第 133 场 LeetCode 双周赛题解
A 使所有元素都可以被 3 整除的最少操作数
遍历 n u m s nums nums ,每有一个不被 3 3 3 整除的数,则操作数加 1 1 1
class Solution {public:int minimumOperations(vector<int>& nums) {int res = 0;for (auto x : nums)if (x % 3 != 0)res++;return res;}
};
B 使二进制数组全部等于 1 的最少操作次数 I
遍历:顺序遍历 n u m s nums nums 中的长为 3 3 3 的子数组,若子数组首元素为 0 0 0 ,则反转子数组,最终判断 n u m s nums nums 的最后两个元素是否为 1 1 1
class Solution {public:int minOperations(vector<int>& nums) {int n = nums.size();int res = 0;for (int i = 0; i < n - 2; i++)if (nums[i] == 0) {res++;nums[i + 1] ^= 1;nums[i + 2] ^= 1;}if (nums[n - 2] == 0 || nums[n - 1] == 0)return -1;return res;}
};
C 使二进制数组全部等于 1 的最少操作次数 II
遍历:顺序遍历 n u m s nums nums ,记录当前操作的总次数,对于每个遍历到的位置,若当前操作次数为偶数则当前位置的元素不变,否则当前位置元素反转
class Solution {public:int minOperations(vector<int>& nums) {int res = 0;for (auto x : nums)if ((x + res) % 2 == 0)res++;return res;}
};
D 统计逆序对的数目
动态规划:设 p [ i , j ] p[i,j] p[i,j] 为 i + 1 i+1 i+1 个不同的数形成的恰有 j j j 个逆序对的排列的数目(模 1 e 9 + 7 1e9+7 1e9+7),通过枚举排列的最后一个元素来进行状态转移,转移过程注意不满足题目条件的排列,可以通过记忆化搜索实现
class Solution {public:using ll = long long;ll mod = 1e9 + 7;int numberOfPermutations(int n, vector<vector<int>>& requirements) {vector<int> cnt(n, -1);for (auto& it : requirements)cnt[it[0]] = it[1];//固定要求vector<vector<ll>> p(n, vector<ll>(cnt[n - 1] + 1, INT64_MIN));function<ll(int, int)> get = [&](int loc, int k) {//记忆化搜索if (k < 0)return 0LL;if (p[loc][k] != INT64_MIN)return p[loc][k];if (cnt[loc] != -1 && cnt[loc] != k)//不满足要求return p[loc][k] = 0;if (loc == 0)return p[loc][k] = k == 0 ? 1 : 0;p[loc][k] = 0;for (int i = 0; i <= loc; i++) {//枚举最后一位p[loc][k] += get(loc - 1, k - (loc - i));p[loc][k] %= mod;}return p[loc][k];};return (get(n - 1, cnt[n - 1]) + mod) % mod;}
};
相关文章:
第 133 场 LeetCode 双周赛题解
A 使所有元素都可以被 3 整除的最少操作数 遍历 n u m s nums nums ,每有一个不被 3 3 3 整除的数,则操作数加 1 1 1 class Solution {public:int minimumOperations(vector<int>& nums) {int res 0;for (auto x : nums)if (x % 3 ! 0)res…...

【仿真】UR机器人相机标定、立体标定、手眼标定、视觉追踪(双目)
实现在CoppeliaSim环境中进行手眼标定和目标追踪的一个例子。它主要涉及到机器人、机器视觉和控制算法的编程,使用了Python语言。接下来对该代码的主要类和方法进行解析: 1. 导入相关库 用于与CoppeliaSim模拟器通过ZeroMQ接口通信。包含Rotation类&…...
功能测试【测试用例模板、Bug模板、手机App测试★】
功能测试 Day01 web项目环境与测试流程、业务流程测试一、【了解】web项目环境说明1.1 环境的定义:项目运行所需要的所有的软件和硬件组合1.2 环境(服务器)的组成:操作系统数据库web应用程序项目代码1.3 面试题:你们公司有几套环境࿱…...

