英伟达(NVIDIA)数据中心GPU介绍
英伟达(NVIDIA)数据中心GPU按性能由高到低排行:
1. NVIDIA H100
架构:Hopper
核心数量:18352 CUDA Cores, 1456 Tensor Cores
显存:80 GB HBM3
峰值性能:
- 单精度(FP32):60 TFLOPS
- 双精度(FP64):30 TFLOPS
- Tensor Core:1000 TFLOPS (混合精度)
- 应用场景:H100是为下一代AI和HPC应用设计的,提供极高的计算密度和效率,是目前英伟达最强大的数据中心GPU。
2. NVIDIA A100
架构:Ampere
核心数量:6912 CUDA Cores, 432 Tensor Cores
显存:40 GB 或 80 GB HBM2e
峰值性能:
- 单精度(FP32):19.5 TFLOPS
- 双精度(FP64):9.7 TFLOPS
- Tensor Core:312 TFLOPS (混合精度)
- 应用场景:高性能计算(HPC)、深度学习训练和推理、大数据分析。A100在其发布时是市场上最强大的数据中心GPU,但现在被H100所超越。
3. NVIDIA V100
架构:Volta
核心数量:5120 CUDA Cores, 640 Tensor Cores
显存:16 GB 或 32 GB HBM2
峰值性能:
- 单精度(FP32):15.7 TFLOPS
- 双精度(FP64):7.8 TFLOPS
- Tensor Core:125 TFLOPS (混合精度)
- 应用场景:深度学习训练、高性能计算、科学计算。V100是许多AI研究机构和企业的首选。
4. NVIDIA A40
架构:Ampere
核心数量:10752 CUDA Cores, 336 Tensor Cores
显存:48 GB GDDR6
峰值性能:
- 单精度(FP32):37.4 TFLOPS
- 双精度(FP64):N/A
- Tensor Core:300 TFLOPS (混合精度)
- 应用场景:视觉计算、虚拟化工作站、AI推理等。A40在图形和AI推理性能方面表现优异。
5. NVIDIA T4
架构:Turing
核心数量:2560 CUDA Cores, 320 Tensor Cores
显存:16 GB GDDR6
峰值性能:
- 单精度(FP32):8.1 TFLOPS
- 双精度(FP64):0.25 TFLOPS
- Tensor Core:65 TFLOPS (混合精度)
- 应用场景:AI推理、图形处理、虚拟桌面基础设施(VDI)。T4以其高效的能耗比广受欢迎。
总结
- 顶级性能:H100 和 A100代表了当前数据中心GPU的顶尖性能,适用于最苛刻的计算任务。
- 高性能/成本比:V100 和 A40在性能与成本之间达到了良好的平衡,适用于广泛的应用场景。
- 高效能耗比:T4适用于能耗敏感的应用场景,尤其是在推理和图形处理方面表现出色。
相关文章:
数据中心GPU介绍)
英伟达(NVIDIA)数据中心GPU介绍
英伟达(NVIDIA)数据中心GPU按性能由高到低排行: 1. NVIDIA H100 架构:Hopper 核心数量:18352 CUDA Cores, 1456 Tensor Cores 显存:80 GB HBM3 峰值性能: 单精度(FP32)…...

Leetcode 3202. Find the Maximum Length of Valid Subsequence II
Leetcode 3202. Find the Maximum Length of Valid Subsequence II 1. 解题思路2. 代码实现 题目链接:3202. Find the Maximum Length of Valid Subsequence II 1. 解题思路 这一题的话是上一题3201. Find the Maximum Length of Valid Subsequence I的升级版&am…...

通过Spring Boot结合实时流媒体技术对考试过程进行实时监控
本章将深入探讨考试系统中常见的复杂技术问题,并提供基于Spring Boot 3.x的解决方案。涵盖屏幕切换检测与防护、接打电话识别处理、行为监控摄像头使用、网络不稳定应对等,每篇文章详细剖析问题并提供实际案例与代码示例,帮助开发者应对挑战&…...

