轨迹优化 | 图解欧氏距离场与梯度场算法(附ROS C++/Python实现)
目录
- 0 专栏介绍
- 1 什么是距离场?
- 2 欧氏距离场计算原理
- 3 双线性插值与欧式梯度场
- 4 仿真实现
- 4.1 ROS C++实现
- 4.2 Python实现
0 专栏介绍
🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的运动规划算法实战:曲线生成与轨迹优化、碰撞模型与检测、多智能体群控、深度强化学习运动规划、社会性导航、全覆盖路径规划等内容,每个模型都包含代码实现加深理解。
🚀详情:运动规划实战进阶
1 什么是距离场?
距离场(Distance Field)也称为距离变换(Distance Transform),在图像处理和模式识别中是一种重要工具,其核心思想是将图像中每个像素点的值表示为到最近的目标像素的距离度量,更高维的情况依次类推。在计算机视觉领域,距离场是图像分割和配准的基础,在运动规划中则常用于地图建模(广义Voronoi图计算)和轨迹梯度优化。

给定点集 G \mathcal{G} G和其上的目标点集 Q ⊆ G Q\subseteq \mathcal{G} Q⊆G,可以定义函数
D I ( p ) = min q ∈ G ( d ( p , q ) + I ( q ) ) \mathcal{D} _I\left( p \right) =\min _{q\in \mathcal{G}}\left( d\left( p,q \right) +I\left( q \right) \right) DI(p)=q∈Gmin(d(p,q)+I(q))
计算任意一点 p p p到 Q Q Q的最近距离,其中距离度量 d ( ⋅ , ⋅ ) d\left( \cdot ,\cdot \right) d(⋅,⋅)定义了距离场的属性,指示函数
I Q ( q ) = { 0 , i f q ∈ Q ∞ , o t h e r w i s e I_Q\left( q \right) =\begin{cases} 0, \mathrm{if} q\in Q\\ \infty , \mathrm{otherwise}\\\end{cases} IQ(q)={0,ifq∈Q∞,otherwise
常用的 d ( ⋅ , ⋅ ) d\left( \cdot ,\cdot \right) d(⋅,⋅)为
- 欧氏距离,此时称为欧氏距离变换(Euclidean Distance Transform, EDT)
- 曼哈顿距离,此时称为曼哈顿距离变换(Manhattan Distance Transform, MDT)
- 切比雪夫距离,此时称为切比雪夫距离变换(Chebyshev Distance Transform, CDT)
- …
2 欧氏距离场计算原理
n n n维距离场可以通过一维距离场迭代计算得到,因此只需要讨论一维EDT的计算即可。如下图左侧所示为初始计算轴的EDT计算,右侧所示为更一般的情况,此时障碍物处的采样函数叠加了前轴计算信息。

注意到 O \mathcal{O} O定义了一系列以障碍物 q ∈ O q\in \mathcal{O} q∈O为顶点的抛物线,而 ∀ p ∈ G \forall p\in \mathcal{G} ∀p∈G在系列抛物线形成的下包络的投影组成了距离场 D f ( p ) \mathcal{D} _f\left( p \right) Df(p),而下包络的计算与抛物线交点有关。联立两条抛物线 ( s − q ) 2 + f ( q ) = ( s − r ) 2 + f ( r ) \left( s-q \right) ^2+f\left( q \right) =\left( s-r \right) ^2+f\left( r \right) (s−q)2+f(q)=(s−r)2+f(r)可得
s = ( f ( r ) + r 2 ) − ( f ( q ) + q 2 ) 2 r − 2 q s=\frac{\left( f\left( r \right) +r^2 \right) -\left( f\left( q \right) +q^2 \right)}{2r-2q} s=2r−2q(f(r)+r2)−(f(q)+q2)
即任意两条抛物线有且仅有一个交点 s s s。设 K \mathcal{K} K为实际组成下包络的抛物线集合, v ( k ) v\left( k \right) v(k)表示其中第 k k k条抛物线的顶点, z ( k ) z\left( k \right) z(k)表示第 k k k条和第 k − 1 k-1 k−1条抛物线的交点,区间 [ z ( k ) , z ( k + 1 ) ) \left[ z\left( k \right) ,z\left( k+1 \right) \right) [z(k),z(k+1))表示第 k k k条抛物线的下包络范围。在遍历求解下包络过程中,对于新的抛物线 e e e,其与 K \mathcal{K} K中最新的一条抛物线 k k k的交点 s s s有两种情况:
- 若 s > z ( k ) s>z\left( k \right) s>z(k),则将 e e e添加到 K \mathcal{K} K中并更新 v ( k ) v\left( k \right) v(k)、 z ( k ) z\left( k \right) z(k);
- 若 s ⩽ z ( k ) s\leqslant z\left( k \right) s⩽z(k),则第 k k k条抛物线不参与构成下包络,应从 K \mathcal{K} K中删除并重新计算 e e e与新的第 k k k条抛物线的交点直至 s s s在 z ( k ) z(k) z(k)右侧;
算法流程如表所示