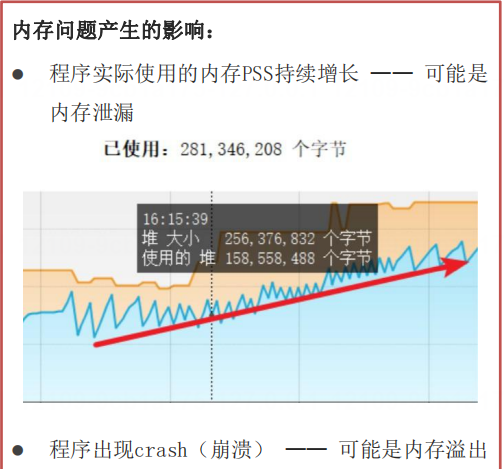
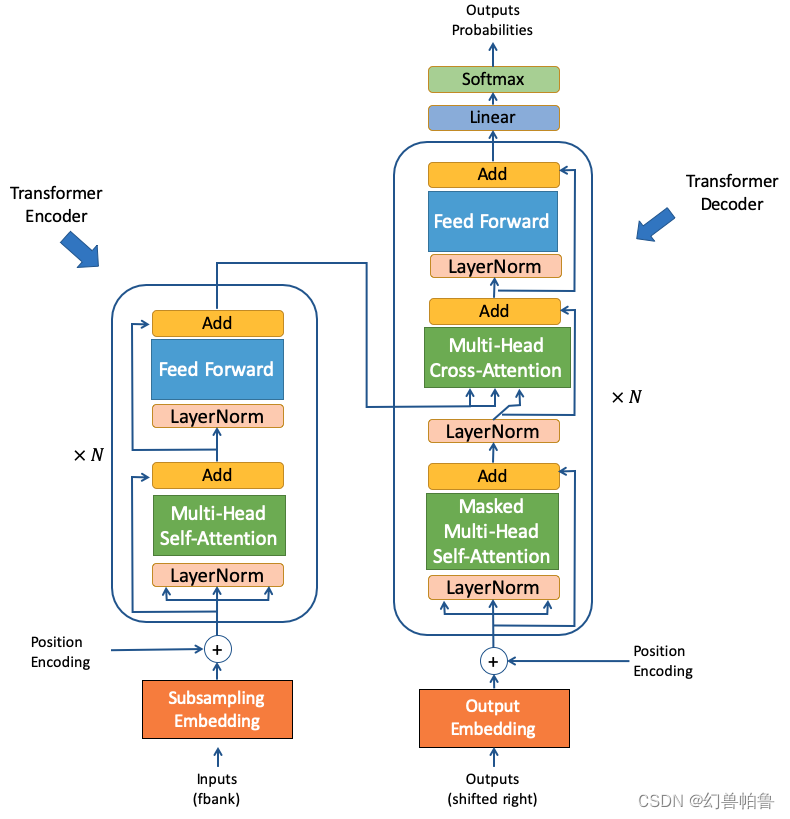
Android音频系统
最近在做UAC的项目,大概就是接收内核UAC的事件,也就是声音相关事件。然后就是pcm_read和AudioTrackr->write之间互传。感觉略微有点奇怪,所以简单总结一下。 1 UAC的简要流程 open_netlink_socket 打开内核窗口,类似于ioctl。…...
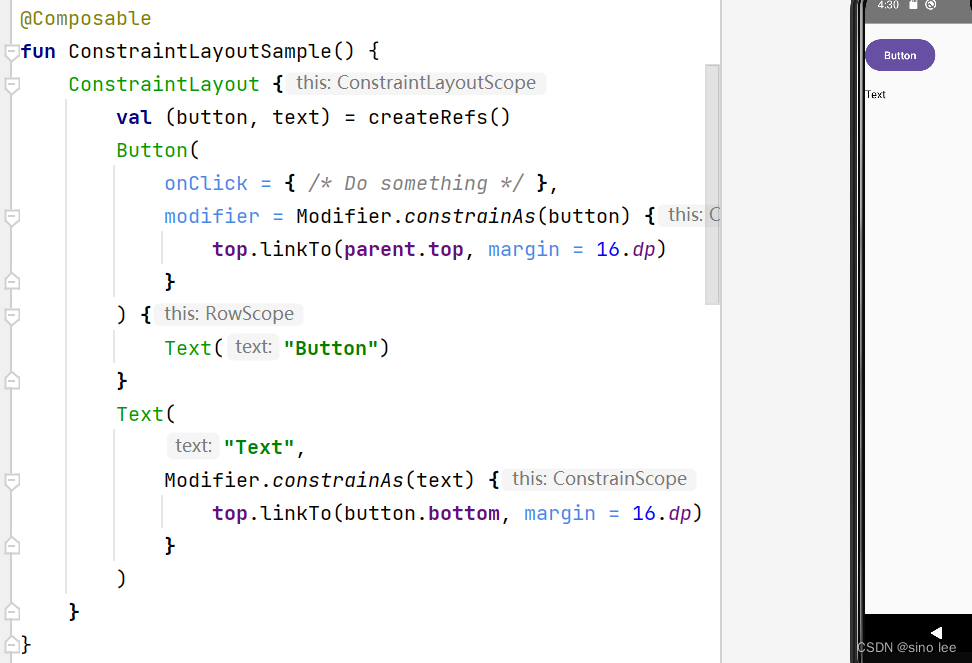
Android开发系列(九)Jetpack Compose之ConstraintLayout
ConstraintLayout是一个用于构建复杂布局的组件。它通过将子视图限制在给定的约束条件下来定位和排列视图。 使用ConstraintLayout,您可以通过定义视图之间的约束关系来指定它们的位置。这些约束可以是水平和垂直的对齐、边距、宽度和高度等。这允许您创建灵活而响…...

