7.2 向量的坐标
🙌作者简介:数学与计算机科学学院出身、在职高校高等数学专任教师,分享学习经验、生活、 努力成为像代码一样有逻辑的人!
🌙个人主页:阿芒的主页
⭐ 高等数学专栏介绍:本专栏系统地梳理高等数学这门课的知识点,参考书主要为经典的同济版第七版《高等数学》以及作者在高校使用的《高等数学》系统教材。梳理《高等数学》这门课,旨在帮助那些刚刚接触这门课的小白以及需要系统复习这门课的考研人士。希望自己的一些经验能够帮助更多的人。
文章目录
- 向量的坐标表示
- 利用坐标作向量的线性运算
- 向量的模、方向角、投影
向量的坐标表示
空间直角坐标系下,任意向量r→\overrightarrow{r}r可用向径OM→\overrightarrow{OM}OM表示.
以i→\overrightarrow{i}ij→\overrightarrow{j}jk→\overrightarrow{k}k分别表示x、y、zx、y、zx、y、z轴上的单位向量,设点MMM的坐标为M(x,y,z)M(x,y,z)M(x,y,z),则
OM→\overrightarrow{OM}OM=r→\overrightarrow{r}r=xi→+yj→+zk→x\overrightarrow{i}+y\overrightarrow{j}+z\overrightarrow{k}xi+yj+zk 称为向量r→\overrightarrow{r}r的坐标分解式.
xi→,yj→,zk→x\overrightarrow{i},y\overrightarrow{j},z\overrightarrow{k}xi,yj,zk称为向量r→\overrightarrow{r}r沿三个坐标轴方向的分向量.
利用坐标作向量的线性运算
设a→=(ax,ay,az),b→=(bx,by,bz)\overrightarrow{a}=(a_{x},a_{y},a_{z}),\overrightarrow{b}=(b_{x},b_{y},b_{z})a=(ax,ay,az),b=(bx,by,bz),λ{\lambda}λ为实数,则
a→±b→\overrightarrow{a}\pm\overrightarrow{b}a±b=(ax±bx,ay±by,az±bz)(a_{x}\pm b_{x}, a_{y}\pm b_{y},a_{z}\pm b_{z})(ax±bx,ay±by,az±bz)
λa→\lambda\overrightarrow{a}λa=(λax,λay,λaz)(\lambda a_{x},\lambda a_{y},\lambda a_{z})(λax,λay,λaz)
平行向量对应坐标成比例:
当a→≠0→\overrightarrow{a}\neq\overrightarrow{0}a=0时,
a→∥b→\overrightarrow{a}\parallel\overrightarrow{b}a∥b ⟺\Longleftrightarrow⟺b→\overrightarrow{b}b=λa→\lambda\overrightarrow{a}λa(λ\lambdaλ为唯一 实数).
~~~~~~~~~~~~ ⟺\Longleftrightarrow⟺ bxax\frac{{b_{x}}}{a_{x}}axbx=byay\frac{{b_{y}}}{a_{y}}ayby=bzaz\frac{{b_{z}}}{a_{z}}azbz
向量的模、方向角、投影
-
向量的模与两点间的距离公式
-
向量的模
设r→=(x,y,z)\overrightarrow{r}=(x,y,z)r=(x,y,z),作OM→\overrightarrow{OM}OM=r→\overrightarrow{r}r,则有 ∣r→∣=∣OM→∣=x2+y2+z2|\overrightarrow{r}|=|\overrightarrow{OM}| =\sqrt{x^{2}+y^{2}+z^{2}}∣r∣=∣OM∣=x2+y2+z2 -
两点间的距离公式
设A(x1,y1,z1)A(x_{1},y_{1},z_{1})A(x1,y1,z1),B(x2,y2,z2)B(x_{2},y_{2},z_{2})B(x2,y2,z2),因为
AB→\overrightarrow{AB}AB= OB→\overrightarrow{OB}OB-OA→\overrightarrow{OA}OA=(x2−x1,y2−y1,z2−z1)(x_{2}-x_{1},y_{2}-y_{1},z_{2}-z_{1})(x2−x1,y2−y1,z2−z1),得两点间的距离公式:
∣AB∣|{AB}|∣AB∣ =∣AB→∣|\overrightarrow{AB}|∣AB∣=(x2−x1)2+(y2−y1)2+(z2−z1)2\sqrt{(x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}+(z_{2}-z_{1})^{2}}(x2−x1)2+(y2−y1)2+(z2−z1)2 -
方向角与方向余弦
-
方向角
设有两非零向量 a→\overrightarrow{a}a,b→\overrightarrow{b}b,任取空间一点O, 作OA→\overrightarrow{OA}OA=a→\overrightarrow{a}a, OB→\overrightarrow{OB}OB=b→\overrightarrow{b}b 称φ=∠AOB(0≤φ≤π)\varphi=∠AOB(0 \leq \varphi \leq \pi)φ=∠AOB(0≤φ≤π)为向量a→\overrightarrow{a}a,b→\overrightarrow{b}b 的夹角.