智能扫地机器人避障与防跌落问题解决方案
智能扫地机器人出现避障与防跌落问题时,可以通过以下几种方式来解决: 一、避障问题的解决方案 1.升级避障技术: ① 激光雷达避障:激光雷达通过发射和接收激光信号来判断与障碍物的距离,具有延迟低、效果稳定、准确度…...
德旺训练营称重问题
这是考小学的分治策略,小学的分治策略几乎都是分三组。本着这个策略,我们做看看。 第一次称重: 分三组,16,16,17,拿两个16称,得到A情况,一样重,那么假铜钱在那组17个里面。B情况不…...

数据决策系统详解
文章目录 数据决策系统的核心组成部分:1. **数据收集与整合**:2. **数据处理与分析**:3. **数据可视化**:4. **决策支持**: 数据决策系统的功能:决策类型:数据决策系统对企业的重要性࿱…...

JSON 简述与应用
1. JSON 简述 JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,常用于客户端与服务器之间的数据传递。它基于JavaScript对象表示法,但独立于语言,可以被多种编程语言解析和生成。 1.1 特点 轻量级&#…...
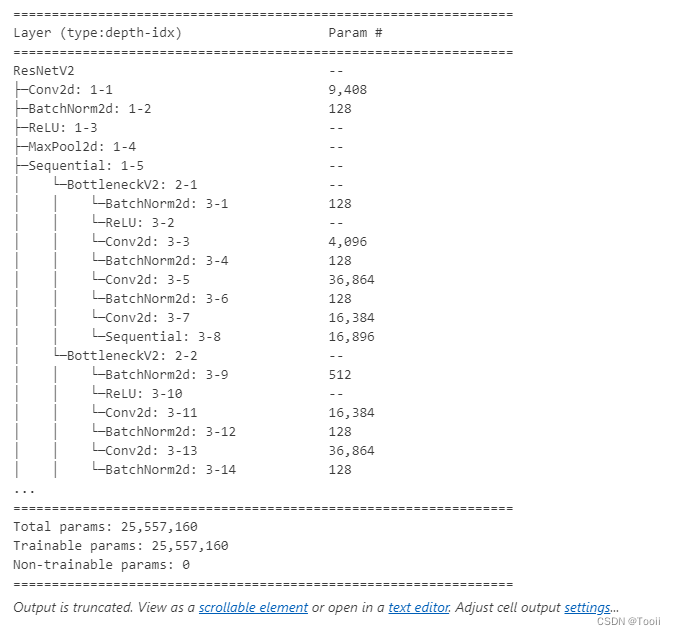
ResNet50V2
🍨 本文为🔗365天深度学习训练营 中的学习记录博客🍖 原作者:K同学啊 一、ResNetV1和ResNetV2的区别 ResNetV2 和 ResNetV1 都是深度残差网络(ResNet)的变体,它们的主要区别在于残差块的设计和…...

基于深度学习的虚拟换装
基于深度学习的虚拟换装技术旨在通过计算机视觉和图像处理技术,将不同的服装虚拟地穿在用户身上,实现快速的试穿和展示。这项技术在电商、时尚和虚拟现实领域具有广泛的应用,能够提升用户体验,增加互动性。以下是关于这一领域的系…...

单段时间最优S型速度规划算法
一,背景 在做机械臂轨迹规划的单段路径的速度规划时,除了参考《Trajectory Planning for Automatic Machines and Robots》等文献之外,还在知乎找到了这位大佬 韩冰 写的在线规划方法: https://zhuanlan.zhihu.com/p/585253101/e…...

pom文件-微服务项目结构
一、微服务项目结构 my-microservices-project/ ├── pom.xml <!-- 父模块的pom.xml --> ├── ry-system/ │ ├── pom.xml <!-- 子模块ry-system的pom.xml --> │ └── src/main/java/com/example/rysystem/ │ └── RySystemApplication.…...

