FLASH仿真EEPROM---基于智芯Z20K11XM
一、介绍
电可擦和可编程只读存储器(EEPROM)可以对字节或字编程和擦除。EEPROM中的数据即使断电也能保持,但Z20K1xx芯片不含EEPROM。然而,闪存可以通过EEPROM仿真软件来模拟EEPROM。Z20K1xx包含两个flash阵列。编程和擦除操作可以在一个数组上进行,同时在另一个数组上执行代码。
二、存储原理
EEPROM仿真包含两个或多个扇区,每个扇区都包含一组闪存扇区。只有一个扇区被选为活动块。存储在活动扇区中的记录列表用于访问数据。每条记录都有一个ID,用来区别于其他记录。记录是一组变量。数据记录的长度是可变的。
记录按顺序编入活动扇区。为了更新记录,软件将新版本的记录写入活动扇区中下一个可用的位置。当读取记录时,软件检索具有匹配ID的最近写入的记录。当活动扇区没有足够的空间容纳新记录时,软件将活动扇区内的所有有效记录复制到其他EE扇区之一。这个新扇区成为活动扇区,之前的活动扇区失效。由于旧记录在交换期间被清除,新的活动扇区应该有空间用于记录更新。交换后,新记录将被写入新的活动扇区。 后续会详细描述,这一交换原理。
三、内存组成
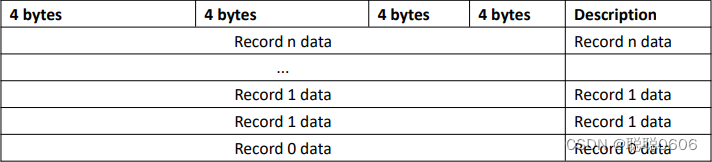
下图为扇区的内存组成列表图包含扇区+记录+数据存储区。
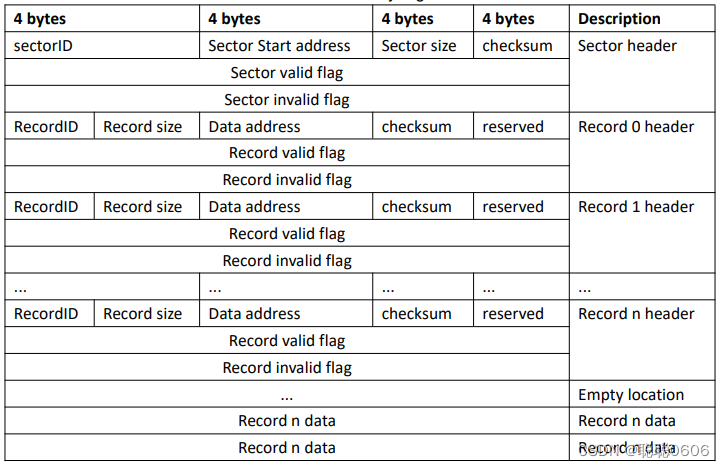
1.扇区
每个扇区包含一个扇区报头,它包括以下部分