类似可定义向量与轴,轴与轴的夹角.
给定 r→=(x,y,z)≠0→\overrightarrow{r}=(x,y,z)\neq\overrightarrow{0}r=(x,y,z)=0,称 r→\overrightarrow{r}r与三坐标轴的夹角α,β,γ\alpha,\beta,\gammaα,β,γ为其方向角 -
方向余弦
方向角的余弦称为方向余弦
cosαcos\alphacosα= x∣r→∣\frac{x}{|\overrightarrow{r}|}∣r∣x=xx2+y2+z2\frac{x}{ \sqrt{x^{2}+y^{2}+z^{2} }}x2+y2+z2x
cosβcos\betacosβ= y∣r→∣\frac{y}{|\overrightarrow{r}|}∣r∣y=yx2+y2+z2\frac{y}{ \sqrt{x^{2}+y^{2}+z^{2} }}x2+y2+z2y
cosγcos\gammacosγ= z∣r→∣\frac{z}{|\overrightarrow{r}|}∣r∣z=zx2+y2+z2\frac{z}{ \sqrt{x^{2}+y^{2}+z^{2} }}x2+y2+z2z
-
方向余弦的性质
cos2αcos^{2}\alphacos2α+cos2βcos^{2}\betacos2β+cos2γcos^{2}\gammacos2γ=1
向量r→\overrightarrow{r}r的单位向量:r→°=r→∣r→∣\overrightarrow{r}^{°}=\frac{\overrightarrow{r}}{|\overrightarrow{r}|}r°=∣r∣r=(cosα,cosβ,cosγ)(cos\alpha,cos\beta,cos\gamma)(cosα,cosβ,cosγ) -
向量在轴上的投影
-
空间一点在轴上的投影
过点AAA作轴uuu的垂直平面,交点A′A^{'}A′即为点AAA在轴uuu上的投影. -
向量在轴上的投影
设有一轴uuu,e→\overrightarrow{e}e是轴uuu上与uuu轴同向的单位向量.
已知向量AB→\overrightarrow{AB}AB的起点AAA和BBB在轴uuu上的投影分别为A′A^{'}A′和B′B^{'}B′,则A′B′→\overrightarrow{A^{'}B^{'}}A′B′称为AB→\overrightarrow{AB}AB在轴uuu上的分向量.
若A′B′→=λe→\overrightarrow{A^{'}B^{'}}={\lambda}\overrightarrow{e}A′B′=λe,则λ{\lambda}λ称为AB→\overrightarrow{AB}AB在轴uuu上的投影.
向量AB→\overrightarrow{AB}AB在轴uuu上的投影记为PrjuAB→Prj_{u}\overrightarrow{AB}PrjuAB或 (AB→)u(\overrightarrow{AB})_{u}(AB)u.
