机器人控制系列教程之URDF文件语法介绍
前两期推文:机器人控制系列教程之动力学建模(1)、机器人控制系列教程之动力学建模(2),我们主要从数学的角度介绍了机器人的动力学建模的方式,随着机器人技术的不断发展,机器人建模成为了机器人系统设计中的一项关键任务。URDF(Unified Robot Description Format)是一种用于描述机器人结构和属性的XML文件格式。它提供了一种标准化的方式,使得不同的机器人系统能够共享和交换机器人模型的信息。在ROS(Robot Operating System,后续将重点讲解)机器人操作系统中,URDF模型是机器人导航、仿真和感知等功能的基础。
< link > 标签
< link >标签用于描述机器人某个刚体部分的外观和物理属性,包括尺寸(size)、颜色(color、形状(shape)入、惯性矩阵(inertial matrix.)、入碰撞参数(collision properties)等。机器人的1ink结构一般如下图所示,其基本的URDF描述语法如下:

<link name="<link name>">
<inertial> . . . . . . </ inertial>
<visual> . . . . . . </visual>
<collision> . . . . . . </coll ision>
</link>
< visual >标签用于描述机器人link部分的外观参数,< inertial >标签用于描述link的惯性参数,而< collision >标签用于描述link的碰撞属性。从图中可以看到,检测碰撞的1ink区域大于外观可视的区域,这就意味着只要有其他物体与collision区域相交,就认为link发生碰撞。
< joint标签 >
< joint >标签用于描述机器人关节的运动学和动力学属性,包括关节运动的位置和速度限
制。根据机器人的关节运动形式,可以将其分为六种类型(如下表所示)。
<joint name="my_joint" type="floating"><origin xyz="0 0 1" rpy="0 0 3.1416"/><parent link="link1"/><child link="link2"/><calibration rising="0.0"/><dynamics damping="0.0" friction="0.0"/><limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" /><safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0" soft_upper_limit="0.5" /></joint>
其中必须指定joint的parent link和child link,还可以设置关节的其他属性。
- < calibration >:关节的参考位置,用来校准关节的绝对位置;
- < dynamics >:描述关节的物理属性,例如阻尼值、物理静摩擦力等,经常在动力学仿真中用到;
- < limit >:描述运动的一些极限值,包括关节运动的上下限位置、速度限制、力矩限制等;
- < mimic >:描述该关节与已有关节的关系;
- <safety_controller>:描述安全控制器参数。保护机器人关节的运动;
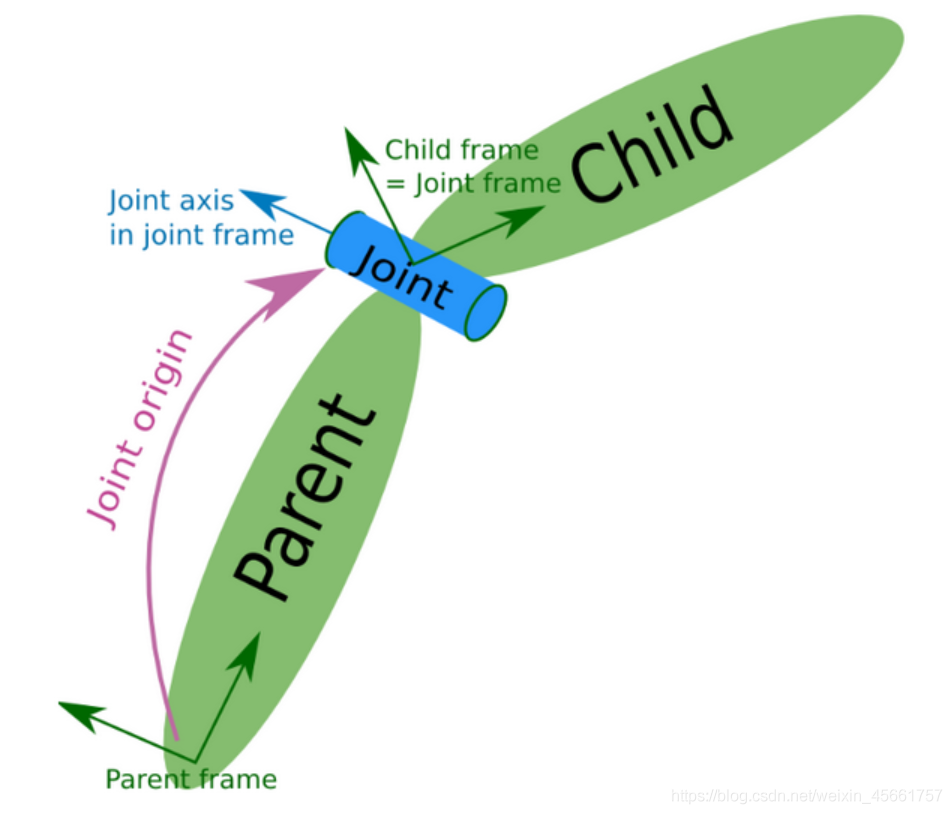
与人的关节样,机器人关节的主要作用是连接两个刚体1ink,这两个link分别称为parent link和child link.

