USART串口外设
USART介绍
-
USART:另外我们经常还会遇到串口,叫UART,少了个S,就是通用异步收发器,一般我们串口很少使用这个同步功能,所以USART和UART使用起来,也没有什么区别。
其实这个STM32的USART同步模式,只是多了个时钟输出而已,它只支持时钟输出,不支持时钟输入,所以这个同步模式更多的是为了,兼容别的协议或者特殊用途而设计的,并不支持两个USART之间进行同步通信。所以我们学习串口,主要还是异步通信。 -
串口的协议,串口主要就是靠收发这样的、约定好的波形来进行通信的,那这个USART外设,就是串口通信的硬件支持电路。
USART分为发送和接收两部分,发送是将数据寄存器的一个字节数据,自动生成协议规定的波形,从TX引脚发送出去。接收是自动接收RX引脚的波形,按照协议规定,解码为一个字节数据,存放在数据寄存器里,这就是USART电路功能。 -
波特率发生器,就是用来配置波特率的,其实是一个分频器,比如我们APB2总线给个72MHZ的频率,然后波特器进行一个分频,得到我们想要的波特率时钟,最后在这个时钟下,进行收发,就是我们指定的通信波特率。
-
停止位长度,在进行连续发送时,停止长度决定了帧的间隔,最常用的是1位停止位。
-
同步模式,就是多了个时钟CLK的输出;硬件流控制,比如A设备的TX脚向B设备的RX脚发送数据,A设备一直在发,发的太快了,B处理不过来,如果没有硬件流控制,那B就只能抛弃新数据或者覆盖原数据了。如果有硬件流控制,在硬件电路上,会多出一根线,如果B没准备好接收,就置高电平,如果准备好了,就置低电平。A接收到了B反馈的准备信号,就只会在B准备好的时候,才发数据,如果B没准备好,那数据就不会发送出去,这就是硬件流控制,可以防止因为B处理慢而导致数据丢失的问题。
-
DMA,是这个串口支持DMA进行数据转运,可以使用DMA转运数据,减轻CPU的负担。
-
最后,智能卡、IrDA(用于红外通信的)、LIN(局域网通信协议),这些是其他的一些协议。因为这些协议和串口是非常的像,所以STM32就对USART加了一些小改动,就能兼容这么多协议了,不过我们一般不用。
-
USART1是APB2总线上的设备,USART2、 USART3是APB1总线上的设备。
USART框图
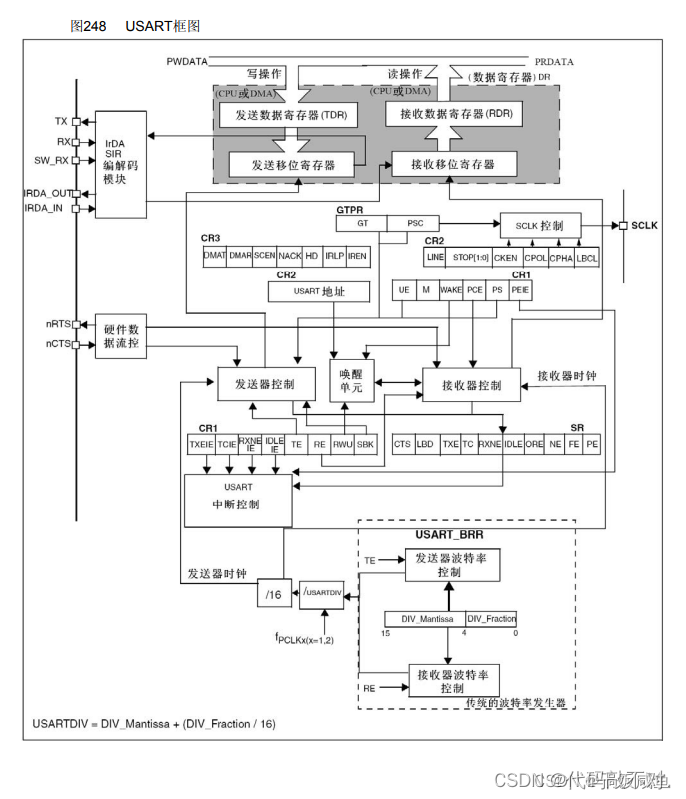
引脚部分
TX: 发送数据输出引脚。
RX: 接收数据输入引脚。
SCLK: 发送器时钟输出引脚。这个引脚仅适用于同步模式。
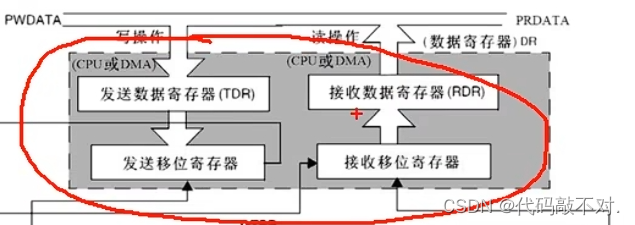
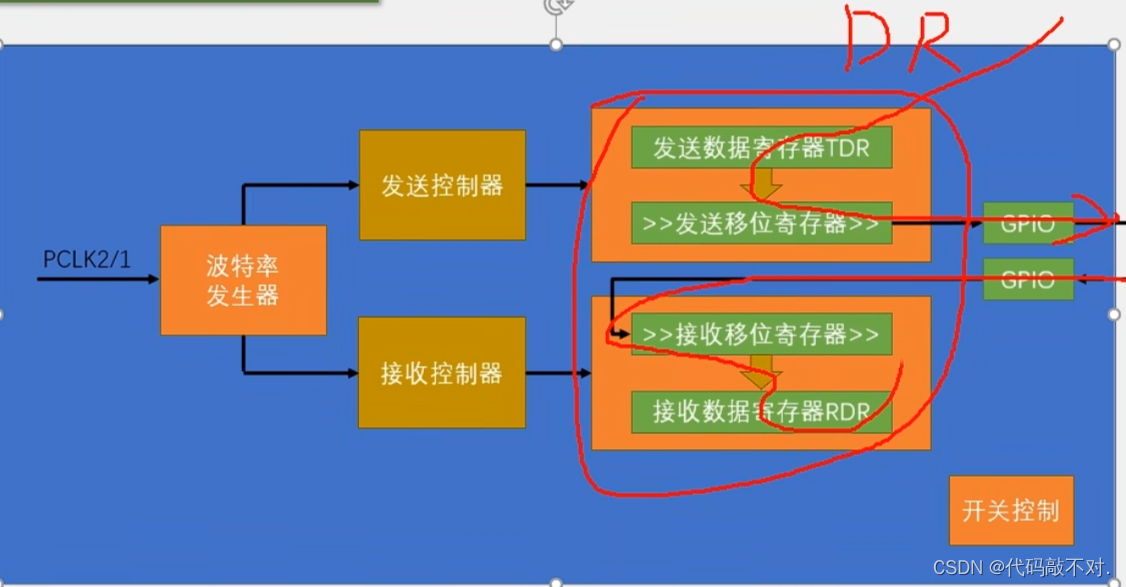
USART_DR包含了已发送的数据或者接收到的数据。USART_DR实际是包含了两个寄存器,一个专门用于发送的可写TDR, 一个专门用于接收的可读RDR。
这两个寄存器占用同一个地址在程序上,只表现为一个寄存器。当进行发送操作时,往USART_DR写入数据会自动存储在TDR内;当进行读取操作时,向USART_DR读取数据会自动提取RDR数据。TDR和RDR都是介于系统总线和移位寄存器之间。串行通信是一个位一个位传输的,发送时把TDR内容转移到发送移位寄存器, 然后把移位寄存器数据每一位发送出去,接收时把接收到的每一位顺序保存在接收移位寄存器内然后才转移到RDR。
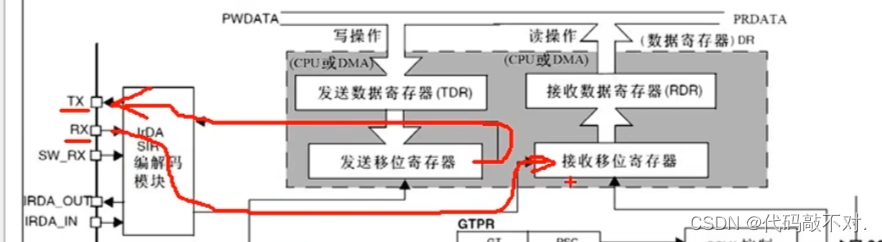
面是两个移位寄存器,一个用于发送,一个用于接收。发送移位寄存器的作用就是,把一个字节的数据一位一位地移出去,正好对应串口协议的波形的数据位。这两个寄存器是怎么工作的呢?
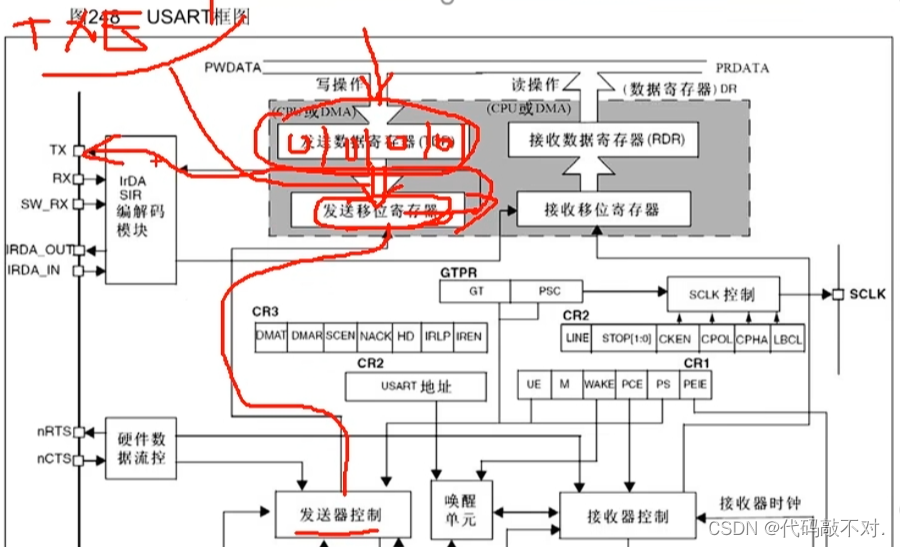
比如你在某时刻给TDR写入了0x55这个数据,在寄存器里就是二进制存储,0101 0101, 那么此时,硬件检测到你写入数据了,它就会检查当前移位寄存器不是有数据正在移位。