sectorlD:扇区标识。每当有一个新的扇区,这个数字就增加1变得活跃。它从1开始。sectorlD最大的部门是活跃的部门。
sectorstart address:扇区起始地址扇区大小:扇区的大小,以字节为单位。checksum:扇区id、扇区起始地址和扇区大小字段之和。
sector valid flag:扇区的有效标志,如果等于一个特殊的值,则表示该扇区有效
sector invalid flag:扇区的无效标志,如果等于特殊值,则表示该扇区为失效。
2.记录
每条记录包含一个记录头,它包括以下部分:
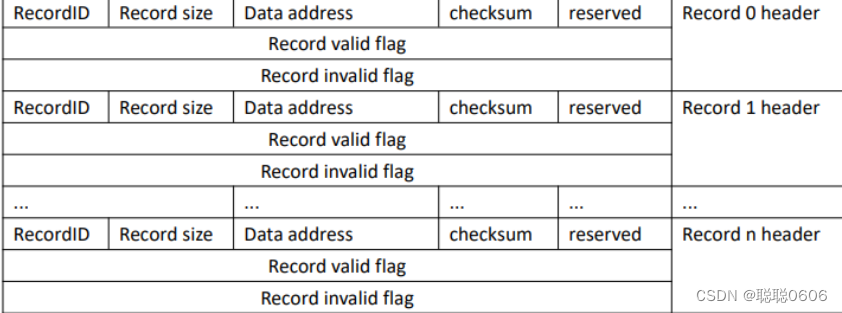
recordlD:记录的标识。
data address:记录的数据地址
record size:记录大小(以字节为单位)。
check sum:recordID、数据地址和记录大小字段之和。
record valid flag:记录的有效标志,如果它等于一个特殊值,则该记录是有效的。record invalid flag:记录的无效标志,如果它等于一个特殊值,则该记录无效。
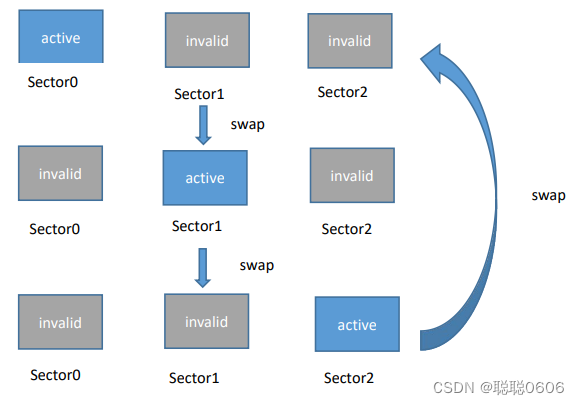
四、扇区交换
前面提到过存储的原理实际就是活动扇区的交换,实际上扇区的交换就是在活动扇区满足以下这三点时:
①当活动扇区没有足够的空间来写入新记录时
②当在EE初始化期间检测到无效记录头时(可选)。
③当最后一个记录头无效时。
把所有的有效记录从一个活动扇区复制到另一个扇区,下图举例了三个扇区的交换:
初始时,Sector0是活动扇区,
第一次交换后,Sector0变为“invalid”,Sector1变为活动扇区。
第二次交换后,Sector1变为“invalid”,Sector2变为活动扇区。
再了解了存储结构和交换原理后我们就可以理解代码并写一段demo例子了。
五、代码编程
1.结构体初始化
static uint32_t cacheTable[EE_CACHE_RECORD_NUM];
static EE_cache_t cacheConf =
{cacheTable, /* cache 起始地址 */EE_CACHE_RECORD_NUM /* cache 缓存大小 */
};/* 扇区0配置 */
static const EE_SectorConfig_t sectorConf0 =
{EE_SECTOR_0_ADDR, /* 起始地址 */EE_SECTOR_SIZE, /* 大小 */
};/* 扇区1配置 */
static const EE_SectorConfig_t sectorConf1 =
{EE_SECTOR_1_ADDR, /* 起始地址 */EE_SECTOR_SIZE, /* 大小 */
};/* 扇区2配置 */
static const EE_SectorConfig_t sectorConf2 =
{EE_SECTOR_2_ADDR, /* 起始地址 */EE_SECTOR_SIZE, /* 大小 */
};/* 扇区配置数组 */
static const EE_SectorConfig_t* sectorConfig[EE_SECTOR_NUM] =
{§orConf0,§orConf1, §orConf2,
};/* EEPROM配置 */
EE_Config_t eeConf =
{.sectorNum = EE_SECTOR_NUM, /* 扇区数量 */.sectors = sectorConfig, /* 扇区配置 */.cacheEn = ENABLE, /* cache 使能 */.cTable = &cacheConf, /* cache 结构体 */.busyFlag = RESET,.maxRecordId = EE_MAX_RECORD_ID, /* 最大记录ID */
};2.系统初始化
static void system_init(void)
{ WDOG_Config_t wdogCfg = {.winEnable = DISABLE,.wait = DISABLE,.stop = DISABLE,.debug = DISABLE,.windowValue = 0,.timeoutValue = 9600,.clkSource = WDOG_LPO_CLOCK,.testMode = WDOG_TST_NORMAL, };CLK_SetClkDivider(CLK_CORE, CLK_DIV_1);CLK_SetClkDivider(CLK_BUS, CLK_DIV_1);CLK_SetClkDivider(CLK_SLOW, CLK_DIV_8);if(ERR == WDOG_Init(&wdogCfg)){ErrorTrap();}if(ERR == WDOG_Enable()){ErrorTrap();}