< robot >标签
< robot >是完整机器人模型的最顶层标签,< link >和< joint >标签都必须包含在< robot >标签内。一个完整的机器人模型由一系列< link >和< joint >组成。
< robot >标签内可以设置机器人的名称,其基本语法如下:
<robot><link>...</link><link>...</link><joint>...</joint>
</robot>
URDF文件里面有着与XML语言格式。要定义好一个机器人,首先你得知道机器人有什么。一个机器人主要由连杆(link)和关节(joint)组成,URDF具有类似XML树状结构的。link与 joint是robot下面的子分量,换句话说joint和link隶属于robot。知道了机器人的基本构成之后还不够,还需要知道基本组成部分的一些物理信息,例如连杆的质量属性,惯量属性,颜色,以及关节的种类,这到底是转动关节还是平动关节。因此link和joint也要有自己的子分量,比如inertial和visual, visual 下面还可以再次细分子分量geometry和material,然后material下面还可以有自己的子分量,由此往复我们就可以用URDF来充分定义好一个机器人的各个信息。所以一个增加了这些额外信息的URDF文件内容例子如下:
<robot><link><inertial>...</inertial><visual><geometry>...</geometry><material><color /></material></visual></link>...
</robot>
我们定义好了机器人的组成部分以及各个部分所具有的信息,接着还需要有属性描述这些量。比如robot,link,joint都有name属性,一个用来辨识模块的字符串。color有rgba属性,用来定义连杆的外表颜色。添加了相关信息的URDF文件长这个样子:
<robot name = "linkage"><link name = "root link"><inertial>...</inertial><visual><geometry>...</geometry><material><color rgba = "1 0 0 1" /></material></visual></link>...
</robot>
自定义模型及导入MATLAB
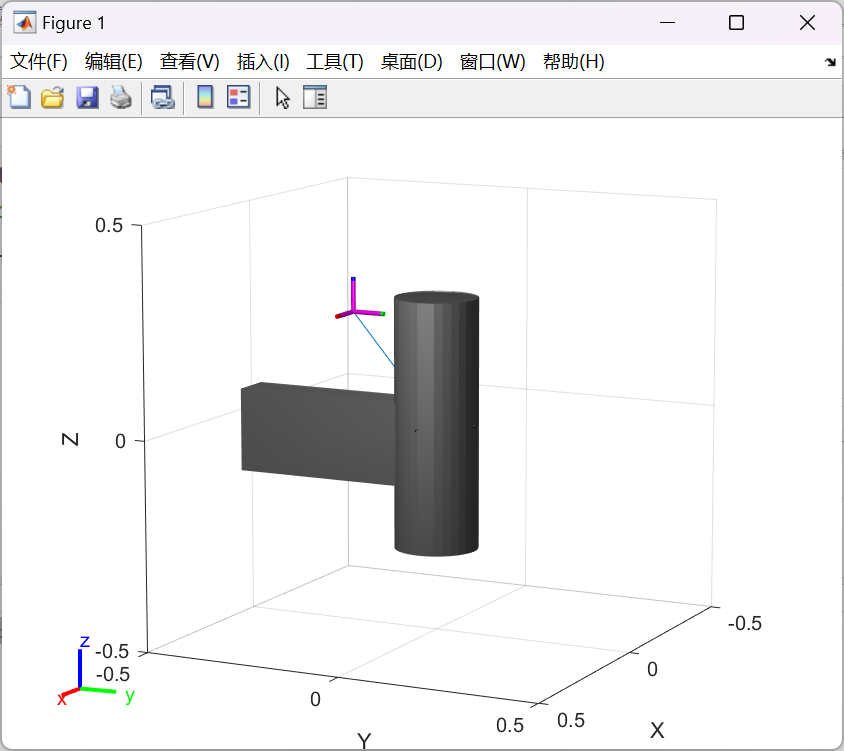
下面我们将通过URDF格式创建两个连杆,并创建运动副将这两个连杆固定起来。具体代码如下:
<?xml version="1.0"?>
<robot name='TechM_Robot'><link name="link_1"><visual><geometry><cylinder length="0.6" radius="0.1"/></geometry><inertial><origin rpy="0 0 0.3" xyz="0.0002 0.0002 0.1264"/> <mass value="5.6431"/><inertia ixx="0.1183" ixy="-0.0001" ixz="0.0001" iyy="0.1182" iyz="0.0001" izz="0.0140"/> </inertial></visual></link><link name="link_2"><visual><geometry><box size="0.6 0.1 0.2"/></geometry><origin rpy="0 0 1.57075" xyz="0 0 -0.3"/></visual></link><joint name="joint_1" type="fixed"><parent link="link_1"/><child link="link_2"/><origin rpy="0 0 0" xyz="0 -0.22 0.25"/><axis xyz="0 0 0"/></joint>
</robot>
打开MATLAB软件,输入
TechM_Robot=importrobot('test.urdf');
show(TechM_Robot)
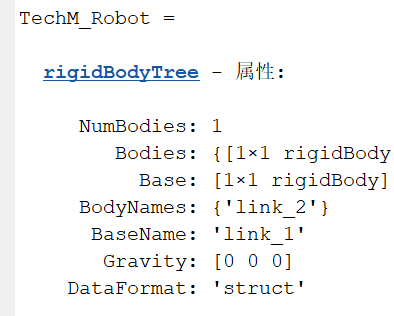
即可看到刚才创建的两个连杆的机器人以及机器人的各种属性。
对于通过URDF文件建立机器人的模型来说,相关的参数设置属实较为麻烦,明天得推文我们将讲解如何利用URDF生成工具来自动导出URDF文件。
参考资料
- https://blog.csdn.net/zhelijun/article/details/102709150
- https://www.guyuehome.com/34641
往期推荐