解析Kotlin中的Nothing【笔记摘要】
1.Nothing的本质 Nothing 的源码很简单: public class Nothing private constructor()可以看到它是个class,但它的构造函数是 private 的,这就导致我们没法创建它的实例,并且在源码里 Kotlin 也没有帮我们创建它的实例。 基于这…...

toRefs 和 toRef
文章目录 toRefs 和 toReftoRefstoRef toRefs 和 toRef toRefs toRefs 把一个由reactive对象的值变为一个一个ref的响应式的值 import { ref, reactive, toRefs, toRef } from vue; let person reactive({name: 张三,age: 18, }); // toRefs 把一个由reactive对象的值变为一…...
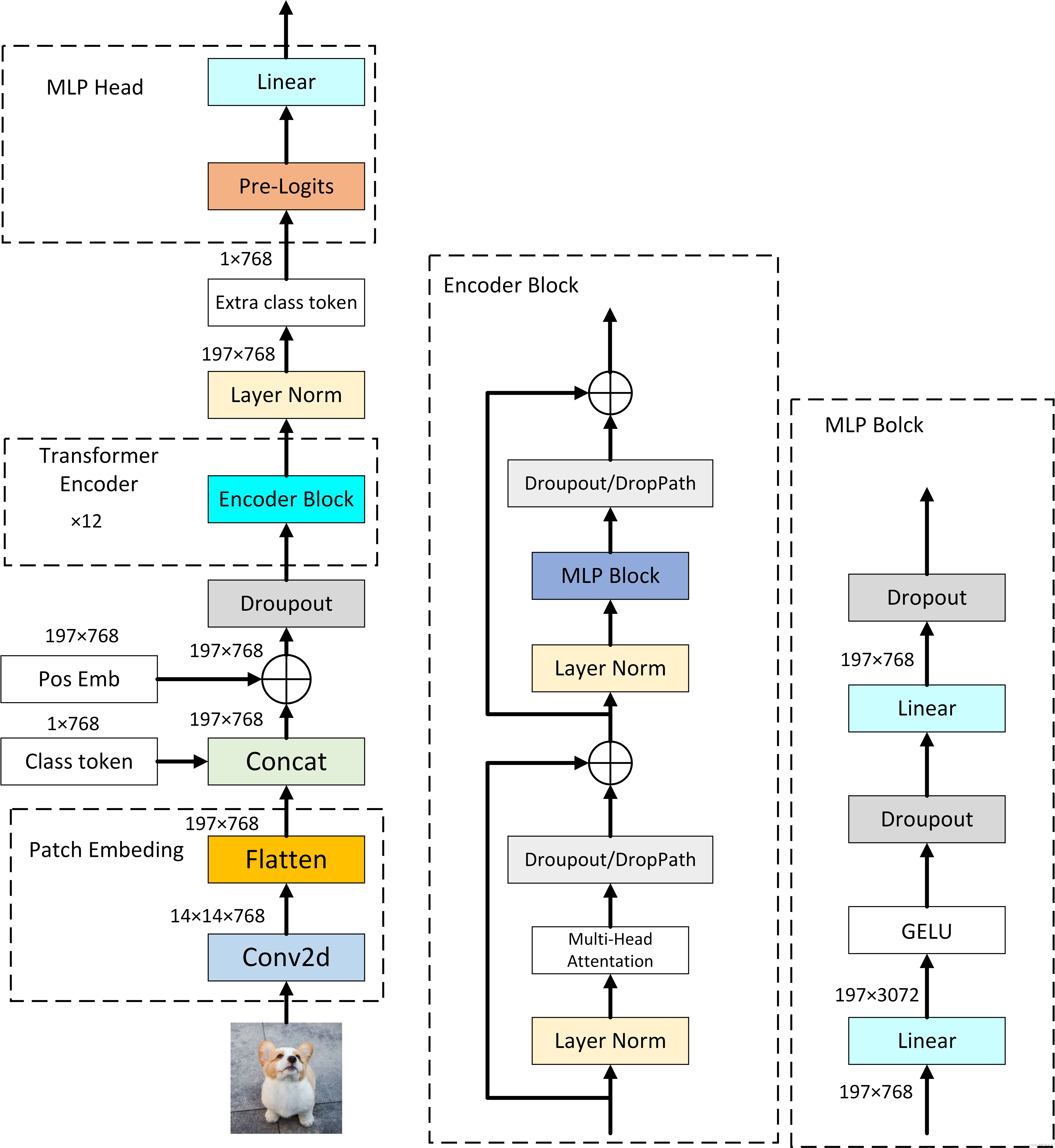
Vision Transformer论文阅读笔记
目录 An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale -- Vision Transformer摘要Introduction—简介RELATED WORK—相关工作METHOD—方法VISION TRANSFORMER (VIT)—视觉Transformer(ViT) 分析与评估PRE-TRAINING DATA REQUIREMENTS—预训练数据…...