如果没有,这个0101 0101就会立刻全部移动到寄存器,准备发送,当数据从TDR移动到移位寄存器时,会置一个标志位,叫TXE (TX Empty),发送寄存器空,我们检查这个标志位,如果置1了,我们就可以在TDR写入下一个数据了。
注意一下,当TXE标志位置1时,数据其实还没有发送出去,只要数据从TDR转移到发送移位寄存器了,TXE就会置1,我们就可以写入新的数据了。
然后发送移位寄存器就会在下面这里的发生器控制的驱动下,向右移位,然后一位一位地,把数据输出到TX引脚。这里是向右移位的,所以正好和串口协议规定的低位先行,是一致的,当数据移位完成后,新的数据就会再次自动地从TDR转移到发送移位去存器里来, 如果当前移位奇存器移位还没有完成,TDR的数据就会选行等待,但移位完成,就会立刻转移过来,有了TDR和移位寄存器的双重缓存,可以保证连续发送数据的时候,数据帧之间不会有空闲,提高了工作效率。
简单来说,就是数据一旦从TDR转移到移位寄存器了,管你有没有移位完成,就立刻把下一个数据放在TDR等着,一旦移完了,新的数据就会立刻跟上。
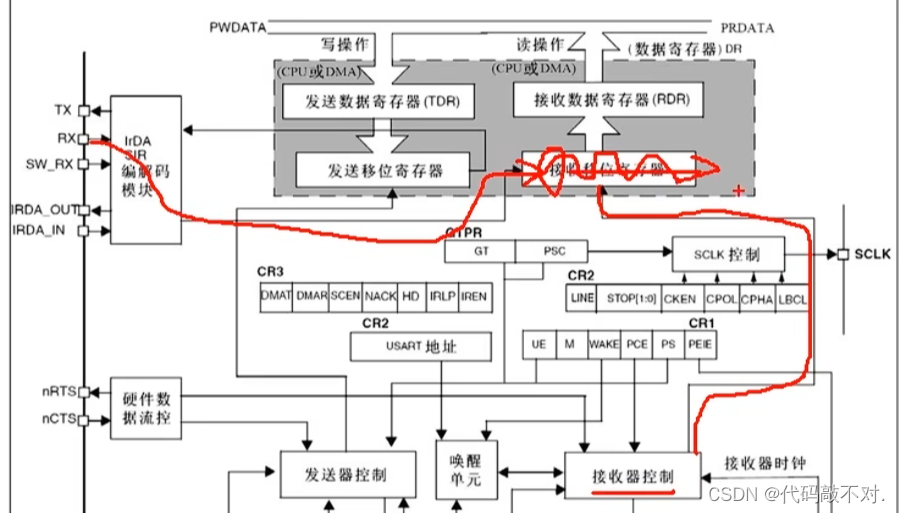
然后接收端,也是类似的。数据从RX引脚通向接收移位寄存器,在接收器控制的驱动下,一位一位地读取RX电平,先放在最高位,然后向右移,移位8次之后,就能接收一个字节了。 同样,因为串口协议规定是低位先行,所以接收移位寄存器是从高位往低位这个方向移动的。
之后,当一个字节移位完成之后,这一个字节的数据就会整体地,一下子转移到接收数据寄存器RDR里来,在转移的过程中,也会置一个标志位叫RXNE (RXNot Empty),接收数据寄存器非空,当我们检测到RXNE置1之后,就可以把数据读走了。同样,这里也是两个寄存器进行缓存,当数据从移位寄存器转移到RDR时,就可以直接移位接收下一帧数据了。这就是USART外设整个的工作流程。
控制部分和其他增强部分
下面这里是发送器控制,它就是用来控制发送移位寄存器的工作的;接收器控制,用来控制接收移位寄存器的工作;然后左边这里,有一个硬件数据流控,也就是硬件流控制,简称流控。
这里流控有两个引脚,一个是nRTS,一个是nCTS。nRTS(Request To Send)是请求发送,是输出脚,也就是告诉别人,我当前能不能接收;nCTS (Clear To Send)是清除发送,是输入脚,也就是用于接收别人nRTS的信号的。这里前面加个n意思是低电平有效。
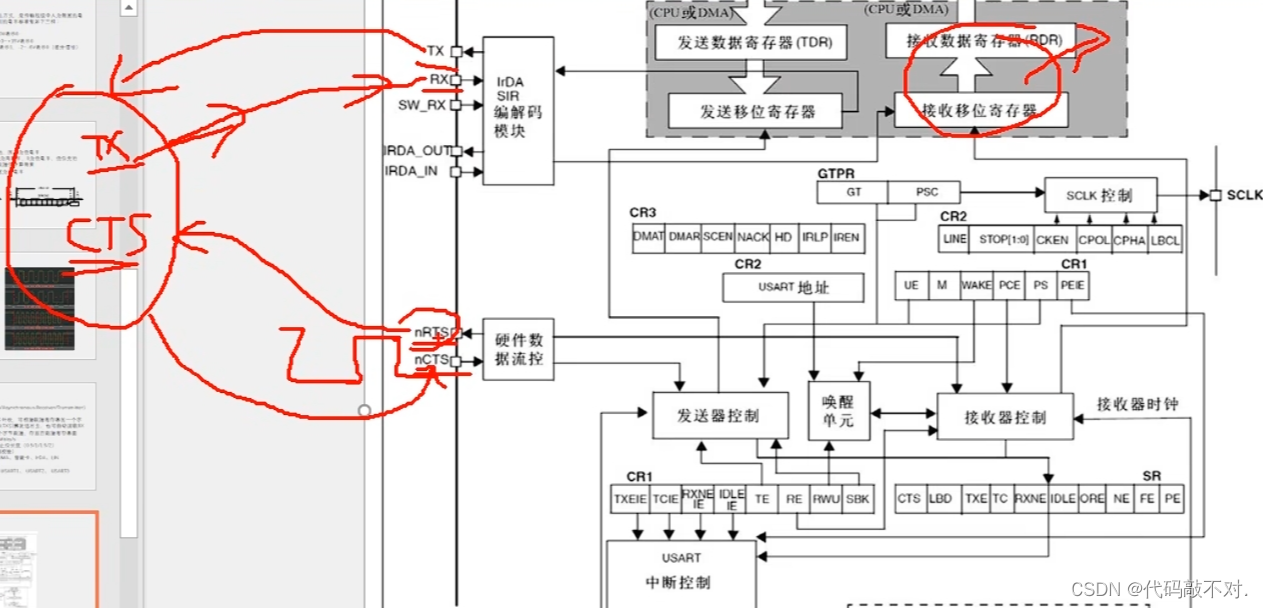
首先,我们需要找到一个支持流控的串口,并将它的TX连接到我们的RX。同时,我们的RTS需要输出一个接收反馈信号,并将其连接到对方的CTS。当我们可以接收数据时,RTS会置为低电平,请求对方发送。对方的CTS接收到信号后,就可以继续发送数据。如果处理不过来,比如接收数据寄存器未及时读取,导致新数据无法接收,此时RTS会置为高电平,对方的CTS接收到信号后,就会暂停发送,直到接收数据寄存器被读取,RTS重新置为低电平,数据才会继续发送。
当我们的TX向对方发送数据时,对方的RTS会连接到我们的CTS,用于判断对方是否可以接收数据。TX和CTS是一对对应的信号,RX和RTS也是一对对应的信号。此外,CTS和RTS之间也需要交叉连接,这就是流控的工作模式。然而,我们一般不使用流控,因此只需要了解一下即可。(少用原因应该是多消耗两根通信线)
接着继续看右边这个模块,这部分电路用于产生同步的时钟信号,它是配合发送移位寄存器输出的,发送寄存器每移位一次,同步时钟电平就跳变一个周期。时钟告诉对方,我移出去一位数据,你看要不要让我这个时钟信号来指导你接收一下?当然这个时钟只支持输出,不支持输入,所以两个USART之间,不能实现同步的串口通信。
那这个时钟信号的作用:
1.兼容别的协议。比如串口加上时钟之后,就跟SPI协议特别像,所以有了时钟输出的串口,就可以兼容SPI。