相关文章:
机器人控制系列教程之URDF文件语法介绍
前两期推文:机器人控制系列教程之动力学建模(1)、机器人控制系列教程之动力学建模(2),我们主要从数学的角度介绍了机器人的动力学建模的方式,随着机器人技术的不断发展,机器人建模成为了机器人系统设计中的一项关键任务。URDF&…...

Arathi Basin (AB) PVP15
Arathi Basin (AB) PVP15 阿拉希盆地,PVP,15人战场...

Ubuntu/Linux SSH 端口转发
文章目录 Ubuntu/Linux SSH 端口转发概述本地端口转发场景一场景二 参考资料 Ubuntu/Linux SSH 端口转发 概述 SSH, Secure Shell 是一种在网络上用于安全远程登录到另一台机器的工具。除了远程登录以外,ssh 的端口转发是它的另一项强大功能。通过 ssh 端口转发功…...

flask的locked_cached_property
下面是一个关于 locked_cached_property 装饰器的详细教程。这个装饰器将一个方法转换为一个惰性属性,在第一次访问时计算其值,并在随后的访问中缓存该值。同时,它在多线程环境中是线程安全的。 教程:理解和使用 locked_cached_p…...
OSI七层模型TCP/IP四层面试高频考点
OSI七层模型&TCP/IP四层&面试高频考点 1 OSI七层模型 1. 物理层:透明地传输比特流 在物理媒介上传输原始比特流,定义了连接主机的硬件设备和传输媒介的规范。它确保比特流能够在网络中准确地传输,例如通过以太网、光纤和无线电波等媒…...