注:若a→=(ax,ay,az)\overrightarrow{a}=(a_{x},a_{y},a_{z})a=(ax,ay,az),则
ax=Prjxa→,ay=Prjya→,az=Prjza→a_{x}=Prj_{x}\overrightarrow{a},a_{y}=Prj_{y}\overrightarrow{a},a_{z}=Prj_{z}\overrightarrow{a}ax=Prjxa,ay=Prjya,az=Prjza
- 向量的投影性质
①投影性质1
向量AB→\overrightarrow{AB}AB在轴uuu上的投影等于向量的模乘以轴与向量的夹角的余弦:
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ PrjuAB→Prj_{u}\overrightarrow{AB}PrjuAB=∣AB→∣cosφ|\overrightarrow{AB}|cos\varphi∣AB∣cosφ
②投影性质2
两个向量的和在轴上的投影等于两个向量在该轴上的投影之和.(可推广到任意有限个)
~~~~~~~~~~~~~~~~~~~~~~ Prju(a→1+a→2)Prj_{u}(\overrightarrow{a}_{1}+\overrightarrow{a}_{2})Prju(a1+a2)=Prjua→1+Prjua→2Prj_{u}\overrightarrow{a}_{1}+Prj_{u}\overrightarrow{a}_{2}Prjua1+Prjua2
③投影性质3
~~~~~~~~~~~~~~~~~~~~~~ Prju(λa→)Prj_{u}(\lambda\overrightarrow{a})Prju(λa)=λPrjua→\lambda Prj_{u}\overrightarrow{a}λPrjua
相关文章:

7.2 向量的坐标
🙌作者简介:数学与计算机科学学院出身、在职高校高等数学专任教师,分享学习经验、生活、 努力成为像代码一样有逻辑的人! 🌙个人主页:阿芒的主页 ⭐ 高等数学专栏介绍:本专栏系统地梳理高等数学…...

公式编写1000问21-22
21.问: 求助——(周,日,60分钟,30分钟)MACD同时向上的公式怎么表达 答(知无不言): z:“macd.dea#week”; r:“macd.dea#day”; f:“macd.dea#min60”; f1:“macd.dea#min30”; rz:“macd.dea##week”; rr:“macd.dea##day”; rf:“…...

1041 考试座位号
每个 PAT 考生在参加考试时都会被分配两个座位号,一个是试机座位,一个是考试座位。正常情况下,考生在入场时先得到试机座位号码,入座进入试机状态后,系统会显示该考生的考试座位号码,考试时考生需要换到考试…...

2023年3月北京/广州/杭州/深圳数据治理工程师认证DAMA-CDGA/CDGP
DAMA认证为数据管理专业人士提供职业目标晋升规划,彰显了职业发展里程碑及发展阶梯定义,帮助数据管理从业人士获得企业数字化转型战略下的必备职业能力,促进开展工作实践应用及实际问题解决,形成企业所需的新数字经济下的核心职业…...
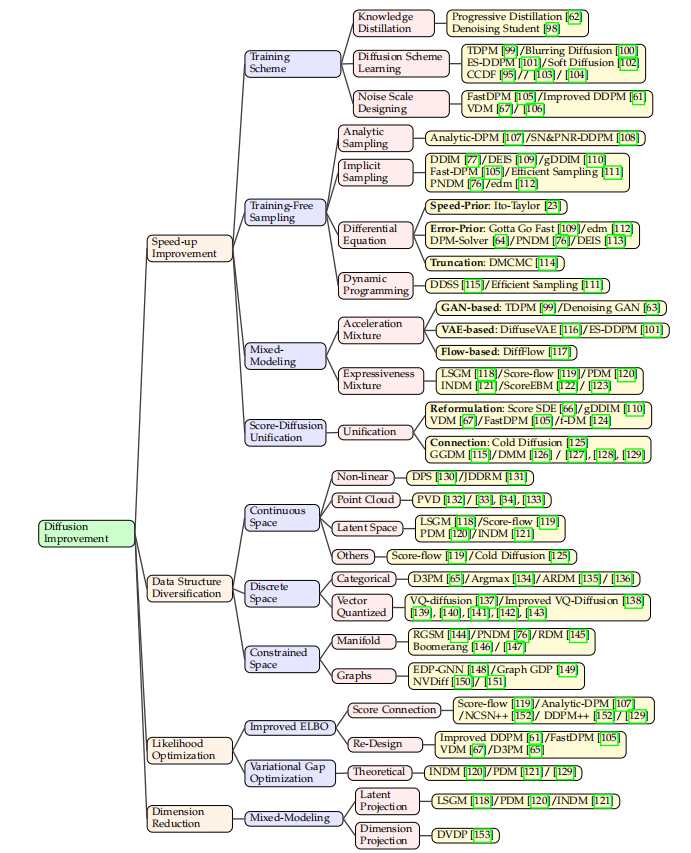
【AICG】2、扩散模型 | 到底什么是扩散模型?