MapReduce的执行流程排序
MapReduce 是一种用于处理大规模数据集的分布式计算模型。它将作业分成多个阶段,以并行处理和分布式存储的方式来提高计算效率。以下是 MapReduce 的执行流程以及各个阶段的详细解释: 1. 作业提交(Job Submission) 用户通过客户端…...

雅思词汇及发音积累 2024.7.3
银行 check (美)支票 cheque /tʃek/ (英)支票 ATM 自动取款机 cashier 收银员 teller /ˈtelə(r)/ (银行)出纳员 loan 贷款 draw/withdraw money 提款 pin number/passsword/code …...

Vue2和Vue3的区别Vue3的组合式API
一、Vue2和Vue3的区别 1、创建方式的不同: (1)、vue2:是一个构造函数,通过该构造函数创建一个Vue实例 new Vue({})(2)、Vue3:是一个对象。并通过该对象的createApp()方法,创建一个vue实例。 Vue…...

ML307R OpenCPU HTTP使用
一、函数介绍 二、示例代码 三、代码下载地址 一、函数介绍 具体函数可以参考cm_http.h文件,这里给出几个我用到的函数 1、创建客户端实例 /*** @brief 创建客户端实例** @param [in] url 服务器地址(服务器地址url需要填写完整,例如(服务器url仅为格式示…...

【状态估计】线性高斯系统的状态估计——离散时间的递归滤波
前两篇文章介绍了离散时间的批量估计、离散时间的递归平滑,本文着重介绍离散时间的递归滤波。 前两篇位置:【状态估计】线性高斯系统的状态估计——离散时间的批量估计、【状态估计】线性高斯系统的状态估计——离散时间的递归平滑。 离散时间的递归滤波…...
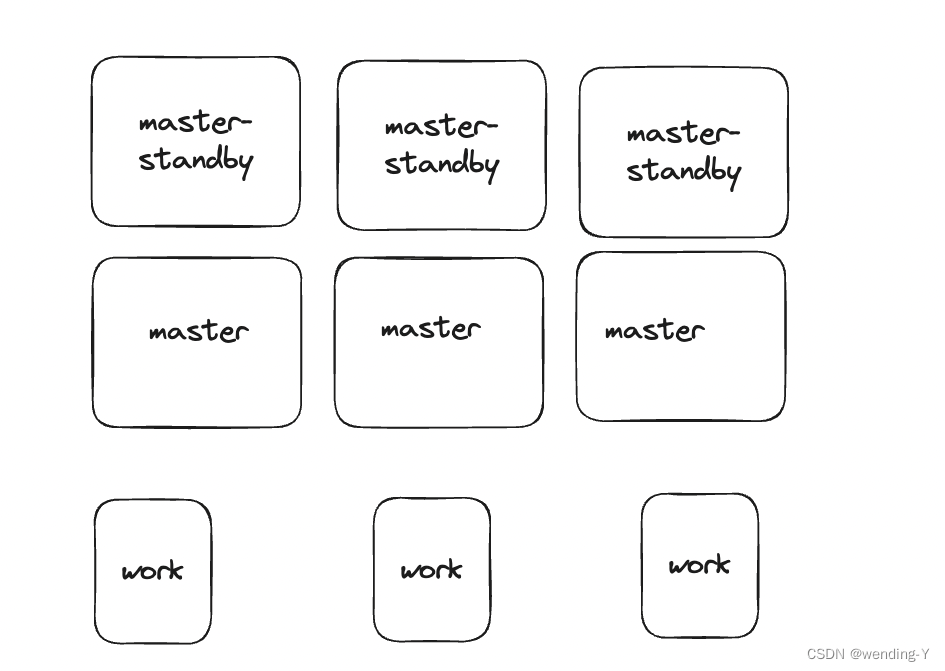
架构设计上中的master三种架构,单节点,主从节点,多节点分析
文章目录 背景单节点优点缺点 主从节点优点缺点 多节点优点缺点 多节点,多backup设计优点缺点 总结 背景 在很多分布式系统里会有master,work这种结构。 master 节点负责管理资源,分发任务。下面着重讨论下master 数量不同带来的影响 单节点 优点 1.设…...