SpringMVC系列三: Postman(接口测试工具)
接口测试工具 💞Postman(接口测试工具)Postman介绍Postman是什么Postman相关资源Postman安装Postman快速入门Postman完成Controller层测试其它说明 💞课后作业 上一讲, 我们学习的是SpringMVC系列二: 请求方式介绍 现在打开springmvc项目 💞…...

项目实训-vue(十二)
项目实训-vue(十二) 文章目录 项目实训-vue(十二)1.概述2.处理进度可视化 1.概述 本篇博客将记录我在图片上传页面中的工作。 2.处理进度可视化 除了导航栏之外,我们还需要对上传图片以及图片处理的过程以及流程进行…...

达梦数据库的系统视图v$lock
达梦数据库的系统视图v$lock 在达梦数据库(DM)中,V$LOCK 系统视图用于查看当前数据库中的锁定状态。该视图提供了关于所有锁定详细信息,例如锁的内存地址、所属事务 ID,锁类型和锁模式等。这对于数据库管理员进行锁定…...

【无人机三维路径规划】基于树木生长算法TGA实现复杂城市地形下无人机避障三维航迹规划附Matlab代码
% 定义无人机起始位置和目标位置 start_point [0, 0, 0]; % 起始位置 [x, y, z] target_point [100, 100, 100]; % 目标位置 [x, y, z] % 定义城市地形和障碍物信息 city_map imread(‘city_map.png’); % 城市地形图像 obstacles [ 20, 30, 10; % 障碍物1位置 [x, y, z] …...