3 双线性插值与欧式梯度场
在求解梯度过程中,需要计算离散距离场的线性插值函数。以二维环境的双线性插值为例,设已知离散空间有四点坐标为 A ( x 1 , y 1 ) A\left( x_1,y_1 \right) A(x1,y1)、 B ( x 2 , y 1 ) B\left( x_2,y_1 \right) B(x2,y1) 、 C ( x 1 , y 2 ) C\left( x_1,y_2 \right) C(x1,y2)与 D ( x 2 , y 2 ) D\left( x_2,y_2 \right) D(x2,y2),对其中任意一点 P P P,首先在 x x x方向上插值
{ f ( R 1 ) = f ( x , y 1 ) = x 2 − x x 2 − x 1 f ( A ) + x − x 1 x 2 − x 1 f ( B ) f ( R 2 ) = f ( x , y 2 ) = x 2 − x x 2 − x 1 f ( C ) + x − x 1 x 2 − x 1 f ( D ) \begin{cases} f\left( R_1 \right) =f\left( x,y_1 \right) =\frac{x_2-x}{x_2-x_1}f\left( A \right) +\frac{x-x_1}{x_2-x_1}f\left( B \right)\\ f\left( R_2 \right) =f\left( x,y_2 \right) =\frac{x_2-x}{x_2-x_1}f\left( C \right) +\frac{x-x_1}{x_2-x_1}f\left( D \right)\\\end{cases} {f(R1)=f(x,y1)=x2−x1x2−xf(A)+x2−x1x−x1f(B)f(R2)=f(x,y2)=x2−x1x2−xf(C)+x2−x1x−x1f(D)
再基于插值点 R 1 R_1 R1、 R 2 R_2 R2进行 y y y方向的插值
f ( P ) = f ( x , y ) = y 2 − y y 2 − y 1 f ( R 1 ) + y − y 1 y 2 − y 1 f ( R 2 ) f\left( P \right) =f\left( x,y \right) =\frac{y_2-y}{y_2-y_1}f\left( R_1 \right) +\frac{y-y_1}{y_2-y_1}f\left( R_2 \right) f(P)=f(x,y)=y2−y1y2−yf(R1)+y2−y1y−y1f(R2)
展开可得矩阵形式
f ( x , y ) = 1 ( x 2 − x 1 ) ( y 2 − y 1 ) [ x 2 − x x − x 1 ] T [ f ( A ) f ( C ) f ( B ) f ( D ) ] [ y 2 − y y − y 1 ] f\left( x,y \right) =\frac{1}{\left( x_2-x_1 \right) \left( y_2-y_1 \right)}\left[ \begin{array}{c} x_2-x\\ x-x_1\\\end{array} \right] ^T\left[ \begin{matrix} f\left( A \right)& f\left( C \right)\\ f\left( B \right)& f\left( D \right)\\\end{matrix} \right] \left[ \begin{array}{c} y_2-y\\ y-y_1\\\end{array} \right] f(x,y)=(x2−x1)(y2−y1)1[x2−xx−x1]T[f(A)f(B)f(C)f(D)][y2−yy−y1]