Swagger2及常用校验注释说明
Api(value "后台用户管理") RestController RequestMapping("bossuser") public class BossUserController {ApiOperation(value "测试接口")PostMapping("test")public String testUser(Valid RequestBody TestUser user) {LOG.inf…...
【项目实训】各种反爬策略及爬虫困难点总结
在这里,我总结了本次项目的数据收集过程中遇到的反爬虫策略以及一些爬虫过程中容易出现问题的地方。 user-agent 简单的设置user-agent头部为浏览器即可: 爬取标签中带href属性的网页 对于显示岗位列表的页面,通常检查其源代码就会发现&…...

能量智慧流转:全面升级储能电站的智能网关解决方案
监控系统是电化学储能电站的关键组成部分,储能电站也需要相应的监控系统,通过监控系统对储能设备的状态进行监测,实时感知储能设备的健康状态,控制储能设备的充放电功率和时机等, 一个好的监控系统可以实现储能电站安全…...
【金融研究】6月,对冲基金狂卖美国科技股 短期乐观,长期悲观?“油价最大空头”花旗:明年跌到60
科技股新高的背后,是对冲基金与散户投资者的分歧,对冲基金正在向散户投资者出售创纪录数量的科技/半导体/美股“七姐妹”股票。 对冲基金狂卖美国科技股 在五大明星科技股(苹果、亚马逊、微软、英伟达、谷歌)轮番创下历史新高的…...
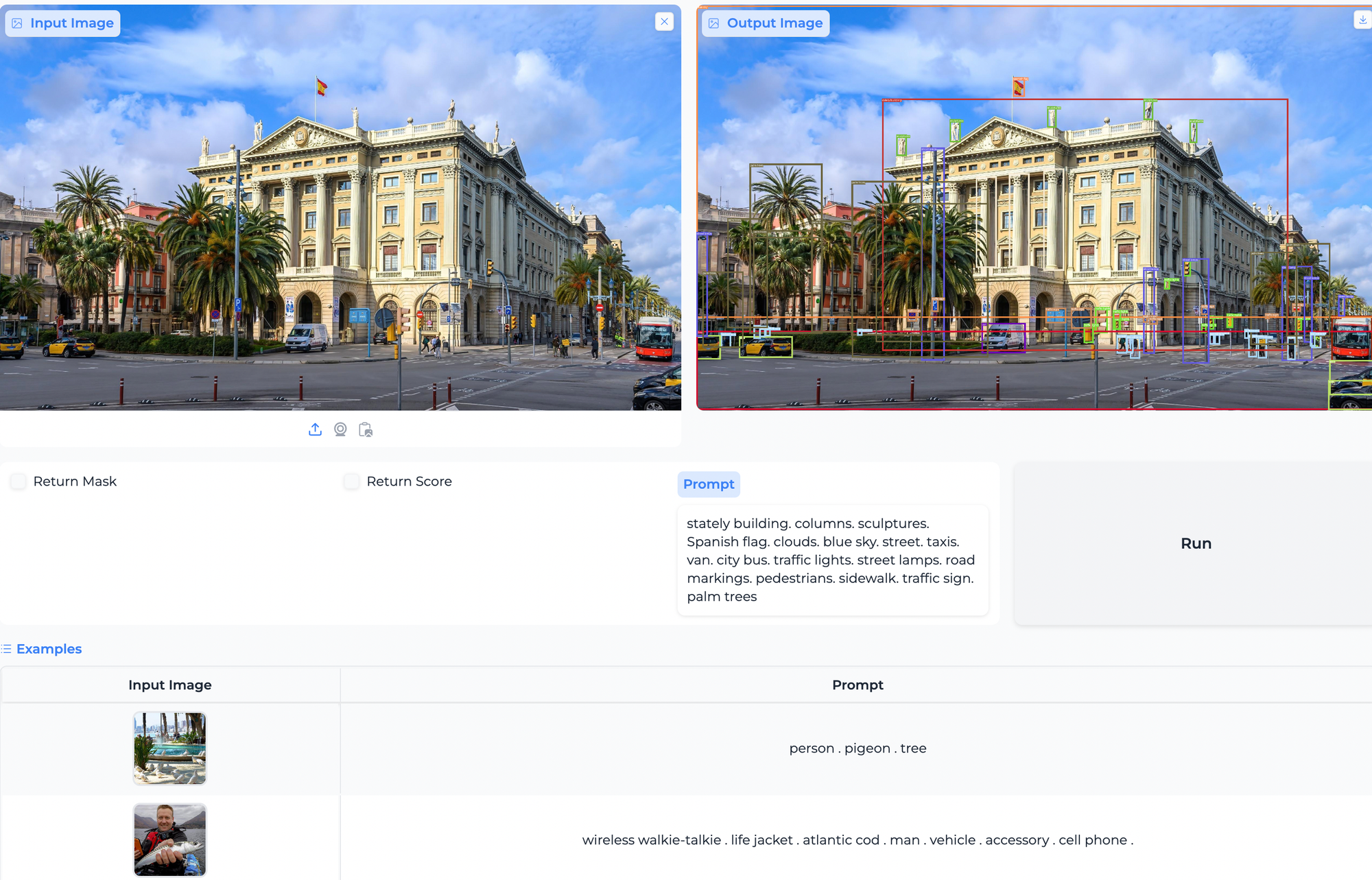
GroundingDINO1.5突破开放式物体检测界限:介绍与应用
《博主简介》 小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。 ✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~ 👍感谢小伙伴们点赞、关注! 《------往期经典推…...
centos编译内核ko模块
1、make报错 make: * /lib/modules/4.14.0-49.el7a.aarch64/build: 没有那个文件或目录。 停止。 [rootlocalhost 4.14.0-49.el7a.aarch64]# pwd /lib/modules/4.14.0-49.el7a.aarch64 [rootlocalhost 4.14.0-49.el7a.aarch64]# ll 总用量 1744 lrwxrwxrwx. 1 root root …...