制造业工厂的管理到底有多难
一、引言 随着全球经济的不断发展,制造业作为实体经济的核心,对国家的经济增长起着至关重要的作用。然而,制造业工厂的管理却是一项复杂而艰巨的任务。本文将深入探讨制造业工厂管理所面临的挑战,并提出相应的应对策略。 二、制造…...
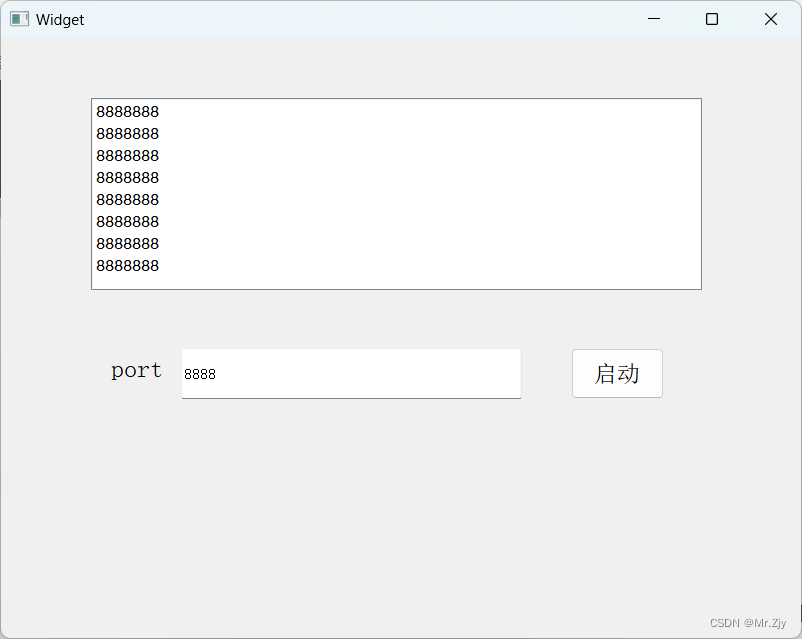
QTday5 2024-06-19
作业要求: 1.思维导图 2.整理代码:TCP服务器 作业1:思维导图 作业2:整理代码 运行代码: widget.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QTcpServer> #include <QList>…...

Node官网下载各个版本
node官网下载各个版本地址 例如 14.16.0 Index of /download/release/v14.16.0/...