}3.初始化EEPROM
EEPROM仿真初始化,最多尝试三次,错误处理判断
while ((i < 3U) && (ret != EE_OK))
{ret = EE_Init(&eeConf, ENABLE, &CallBack);i++;
}
if(ret != EE_OK)
{ErrorTrap();
}4.写入数据到EEPROM
写入数据到EEPROM,每个记录的ID从0到最大记录ID(EE_MAX_RECORD_ID),数据大小从1字节到缓冲区大小(BUFFER_SIZE),验证写入的数据,确保读取的数据与写入的数据一致。
for(id = 0U; id <= eeConf.maxRecordId; id++){size = id + 1U;if(size > BUFFER_SIZE){size = BUFFER_SIZE;}/* Init buffer*/for (i = 0; i < size; i++){buffer[i] = (uint8_t)(i + id);}ret = EE_WriteRecord(&eeConf,id, size, buffer,0, CallBack);if(ret != EE_OK){/* if writing fails, re-initialize and try again */ret = EE_Init(&eeConf, ENABLE, &CallBack);if(ret != EE_OK){ErrorTrap();}else{ret = EE_WriteRecord(&eeConf,id, size, buffer, 0, CallBack);if(ret != EE_OK){/* still error after reinitialization */ErrorTrap();}} }for (i = 0; i < BUFFER_SIZE; i++){buffer[i] = 0U;}ret = EE_ReadRecord(&eeConf,id,size,buffer,&readOutSize,CallBack);if(ret != EE_OK){ErrorTrap();}else{if(size != readOutSize){ErrorTrap();}for(i = 0; i < readOutSize; i++){if(buffer[i] != i + id){ErrorTrap();}}}}5.验证写入的数据
验证写入的数据,确保读取的数据与写入的数据一致。
ret = EE_DeleteRecord(&eeConf,EE_TEST_RECORD_ID,CallBack);if(ret != EE_OK){ErrorTrap();}for(i = 0; i < BUFFER_SIZE; i++){buffer[i] = 0;}size = BUFFER_SIZE;ret = EE_ReadRecord(&eeConf,EE_TEST_RECORD_ID,size,buffer,&readOutSize,6.验证删除操作
if(ret != EE_ERROR_DATA_NOT_FOUND){ErrorTrap();}while(true){CallBack();}7.回调函数与错误处理函数
void CallBack(void);
static void ErrorTrap(void);void CallBack(void)
{WDOG_Refresh();
}static void ErrorTrap(void)
{while(true){CallBack();}
}
相关文章:
FLASH仿真EEPROM---基于智芯Z20K11XM
一、介绍 电可擦和可编程只读存储器(EEPROM)可以对字节或字编程和擦除。EEPROM中的数据即使断电也能保持,但Z20K1xx芯片不含EEPROM。然而,闪存可以通过EEPROM仿真软件来模拟EEPROM。Z20K1xx包含两个flash阵列。编程和擦除操作可以在一个数组上进行&#…...
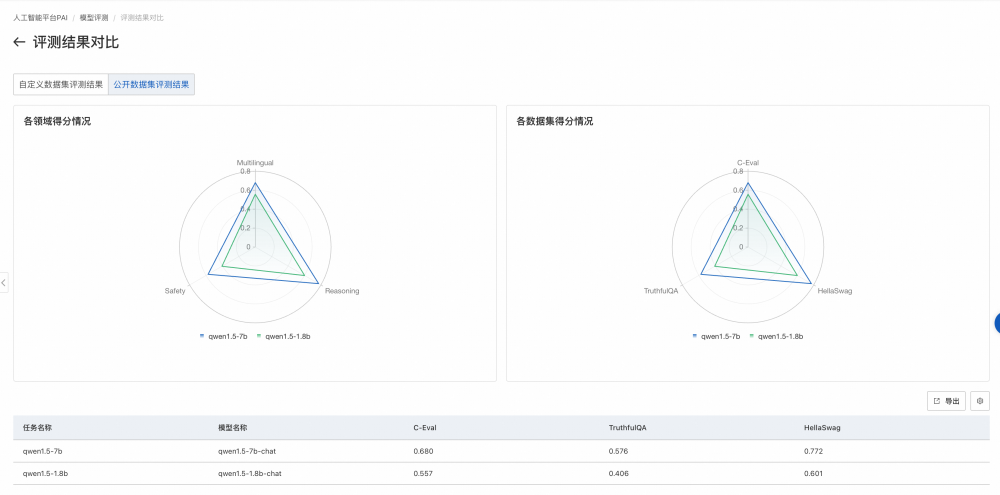
阿里云PAI大模型评测最佳实践
作者:施晨、之用、南茵、求伯、一耘、临在 背景信息 内容简介 在大模型时代,随着模型效果的显著提升,模型评测的重要性日益凸显。科学、高效的模型评测,不仅能帮助开发者有效地衡量和对比不同模型的性能,更能指导他…...
应用图扑 HT for Web 搭建拓扑关系图
拓扑结构在计算机网络设计和通信领域中非常重要,因为它描述了网络中的设备(即“点”)如何相互连接(即通过“线”)。这种结构不仅涉及物理布局,即物理拓扑,还可以涉及逻辑或虚拟的连接方式&#…...

