自动驾驶仿真:Carsim转向传动比设置
文章目录
- 一、转向传动比概念
- 二、设置转向传动比
- 1、C factor概念
- 2、Steer Kinematics概念
- 3、传动比计算公式
- 三、转向传动比验证
一、转向传动比概念
转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。公式如下:
转向传动比 = 方向盘转动角度 车轮转动角度 \text{转向传动比} = \frac{\text{方向盘转动角度}}{\text{车轮转动角度}} 转向传动比=车轮转动角度方向盘转动角度
例如,假设方向盘转动 360 度,而车轮转动 30 度,那么转向传动比为:
转向传动比 = 36 0 ∘ 3 0 ∘ = 12 : 1 \text{转向传动比} = \frac{360^\circ}{30^\circ} = 12:1 转向传动比=30∘360∘=12:1
二、设置转向传动比
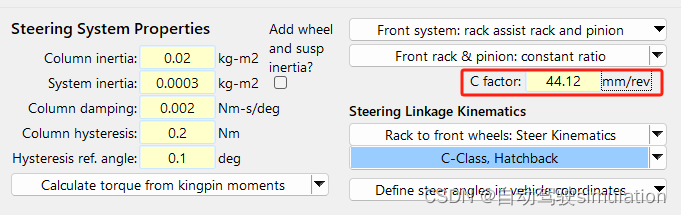
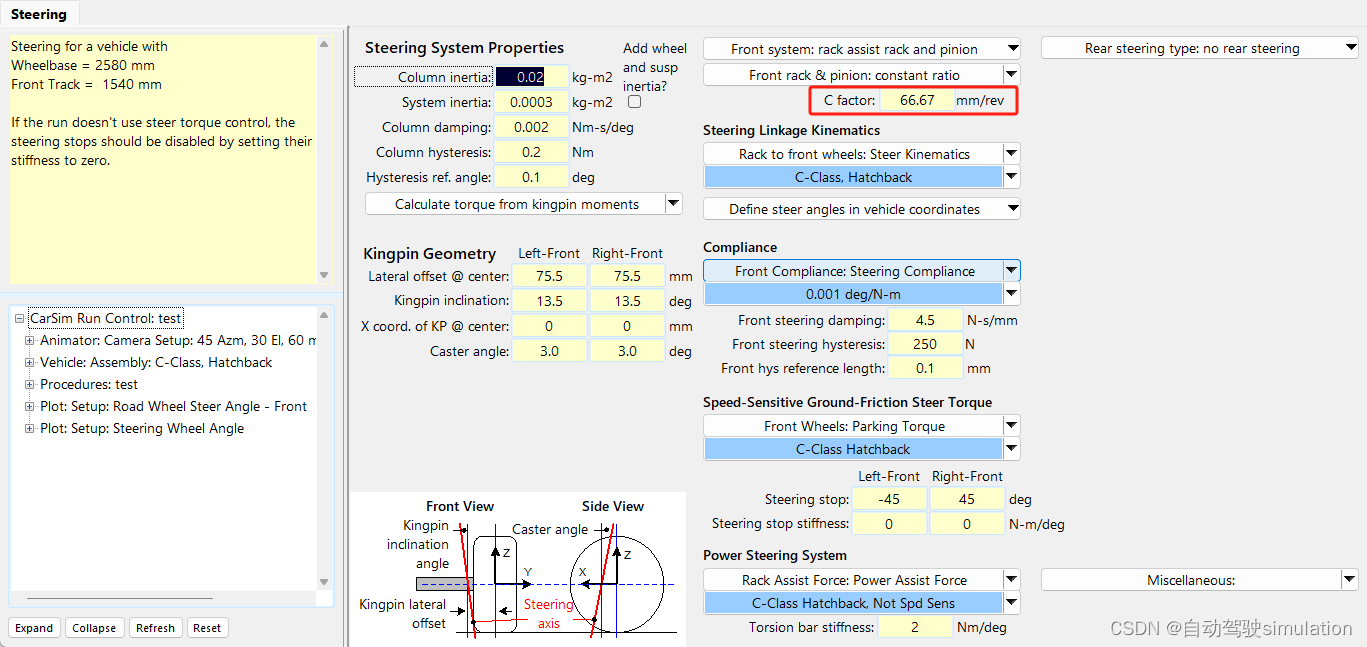
1、C factor概念
C factor : 方向盘转一圈齿条移动的位移 \text{C factor} : {\text{方向盘转一圈齿条移动的位移}} C factor:方向盘转一圈齿条移动的位移
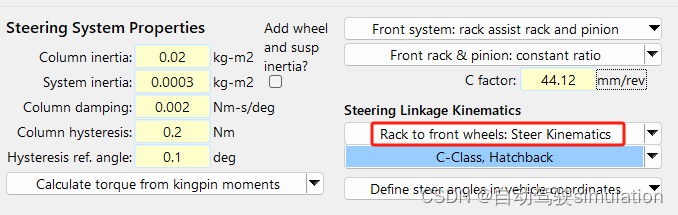
2、Steer Kinematics概念