对于离散栅格坐标而言, x 2 − x 1 = y 2 − y 1 = 1 x_2-x_1=y_2-y_1=1 x2−x1=y2−y1=1,设 Δ x = x − x 1 \varDelta x=x-x_1 Δx=x−x1与 Δ y = y − y 1 \varDelta y=y-y_1 Δy=y−y1,则插值函数简化为
f ( Δ x , Δ y ) = [ 1 − Δ x Δ x ] T [ f ( A ) f ( C ) f ( B ) f ( D ) ] [ 1 − Δ y Δ y ] f\left( \varDelta x,\varDelta y \right) =\left[ \begin{array}{c} 1-\varDelta x\\ \varDelta x\\\end{array} \right] ^T\left[ \begin{matrix} f\left( A \right)& f\left( C \right)\\ f\left( B \right)& f\left( D \right)\\\end{matrix} \right] \left[ \begin{array}{c} 1-\varDelta y\\ \varDelta y\\\end{array} \right] f(Δx,Δy)=[1−ΔxΔx]T[f(A)f(B)f(C)f(D)][1−ΔyΔy]
则函数 f f f在任意一点的梯度为
∇ f ( Δ x , Δ y ) = [ ∂ f ( Δ x , Δ y ) ∂ Δ x ∂ f ( Δ x , Δ y ) ∂ Δ y ] = [ [ − 1 1 ] T [ f ( A ) f ( C ) f ( B ) f ( D ) ] [ 1 − Δ y Δ y ] [ 1 − Δ x Δ x ] T [ f ( A ) f ( C ) f ( B ) f ( D ) ] [ − 1 1 ] ] \nabla f\left( \varDelta x,\varDelta y \right) =\left[ \begin{array}{c} \frac{\partial f\left( \varDelta x,\varDelta y \right)}{\partial \varDelta x}\\ \frac{\partial f\left( \varDelta x,\varDelta y \right)}{\partial \varDelta y}\\\end{array} \right] =\left[ \begin{array}{c} \left[ \begin{array}{c} -1\\ 1\\\end{array} \right] ^T\left[ \begin{matrix} f\left( A \right)& f\left( C \right)\\ f\left( B \right)& f\left( D \right)\\\end{matrix} \right] \left[ \begin{array}{c} 1-\varDelta y\\ \varDelta y\\\end{array} \right]\\ \left[ \begin{array}{c} 1-\varDelta x\\ \varDelta x\\\end{array} \right] ^T\left[ \begin{matrix} f\left( A \right)& f\left( C \right)\\ f\left( B \right)& f\left( D \right)\\\end{matrix} \right] \left[ \begin{array}{c} -1\\ 1\\\end{array} \right]\\\end{array} \right] ∇f(Δx,Δy)=[∂Δx∂f(Δx,Δy)∂Δy∂f(Δx,Δy)]=⎣⎢⎢⎡[−11]T[f(A)f(B)f(C)f(D)][1−ΔyΔy][1−ΔxΔx]T[f(A)f(B)f(C)f(D)][−11]⎦⎥⎥⎤
4 仿真实现
4.1 ROS C++实现
核心代码如下所示
GradientLayer::updateCosts(nav2_costmap_2d::Costmap2D & master_grid, int min_i, int min_j,int max_i,int max_j)