备战秋招day4
算法 242. 有效的字母异位词 class Solution {public boolean isAnagram(String s, String t) {int[] count new int[26];for(int i 0;i<s.length();i){count[s.charAt(i)-a];}for(int i 0;i<t.length();i){count[t.charAt(i)-a]--;if(count[t.charAt(i)-a]<0){r…...
)
【华为OD机试B卷】服务器广播、需要广播的服务器数量(C++/Java/Python)
题目 题目描述 服务器连接方式包括直接相连,间接连接。 A和B直接连接,B和C直接连接,则A和C间接连接。 直接连接和间接连接都可以发送广播。 给出一个N*N数组,代表N个服务器, matrix[i][j] 1, 则代表i和j直…...
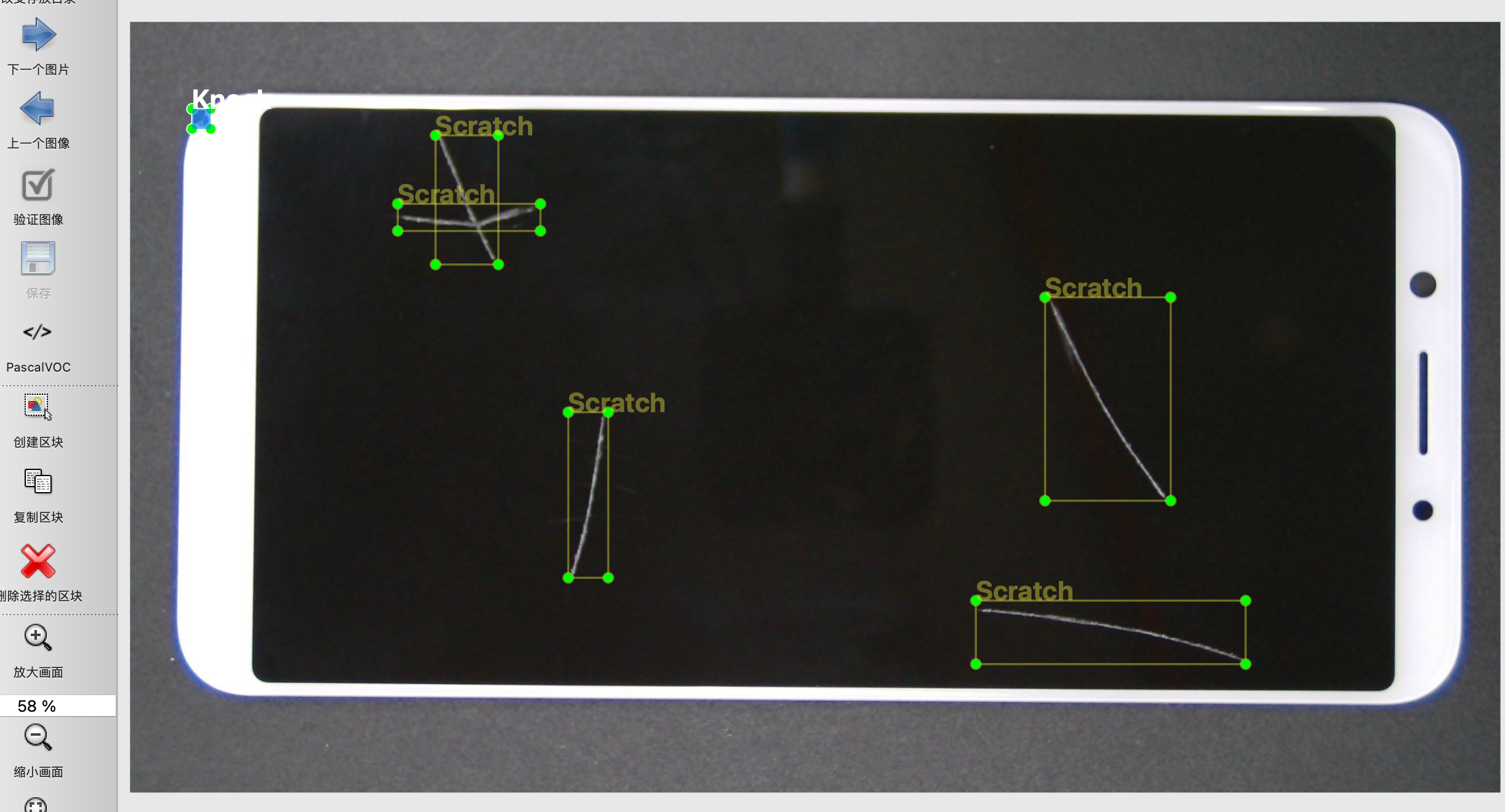
目标检测数据集 - 手机屏幕表面表面缺陷检测数据集下载「包含VOC、COCO、YOLO三种格式」