Rack to front wheels: Steer Kinematics : 齿条位移和前轮转角之间的关系 \text{Rack to front wheels: Steer Kinematics} : {\text{齿条位移和前轮转角之间的关系}} Rack to front wheels: Steer Kinematics:齿条位移和前轮转角之间的关系
3、传动比计算公式
1)由于Carsim中没有直接设置转向传动比的关系,在Carsim中计算传动比的关系式如下:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} = 1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
注意:这里需要c factor / 360,因为要将rev转换成deg;
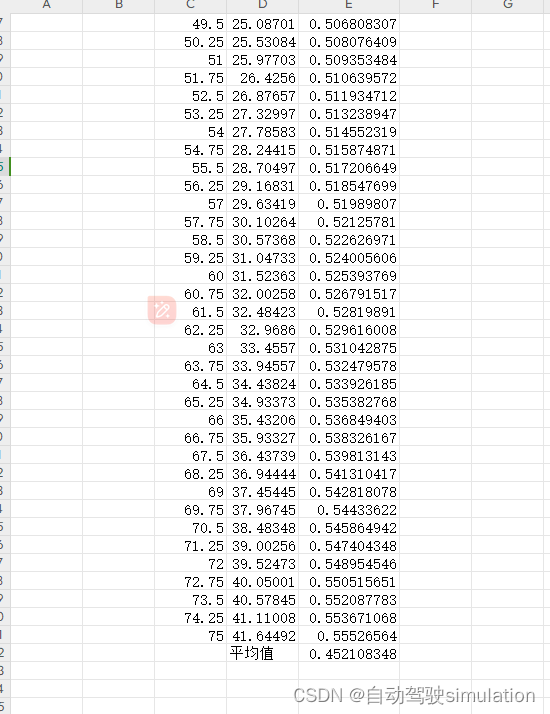
2)假设取左前轮斜率的平均值,得Steer Kinematics(平均) = 0.45 (deg/mm);
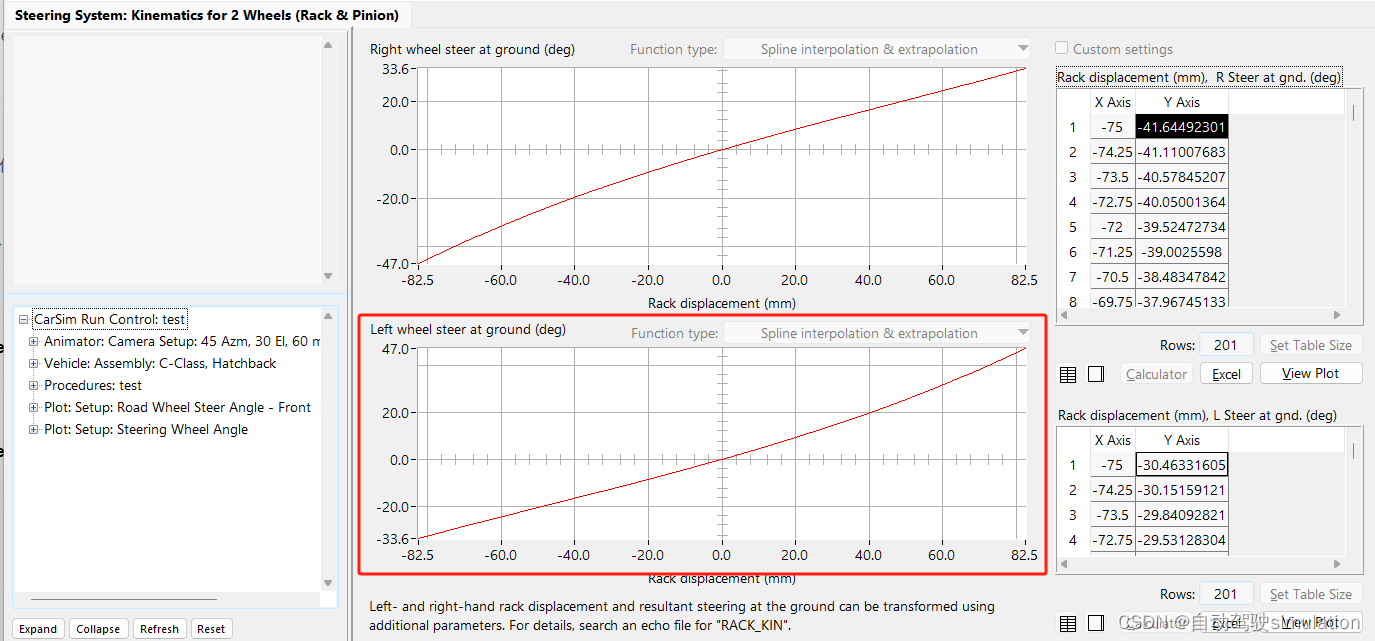
计算Steer Kinematics平均值:
3)假设你需要的传动比是12,推导得:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 12=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ 0.452 ) 得 : C f a c t o r ≈ 66.67 ( m m / r e v ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{0.452}}) 得 : C factor ≈ 66.67(mm/rev) 12=1/((C factor / 360)∗0.452)得:Cfactor≈66.67(mm/rev)
三、转向传动比验证
1、由上述可得传动比为12的时候,C factor为66.67(mm/rev),代入carsim:
2、设置方向盘输出角度为120deg,由于12 = 传动比 = 方向盘角度 / 前轮转角,因此前轮转角大概为10deg左右;
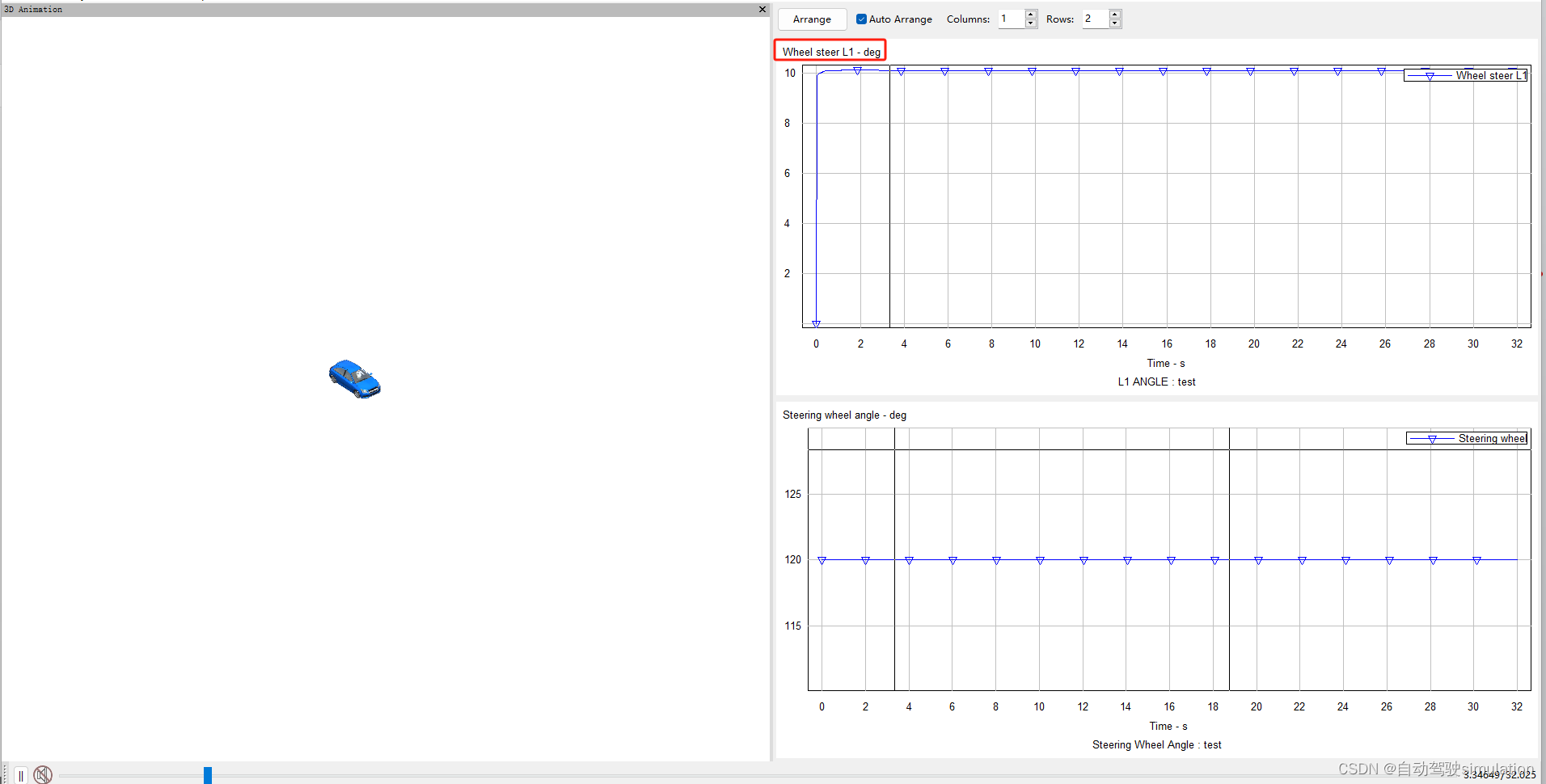
曲线结果符合预期,因此公式正确;
相关文章:
自动驾驶仿真:Carsim转向传动比设置
文章目录 一、转向传动比概念二、设置转向传动比1、C factor概念2、Steer Kinematics概念3、传动比计算公式 三、转向传动比验证 一、转向传动比概念 转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。公式如下: 转向…...
 交叉熵损失函数详解和要点提醒)
PyTorch nn.CrossEntropyLoss() 交叉熵损失函数详解和要点提醒
文章目录 前置知识nn.CrossEntropyLoss() 交叉熵损失参数数学公式带权重的公式(weight)标签平滑(label_smoothing) 要点 附录参考链接 前置知识 深度学习:关于损失函数的一些前置知识(PyTorch Loss&#x…...

