RT2-使用NLP的方式去训练机器人控制器
目标
研究在网络数据上训练的视觉语言模型也可以直接结合到端到端的机器人控制中,提升泛化性以及获得突出的语义推理;使得单个的端到端训练模型可以同时学习从机器人观测到动作的映射,这个过程可以受益于基于网络上的语言和视觉语言数据的预训练。
方法
1,将动作(actions)描述成文本tokens,然后将其直接合到模型训练集中,使用方法就如自然语言tokens一样;
2,结合使用chain of thought 推理,使得RT2可以进行多阶段语义推理,比如推理出哪种饮料对于劳累的人是合适的。

模型
模型直接使用PalmE或者PalmX,无额外创新,创新主要体现在机器人数据的训练方式上。

Pali-X:使用ViT-22B处理图像,接收n张图像,获得n x k的tokens(k是图像的patch数量),图像tokens经过一个projections层,然后进入一个编码-解码的backbone(32B 参数和50层,类似于UL2,联合处理图像和文本embeddings,采用自回归方式输出tokens),
PaLI-3B使用更小的ViT-G/14来处理图像,使用UL2-3B来进行编码和解码
Palm-E:使用PaLM-E-12B,图像处理使用ViT-4B,LLM使用Palm。

动作推理与实时编码
1,To enable vision-language models to control a robot, they must be trained to output actions. We take a direct approach to this problem, representing actions as tokens in the model’s output, which are treated in the same way as language tokens 将动作用文本token来进行描述,使得大语言模型可以直接输出动作;
2,The action space consists of 6-DoF positional and rotational displacement of the robot end-effector, as well as the level of extension of the robot gripper and a special discrete command for terminating the episode, which should be triggered by the policy to signal successful completion.(与RT1定义一样,定义了相关动作)
3,The continuous dimensions (all dimensions except for the discrete termination command) are discretized into 256 bins uniformly. Thus, the robot action can be represented using ordinals of the discrete bins as 8 integer numbers.(连续动作离散化,与RT1一致)
4,In order to use these discretized actions to finetune a vision-language into a vision-language-action model, we need to
associate tokens from the model’s existing tokenization with the discrete action bins. (将离散的动作bins关联到VLM已有的tokenization )
5, In order to define a target for VLM fine-tuning we convert the action vector into a single string by simply concatenating action tokens for each dimension with a space character: (根据actions输出目标,示例:
“terminate Δpos Δpos Δpos Δrot Δrot Δrot gripper_extension”. “1 128 91 241 5 101 127”)
6,PaLI-X and PaLM-E , use different tokenizations. For PaLI-X, integers up to 1000 each have a unique token, so we simply associate the action bins to the token representing the corresponding integer. For the PaLM-E model, which does not provide this convenient representation of numbers, we simply overwrite the 256 least frequently used tokens to represent the action vocabulary. (在PaLI-X和PaLM-E中使用不同的tokenizations方法)
7, Cloud service multi-TPU,The largest model we evaluated, the 55B parameter RT-2-PaLI-X-55B model, can run at a frequency of 1-3 Hz. The smaller version of that model, consisting of 5B parameters, can run at a frequency of around 5 Hz.(部署在云端进行实施推理)
训练数据集
主要数据: WebLI dataset(10B image-text pairs across 109 languages, filtered to the top 10% scoring cross-modal similarity examples to give 1B training examples)
其他视觉语言数据:captioning and vision question answering datasets in PaLI-X and PaLM-E
机器人数据: RT-1和Language table
实验
1,How does RT-2 perform on seen tasks and more importantly, generalize over new objects, backgrounds, and environments? RT2在见过的任务上表现如何?更重要的是在新物体,背景和环境上的泛化能力如何?