数据集介绍:手机屏幕表面缺陷检测数据集,真实采集高质量手机屏幕表面含缺陷图片数据,数据集含多款不同型号和品牌的手机屏幕表面图片数据,包括苹果手机屏、三星手机屏、华为手机屏等数据。数据标注标签包括 Bubble 气泡/水滴、Scr…...
语音相关算法学习整理
最近看了一下百度paddlespeech的一些公开课,把课程里的视频内容大体听了一下,现在整理一下笔记。教程链接见:飞桨AI Studio星河社区-人工智能学习与实训社区 语音识别的过程可以这样简单概括: 将声音信号经过预加重、加窗、fft等…...
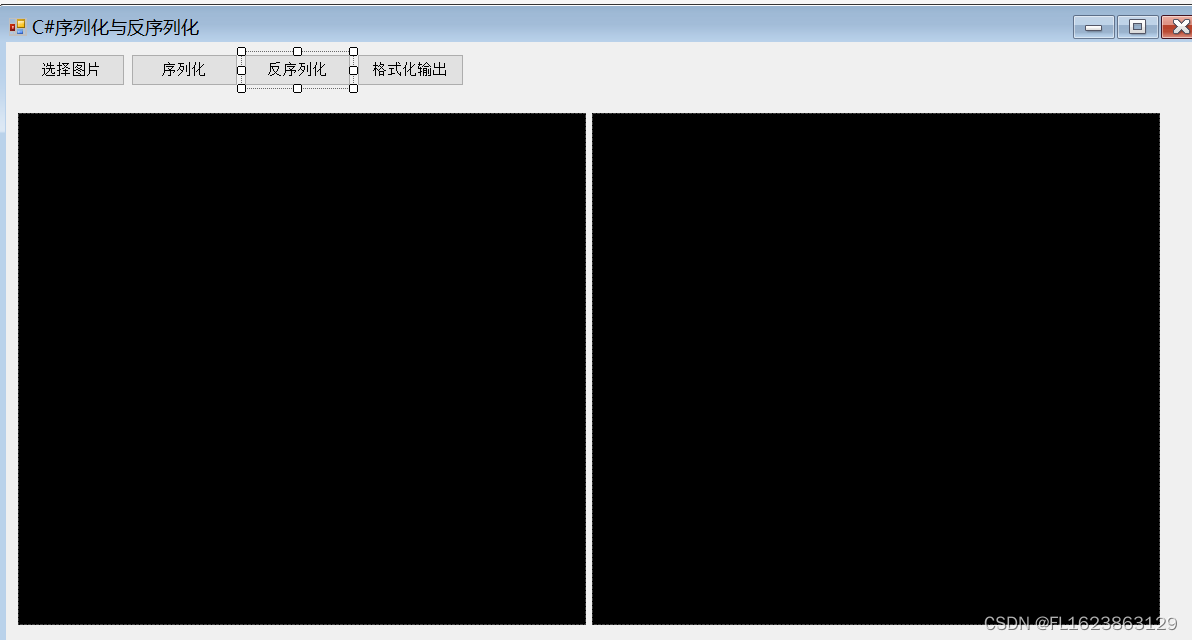
[C#] opencvsharp对Mat数据进行序列化或者反序列化以及格式化输出
【简要介绍】 在OpenCVSharp中,FileStorage类用于将数据(包括OpenCV的Mat类型数据)序列化为XML或YAML格式的文件,以及从这些文件中反序列化数据。以下是关于FileStorage类用法的详细说明: 写入数据(序列化…...