DW学习笔记|数学建模task2
本章主要涉及到的知识点有: 微分方程的解法如何用 Python 解微分方程偏微分方程及其求解方法微分方程的基本案例差分方程的求解数值计算方法元胞自动机 2.1 微分方程的理论基础 微分方程是什么?如果你参加过高考,可能在高三备考中遇到过这…...
【大数据 复习】第9章 数据仓库分析工具Hive
一、概念 1.概述 (1)Hive是一个构建于Hadoop顶层的数据仓库工具。 (2)某种程度上可以看作是用户编程接口,本身不存储和处理数据。 (3)依赖分布式文件系统HDFS存储数据。 (4…...
ionic7 从安装 到 项目启动最后打包成 apk
报错处理 在打包的时候遇到过几个问题,这里记录下来两个 Visual Studio Code运行ionic build出错显示ionic : 无法加载文件 ionic 项目通过 android studio 打开报错 capacitor.settings.gradle 文件不存在 说明 由于之前使用的是 ionic 3,当时打包的…...
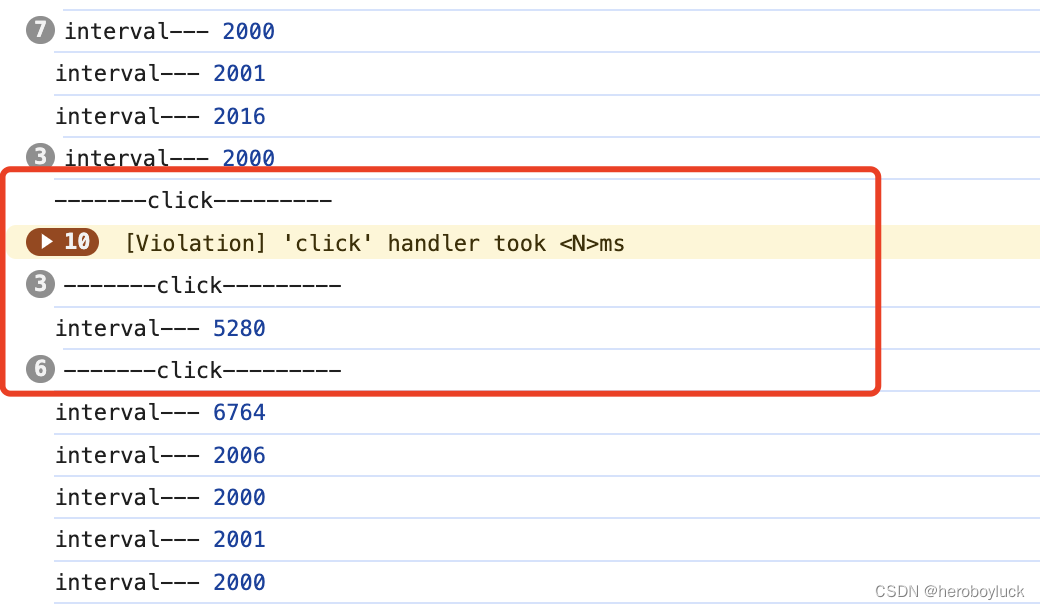
setInterval 定时任务执行时间不准验证
一般在处理定时任务的时候都使用setInterval间隔定时调用任务。 setInterval(() > {console.log("interval"); }, 2 * 1000);我们定义的是两秒执行一次,但是浏览器实际执行的间隔时间只多不少。这是由于浏览器执行 JS 是单线程模式,使用se…...