Android13 WMS窗口层级树
1,认识层级树 可以通过dumpsys activity containers 看到 WMS 层级树的结构 ACTIVITY MANAGER CONTAINERS (dumpsys activity containers) ROOT typeundefined modefullscreen override-modeundefined requested-bounds[0,0][0,0] bounds[0,0][1440,2960]#0 Displa…...

计算机毕业设计Python+LSTM+Tensorflow股票分析预测 基金分析预测 股票爬虫 大数据毕业设计 深度学习 机器学习 数据可视化 人工智能
基于TensorFlow-LSTM的股票预测系统开题报告 一、研究背景与意义 随着信息技术的飞速发展,股票市场作为现代经济活动的重要组成部分,其价格波动受到广泛关注。投资者们迫切希望通过科学的方法预测股票价格,以优化投资决策,实现利…...

仓库管理系统14--仓库设置
1、添加窗体 <UserControl x:Class"West.StoreMgr.View.StoreView"xmlns"http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x"http://schemas.microsoft.com/winfx/2006/xaml"xmlns:mc"http://schemas.openxmlformats.…...
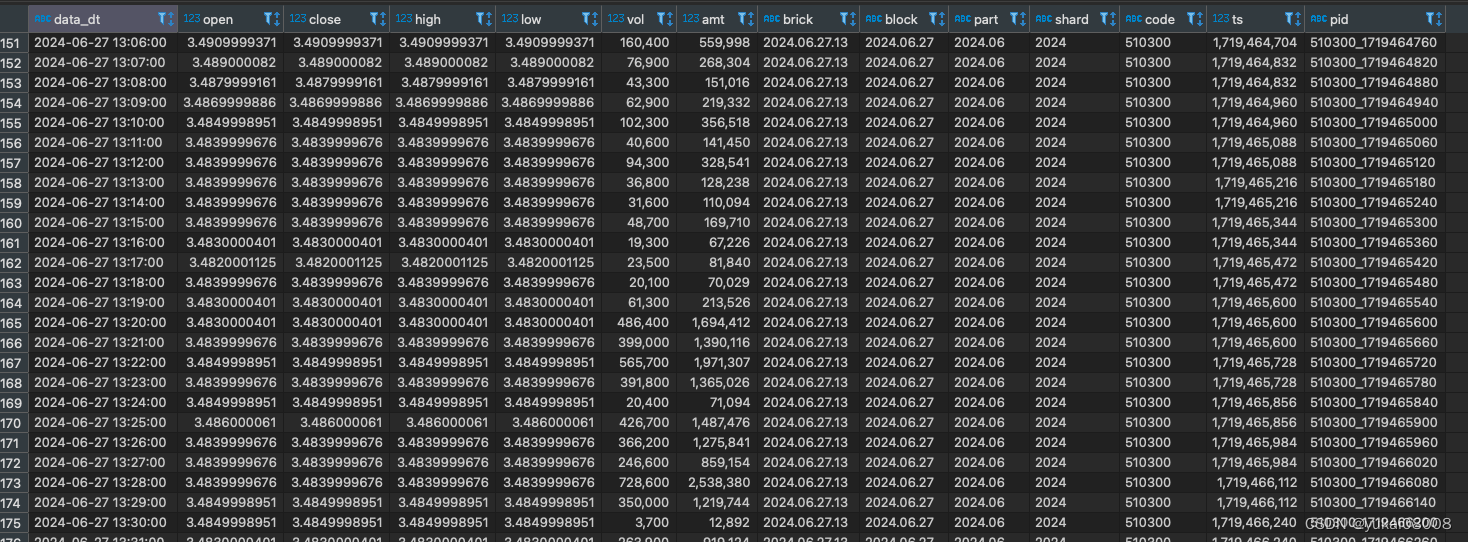
Python 算法交易实验73 QTV200第二步: 数据清洗并写入ClickHouse
说明 先检查一下昨天启动的worker是否正常工作,然后做一些简单的清洗,存入clickhouse。 内容 1 检查数据 from Basefuncs import * # 将一般字符串转为UCS 名称 def dt_str2ucs_blockname(some_dt_str):some_dt_str1 some_dt_str.replace(-,.).re…...