Django Aggregation 使用指南
Django Aggregation 使用指南 在构建Django应用时,我们经常需要对数据库中的数据进行汇总或聚合操作。例如,计算某个字段的平均值、最大值或最小值。这篇文章将详细介绍如何在Django中使用聚合查询,并结合实例进行说明。 聚合查询简介 Dja…...

嵌入式学习——Linux操作系统——文件编程练习
1.使用fread和fwrite方式完成任意普通文件的拷贝功能。 模拟 文件下载 #include <stdio.h>void do_copy(FILE *fp_s,FILE *fp_d) {char buf[100] {0};int ret;while (ret fread(buf,sizeof(char),sizeof(buf),fp_s))fwrite(buf,sizeof(char),ret,fp_d); }//./a.out sr…...
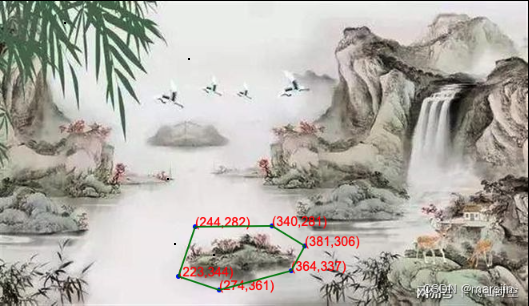
用JavaScript实现了一个简单的图像坐标点标注工具
这段代码实现了一个简单的图像标注工具,允许用户在加载的图像上进行点选标注,并且通过右键确认一个点序列来形成一个多边形。 标注效果如下 实现代码如下 <!DOCTYPE html> <html lang"en"> <head><meta charset"U…...
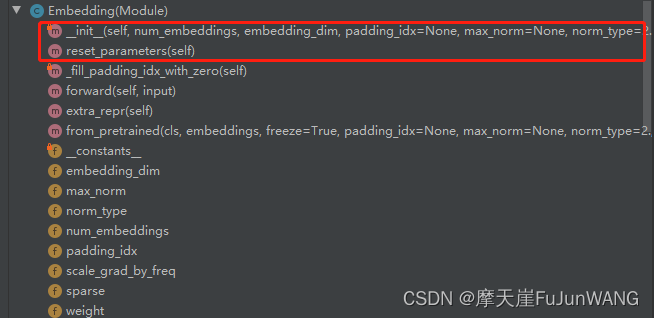
Pytorch深度解析:Transformer嵌入层源码逐行解读
前言 本部分博客需要先阅读博客: 《Transformer实现以及Pytorch源码解读(一)-数据输入篇》 作为知识储备。 Embedding使用方式 如下面的代码中所示,embedding一般是先实例化nn.Embedding(vocab_size, embedding_dim)。实例化的…...
HSP_10章 Python面向对象编程oop_基础部分
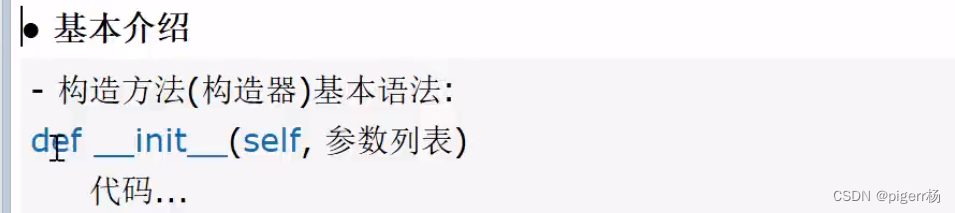
文章目录 P107 类与实例的关系1.类与实例的关系示意图2.类与实例的代码分析 P109 对象形式和传参机制1. 类与对象的区别和联系2. 属性/成员变量3. 类的定义和使用4. 对象的传递机制 P110 对象的布尔值P111 成员方法1. 基本介绍2. 成员方法的定义和基本使用3.注意事项和使用细节…...