Stable Diffusion Model网站
Civitai Models | Discover Free Stable Diffusion Modelshttps://www.tjsky.net/tutorial/488https://zhuanlan.zhihu.com/p/610298913超详细的 Stable Diffusion ComfyUI 基础教程(一):安装与常用插件 - 优设网 - 学设计上优设 (uisdc.com)…...
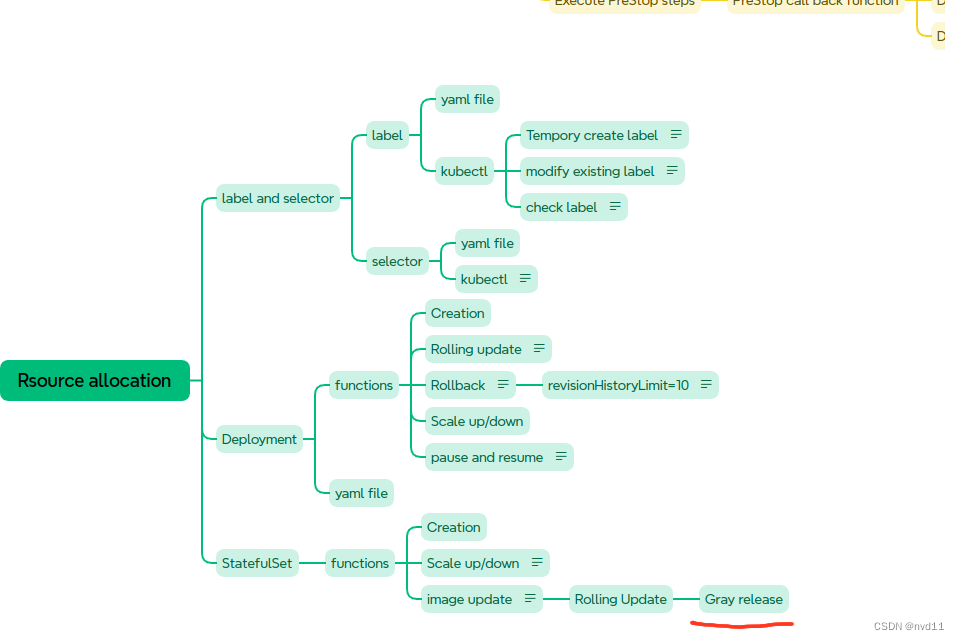
K8S - 实现statefulset 有状态service的灰度发布
什么是灰度发布 Canary Release 参考 理解 什么是 滚动更新,蓝绿部署,灰度发布 以及它们的区别 配置partition in updateStrategy/rollingUpdate 这次我为修改了 statefulset 的1个yaml file statefulsets/stateful-nginx-without-pvc.yaml: --- apiVe…...