2.另外这个时钟也可以做自适应波特率,比如接收设备不确定发送设备给的什么波特率,然后再计算得到波特率,不过这就需要另外写程序来实现这个功能了。这个时钟功能,我们一般不用,所以也是了解一下就行。
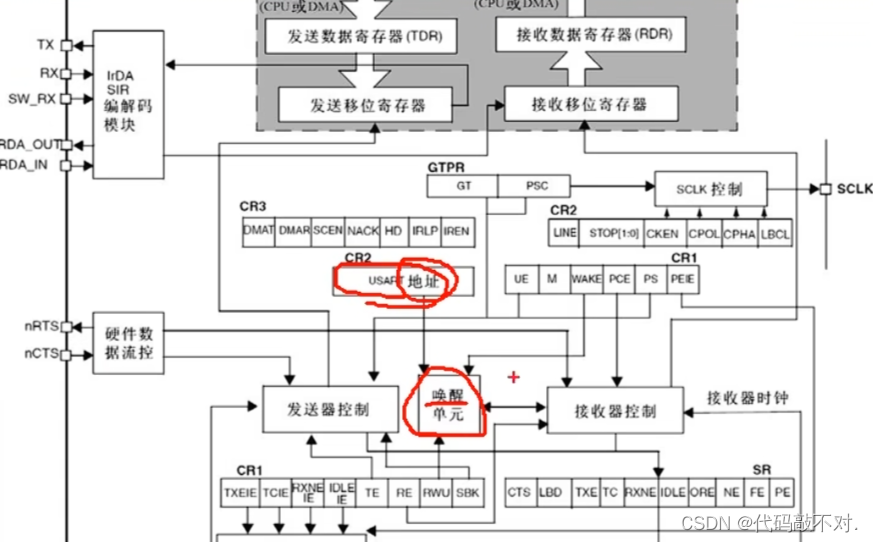
这部分的作用是实现串口挂载多设备。我们之前说,串口一般是点对点的通信(只支持两个设备互相通信)。而多设备,在一条总线上,可以接多个从设备,每个设备分配一个地址,我想跟某个设备通信,就先进行寻址,确定通信对象,再进行数据收发。
那回到这里,这个唤醒单元就可以用来实现多设备的功能,在这里可以给串口分配一个地址,当你发送指定地址时,此设备唤醒开始工作,当你发送别的设备地址时,别的设备就唤醒工作,这个设备没收到地址,就会保持沉默。这样就可以实现多设备的串口通信了,这部分功能我们一般不用。
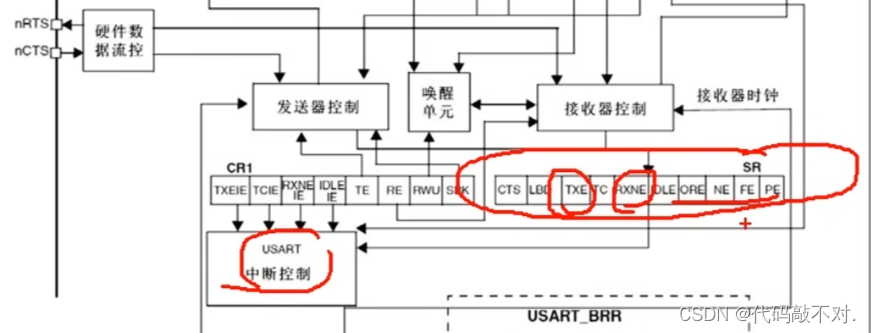
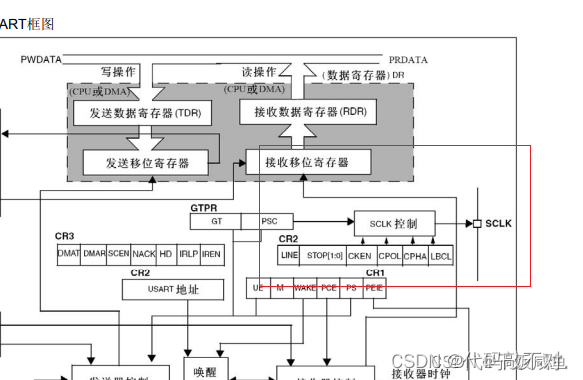
中断申请位,就是状态寄存器这里的各种标志位,状态寄存器这里,有两个标志位比较重要,一个是TXE发送寄存器空,另一个是RXNE接收寄存器非空,这两个是判断发送状态和接收状态的必要标志位,剩下的标志位,了解一下就行。中断输出控制这里,就是配置中断是不是能通向NVIC。
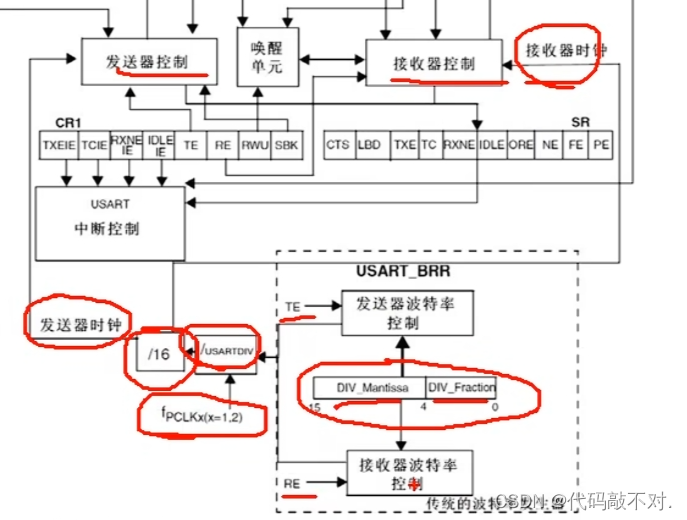
波特率发生器其实就是分频器,APB时钟进行分频,得到发送和接收移位的时钟。看一下,这里时钟输入是fPCLKx(x=1或2),(USART1挂载在APB2,所以就是PCLK2的时钟,一般是72M;其他的USART都挂载在APB1,所以是PCLK1的时钟,一般是36M)。
之后这个时钟进行一个分频,除一个USARTDIV的分频系数,并且分为了整数部分和小数部分,因为有些波特率,用72M除一个整数的话,可能除不尽,会有误差。所以这里分频系数是支持小数点后4位的,分频就更加精准,之后分频完之后,还要再除个16,得到发送器时钟和接收器时钟,通向控制部分。
然后右边这里,如果TE (TX Enable)为1,就是发送器使能了,发送部分的波特率就有效;如果RE(RX Enable)为1,就是接收器使能了,接收部分的波特率就有效。
串口引脚
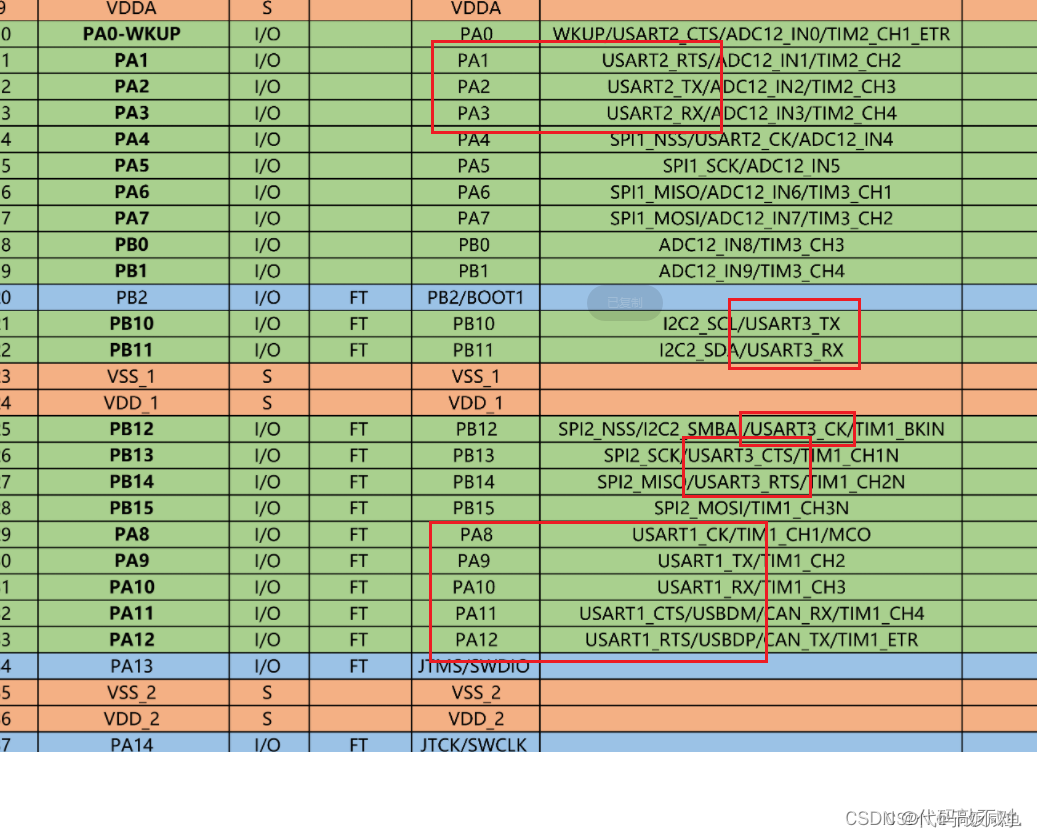
这些引脚都必须按照引脚定义里的规定来,或者看一下重映射这里,有没有重映射,这里有USART1的重映射,所以有机会换一次口,剩下引脚,就没有机会作为USART1的接口了。
USART基本结构
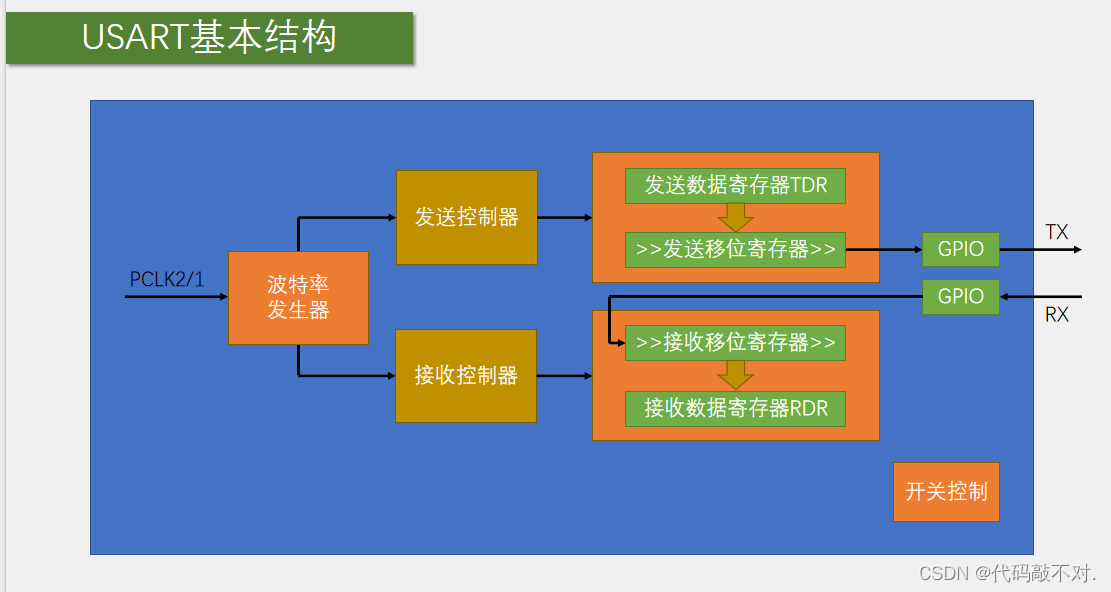
最左边这里是波特率发生器,用于产生约定的通信速率,时钟来源是PCLK2/1,经过波特率发生器分频后,产生的时钟通向发送控制器和接收控制器。发送控制器和接收控制器,用来控制发送移位和接收移位。
之后,由发送教据寄存器和发送移位寄存器这两个寄存器的配合,将数据一位一位地移出去,通过GPIO的复用掩出,输出到TX引脚,产生串口协议规定的波形,这里画了几个右移的符号,就是代表这个移位寄存器是往右格的,是低位先行。
当数琚由数据寄存器转到移位寄存器时,会置一个TXE的标志位,我们判断这个标志位,就可以知道是不是可以写下一个数据。
然后接收部分也是类似的,RX引脚的波形,通过GPIO输入,在接收控制器的控制,下,一位一位地移入接收移位寄存器,这里画了右移的符号,也是右移的,因为是低位先行,所以要从左边开始移进来,移完一帧数据后, 数据就会统一转运到接收数据寄存器,在转移的同时,会置一个RXNE标志位,我们检查这个标志位,就可以知道是不是收到数据了。同时这个标志位也可以去申请中断,这样就可以在收到数据时,直接进入中断函数,然后快速地读取和保存数据。