2,Can we observe and measure any emergent capabilities of RT-2?我们可以观察和测量到RT2的任何新能力吗?
该实验是评估RT2从网络数据中学习到的机器人数据以外的技能,体现网络数据对其帮助。



3,How does the generalization vary with parameter count and other design decisions? 泛化性随着参数量和其他设计模块如何变化?
From scratch: 从头开始训练模型,不使用任何VLM模型的预训练权重;
Fine-Tuned: 只使用机器人数据来微调之前训好的预训练模型;
Co-Fine-Tuned: 同时使用原始VLM训练数据和机器人数据对VLM模型进微调。


4,Can RT-2 exhibit signs of chain-of-thought reasoning similarly to vision-language models? RT2可以使用思维链符号来做到类似VLM的推理吗?

局限性与未来工作
1, 我们展示了使用web-scale数据集来进行预训练,因为其可以提高语义和视觉概念上的泛化性,但机器人并没从这些经验中学习到任何新动作,机器人的物理技能仍然受限于机器人数据中见过的技能分布,但是它学会了用新的方式去使用这些技能。我们认为这是因为网络数据集并没在技能层次有很好的分布。因此一个激动人心的未来方向将是研究新技能如何能从新数据采集方式中获得,如人类视频这类数据;
2,尽管我们展示了可以实时运行大规模的VLA模型,其计算量非常大, 因为这些模型被应用于高频控制中,实时推理可能会成为一个瓶颈。对应的未来工作是探索量化和知识蒸馏技术来降低算力。这也关联到另一个限制,当前可用与创造RT2的VLM模型有限,期待更多轻量级的VLM模型可被使用(e.g. https://llava-vl.github.io/) 。
个人见解
该工作很硬核,也很谷歌,硬核在于使用了一种大家都不看好的方式,用VLM这种语言模式来实现机器人控制,同时能从网络数据中获得一定的泛化能力,很谷歌是指这种工作也只有具备大算力大模型大数据大投入的谷歌公司才可以研究。总结来说,训练方式上带来了很大的创新,但如何使得其可以真正落地应用,作者指出了一些路径,如果有团队肯下大力气攻坚,也还是有希望的。
相关文章:
RT2-使用NLP的方式去训练机器人控制器
目标 研究在网络数据上训练的视觉语言模型也可以直接结合到端到端的机器人控制中,提升泛化性以及获得突出的语义推理;使得单个的端到端训练模型可以同时学习从机器人观测到动作的映射,这个过程可以受益于基于网络上的语言和视觉语言数据的预训…...

VisActor vs ECharts: 哪个更适合你的数据可视化需求?
VisActor vs ECharts: 哪个更适合你的数据可视化需求? 在当今数据驱动的世界里,选择合适的数据可视化工具是至关重要的。ECharts作为广受欢迎的可视化库,已经在行业内拥有了长久的历史和广泛的用户基础。然而,VisActor作为新兴的…...
【QT中实现摄像头播放、以及视频录制】
学习分享 1、效果图2、camerathread.h3、camerathread.cpp4、mainwindow.h5、mainwindow.cpp6、main.cpp 1、效果图 2、camerathread.h #ifndef CAMERATHREAD_H #define CAMERATHREAD_H#include <QObject> #include <QThread> #include <QDebug> #include &…...

el-table封装popver組件,点击列筛选行数据功能,支持筛选,搜索,排序功能
子组件: <template><div class"tableTool" ref"tableTool" click.stop><el-button click"shengFnc">升序</el-button><el-button click"jiangFnc">降序</el-button><el-input v-m…...
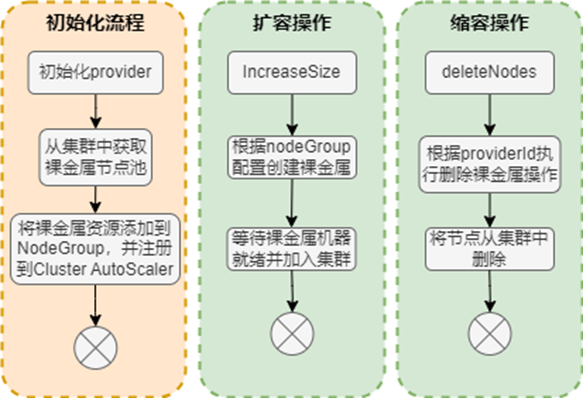
基于DPU的云原生计算资源共池管理解决方案
1. 方案背景和挑战 在传统的云环境中,通常存在着不同的技术栈,支撑多样化的计算服务,具体如下: ① OpenStack环境与虚拟化云主机及裸金属服务 OpenStack是一个开源的云计算管理平台项目,它提供了部署和管理大规模计…...