{if (!enabled_) {return;}unsigned char * master_array = master_grid.getCharMap();unsigned int size_x = master_grid.getSizeInCellsX(), size_y = master_grid.getSizeInCellsY();// Fixing window coordinates with map size if necessary.min_i = std::max(0, min_i);min_j = std::max(0, min_j);max_i = std::min(static_cast<int>(size_x), max_i);max_j = std::min(static_cast<int>(size_y), max_j);// Simply computing one-by-one cost per each cellint gradient_index;for (int j = min_j; j < max_j; j++) {// Reset gradient_index each time when reaching the end of re-calculated window// by OY axis.gradient_index = 0;for (int i = min_i; i < max_i; i++) {int index = master_grid.getIndex(i, j);// setting the gradient costunsigned char cost = (LETHAL_OBSTACLE - gradient_index*GRADIENT_FACTOR)%255;if (gradient_index <= GRADIENT_SIZE) {gradient_index++;} else {gradient_index = 0;}master_array[index] = cost;}}
}
4.2 Python实现
欧氏距离场核心代码
def compute(self, f_get, mat: np.ndarray, dim: int) -> np.array:"""Compute distance field along one-dimension baseon sample funciton f_get.Parameters:f_get (function): sample functionmat (np.ndarray): the matrix to transformdim (int): the dimension to transformReturns:df (np.array): the distance field along dim-dimension"""# initialzationk = 0n = mat.shape[dim]v, z = [0 for _ in range(n)], [0 for _ in range(n + 1)]z[0], z[1] = -self.INF, self.INF# envelopefor q in range(1, n):s = ((f_get(v[k]) + v[k] ** 2) - (f_get(q) + q ** 2)) / (2 * (v[k] - q))while s <= z[k]:k -= 1s = ((f_get(v[k]) + v[k] ** 2) - (f_get(q) + q ** 2)) / (2 * (v[k] - q))k += 1v[k] = qz[k], z[k + 1] = s, self.INF# distance calculationk = 0edf = np.zeros((n, ))for q in range(n):while z[k + 1] < q:k += 1edf[q] = (q - v[k]) ** 2 + f_get(v[k])return edf
欧氏梯度场核心代码:
def gradient(self, df: np.ndarray, x: float, y: float) -> np.array:"""To obtain the gradient at (x, y) in the distance field through bilinear interpolation.Parameters:df (np.ndarray): the distance fieldx/y (float): the query coordinateReturns:g(x, y): the gradient at (x, y)"""m, n = df.shapex, y = max(min(n - 1, x), 0), max(min(m - 1, y), 0)xi, yi = int(x), int(y)dx, dy = x - xi, y - yixi, yi = max(min(n - 1, xi), 0), max(min(m - 1, yi), 0)xp, yp = max(min(n - 1, xi + 1), 0), max(min(m - 1, yi - 1), 0)bl, br = df[yi, xi], df[yi, xp]tl, tr = df[yp, xi], df[yp, xp]return np.array([(1 - dy) * (br - bl) + dy * (tr + tl),-((1 - dx) * (tl - bl) + dx * (tr - br))])
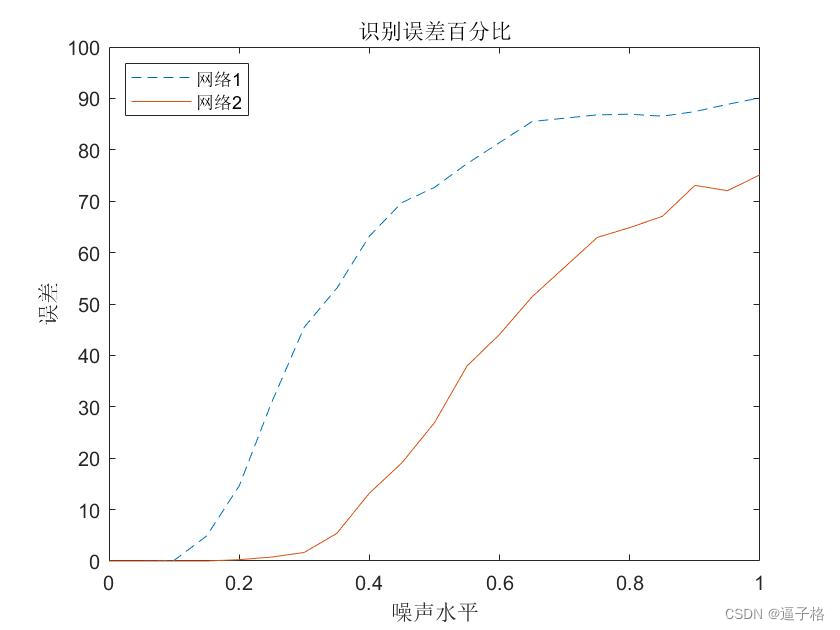
效果如下所示