那右边这实际上有四个寄存器,但在软件层面,只有一个DR寄存器可以供我们读写,写入DR时,数据走上面这条路,进行发送,读取DR时,数据走下面这条路,进行接收,这就是USART进行串口数据收发的过程。
数据帧
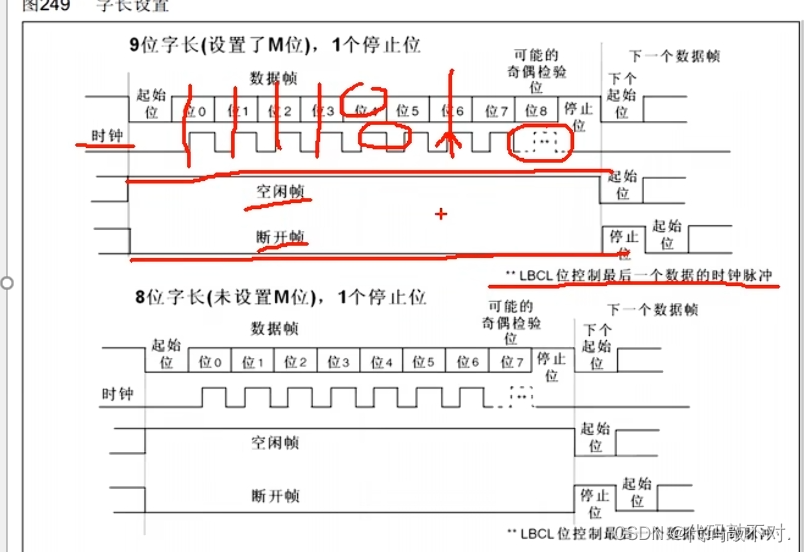
这个图,是在程序中配置8位字长和9位字长的波形对比。这里的字长,就是我们前面说的数据位长度。他这里的字长,是包含校验位的,是这种描述方式。
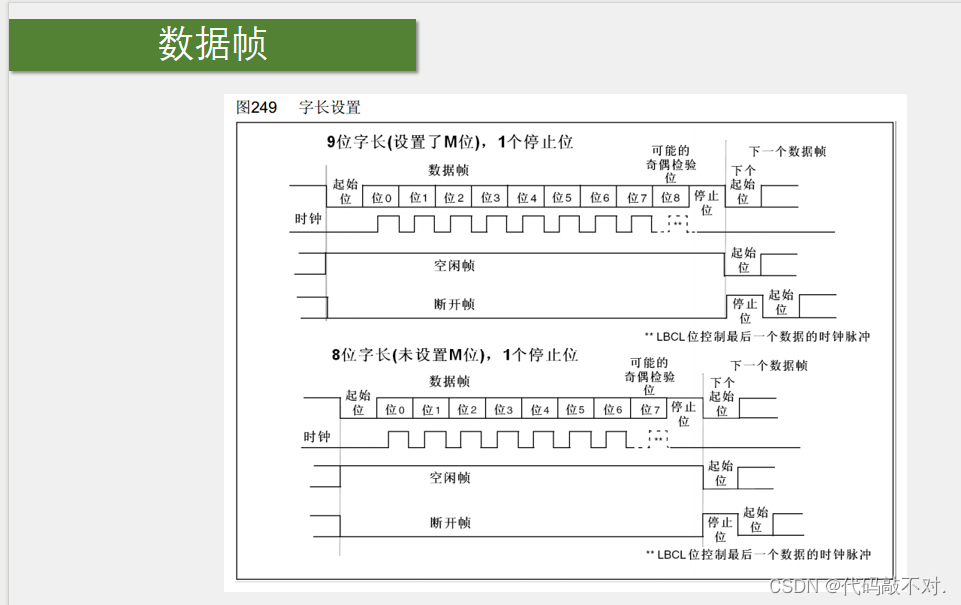
那看一下上面这个9位字长的波形,第一条时序很明显就是TX发送或者RX接收的数据帧格式。
空闲高电平,然后起始位0,然后根据写入的数据,置1或0,依次发送位0到位8,加起来就是9位,最后停止位1,数据帧结束。在这里位8,也就是第9个位置,是一个可能的奇偶校验位,通过配置寄存器就可以配置成奇校验、偶校验或者无校验,这里可以选择配置成8位有效载荷+1位校验位,也可以选择9位全都是有效载荷。不过既然你选择了9位字长,那一般都是要加上校验位的,因为8位有效载荷,正好对应一个字节。
然后下面这个时钟,就是我们之前说的同步时钟输出的功能,可以看到,这里在每个数据位的中
间,都有一个时钟上升沿,时钟的频率,和数据速率也是一样的,接收端可以在时钟上升沿进行采样,这样就可以精准定位每一位数据。这个时钟的最后位,可以通过这个LBCL位控制,要不要揄出。另外这个时钟的极性、相位什么的,也可以通过配置寄存器配置。
然后下面这两个波形,一个是空闲帧,就是从头到尾都是1;还有一个是断开帧,从头到尾都是0.这两个数据帧,是局域网协议用的,我们串口用不著,不用管的。
接下来是8位字长的波形,可以看到,这里的数据位是从位0一直到位7,总共是8位,比上面这个少了一个位8,同样这个最后一位位7,也是一个可能的奇偶校验位。还是同样,既然你选择了8位字长,那这里就最好选择无校验,要不然你校验位占1位,有效载荷就只剩7位了,一个字节都发不了。
不同停止位的波形变化
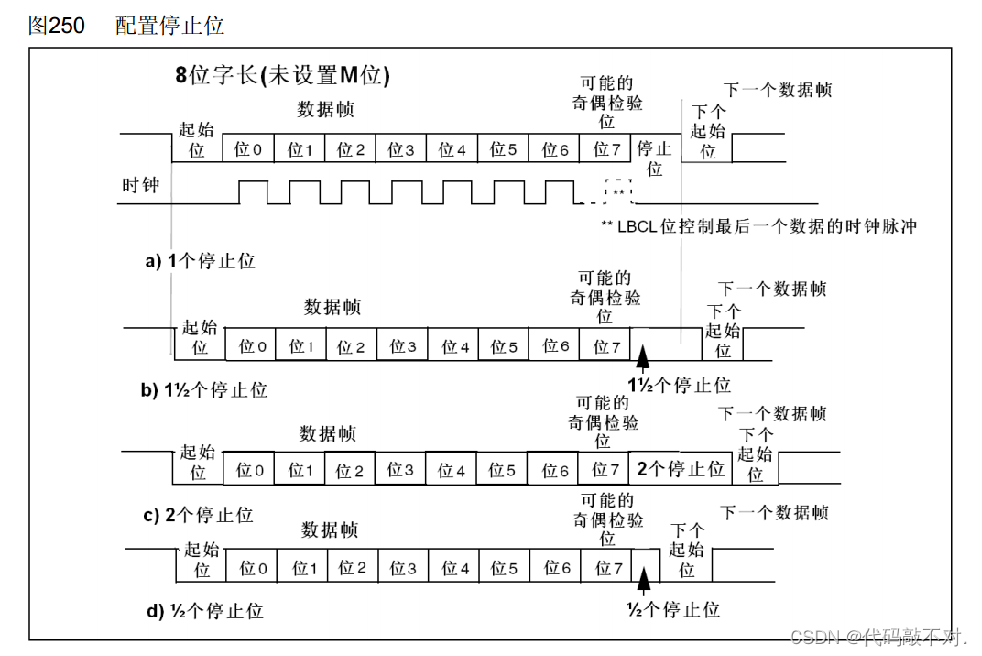
STM32的串口,可以配置停止位长度为0.5、1、1.5、2,这四种。
这四种参数的区别,就是停止位的时长不一样。第一个是1个停止位,这时停止位的时长就和数据位的一位,时长一样;然后是1.5个停止位,这时的停止位就是数据位一位,时长的1.5倍;2个停止位,那停止位时长就是2倍;0.5个停止位,时长就是0.5倍。这个也好理解,就是控制停止位时长的,一般选择1位停止位就行了,其他的参数不太常用。这个是停止位。
起始位侦测
那我们来看一下STM32是如何来设计输入电路的呢
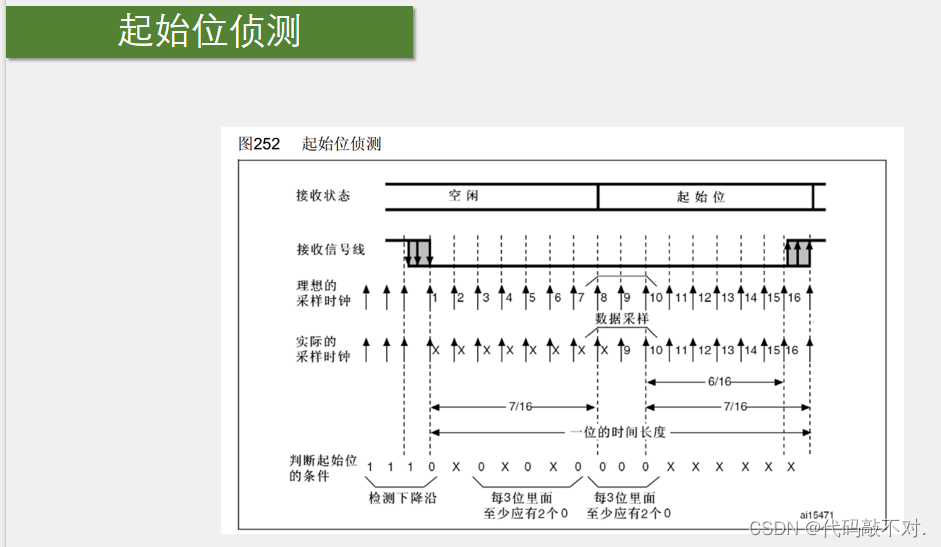 第一个图展示了USART的起始位侦测。当输入电路侦测到数据帧的起始位后,将以波特率的频率连续采样一帧数据。同时,从起始位开始,采样位置要对齐到位的正中间。只要第一位对齐了,后面就都是对齐的。
第一个图展示了USART的起始位侦测。当输入电路侦测到数据帧的起始位后,将以波特率的频率连续采样一帧数据。同时,从起始位开始,采样位置要对齐到位的正中间。只要第一位对齐了,后面就都是对齐的。
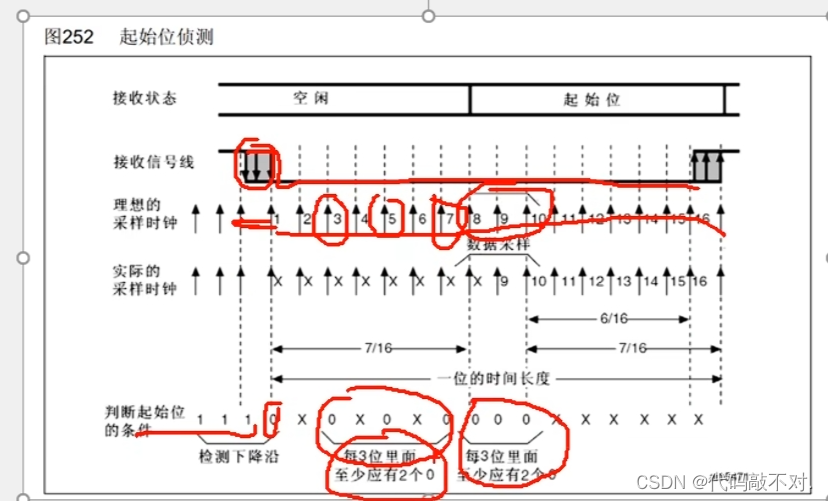
为了实现这些功能,输入电路对采样时钟进行了细分,以波特率的16倍频率进行采样。在一位的时间里,可以进行16次采样。比如最开始时,空闲状态为高电平,采样一直是1。在某个位置突然采到0,说明两次采样之间出现了下降沿,如果没有噪声,那之后就应该是起始位了。在起始位,会进行连续16次采样,没有噪声的话,这16次采样肯定都是0。但是实际电路还是会存在一些噪声,所以这里即使出现下降沿了,后续也要再采样几次以防万一。