基于2D工程图几何特征与梯度提升模型的制造成本智能预测
1. 项目概述:从图纸到报价的智能革命在制造业,尤其是像汽车零部件这样的离散制造领域,报价速度直接决定了订单的生死。传统上,拿到一张新的2D工程图(DWG格式),成本工程师需要花上几天甚至几周时…...

DeepSeek系统设计辅助效能断崖式下降的3个信号,第2个90%工程师至今未察觉!
更多请点击: https://kaifayun.com 第一章:DeepSeek系统设计辅助效能断崖式下降的3个信号,第2个90%工程师至今未察觉! 当 DeepSeek 的系统设计辅助能力突然变“笨”——接口建议频繁失准、上下文感知错乱、生成代码无法通过基础编…...

AI算力要上天?别笑,太空数据中心真能干翻地球电费!
前言你有没有算过,训练一个大模型,相当于烧掉多少吨煤?如今AI狂飙突进,算力需求指数级增长,可地球上的电——不够用了!更别说建个数据中心还得跟地方政府“斗智斗勇”,抢地皮、配储能、扛审批&a…...
)
ArduPilot飞行模式实战:从代码角度看Stabilize、Acro、Loiter模式如何切换(附避坑指南)
ArduPilot飞行模式深度解析:从状态机到实战避坑指南 在开源飞控领域,ArduPilot以其强大的飞行模式系统著称。不同于普通用户只需了解模式功能,开发者更需要掌握模式切换的底层机制——这直接关系到飞行安全与二次开发效率。本文将带您深入Sta…...

Nacos CVE-2021-29441漏洞深度解析:User-Agent绕过与鉴权失效
1. 这个漏洞不是“改个Header就能登录”,而是Nacos鉴权体系的一道裂缝CVE-2021-29441这个编号在Nacos社区里曾被轻描淡写地归为“低危”,直到我接手一个金融客户线上告警——他们的Nacos集群在凌晨三点被批量创建了37个高权限用户,所有操作日…...

【国家级攻防演练级建议】:DeepSeek私有化部署中4类隐蔽后门植入路径与实时检测方案
更多请点击: https://kaifayun.com 第一章:DeepSeek私有化部署中隐蔽后门植入的攻防对抗本质 在私有化场景下,DeepSeek模型的部署链路常跨越镜像构建、权重加载、推理服务启动及API网关接入等多个环节。攻击者可利用构建上下文污染、依赖包劫…...

独立开发者如何利用Taotoken的TokenPlan在项目初期有效控制AI实验成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken的TokenPlan在项目初期有效控制AI实验成本 对于独立开发者或学生而言,在构建AI应用原型时&…...

3步解决英雄联盟回放难题:ROFL-Player终极使用指南
3步解决英雄联盟回放难题:ROFL-Player终极使用指南 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 你是否曾经遇到过这样的烦…...
)
一文讲透|高效论文写作全流程AI论文工具推荐(2026 最新)
论文写作全流程可拆解为文献调研→选题/开题→大纲/初稿→文献综述→降重/去AI味→润色/格式→查重/投稿七大环节,以下工具按环节精准匹配,兼顾中文适配、降重能力、去AI痕迹、学术合规四大核心需求,覆盖免费/付费、通用/垂直场景。2026年&am…...

告别AWCC臃肿:AlienFX Tools终极轻量级Alienware控制方案
告别AWCC臃肿:AlienFX Tools终极轻量级Alienware控制方案 【免费下载链接】alienfx-tools Alienware systems lights, fans, and power control tools and apps 项目地址: https://gitcode.com/gh_mirrors/al/alienfx-tools 你是否厌倦了Alienware Command C…...