一个实际地图的案例如下

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
轨迹优化 | 图解欧氏距离场与梯度场算法(附ROS C++/Python实现)
目录 0 专栏介绍1 什么是距离场?2 欧氏距离场计算原理3 双线性插值与欧式梯度场4 仿真实现4.1 ROS C实现4.2 Python实现 0 专栏介绍 🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的运动规划算法实战:曲线生成…...

【二维差分】2132. 用邮票贴满网格图
本文涉及知识点 二维差分 LeetCode2132. 用邮票贴满网格图 给你一个 m x n 的二进制矩阵 grid ,每个格子要么为 0 (空)要么为 1 (被占据)。 给你邮票的尺寸为 stampHeight x stampWidth 。我们想将邮票贴进二进制矩…...
【前端项目笔记】2 主页布局
主页布局 element-ui提供的组件名称就是它的类名 ☆☆ CSS选择器: (1)基本选择器 类型选择器 p/span/div…… 类选择器 (.classname) ID选择器 (#idname) 通配选择器 ( * ) (2)属性选择器 选择具有特定属性或属性值的…...

t265 jetpack 6 px4 ros2
Ubuntu22.04 realsenseSDK2和ROS2Wrapper安装方法,包含T265版本踩坑问题_ros2 realsense-CSDN博客 210 git clone https://github.com/IntelRealSense/librealsense.git 212 git branch 215 git tag 218 git checkout v2.51.1 219 git branch 265 git clone https://…...
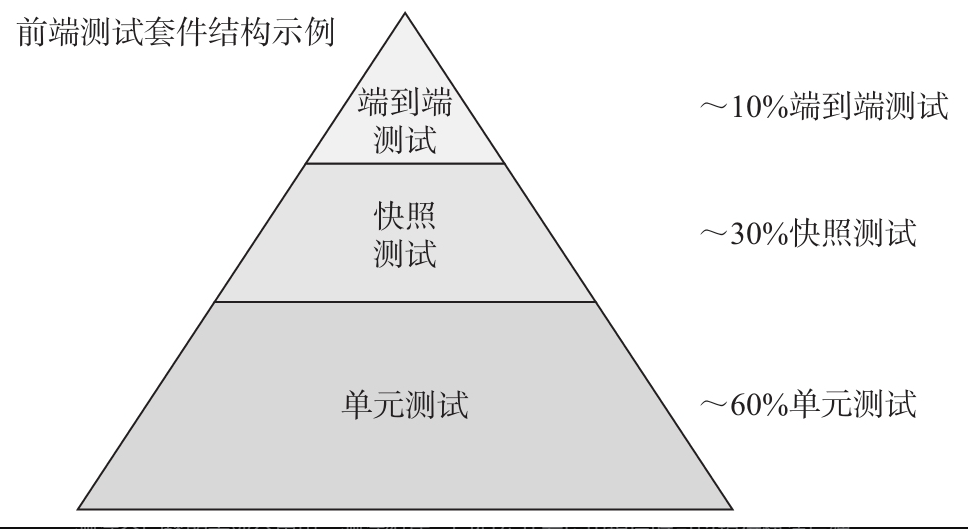
vue 应用测试(一) --- 介绍
vue 应用测试(一) ---介绍 前端测试简介组件测试Jest 测试框架简介其他测试框架 第一个测试避免误报如何组织测试代码 组件挂载Vue2 组件挂载的方式Vue3 的挂载方式vue-test-utils挂载选项 如何调试测试用例参考小结 前端测试简介 软件测试:…...

Perl 语言入门学习
一、介绍 Perl 是一种高级的、动态的、解释型的通用编程语言,由Larry Wall于1987年开发。它是一种非常灵活和强大的语言,广泛用于文本处理、系统管理、网络编程、图形编程等领域。 Perl 语言的设计理念是“用一种简单的语法,去解决复杂的编…...

HarmongOS打包[保姆级]
创建应用 首先进入 华为开发者联盟-HarmonyOS开发者官网 然后进行登录。 登录成功后,鼠标悬停在在登录右上角那个位置后再点击管理中心,进入下面这个界面。 再点击:应用服务–>应用发布–>新建–>完善信息 构建和生成私钥和证书请求…...

SpringBoot怎么实现自定义接口全局异常捕获?详细教程
自定义异常 package com.single.bean;import org.springframework.core.NestedRuntimeException;public class FDWException extends NestedRuntimeException {private static final long serialVersionUID = 6046035491210083235L;public FDWException(String msg) {super(msg…...
Ms08067安全实验室成功实施多家业务系统渗透测试项目
点击星标,即时接收最新推文 近日,Ms08067安全实验室针对多家公司重要系统实施渗透测试项目。公司网络信息系统的业务应用和存储的重要信息资产均较多,存在网络系统结构的复杂性和庞杂等特点,使得公司网络信息系统面临一定风险。项…...