文章目录一、什么是扩散模型二、扩散模型相关定义2.1 符号和定义2.2 问题规范化三、可以提升的点参考论文:A Survey on Generative Diffusion Model github:https://github.com/chq1155/A-Survey-on-Generative-Diffusion-Model 一、什么是扩散模型 已…...

高等数学——多元函数微分学
文章目录多元函数微分学多元函数的极限多元函数的连续性偏导数定义高阶偏导数全微分定义全微分存在的必要条件全微分存在的充分条件多元函数的微分法复合函数微分法隐函数微分法多元函数的极值与最值无约束极值条件极值及拉格朗日乘数法最大值最小值二重积分概念性质计算利用直…...

一文打通Sleuth+Zipkin 服务链路追踪
1、为什么用 微服务架构是一个分布式架构,它按业务划分服务单元,一个分布式系统往往有很多个服务单元。由于服务单元数量众多,业务的复杂性,如果出现了错误和异常,很难去定位。主要体现在,一个请求可能需要…...
牛客刷题第一弹
1.异常处理 都是Throwable的子类: ①.Exception(异常):是程序本身可以处理的异常。 ②.Error(错误): 是程序无法处理的错误。这些错误表示故障发生于虚拟机自身、或者发生在虚拟机试图执行应用时,一般不需…...
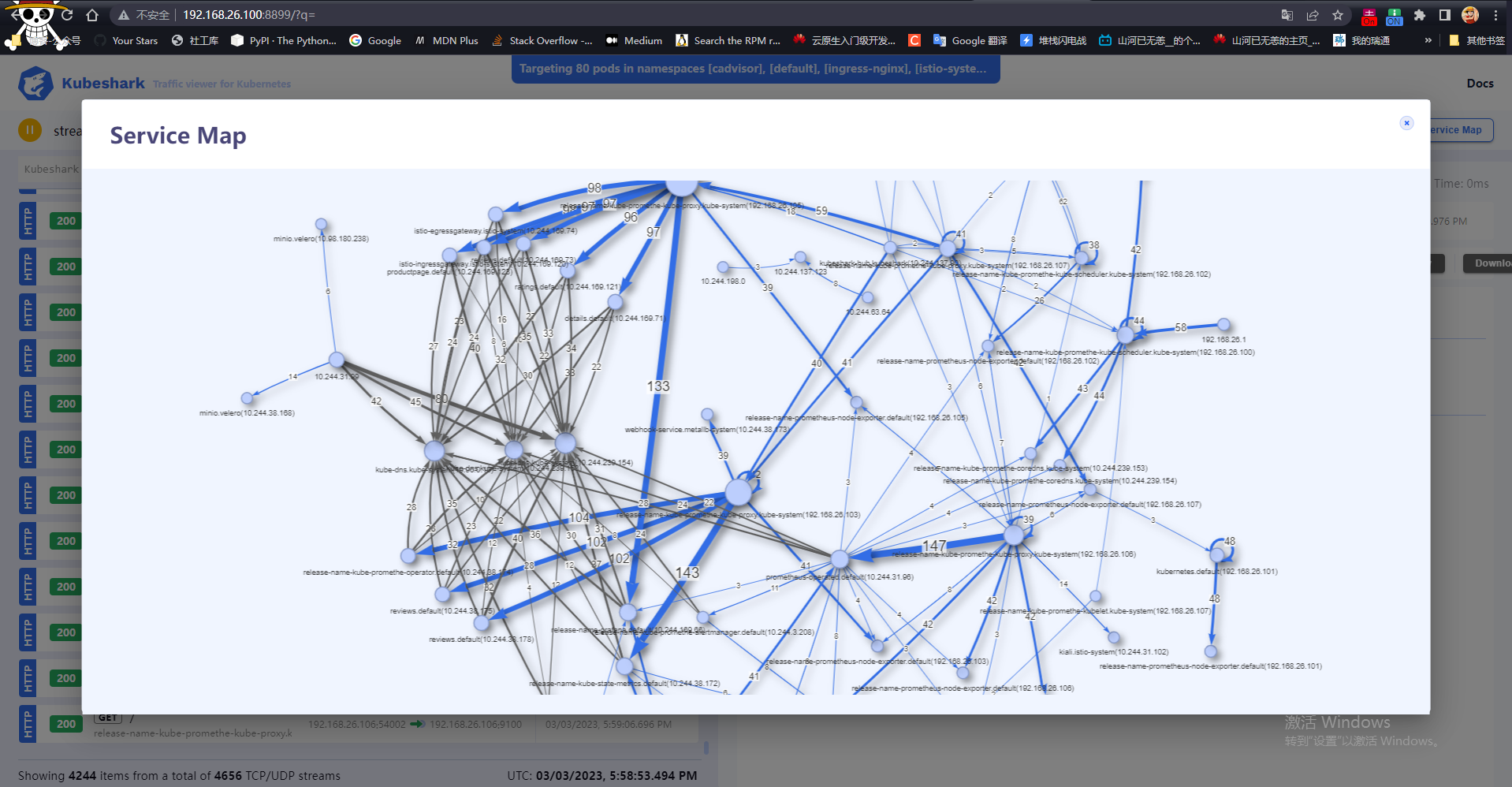