记录:有趣的C#多元运算符 ? : 表达式写法
有时候用 if //...Whatre you she wanna go else if //...do do do else //...and i know something just like this... 感觉代码太多了怎么优雅的、高端的替换? 看个高端的栗子菊: LedCOM["parity"] ledData[4] "N" ? …...

华宽通中标长沙市政务共性能力建设项目,助力智慧政务建设新飞跃
在数字化浪潮的推动下,长沙市政府正积极拥抱智慧城市建设,以科技力量提升政务服务效能。华宽通凭借其卓越的技术实力与丰富的项目经验,成功中标长沙市政务共性能力建设项目,这无疑是对华宽通在智慧城市领域实力的高度认可。 华宽…...

[面试题]计算机网络
[面试题]Java【基础】[面试题]Java【虚拟机】[面试题]Java【并发】[面试题]Java【集合】[面试题]MySQL[面试题]Maven[面试题]Spring Boot[面试题]Spring Cloud[面试题]Spring MVC[面试题]Spring[面试题]MyBatis[面试题]Nginx[面试题]缓存[面试题]Redis[面试题]消息队列[面试题]…...

企业级低代码开发效率变革赋能业务增长
企业级低代码开发已经成为当今软件开发领域的一大趋势,它为企业带来了前所未有的效率变革,从而赋能业务增长。本文将围绕这一主题,深入探讨低代码开发的概念、优势以及如何在企业级应用中实现高效的低代码开发,以助力我国企业实现…...
2024最新总结:1500页金三银四面试宝典 记录35轮大厂面试(都是面试重点)
学习是你这个职业一辈子的事 手里有个 1 2 3,不要想着去怼别人的 4 5 6,因为还有你不知道的 7 8 9。保持空瓶心态从 0 开始才能学到 10 全。 毕竟也是跳槽高峰期,我还是为大家准备了这份1500页金三银四宝典,记录的都是真实大厂面…...