JavaWeb系列十七: jQuery选择器 上
jQuery选择器 jQuery基本选择器jquery层次选择器基础过滤选择器内容过滤选择器可见度过滤选择器 选择器是jQuery的核心, 在jQuery中, 对事件处理, 遍历 DOM和Ajax 操作都依赖于选择器jQuery选择器的优点 $(“#id”) 等价于 document.getElementById(“id”);$(“tagName”) 等价…...

Gone框架介绍30 - 使用`goner/gin`提供Web服务
gone是可以高效开发Web服务的Golang依赖注入框架 github地址:https://github.com/gone-io/gone 文档地址:https://goner.fun/zh/ 使用goner/gin提供Web服务 文章目录 使用goner/gin提供Web服务注册相关的Goners编写Controller挂载路由路由处理函数io.Rea…...
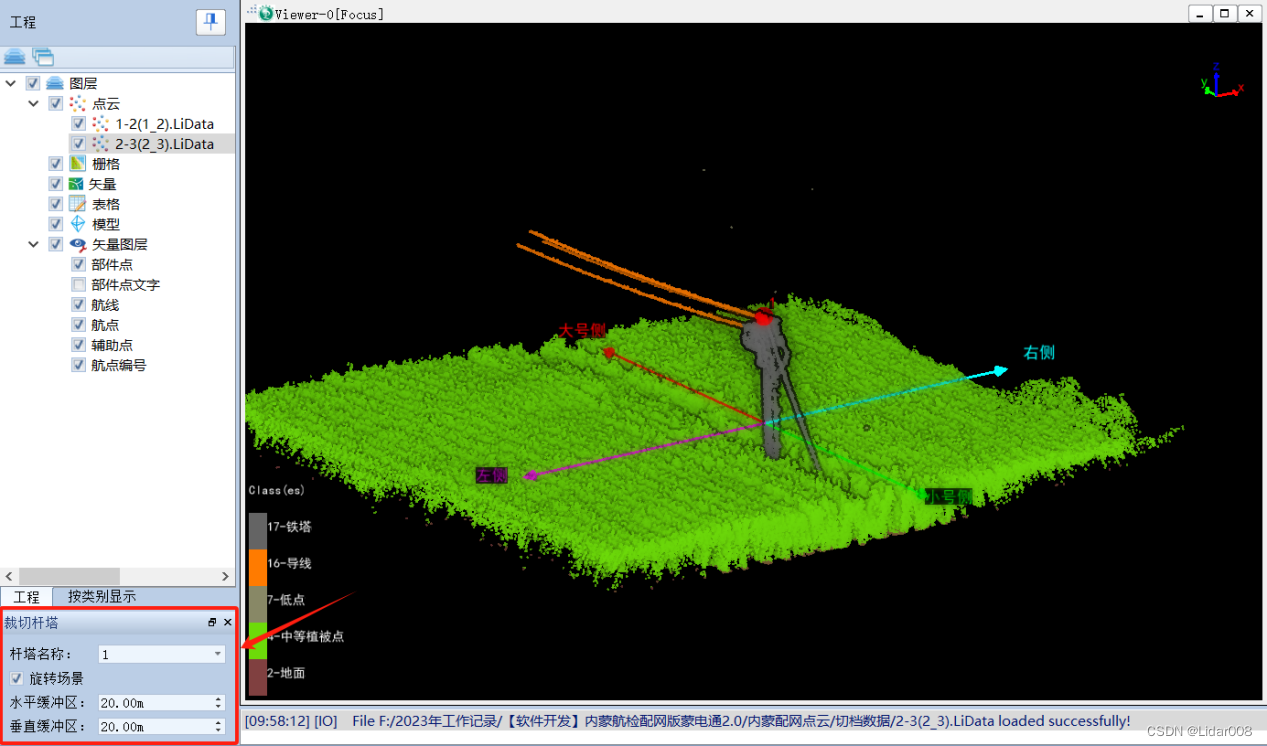
Lipowerline5.0 雷达电力应用软件下载使用
1.配网数据处理分析 针对配网线路点云数据,优化了分类算法,支持杆塔、导线、交跨线、建筑物、地面点和其他线路的自动分类;一键生成危险点报告和交跨报告;还能生成点云数据采集航线和自主巡检航线。 获取软件安装包联系邮箱:289…...