小熊家政帮day22-day23 订单系统优化(订单状态机、练习分库分表、索引、订单缓存)
目录 1 状态机1.1 状态机介绍1.1.1 当前存在的问题1.1.2 使用状态机解决问题 1.2 实现订单状态机1.2.1 编写订单状态机1.2.1.1 依赖引入1.2.1.2 订单状态枚举类1.2.1.3 状态变更事件枚举类1.2.1.4 定义订单快照类1.2.1.5 定义事件变更动作类1.2.1.5 定义订单状态机类1.2.1.6 状…...

LeetCode 1731, 151, 148
目录 1731. 每位经理的下属员工数量题目链接表要求知识点思路代码 151. 反转字符串中的单词题目链接标签思路代码 148. 排序链表题目链接标签Collections.sort()思路代码 归并排序思路代码 1731. 每位经理的下属员工数量 题目链接 1731. 每位经理的下属员工数量 表 表Emplo…...

Codeforces Round 953 (Div. 2)(A~D题解)
这次比赛是我最顺利的一次比赛,也是成功在中途打进前1500,写完第三道题的时候也是保持在1600左右,但是后面就啥都不会了,还吃了点罚时,虽说如此也算是看到进步了,D题学长说很简单,但是我当时分析…...
晶圆切割机(晶圆划片机)为晶圆加工重要设备 我国市场国产化进程不断加快
晶圆切割机(晶圆划片机)为晶圆加工重要设备 我国市场国产化进程不断加快 晶圆切割机又称晶圆划片机,指能将晶圆切割成芯片的机器设备。晶圆切割机需具备切割精度高、切割速度快、操作便捷、稳定性好等特点,在半导体制造领域应用广…...
39、基于深度学习的(拼音)字符识别(matlab)
1、原理及流程 深度学习中常用的字符识别方法包括卷积神经网络(CNN)和循环神经网络(RNN)。 数据准备:首先需要准备包含字符的数据集,通常是手写字符、印刷字符或者印刷字体数据集。 数据预处理࿱…...
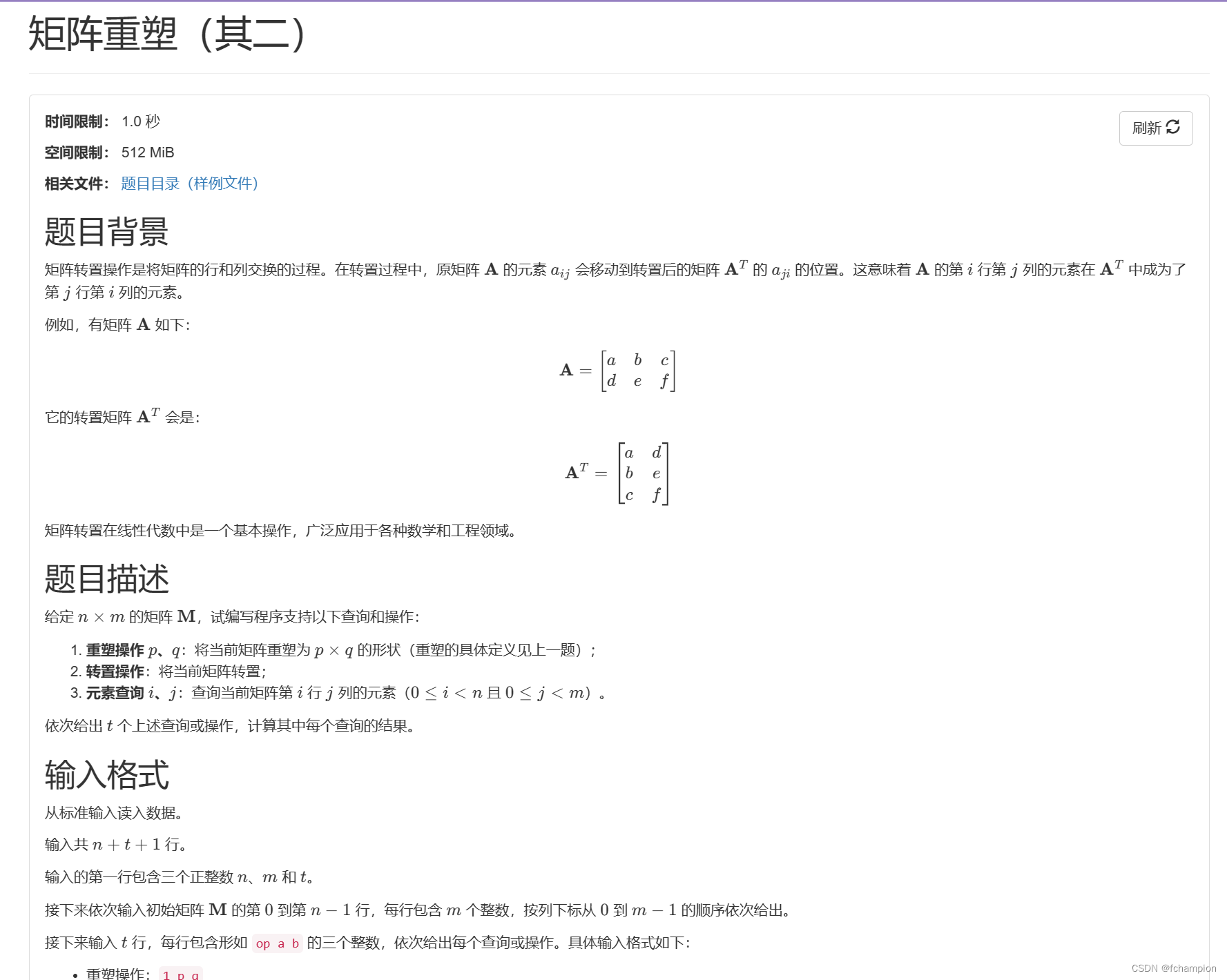
CCF 矩阵重塑
第一题:矩阵重塑(一) 本题有两种思路 第一种 (不确定是否正确 但是100分) #include<iostream> using namespace std; int main(){int n,m,p,q,i,j;cin>>n>>m>>p>>q;int a[n][m];for(i…...