K8s:通过 Kubeshark 体验 大白鲨(Wireshark)/TCPDump 监控 Kubernetes 集群
写在前面 分享一个 k8s 集群流量查看器很轻量的一个工具,监控方便博文内容涉及: Kubeshark 简单介绍Windows、Linux 下载运行监控DemoKubeshark 特性功能介绍 理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。…...
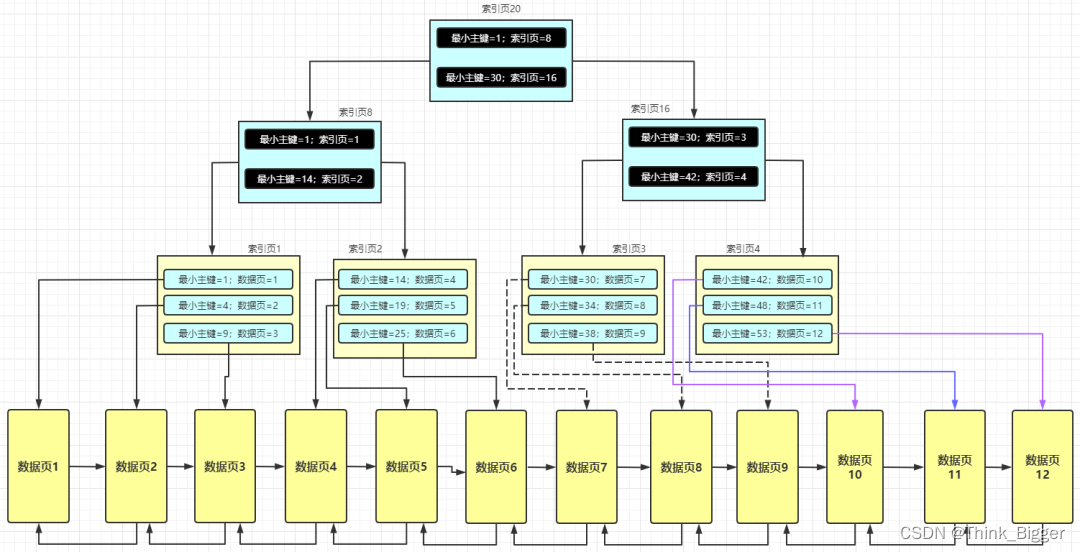
MySQL查询索引原则
文章目录 等值匹配原则最左前缀匹配原则范围查找规则等值匹配+范围查找Order By + limit 优化分组查询优化总结MySQL 是如何帮我们维护非主键索引的等值匹配原则 我们现在已经知道了如果是【主键索引】,在插入数据的时候是根据主键的顺序依次往后排列的,一个数据页不够就会分…...

布谷鸟优化算法C++
#include <iostream> #include <vector> #include <cmath> #include <random> #include <time.h> #include <fstream> #define pi acos(-1) //5只布谷鸟 constexpr int NestNum 40; //pi值 //规定X,Y 的取值范围 constexpr double X_…...