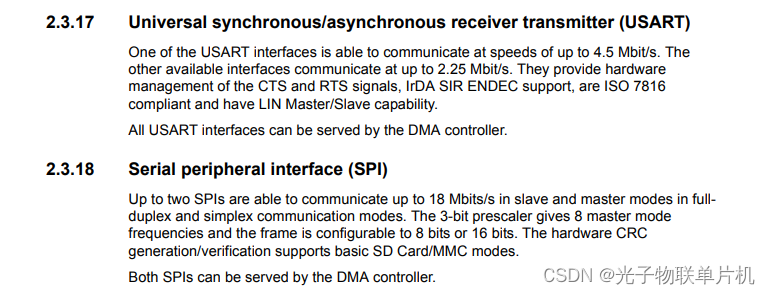
STM32学习之一:什么是STM32
目录 1.什么是STM32 2.STM32命名规则 3.STM32外设资源 4. STM32的系统架构 5. 从0到1搭建一个STM32工程 学习stm32已经很久了,因为种种原因,也有很久一段时间没接触过stm32了。等我捡起来的时候,发现很多都已经忘记了,重新捡…...
AI绘画Stable Diffusion 超强一键去除图片中的物体,免费使用!
大家好,我是设计师阿威 在生成图像时总有一些不完美的小瑕疵,比如多余的物体或碍眼的水印,它们破坏了图片的美感。但别担心,今天我们将介绍一款神奇的工具——sd-webui-cleaner,它可以帮助我们使用Stable Diffusion轻…...
零基础STM32单片机编程入门(一)初识STM32单片机
文章目录 一.概要二.单片机型号命名规则三.STM32F103系统架构四.STM32F103C8T6单片机启动流程五.STM32F103C8T6单片机主要外设资源六.编程过程中芯片数据手册的作用1.单片机外设资源情况2.STM32单片机内部框图3.STM32单片机管脚图4.STM32单片机每个管脚可配功能5.单片机功耗数据…...

Github上前十大开源Rust项目
在github上排名前十的Rust开源项目整理出来与大家共享,以当前的Star数为准。 Deno Deno 是 V8 上的安全 TypeScript 运行时。Deno 是一个建立在V8、Rust和Tokio之上的 JavaScript、TypeScript 和 WebAssembly 的运行时环境,具有自带安全的设置和出色的开…...