Qt 技术博客:深入理解 Qt 中的 delete 和 deleteLater 与信号槽机制
在 Qt 开发中,内存管理和对象生命周期的处理是至关重要的一环。特别是在涉及信号和槽机制时,如何正确删除对象会直接影响应用程序的稳定性。本文将详细讨论在使用 Qt 的信号和槽机制时,delete 和 deleteLater 的工作原理,并给出最…...
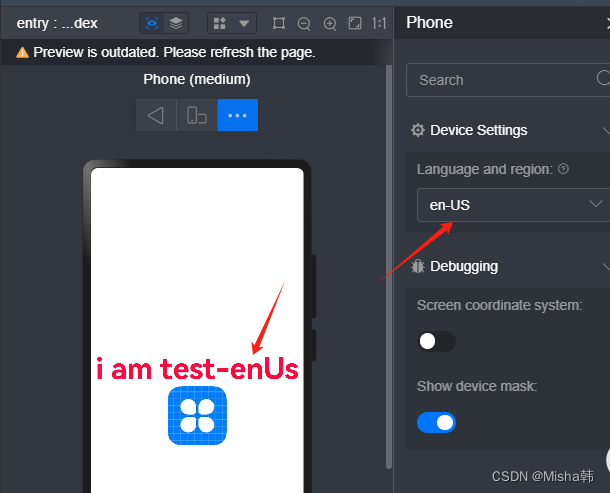
自学鸿蒙HarmonyOS的ArkTS语言<一>基本语法
一、一个ArkTs的目录结构 二、一个页面的结构 A、装饰器 Entry 装饰器 : 标记组件为入口组件,一个页面由多个自定义组件组成,但是只能有一个组件被标记 Component : 自定义组件, 仅能装饰struct关键字声明的数据结构 State:组件中的状态变量…...
)】)
【OpenGauss源码学习 —— (ALTER TABLE(列存修改列类型))】
ALTER TABLE(列存修改列类型) ATExecAlterColumnType 函数1. 检查和处理列存储表的字符集:2. 处理自动递增列的数据类型检查:3. 处理生成列的类型转换检查:4. 处理生成列的数据类型转换: build_column_defa…...
【大数据 复习】第7章 MapReduce(重中之重)
一、概念 1.MapReduce 设计就是“计算向数据靠拢”,而不是“数据向计算靠拢”,因为移动,数据需要大量的网络传输开销。 2.Hadoop MapReduce是分布式并行编程模型MapReduce的开源实现。 3.特点 (1)非共享式,…...

