相对简单的数据结构, 本篇文章将详细的讲解堆中的知识点, 包括那些我们第一次学习堆的时候容易忽略的内容, 本篇文章会作为重点详细提到。 本篇内容适合已经学完C语言数组和函数部分的友友们观看。 目录 什么是堆 建堆算法…...

JS数据类型运算符标准库
目录 数据类型运算符标准库对象Object对象属性描述对象Array对象包装对象Boolean对象Number对象String对象Math对象Date对象...

单片机之从C语言基础到专家编程 - 4 C语言基础 - 4.13数组
C语言中,有一类数据结构,它可以存储一组相同类型的元素,并且可以通过索引访问这些元素,没错,这类数据结构就是数组。数组可以说是C语言中非常重要的数据结构之一了。使用数组可以是程序逻辑更加清晰,也更加…...
【码银送书第二十期】《游戏运营与出海实战:策略、方法与技巧》
市面上的游戏品种繁杂,琳琅满目,它们是如何在历史的长河中逐步演变成今天的模式的呢?接下来,我们先回顾游戏的发展史,然后按照时间轴来叙述游戏运营的兴起。 作者:艾小米 本文经机械工业出版社授权转载&a…...
String 类
目录: 一. 认识 String 类 二. String 类的基本用法 三. String对象的比较 四.字符串的不可变性 五. 认识 StringBuffer 和 StringBuilder 一. 认识 String 类: 在C语言中已经涉及到字符串了,但是在C语言中要表示字符串只能使用字符数组或者…...

AI 术语通俗词典:人工神经元
人工神经元是深度学习、神经网络和人工智能中非常基础的一个术语。它用来描述神经网络中最基本的数学计算单元。换句话说,人工神经元是在回答:模型怎样把多个输入信号加权合并,并转换成一个新的输出信号。如果说神经网络是一套由许多层组成的…...

零代码构建离线环境数据记录器:基于WipperSnapper与BME280的实践指南
1. 项目概述:告别代码,用离线数据记录器抓住每一刻环境数据如果你曾经想搭建一个能默默在角落记录温度、湿度或气压的小设备,但又觉得写代码、调试硬件太麻烦,那今天这个项目就是为你准备的。数据记录,听起来很专业&am…...

终极Windows虚拟手柄驱动配置指南:5步快速上手ViGEmBus
终极Windows虚拟手柄驱动配置指南:5步快速上手ViGEmBus 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 想在Windows系统中轻松实现游戏控制器模拟…...

保障企业级应用安全,如何利用 Taotoken 管理 API 密钥与审计日志
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 保障企业级应用安全,如何利用 Taotoken 管理 API 密钥与审计日志 在中大型企业的开发实践中,将大模型能力集…...
)
别再乱装CUDA了!用Anaconda为你的3060 Ti一键搞定PyTorch GPU环境(含CUDA 11.3实战)
3060 Ti显卡玩家的PyTorch环境配置指南:用Anaconda避开CUDA版本地狱 在深度学习领域,GPU加速已经成为提升模型训练效率的标配。然而,对于许多刚入门的开发者来说,配置PyTorch的GPU支持往往成为第一道门槛——尤其是当涉及到CUDA版…...

深度解析:Performance-Fish如何通过四级缓存架构实现《环世界》400%性能优化
深度解析:Performance-Fish如何通过四级缓存架构实现《环世界》400%性能优化 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish Performance-Fish是《环世界》(Rim…...

英雄联盟智能助手Seraphine:告别手动查询,实现高效游戏决策自动化
英雄联盟智能助手Seraphine:告别手动查询,实现高效游戏决策自动化 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 在英雄联盟排位赛中,你是否曾因错过接受对局而懊恼不已&a…...

量子控制中的动态校正门与SCQC几何方法
1. 量子控制中的噪声挑战与动态校正门在超导量子处理器上实现高保真度的量子门操作,最大的障碍来自环境噪声。这些噪声主要分为两类:失谐噪声(δz)和幅度噪声(ϵ)。失谐噪声源于量子比特频率的漂移…...

【最新 v2.7.1 版本安装包】OpenClaw 零基础无痛部署,无需命令零代码保姆级快速上手
OpenClaw(小龙虾)Windows 一键部署保姆级教程 | 10 分钟搭建专属数字员工【点击下载最新OpenClaw安装包】 前言 2026 年开源圈热门 AI 智能体 OpenClaw(昵称小龙虾),GitHub 星标突破 28 万,凭借本地运行 …...

基于RP2040的客制化宏键盘:从硬件设计到KMK固件开发全攻略
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫clawdpad,作者是kudretyilmazz。乍一看这个名字,可能有点摸不着头脑,但如果你对机械键盘、客制化输入设备或者桌面自动化感兴趣,那这个项目绝对值得你花时间…...