Linux中的TCP与UDP:理解两者的差异
在计算机网络的世界中,TCP(传输控制协议)和UDP(用户数据报协议)是两种至关重要的传输层协议。它们就像是我们日常生活中的通信方式,有着不同的使用场景和优缺点。通过一个简单的比喻,我们可以更…...
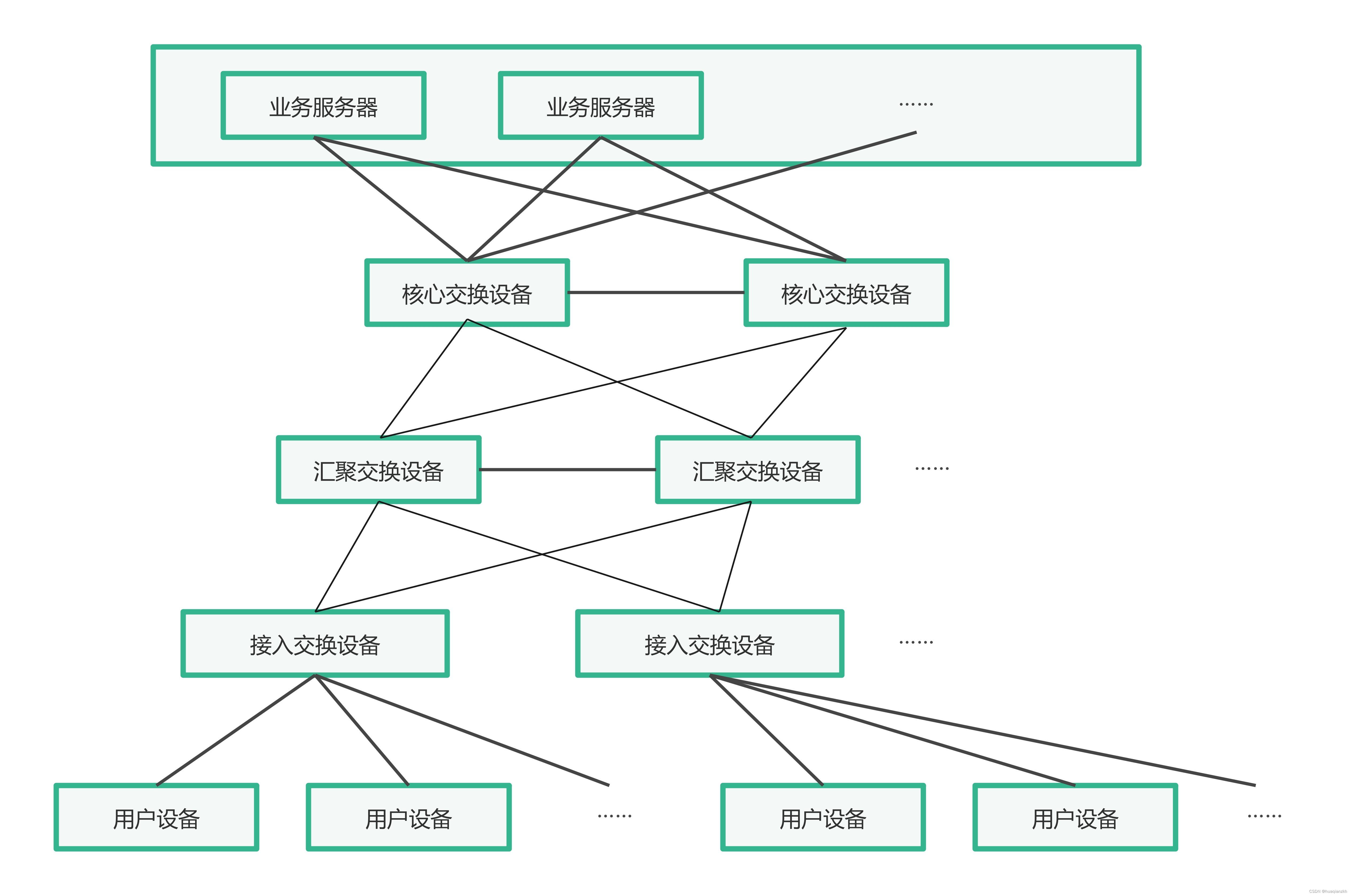
通信系统网络架构_1.局域网网络架构
当今,通信网络从大的方面主要包括局域网、广域网、移动通信网等网络形式。不同的网络会采用不同的技术进行网络构建。以下针对不同的网络给出各自的网络架构以及所采用的技术。 1.概述 局域网,即计算机局部区域网络,是一种为单一机构所拥有的…...
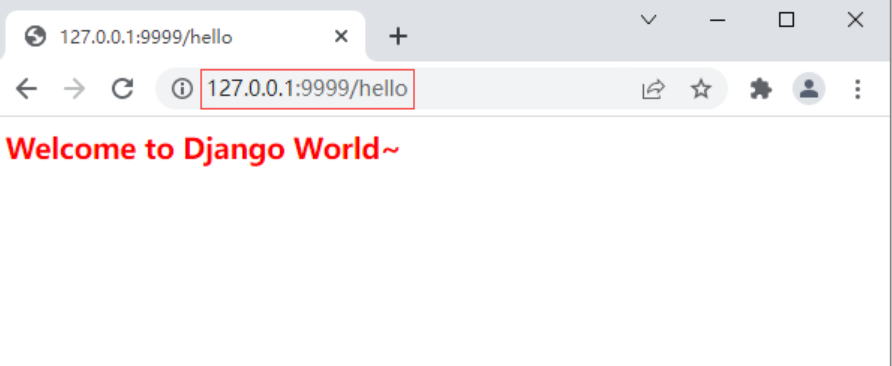
Pycharm 启动 Django项目 —— python篇
1、打开你的工程,在菜单栏里找到Run-->Edit Configurations 2、在打开的对话框里边选择Python,点击号 3.选择Python 4.出现了一个新的项Unnamed,你可以把它改名叫debug,好听一点 5.脚本选择你网站的manage.py,脚本参…...