Zookeeper:节点
文章目录 一、节点类型二、监听器及节点删除三、创建节点四、监听节点变化五、判断节点是否存在 一、节点类型 持久(Persistent):客户端和服务器端断开连接后,创建的节点不删除。 持久化目录节点:客户端与Zookeeper断…...

生产级别的 vue
生产级别的 vue 拆分组件的标识更好的组织你的目录如何解决 props-base 设计的问题transparent component (透明组件)可减缓上述问题provide 和 inject vue-meta 在路由中的使用如何确保用户导航到某个路由自己都重新渲染?测试最佳实践如何制…...
spring-kafka(1)集成方法)
kafka(五)spring-kafka(1)集成方法
一、集成 1、pom依赖 <!--kafka--><dependency><groupId>org.apache.kafka</groupId><artifactId>kafka-clients</artifactId></dependency><dependency><groupId>org.springframework.kafka</groupId><artif…...

Java中的设计模式深度解析
Java中的设计模式深度解析 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 在软件开发领域,设计模式是一种被广泛应用的经验总结和解决方案&#x…...
鸿蒙 HarmonyOS NEXT星河版APP应用开发—上篇
一、鸿蒙开发环境搭建 DevEco Studio安装 下载 访问官网:https://developer.huawei.com/consumer/cn/deveco-studio/选择操作系统版本后并注册登录华为账号既可下载安装包 安装 建议:软件和依赖安装目录不要使用中文字符软件安装包下载完成后࿰…...
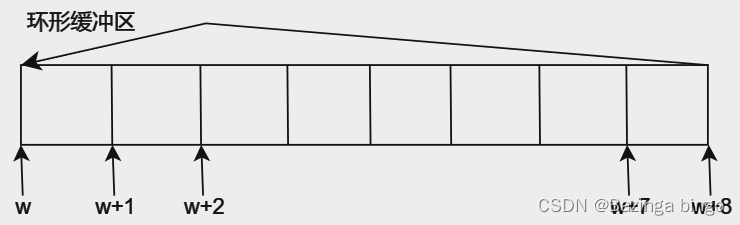
[FreeRTOS 基础知识] 互斥访问与回环队列 概念
文章目录 为什么需要互斥访问?使用队列实现互斥访问休眠和唤醒机制环形缓冲区 为什么需要互斥访问? 在裸机中,假设有两个函数(func_A, func_B)都要修改a的值(a),那么将a定义为全局变…...
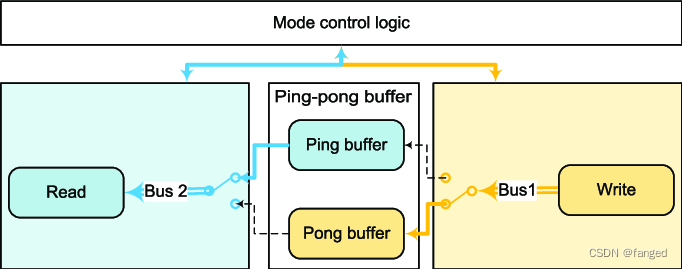
音视频的Buffer处理
最近在做安卓下UVC的一个案子。正好之前搞过ST方案的开机广告,这个也是我少数最后没搞成功的项目。当时也有点客观原因,当时ST要退出机顶盒市场,所以一切的支持都停了,当时啃他家播放器几十万行的代码,而且几乎没有文档…...