ANSI转义序列封装:cursor-reset库实现终端光标精准控制
1. 项目概述与核心价值 最近在折腾一些自动化工具链,发现一个挺有意思的小项目,叫 zhitrend/cursor-reset 。乍一看名字,你可能会觉得这只是一个重置光标位置的小工具,但实际用下来,我发现它解决的痛点非常精准&…...

上海交通大学用1万条数据打败了工业界巨头的AI搜索神器
这项由上海交通大学研究团队主导完成的研究,以技术报告形式于2026年5月5日发布在预印本平台arXiv,编号为arXiv:2605.04036v1。对这一领域有深入兴趣的读者可以通过该编号检索完整论文。**一个让整个AI圈子都有些意外的故事**先说一个背景:现在…...

微信视频下载器wx_channels_download
微信视频下载器ltaoo/wx_channels_download(跨平台轻量首选) 特点:体积小、使用简单,在微信PC端视频下方添加“下载”按钮;支持 macOS 和 Windows。优点:集成式(无需单独监听)&…...

Laravel RSS聚合器larafeed:现代化内容聚合后端解决方案
1. 项目概述:一个为Laravel打造的现代化RSS聚合器如果你正在用Laravel构建一个内容聚合平台、新闻阅读器,或者只是想为自己的个人博客添加一个“我最近在读什么”的订阅墙,那么你很可能需要处理RSS或Atom源。手动解析这些XML格式的源、处理缓…...
)
别再死记硬背关键帧了!用Blender 2.83.9的Rigify,带你拆解走路动画的物理原理(附膝跳问题修复)
别再死记硬背关键帧了!用Blender 2.83.9的Rigify,带你拆解走路动画的物理原理(附膝跳问题修复) 当你第一次尝试用Blender制作走路动画时,是否遇到过这样的困境:明明按照教程一步步设置了关键帧,…...

应急通信无人机中继部署与覆盖率优化【附仿真】
✨ 长期致力于应急通信、无人机、中继部署、通信覆盖率、无人机部署数目研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅如需沟通交流,点击《获取方式》 (1)视距概率信道建模与高度部署&a…...

别再用重启就丢数据的流量统计了!OpenWrt上nlbwmon的持久化配置与性能优化全攻略
OpenWrt高级流量监控:nlbwmon持久化配置与性能优化实战 每次重启路由器后流量统计归零?图表加载慢到怀疑人生?这些问题困扰着许多OpenWrt用户。本文将带你深入解决nlbwmon的两大核心痛点——数据持久化和界面响应速度,打造一个真正…...

ArcGIS符号库“隐身”之谜:从DAO组件缺失到完整恢复的实战指南
1. 当符号选择器突然"罢工":一个GISer的崩溃瞬间 那天早上我正赶着完成客户的地图项目,准备给水系图层换个漂亮的蓝色符号。像往常一样双击图层打开属性窗口,点击Symbol Selector准备挑选样式时,整个人瞬间僵住了——本…...

边缘计算实战:基于 Linux Netns 与标准海事网关抵御局域网横向攻击的物理隔离架构
摘要:扁平化局域网极易遭受 ARP 欺骗与黑客横向攻击。本文记录了在标准工业级海事网关上基于 Linux netns 构建网络物理与逻辑隔离防线的实操复盘。 导语:在实操一个远洋船载网络的安全重构项目时,我们面临一个极其严峻的威胁模型࿱…...

别再只用默认样式了!LVGL Chart图表控件的10个美化技巧与高级样式配置
LVGL Chart图表控件进阶:10个专业级视觉优化技巧 在嵌入式GUI开发中,数据可视化是提升用户体验的关键环节。LVGL作为轻量级图形库的佼佼者,其Chart组件虽然开箱即用,但默认样式往往难以满足专业产品的视觉要求。本文将深入解析10个…...