硬件开发笔记(二十):AD21导入外部下载的元器件原理图库、封装库和3D模型
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/139707771 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV…...
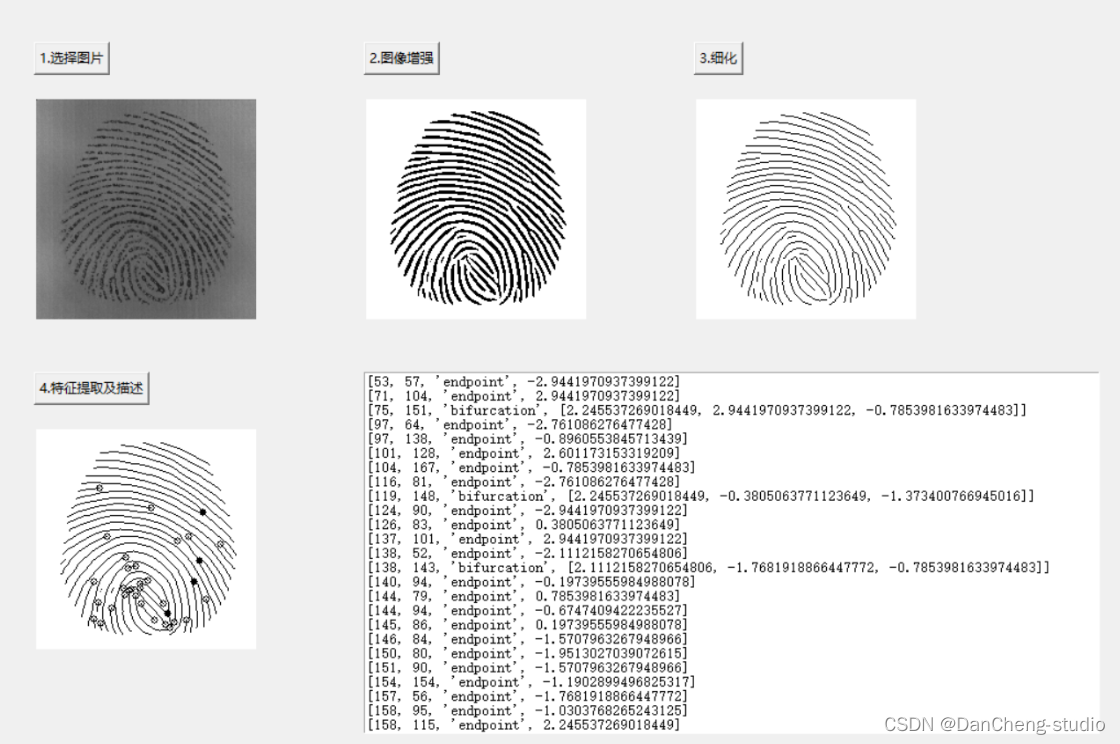
竞赛选题 python opencv 深度学习 指纹识别算法实现
1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 python opencv 深度学习 指纹识别算法实现 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:4分创新点:4分 该项目较为新颖…...
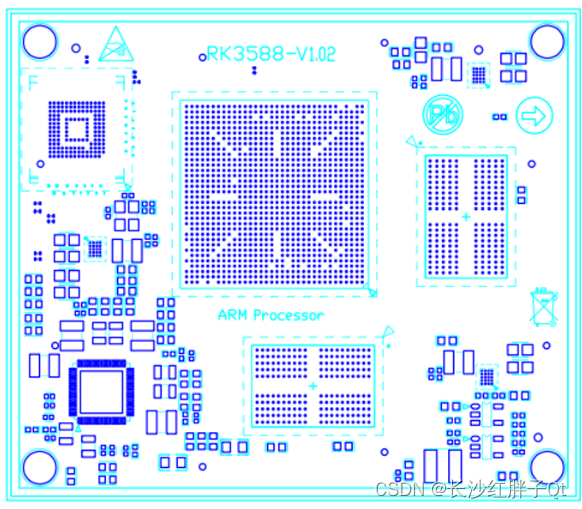
RK3568开发笔记(三):瑞芯微RK3588芯片介绍,入手开发板的核心板介绍
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/139905873 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV…...
-- 如何将Igh移植到Linux/Windows/RTOS等多操作系统)
EtherCAT主站IgH解析(二)-- 如何将Igh移植到Linux/Windows/RTOS等多操作系统
版权声明:本文为本文为博主原创文章,转载请注明出处 https://www.cnblogs.com/wsg1100 如有错误,欢迎指正。 本文简单介绍如何将 igh 移植到 zephyr、freertos、rtems、rtthread等RTOS ,甚至 windows 上。 ##前言 目前࿰…...