【总结】攻击 AI 模型的方法
数据投毒 污染训练数据 后门攻击 通过设计隐蔽的触发器,使得模型在正常测试时无异常,而面对触发器样本时被操纵输出。后门攻击可以看作是特殊的数据投毒,但是也可以通过修改模型参数来实现 对抗样本 只对输入做微小的改动,使模型…...
在游戏与仿真中的另类用法)
从人脸变形到地形编辑:拆解RBF(径向基函数)在游戏与仿真中的另类用法
从人脸变形到地形编辑:拆解RBF(径向基函数)在游戏与仿真中的另类用法 当游戏角色面部需要自然扭曲表情时,当虚拟地形需要实时生成连绵山脉时,图形开发者们往往面临同一个数学挑战:如何用少量控制点驱动复杂…...
-仿printf和scanf输入输出)
【免费下载】 STM32标准库-SPI-DMA收发数据-读写Flash(W25Q256JV)-仿printf和scanf输入输出
STM32标准库-SPI-DMA收发数据-读写Flash(W25Q256JV)-仿printf和scanf输入输出 【下载地址】STM32标准库-SPI-DMA收发数据-读写FlashW25Q256JV-仿printf和scanf输入输出 本项目基于STM32F429IGT6单片机,利用Keil MDK V5.32开发环境,展示了如何通过SPI接口…...

MTKClient实战手册:联发科芯片调试的5个专业技巧解决常见问题
MTKClient实战手册:联发科芯片调试的5个专业技巧解决常见问题 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient 当你的联发科设备遇到无法连接、分区读写失败或固件提取困难时&am…...

Gita异步执行机制详解:高效管理大型项目的核心技术
Gita异步执行机制详解:高效管理大型项目的核心技术 【免费下载链接】gita Manage many git repos with sanity 从容管理多个git库 项目地址: https://gitcode.com/gh_mirrors/gi/gita 在现代软件开发中,开发者经常需要同时管理多个Git仓库。随着项…...

Java OCR实战:精准提取与解析身份证信息
1. 为什么选择Java OCR处理身份证信息? 在企业级应用开发中,身份证信息录入是个高频需求场景。传统人工录入不仅效率低下,还容易出错。我去年参与过一个政务系统改造项目,工作人员每天要处理300张身份证照片,手动录入的…...

量子动态电路中的非破坏性状态快照技术解析
1. 量子动态电路中的非破坏性状态快照技术解析量子计算领域长期面临一个基础性难题:如何在不破坏量子态的前提下获取其状态信息。传统量子态层析(QST)需要大量相同量子态的副本,且测量过程会导致原始态坍缩。这项由宾夕法尼亚州立…...

PyCharm 运行 FastAPI 接口请求阻塞?竟是后台多进程残留导致
问题描述在 PyCharm 中启动 FastAPI 项目进程后,使用 Postman 发起接口请求出现明显阻塞现象,不仅请求迟迟无法得到响应,项目控制台也完全接收不到任何请求日志,接口调用彻底失效。 问题根源分析日常开发中习惯性直接关闭运行终端…...

NotebookLM摘要质量断崖式下滑?揭秘92%用户忽略的3个语义锚点校准技巧
更多请点击: https://intelliparadigm.com 第一章:NotebookLM摘要质量断崖式下滑的真相溯源 近期大量用户反馈 NotebookLM 生成的摘要出现关键信息遗漏、逻辑断裂与事实扭曲等现象,部分案例中摘要准确率较 2023 年底下降超 40%。这一退化并非…...

多智能体协同控制未来的前景和方向如何?
在AI技术快速演进的今天,单一智能体已难以满足企业复杂业务场景的需求,多智能体协同正成为行业关注的焦点,它通过多个智能体分工协作、动态交互,形成更强大、更灵活的数字员工团队,有望重塑企业运营模式,推…...

5G网络‘身份证’系统深度游:从CU/DU架构看NCI规划,以及它和4G ECGI到底有啥不同?
5G网络标识系统解构:从NCI位宽设计到CU/DU架构的范式变革 当我们在城市中穿梭时,手机屏幕上那个小小的"5G"图标背后,隐藏着一套精密的网络身份识别体系。这套系统不仅需要在上百万个基站间实现无歧义通信,还要为未来网络…...