三体到底是啥?用Python跑一遍就明白了
文章目录拉格朗日方程推导方程组微分方程算法化求解画图动图绘制温馨提示,只想看图的画直接跳到最后一节拉格朗日方程 此前所做的一切三体和太阳系的动画,都是基于牛顿力学的,而且直接对微分进行差分化,从而精度非常感人…...

Golang-Hello world
目录 安装 Go(如果尚未安装) 编写Hello world 使用Golang的外部包 自动下载需要的外部包...

this指针C++
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练,题解C,C的使用文章 🔥座右铭:“不要等到什么都没有了,才下定决心去做” …...
SpringBoot+WebSocket实时监控异常
# 写在前面此异常非彼异常,标题所说的异常是业务上的异常。最近做了一个需求,消防的设备巡检,如果巡检发现异常,通过手机端提交,后台的实时监控页面实时获取到该设备的信息及位置,然后安排员工去处理。因为…...
Baumer工业相机堡盟相机如何使用自动曝光功能(自动曝光优点和行业应用)(C++)
项目场景 Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。 Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…...
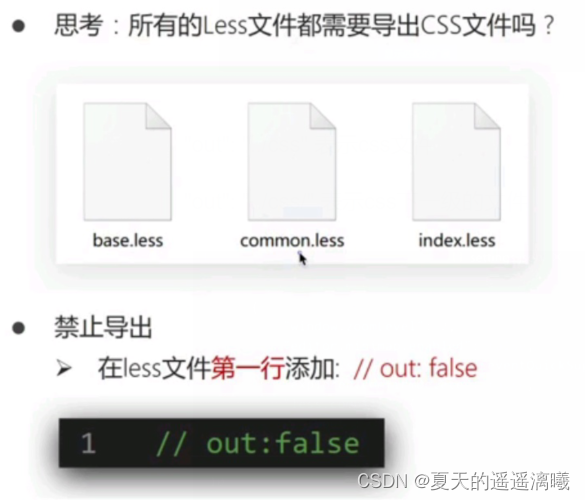
HTML、CSS学习笔记7(移动适配:rem、less)
一、移动适配 rem:目前多数企业在用的解决方案vw / vh:未来的解决方案 1.rem(单位) 1.1使用rem单位设置尺寸 px单位或百分比布局可以实现吗? ————不可以 网页的根字号——HTML标签 1.2.rem移动适配 写法&#x…...
STM32感应开关盖垃圾桶
目录 项目需求 项目框图 编辑 硬件清单 sg90舵机介绍及实战 sg90舵机介绍 角度控制 SG90舵机编程实现 超声波传感器介绍及实战 超声波传感器介绍 超声波编程实战 项目设计及实现 项目需求 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖…...

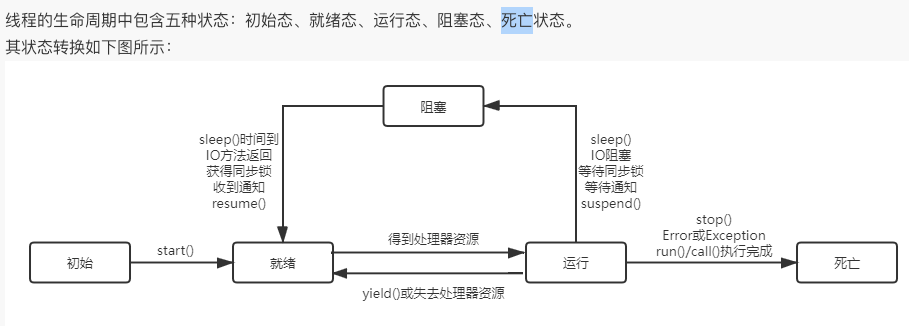
进程跟线程的区别
进程跟线程的区别 文章目录进程跟线程的区别前言一.什么线程二.线程与进程的联系三.线程与进程有什么不同前言 现代所有计算机都能同时做几件事情,当一个用户程序正在运行时,计算机还能同时读取磁盘,并向屏幕打印输出正文.在一个多道操作程序中,cpu由一道程序向另外一道程的切…...