根据手册描述,接收电路在下降沿之后的第3次、5次、7次进行一批采样,在第8次、9次、10次再进行一批采样。这两批采样都要求每3位里面至少应有2个0。如果没有噪声,那肯定全是0,满足情况;如果有一些轻微的噪声导致3位里面只有两个0,另一个是1,那也算是检测到了起始位(但是在状态寄存器里会置一个NE(Noise Error),提醒你数据收到了但是有噪声,你悠着点用);如果3位里面只有1个0,那就不算检测到了起始位,可能前面那个下降沿是噪声导致的,这时电路就忽略前面的数据重新开始捕捉下降沿。
这就是STM32的串口在接收过程中对噪声的处理。如果通过了这个起始位侦测那接收状态就由空闲变为接收起始位同时第8、9、10次采样的位置就正好是起始位的正中间。之后接收数据位时就在第8、9、10次进行采样这样就能保证采样位置在位的正中间了。这就是起始位侦测和采样位置对齐的策略。
数据采样
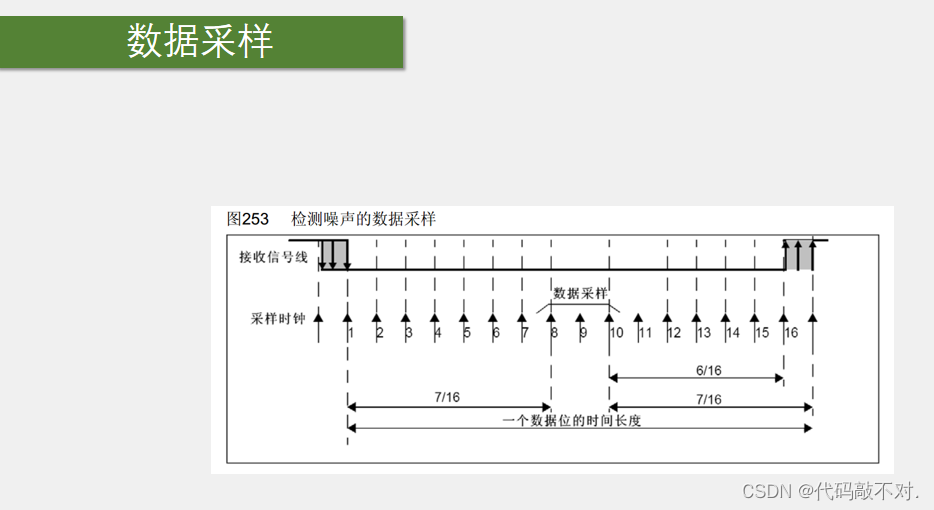
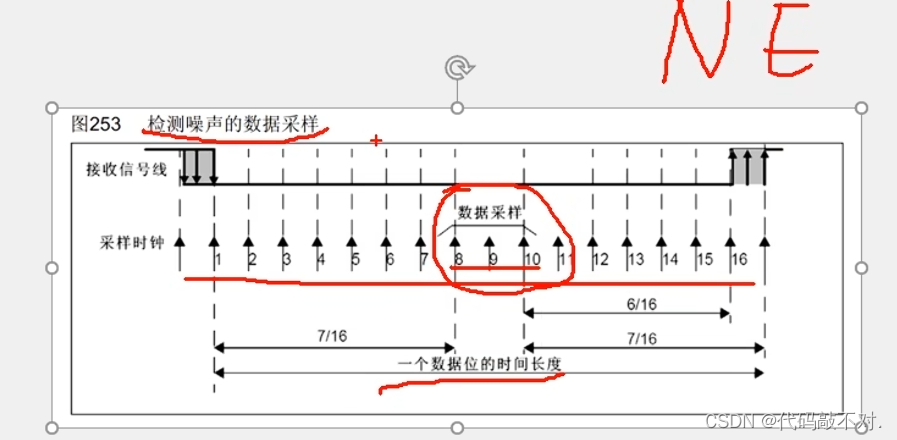
数据采样的流程:这里,从1到16,是一个数据位的时间长度,在一个数据位,有16个采样时钟,由于起始位侦测已经对齐了采样时钟,所以,这里就直接在第8、9、10次采样数据位。
为了保证数据的可靠性,这里是连续采样3次,没有噪声的理想情况下,这3次肯定全为1或者全为0,全为1,就认为收到了1,全为0,就认为收到了0;如果有噪声,导致3次采样不是全为1或者全为0,那它就按照2:1的规则来,2次为1,就认为收到了1,2次为0,就认为收到了0,在这种情况下,噪声标志位NE也会置1,告诉你,我收到数据了,但是有噪声,你悠着点用,这就是检测噪声的数据采样,可见STM32对这个电路的设计考虑还是很充分的。
波特率发生器
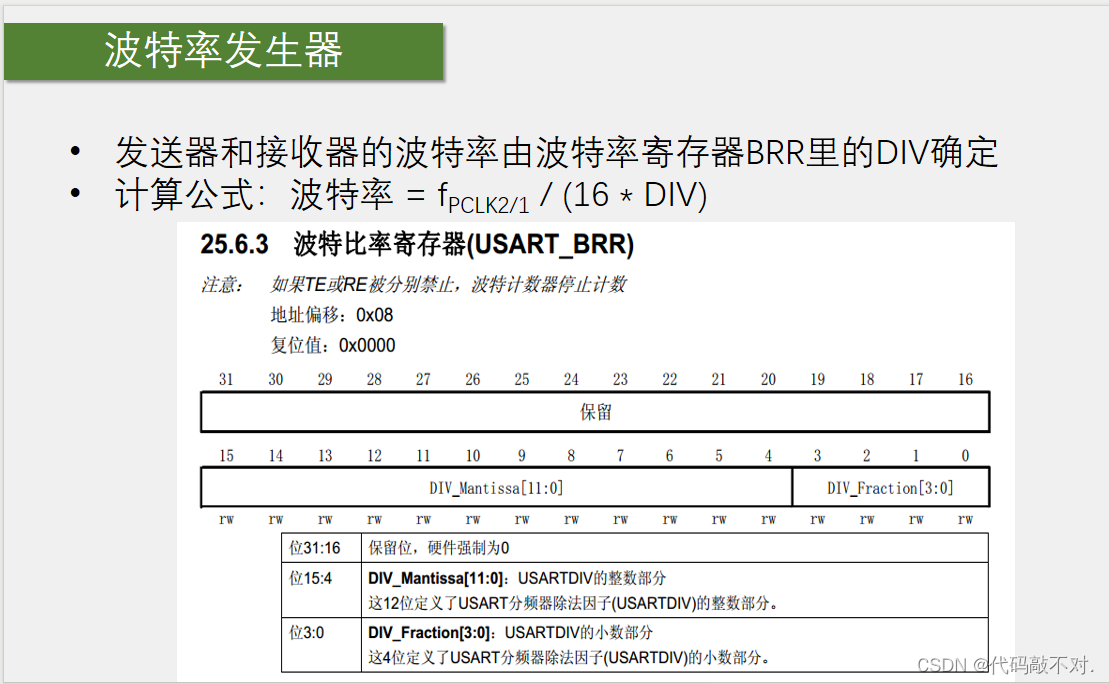
计算公式有个16,是因为它内部还有一个16倍波特率的采样时钟,所以这里输入时钟/DV要等于16倍的波特率,最终计算波特率,自然要多除一个16了。
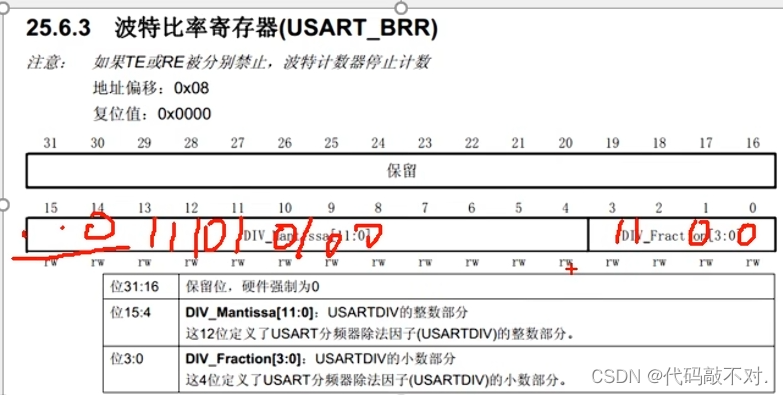
举个例子,比如我要配置USART1为9600的波特率,那如何配置这个BRR寄存器呢。
我们代入公式,就是9600等于 USART1的时钟是72M 除 16倍的DIV,解得,DIV=72M/9600/16,最终等于468.75,则二进制数是11101 0100.11v。所以最终写到这个寄存器就是整数部分为11101 0100,前面多出来的补0,小数部分为11,后面多出来的补0。这就是根据波特率写BRR寄存器的方法,了解一下,不过,我们用库函数配置的话,就非常方便,需要多少波特率,直接写就行了,库函数会自动帮我们算。
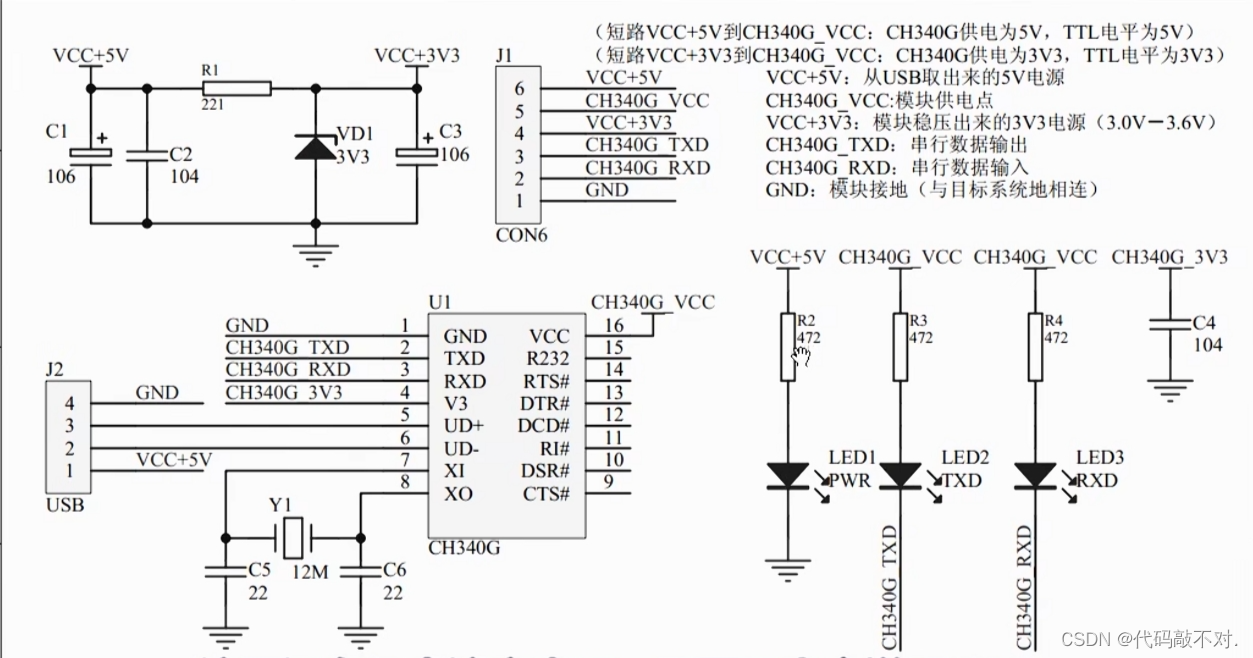
USB转串口模块原理图
相关文章:
USART串口外设
USART介绍 USART:另外我们经常还会遇到串口,叫UART,少了个S,就是通用异步收发器,一般我们串口很少使用这个同步功能,所以USART和UART使用起来,也没有什么区别。 其实这个STM32的USART同步模式&a…...
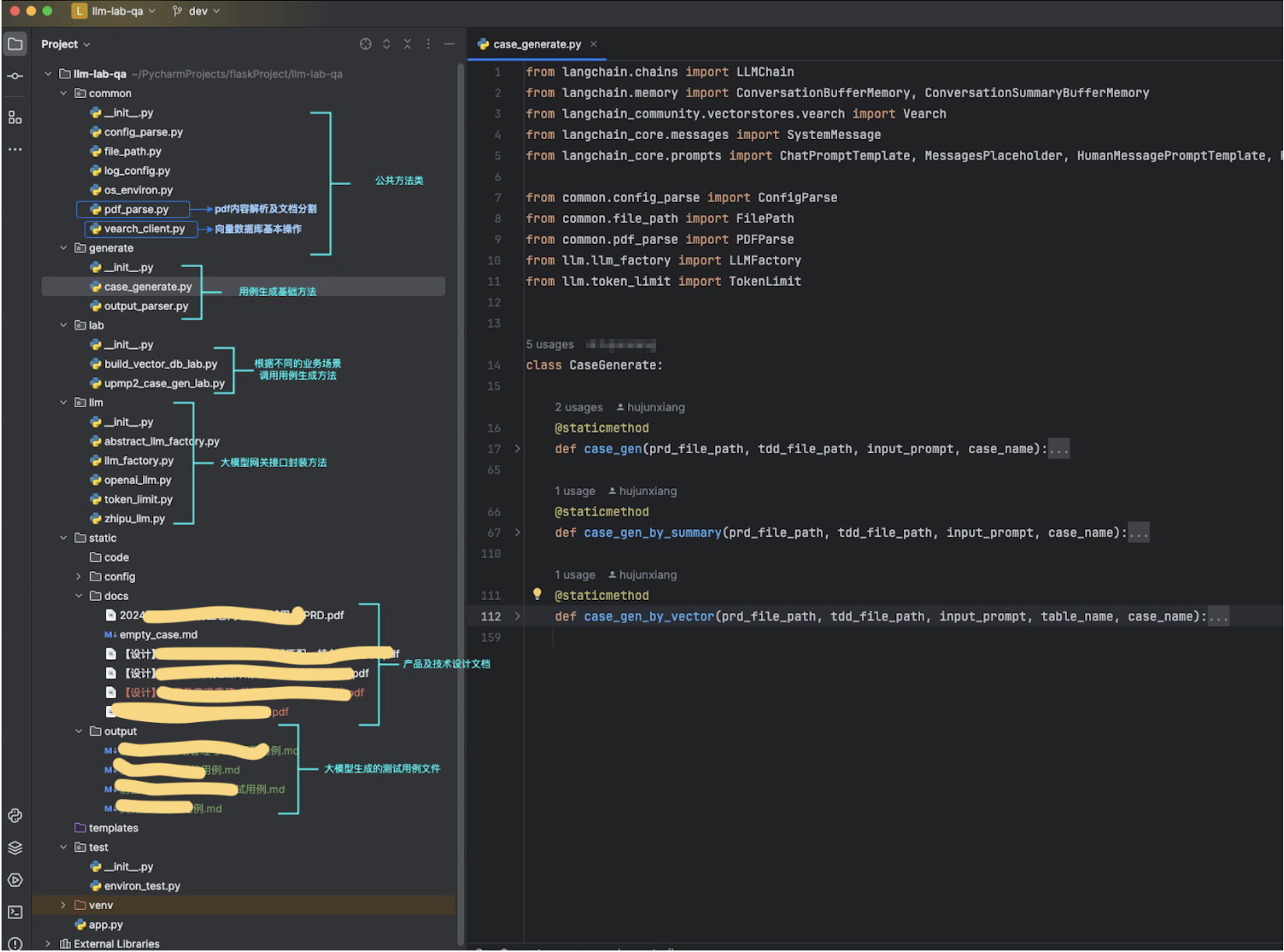
大模型应用之基于Langchain的测试用例生成
一 用例生成实践效果 在组内的日常工作安排中,持续优化测试技术、提高测试效率始终是重点任务。近期,我们在探索实践使用大模型生成测试用例,期望能够借助其强大的自然语言处理能力,自动化地生成更全面和高质量的测试用例。 当前…...
C++之map
1、标准库的map类型 2、插入数据 #include <map> #include <string> #include <iostream>using namespace std;int main() {map<string, int> mapTest;// 插入到map容器内部的元素是默认按照key从小到大来排序// key类型一定要重载小于号<运算符map…...