Aigtek高压放大器在柔性爬行机器人驱动性能研究中的应用
实验名称:柔性爬行机器人的材料测试 研究方向:介电弹性体的最小能量结构是一种利用DE材料的电致变形与柔性框架形变相结合设计的新型柔性驱动器,所谓最小能量是指驱动器在平衡状态时整个系统的能量最小,当系统在外界的电压刺激下就…...

Postman下发流表至Opendaylight
目录 任务目的 任务内容 实验原理 实验环境 实验过程 1、打开ODL控制器 2、网页端打开ODL控制页面 3、创建拓扑 4、Postman中查看交换机的信息 5、L2层流表下发 6、L3层流表下发 7、L4层流表下发 任务目的 1、掌握OpenFlow流表相关知识,理解SDN网络中L…...
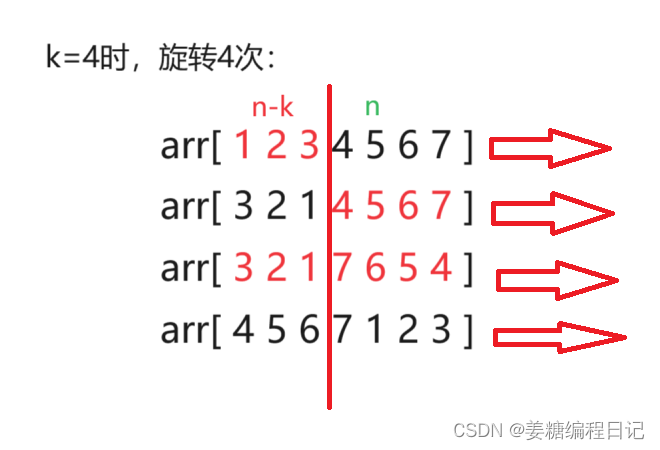
C语言王国——数组的旋转(轮转数组)三种解法
目录 一、题目 二、分析 2.1 暴力求解法 2.2 找规律 2.3 追求时间效率,以空间换时间 三、结论 一、题目 给定一个整数数组 nums,将数组中的元素向右轮转 k 个位置,其中 k 是非负数。 示例 1: 输入: nums [1,2,3,4,5,6,7], k 3 输出…...

MySQL中CAST和CONVERT函数都用于数据类型转换
在 MySQL 中,CAST() 和 CONVERT() 函数都用于数据类型转换。虽然这两个函数在大多数情况下可以互换使用,但它们之间还是有一些细微的差别。 官方文档地址 https://dev.mysql.com/doc/refman/8.4/en/cast-functions.html#function_cast CAST() 函数 C…...