[ICLR 2016] Unsupervised representation learning with DCGANs
目录 IntroductionModel ArchitectureReferencesIntroduction 作者提出了用 CNN 搭建 GAN,使得 GAN 训练更加稳定的一系列准则,并将满足这些设计理念的模型称为 DCGANs (Deep Convolutional GANs). 此外,作者将 trained discriminators 用于图像分类任务,相比于其他无监督算…...

本地AI智能体框架NagaAgent:基于开源大模型的规划与工具调用实践
1. 项目概述:一个被低估的本地AI智能体框架最近在折腾本地大模型应用,特别是想搞点能自己跑起来的智能体(Agent),发现了一个挺有意思但讨论度不高的项目——RTGS2017/NagaAgent。乍一看这个标题,可能会觉得…...

云原生存储优化:优化云原生环境的存储性能
云原生存储优化:优化云原生环境的存储性能 一、云原生存储优化概述 1.1 云原生存储优化的定义 云原生存储优化是指通过优化存储架构、配置和使用方式,提高云原生环境中存储的性能、可靠性和成本效益的过程。 1.2 云原生存储优化的价值 性能提升ÿ…...

openclaw gateway网关运行详解
📘 Gateway 网关运行手册 — 关键内容与操作流程 1) Gateway 是什么 Gateway 网关服务 是一款长期运行的进程,用于处理连接控制、事件平面,与底层 Baileys / Telegram 等协议对接,为客户端提供 RPC/HTTP 接口。它自身启动后持续运…...

从AceForge看一体化AI平台:如何实现模型部署与运维的平民化
1. 项目概述:从“AceForge”看开源AI工具链的平民化革命最近在GitHub上闲逛,发现一个叫“AceForge”的项目,作者是sudokrang。点进去一看,简介写得挺有意思,大意是说这是一个“一站式、开箱即用的AI应用开发与部署平台…...

为什么“忘记密码“只能重置不能找回?背后藏着一个精妙的数学秘密
99%的人每天都在用它,却从来不知道它的存在你一定遇到过这种事:忘了某个网站的密码,点击"找回密码",结果网站只让你"重置密码"——它为什么不能直接告诉你原来的密码是什么?答案可能出乎你的意料&…...

量子退火在锂离子电池材料优化中的应用与原理
1. 量子退火技术原理与材料优化应用概述量子退火(Quantum Annealing)是一种基于量子力学原理的优化算法,它通过模拟量子系统的绝热演化过程来寻找复杂问题的全局最优解。与传统模拟退火算法相比,量子退火利用量子隧穿效应而非热涨…...
)
保姆级教程:用WorkVisual 6.0从零搭建KUKA机器人控制系统(含项目分析避坑)
保姆级教程:用WorkVisual 6.0从零搭建KUKA机器人控制系统(含项目分析避坑) 刚接触KUKA机器人的工程师,面对复杂的控制系统搭建往往无从下手。WorkVisual作为KUKA官方开发环境,其6.0版本在工业机器人领域已成为主流配置…...

从Arduino官网的‘eagle-files’说起:给硬件新手的Autodesk Eagle PCB设计入门指南
从Eagle文件到PCB设计:开源硬件爱好者的实战入门指南 在开源硬件社区里,Arduino项目的"eagle-files"文件夹常常让新手感到困惑又好奇。这些文件背后隐藏着一个强大的工具链——Autodesk Eagle,它是欧美开源硬件生态中PCB设计的通用…...

从锡疫到无铅焊料失效:材料环境可靠性设计实战解析
1. 从拿破仑的纽扣说起:材料失效背后的工程警示在电子工程领域,我们每天都在与材料打交道。从PCB上的焊点,到芯片内部的金属互连,再到外壳的塑料,材料的可靠性直接决定了产品的成败。几年前,当整个行业因Ro…...

castAR混合现实头显:从光学投影到空间锚定的技术解析
1. 项目概述:从Kickstarter到技术现实,castAR的独特魅力2013年,当Oculus Rift在虚拟现实领域掀起第一波热潮时,一封来自技术爱好者的邮件,将一个名为castAR的项目推到了我的视野中心。这不仅仅是一个头戴显示设备&…...