【量算分析工具-方位角】GeoServer改造Springboot番外系列六
【量算分析工具-概述】GeoServer改造Springboot番外系列三-CSDN博客 【量算分析工具-水平距离】GeoServer改造Springboot番外系列四-CSDN博客 【量算分析工具-水平面积】GeoServer改造Springboot番外系列五-CSDN博客 【量算分析工具-方位角】GeoServer改造Springboot番外系列…...

【机器学习】机器学习与大模型在人工智能领域的融合应用与性能优化新探索
文章目录 引言机器学习与大模型的基本概念机器学习概述监督学习无监督学习强化学习 大模型概述GPT-3BERTResNetTransformer 机器学习与大模型的融合应用自然语言处理文本生成文本分类机器翻译 图像识别自动驾驶医学影像分析 语音识别智能助手语音转文字 大模型性能优化的新探索…...
上传图片并显示#Vue3#后端接口数据
上传图片并显示#Vue3#后端接口数据 效果: 上传并显示图片 代码: <!-- 上传图片并显示 --> <template><!-- 上传图片start --><div><el-form><el-form-item><el-uploadmultipleclass"avatar-uploader&quo…...
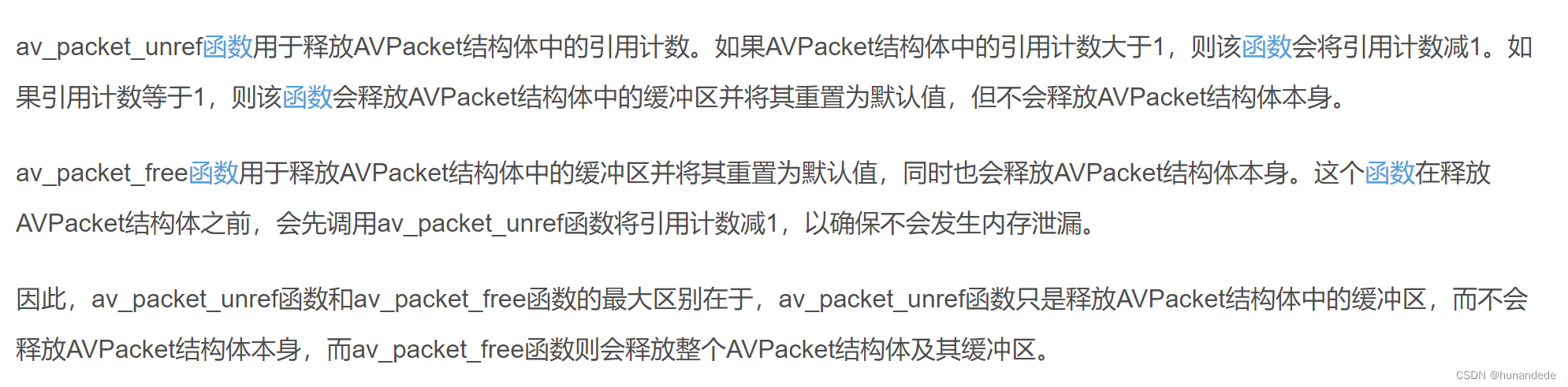
音视频开发14 FFmpeg 视频 相关格式分析 -- H264 NALU格式分析
H264简介-也叫做 AVC H.264,在MPEG的标准⾥是MPEG-4的⼀个组成部分–MPEG-4 Part 10,⼜叫Advanced Video Codec,因此常常称为MPEG-4 AVC或直接叫AVC。 原始数据YUV,RGB为什么要压缩-知道就行 在⾳视频传输过程中,视频⽂件的传输…...
Qt学习记录(15)数据库
目录 前言: 数据库连接 项目文件加上sql 打印查看Qt支持哪些数据库驱动 QMYSQL [static] QSqlDatabase QSqlDatabase::addDatabase(const QString &type, const QString &connectionName QLatin1String(defaultConnection)) 数据库插入 头文件.h 源…...