ansible copy模块参选选项
copy模块用于将文件从ansible控制节点(管理主机)或者远程主机复制到远程主机上。其操作类似于scp(secure copy protocol)。 关键参数标红。 参数: src:(source:源) 要复制到远程…...

华硕笔记本终极优化神器:GHelper完整使用教程
华硕笔记本终极优化神器:GHelper完整使用教程 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Expertbook…...

10分钟精通:Bilibili视频下载器完整使用指南与高级技巧
10分钟精通:Bilibili视频下载器完整使用指南与高级技巧 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 还在为无法保存B站…...
)
别再死记硬背了!用Python脚本帮你自动生成CANopen PDO映射表(附源码)
用Python自动化生成CANopen PDO映射表的工程实践 每次面对密密麻麻的CANopen设备描述文件时,你是否也经历过这样的场景:深夜加班核对PDO映射参数,反复翻阅数百页的EDS文档,稍不留神就会把0x1800错配成0x1801。这种低效的手工操作不…...

G-Helper终极指南:全面掌握华硕笔记本性能优化与硬件控制
G-Helper终极指南:全面掌握华硕笔记本性能优化与硬件控制 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook,…...
)
别再手动绕田了!用Python+Google Earth Pro搞定农田边界KML文件(附完整代码)
零成本农田边界数字化:Python与Google Earth Pro实战指南 在农业自动化领域,获取精确的农田边界数据是路径规划的第一步。传统方法依赖RTK设备或无人机测绘,成本高昂且操作复杂。本文将介绍一种无需专业硬件的解决方案,仅需一台普…...

手把手调SerDes眼图:从FFE系数配置到示波器实测避坑指南
手把手调SerDes眼图:从FFE系数配置到示波器实测避坑指南 在高速数字电路设计中,SerDes(串行器/解串器)技术已经成为现代通信系统的核心。无论是数据中心的光模块,还是消费电子中的USB4接口,SerDes都扮演着关…...
)
ArcGIS实战:手把手教你拼接与裁剪全国10米建筑高度栅格数据(以武汉为例)
ArcGIS实战:全国10米建筑高度栅格数据的精准处理与武汉应用 引言:高精度建筑数据的价值与挑战 城市规划师李明最近在武汉某旧城改造项目中遇到了棘手问题——传统30米分辨率的建筑高度数据无法准确反映老城区复杂的建筑形态差异。当他尝试获取更高精度的…...

可穿戴设备电池选型与电源管理实战指南
1. 项目概述:为什么可穿戴设备的电池选型是个技术活 做可穿戴电子项目,无论是智能手环、发光服饰还是互动饰品,最让人头疼的往往不是代码和电路,而是最后那一步: 怎么给它供电 。你可能花了好几天调通了传感器和灯带…...

程序员,真要失业了:Claude Code新增/goal指令,一个命令,AI替你干完整个项目
最近,GitHub上发生了一件小事。 一个全美排名Top 5的软件工程师,发了一条帖子,只有三句话: “我用/goal重构了一个3万行的遗留项目,花了4小时。” “没有人盯着我,没有PR被拒,没有半夜爬起来看…...

告别混乱!用EPLAN高效管理端子连接图的5个实战技巧与常见坑点复盘
告别混乱!用EPLAN高效管理端子连接图的5个实战技巧与常见坑点复盘 在电气工程设计领域,端子连接图的质量直接影响着生产效率和调试准确性。许多工程师在项目后期常常陷入反复修改端子图表的泥潭,不仅耗费宝贵时间,还可能因疏忽导致…...