速盾:cdn影响seo吗?
CDN (Content Delivery Network) 是一个分布式网络架构,用于在全球范围内加速网站内容的传输和分发。它通过将网站的静态资源(例如图片、CSS、JavaScript 文件等)存储在多个服务器上,使用户可以从最接近他们位置的服务器上获取这些…...
)
VSCode调试C++项目全攻略:从CMake工程配置到Native Debug实战(含传参技巧)
VSCode调试C项目全攻略:从CMake工程配置到Native Debug实战(含传参技巧) 在当今的C开发环境中,高效调试已成为提升生产力的关键环节。对于使用CMake管理的中大型项目,如何在VSCode中实现无缝调试体验,是许多…...

Alph:一键统一配置AI编程助手MCP服务器的命令行工具
1. 项目概述:告别手动配置的混乱时代 如果你和我一样,日常开发中同时用着 Cursor、Claude Code、Gemini CLI 这些 AI 编程助手,那你一定对下面这个场景深恶痛绝:每次想给它们接入一个新的 MCP 服务器,都得像个考古学家…...
)
告别底噪与失真:手把手教你用STM32 I2C驱动WM8988音频Codec(附完整寄存器配置代码)
嵌入式音频开发实战:WM8988音质优化全攻略 在嵌入式音频系统开发中,WM8988作为一款高性能低功耗的音频编解码芯片,因其出色的音质表现和灵活的配置选项,成为众多开发者的首选。然而,很多工程师在完成基础驱动后&#x…...

星际软件开发:为火星殖民地编写第一批代码
一、引言:当测试左移到大气层之外2041年,第一批火星殖民者即将启程。他们携带的不仅是氧气和速食,还有一座预装在密封舱里的微型数据中心。在这片红色荒漠上,代码将比氧气更早醒来——生命维持系统的控制逻辑、通讯中继的协议栈、…...

语音真实度突破98.7%的关键在哪?ElevenLabs最新v3.2引擎深度测评,附权威MOS评分对比表
更多请点击: https://intelliparadigm.com 第一章:语音真实度突破98.7%的关键在哪?ElevenLabs最新v3.2引擎深度测评,附权威MOS评分对比表 ElevenLabs v3.2 引擎在2024年Q2发布的音频合成基准测试中,首次在自然度&…...

冻|结D球 2026
通过网盘分享的文件:冻|结D球 2026 链接: https://pan.baidu.com/s/1-bhxibfD69ahEoufeQFRRQ?pwdhygv 提取码: hygv...

NodeMCU PyFlasher:ESP8266图形化固件烧录终极解决方案
NodeMCU PyFlasher:ESP8266图形化固件烧录终极解决方案 【免费下载链接】nodemcu-pyflasher Self-contained NodeMCU flasher with GUI based on esptool.py and wxPython. 项目地址: https://gitcode.com/gh_mirrors/no/nodemcu-pyflasher 对于ESP8266开发者…...

从数据模型到领域驱动设计:数据库抽象与微服务实践的演进
在软件开发的漫长历史中,如何有效地对现实世界进行建模,始终是核心挑战之一。从早期的层次数据库到当今的微服务架构,数据模型作为连接业务需求与技术实现的桥梁,经历了深刻的演变。本文基于对概念数据模型、基本数据模型和面向对象模型的系统探讨,进一步延伸到领域驱动设…...

chatgpt.js:纯客户端集成ChatGPT,构建浏览器AI应用实战
1. 项目概述:一个专为浏览器环境打造的ChatGPT交互库如果你是一名前端开发者,或者经常需要在自己的网页项目中集成智能对话功能,那么你一定对调用大型语言模型的API不陌生。传统的做法是,在自己的后端服务器上封装一个接口&#x…...
)
毕设项目分享 大数据共享单车数据分析与可视化(源码分享)
文章目录 0 前言1 课题背景2 数据清洗3 数据可视化热力图整体特征分布**查看2011-2012间的单车租借情况**天气对于租借数量的影响湿度与温度对于租借数量的影响注册用户与未注册用户 4 总结:5 最后 0 前言 🔥 这两年开始毕业设计和毕业答辩的要求和难度…...