c++常用设计模式
1、单例模式(Singleton):保证一个类只有一个实例,提供一个全局访问点; class Singleton { private:static Singleton* instance;Singleton() {}public:static Singleton* getInstance() {if (instance nullptr) {instance new Singleton()…...

【动手学深度学习】softmax回归从零开始实现的研究详情
目录 🌊1. 研究目的 🌊2. 研究准备 🌊3. 研究内容 🌍3.1 softmax回归的从零开始实现 🌍3.2 基础练习 🌊4. 研究体会 🌊1. 研究目的 理解softmax回归的原理和基本实现方式;学习…...
MySQL:MySQL执行一条SQL查询语句的执行过程
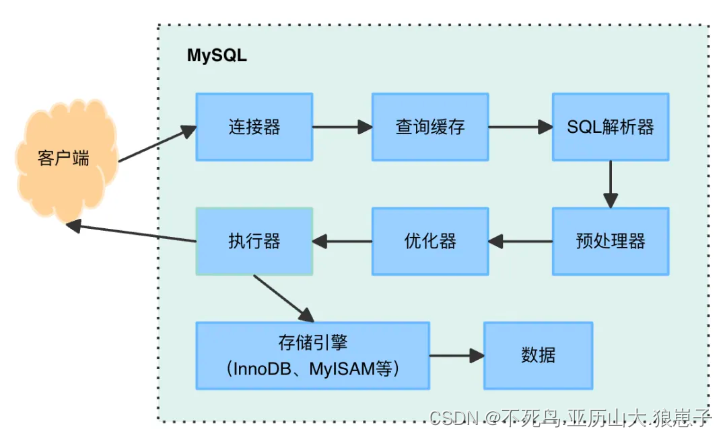
当多个客户端同时连接到MySQL,用SQL语句去增删改查数据,针对查询场景,MySQL要保证尽可能快地返回客户端结果。 了解了这些需求场景,我们可能会对MySQL进行如下设计: 其中,连接器管理客户端的连接,负责管理连接、认证鉴权等;查询缓存则是为了加速查询,命中则直接返回结…...