打破平台壁垒:Windows上安装APK文件的完整解决方案
打破平台壁垒:Windows上安装APK文件的完整解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾想过在Windows电脑上直接运行安卓应用ÿ…...

对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性 在个人开发项目中接入大模型时,开发者通常面临一个选择&am…...

Python与ChatGPT构建智能办公自动化:从任务分解到智能体系统
1. 项目概述:用Python与ChatGPT联手,让办公自动化“开口说话”如果你每天还在重复着打开Excel、复制粘贴数据、手动写邮件、整理报告这些枯燥的活儿,那这个项目可能就是你的“数字员工”入职通知书。Sven-Bo/automate-office-tasks-using-cha…...

LVGL在无显存TFT屏上的驱动适配:双缓冲与DMA优化实践
1. 项目概述:当TFT屏幕遇上LVGL最近在做一个嵌入式GUI项目,核心任务是把LVGL这个轻量级图形库,适配到一块分辨率不算高但接口比较“个性”的TFT屏幕上。这活儿听起来像是把标准插头插到非标插座上,得自己动手改改线序。LVGL这几年…...

Blitz.js全栈开发框架:零API理念与Next.js深度集成实战
1. 项目概述:一个颠覆性的全栈开发框架如果你和我一样,在过去的几年里,一直在React生态圈里打转,从Create React App到Next.js,再到尝试自己搭建一套包含身份验证、数据层、API路由的完整应用,那你一定对那…...

GitClaw:基于Go的轻量级Git钩子服务器与集中式权限管理方案
1. 项目概述与核心价值如果你是一名开发者,尤其是经常在团队协作中处理Git仓库的工程师,那么你一定对“权限管理”这四个字又爱又恨。爱的是它能保障代码安全,恨的是它配置起来繁琐,尤其是在处理跨项目、跨团队的复杂权限矩阵时。…...

Ruby LLM框架:为Ruby开发者打造的大语言模型应用开发工具包
1. 项目概述:一个为Ruby语言量身打造的LLM应用框架如果你是一名Ruby开发者,最近被各种大语言模型(LLM)的应用搞得心痒痒,但看着满世界的Python库和框架感到无从下手,那么crmne/ruby_llm这个项目可能就是你在…...

基于Nginx-Lua镜像构建高性能可编程网关的实践指南
1. 项目概述:一个为现代Web架构而生的Nginx镜像如果你和我一样,长期在容器化环境中部署和管理Web服务,那么你一定对Nginx的灵活性和Lua脚本的强大能力印象深刻。但将这两者结合,并打包成一个稳定、安全、功能齐全的Docker镜像&…...

Qwen2.5-14B实战指南:3个关键步骤突破本地大模型部署瓶颈
Qwen2.5-14B实战指南:3个关键步骤突破本地大模型部署瓶颈 【免费下载链接】Qwen2.5-14B 项目地址: https://ai.gitcode.com/hf_mirrors/ai-gitcode/Qwen2.5-14B 当开发者面对复杂的代码生成任务或技术文档分析需求时,往往会受限于云端API的延迟和…...

ARM处理器仿真技术:Cortex-R52与Neoverse实战解析
1. ARM处理器仿真技术概述在现代芯片设计和软件开发流程中,处理器仿真模型已成为不可或缺的关键工具。作为Arm生态系统的重要组成部分,Iris仿真组件提供了对Cortex-R52和Neoverse系列处理器的精确模拟能力。这些模型不仅能够模拟指令执行流程,…...