解决Python导入第三方模块报错“TypeError: the first argument must be callable”
注意以下内容只对导包时遇到同样的报错会有参考价值。 问题描述 当你尝试导入第三方模块时,可能会遇到如下报错信息: TypeError: the first argument must be callable 猜测原因 经过仔细检查代码,我猜测这个错误的原因是由于变量名冲突所…...

在python中连接了数据库后想要在python中通过图形化界面显示数据库的查询结果,请问怎么实现比较好? /ttk库的treeview的使用
在Python中,你可以使用图形用户界面(GUI)库来显示数据库的查询结果。常见的GUI库包括Tkinter(Python自带)、PyQt、wxPython等。以下是一个使用Tkinter库来显示数据库查询结果的简单示例。 首先,你需要确保…...

OZON的选品工具,OZON选品工具推荐
在电商领域,选品一直是决定卖家成功与否的关键因素之一。随着OZON平台的崛起,越来越多的卖家开始关注并寻求有效的选品工具,以帮助他们在这个竞争激烈的市场中脱颖而出。本文将详细介绍OZON的选品工具,并推荐几款实用的辅助工具&a…...

营销方案撰写秘籍:包含内容全解析,让你的方案脱颖而出
做了十几年品牌,策划出身,混迹过几个知名广告公司,个人经验供楼主参考。 只要掌握以下这些营销策划案的要点,你就能制作出既全面又专业的策划案,让你的工作成果不仅得到同事的认可,更能赢得老板的赏识&…...

如何制作一本温馨的电子相册呢?
随着科技的不断发展,电子相册已经成为了一种流行的方式来记录和分享我们的生活。一张张照片,一段段视频,都能让我们回忆起那些温馨的时光。那么,如何制作一本温馨的电子相册呢? 首先,选择一款合适的电子相册…...

485通讯网关
在工业自动化与智能化的浪潮中,数据的传输与交互显得尤为重要。作为这一领域的核心设备,485通讯网关凭借其卓越的性能和广泛的应用场景,成为了连接不同设备、不同协议之间数据转换和传输的桥梁。在众多485通讯网关中,HiWoo Box以其…...

Anaconda中的常用科学计算工具
Anaconda中的常用科学计算工具 Anaconda是一个流行的Python科学计算环境,它提供了大量的科学计算工具,这些工具可以帮助用户进行数据分析、机器学习、深度学习等任务。以下是一些常见的Anaconda中的科学计算工具: NumPy:一个用于…...
Java 中BigDecimal传到前端后精度丢失问题
1.用postman访问接口,返回的小数点精度正常 2.返回到页面里的,小数点丢失 3.解决办法,在字段上加注解 JsonFormat(shape JsonFormat.Shape.STRING) 或者 JsonSerialize(using ToStringSerializer.class) import com.fasterxml.jackson.a…...

在Linux/Ubuntu/Debian上安装TensorFlow 2.14.0
在Ubuntu上安装TensorFlow 2.14.0,可以遵循以下步骤。请注意,由于TensorFlow的版本更新可能很快,这里提供的具体步骤可能需要根据你的系统环境和实际情况进行微调。 准备工作 检查系统要求:确保你的Ubuntu系统满足TensorFlow的运…...

X-TRACK开源GPS自行车码表深度解析:从嵌入式架构到离线地图的完全实战指南
X-TRACK开源GPS自行车码表深度解析:从嵌入式架构到离线地图的完全实战指南 【免费下载链接】X-TRACK A GPS bicycle speedometer that supports offline maps and track recording 项目地址: https://gitcode.com/gh_mirrors/xt/X-TRACK X-TRACK是一款基于A…...

微信小程序逆向工程:5步掌握wxappUnpacker核心技术与安全分析实战
微信小程序逆向工程:5步掌握wxappUnpacker核心技术与安全分析实战 【免费下载链接】wxappUnpacker forked from https://github.com/qwerty472123/wxappUnpacker 项目地址: https://gitcode.com/gh_mirrors/wxappu/wxappUnpacker 在当今移动应用生态中&#…...
)
STM32CubeMX配置SPI驱动W25Q128实战:从硬件连接到DMA优化(附完整代码)
STM32CubeMX配置SPI驱动W25Q128实战:从硬件连接到DMA优化 在嵌入式开发中,SPI接口的Flash存储器因其高速、简单和可靠的特点,成为存储配置数据、日志和固件的理想选择。W25Q128作为Winbond公司推出的128Mbit串行Flash存储器,广泛…...

物理学巅峰成就巡礼:从牛顿到量子,探索宇宙与微观世界的革命性突破
1. 项目概述:一次对物理学巅峰成就的巡礼2019年,诺贝尔物理学奖授予了三位天体物理学家——詹姆斯皮布尔斯、米歇尔马约尔和迪迪埃奎洛兹,以表彰他们在物理宇宙学理论以及系外行星发现领域的开创性贡献。这个奖项像一束聚光灯,将公…...

欢迎新Buddy:DataBuddy
大数据人自己的原生Agent来了!腾讯云大数据智能体工作台DataBuddy正式发布。用户通过自然语言对话,即可完成数据接入、开发、治理、分析全链路任务,不用再在多个页面之间切换操作,一句话说清目标,Agent自己跑完全流程。…...

RK3576开发板RTC硬件扩展与Linux时间管理实战指南
1. 项目概述与核心价值在嵌入式开发中,尤其是在像RK3576这类高性能AIoT开发板上,一个稳定可靠的实时时钟(RTC)往往是项目从“玩具”走向“产品”的关键一步。它不仅仅是显示个时间那么简单,更是系统日志时间戳准确、定…...

1688代采系统开发避坑指南:经验之谈
做跨境代购系统三年了,技术栈换过一次。今天把当初的技术选型过程和踩坑经验整理出来。多页面架构(MPA)的选择:没有用 React/Vue SPA 做租户端前台的首页和商品页,而是传统的多页面(HTML JS jQuery&#…...

Gemini3.1Pro攻克长文本quot;迷失中间quot;难题
长上下文“迷失在中间”的缓解策略:Gemini 3.1 Pro 的可验证工程路径(不靠玄学,只看指标闭环)长上下文的一个经典难题是“迷失在中间”:模型并非简单地把信息“看不见”,而是当关键证据位于输入中间区域时&…...

2026 SSH工具推荐:不装传统面板,还有什么更适合管理 Linux 服务器?
这几年很多人选 SSH 工具,已经不只是为了“远程登上服务器敲命令”。 真正常见的需求其实是:连上服务器之后,还要继续完成文件管理、服务部署、HTTPS 配置、站点检查,甚至多台 VPS 的统一管理。 也正因为这样,到了 202…...

使用workbuddy 30分钟搭建微信小程序
前言 今天发现一个超好用的工具WorkBuddy可以非常快速地进行搭建小程序,还有进行一些代码的修改,简直是一个开发小程序的好帮手,今天用一节很小的短篇介绍一下整个创建部署和搭建过程。 第一步下载workbuddy 创建小程序 首先需要下载work…...