Bugly并非无所不能
在 iOS 应用因为内存占用过大而被系统 killed 的情况下,Bugly 以及大多数崩溃报告工具是无法捕获到这种类型的崩溃信息的。原因在于,当系统由于内存压力过大而终止应用时,是直接将应用进程杀死,不会触发常规的崩溃处理流程&#x…...

2024年信息系统项目管理师1批次上午客观题参考答案及解析(3)
51、探索各种选项,权衡包括时间与成本、质量与成本、风险与进度、进度与质量等多种因素,在整个过程中,舍弃无效或次优的替代方案,这种不确定性应对方法是()。 A.集合设计 B.坚韧性 C.多种结果…...

YOLOv8改进 | 注意力机制 | 对密集和小目标友好的EVAblock 【原理 + 完整代码】
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转 💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏目录 :《YOLOv8改进有效…...

高效前端开发:解密pnpm的存储与链接
什么是pnpm PNPM(Performant NPM)是一种快速且节省磁盘空间的包管理工具。相较于其他包管理器如NPM和Yarn,PNPM通过独特的存储机制和链接技术解决了许多常见的问题。以下是PNPM如何避免这些问题以及其关键技术的详细介绍。 特性 PNPM Store…...

设置单实例Apache HTTP服务器
配置仓库 [rootlocalhost ~]# cd /etc/yum.repos.d/ [rootlocalhost yum.repos.d]# vi rpm.repo仓库代码: [BaseOS] nameBaseOS baseurl/mnt/BaseOS enabled1 gpgcheck0[AppStream] nameAppStream baseurl/mnt/AppStream enabled1 gpgcheck0挂载 [rootlocalhost …...

Python | Leetcode Python题解之第221题最大正方形
题目: 题解: class Solution:def maximalSquare(self, matrix: List[List[str]]) -> int:if len(matrix) 0 or len(matrix[0]) 0:return 0maxSide 0rows, columns len(matrix), len(matrix[0])dp [[0] * columns for _ in range(rows)]for i in…...

使用Python实现线性拟合
如下 Python 代码主要用于处理和分析数据,并使用 Matplotlib 库绘制出数据的拟合曲线。它的主要步骤包括数据预处理、进行线性回归分析,并根据结果绘图展示。下面是对代码及其所引用库的详细解释: 引用的库 numpy (np): 用于进行数值计算。这…...

如何在浏览器控制台Console中引入外部 JS
想要在某个网页执行一些脚本,却发现某个工具类,如 ajax 请求的 axios 该网页没有引入,或者引入了但控制台却访问不到,这时要怎么办呢? 只需要控制台执行如下代码就好了 var script document.createElement(script);…...

后端——全局异常处理
一、老办法try-catch 当我们执行一些错误操作导致程序报错时,程序会捕捉到异常报错,这个异常会存在一个Exception对象里 那我们在spring boot工程开发时,当我们执行一个sql查询时报错了,那就会从最底层的Mapper层捕捉到Exceptio…...

软件开发面试题(C#语言,.NET框架)
1. 解释什么是委托(Delegate),并举例说明它在C#中的用法。 委托是一种引用类型,它可以用于封装一个或多个方法。委托对象可以像方法一样调用,甚至可以用于创建事件处理程序。委托是C#中实现事件和回调函数的重要机制。…...

Spring学习04-[Spring容器核心技术AOP学习]
AOP学习 AOP介绍使用对业务方法添加计算时间的增强 EnableAspectJAutoProxyAOP的术语通知前置通知Before后置通知After返回通知AfterReturning异常通知AfterThrowing总结-通知执行顺序 切点表达式的提取-使用Pointcut进行抽取切点表达式的详细用法execution和annotation组合 Sp…...
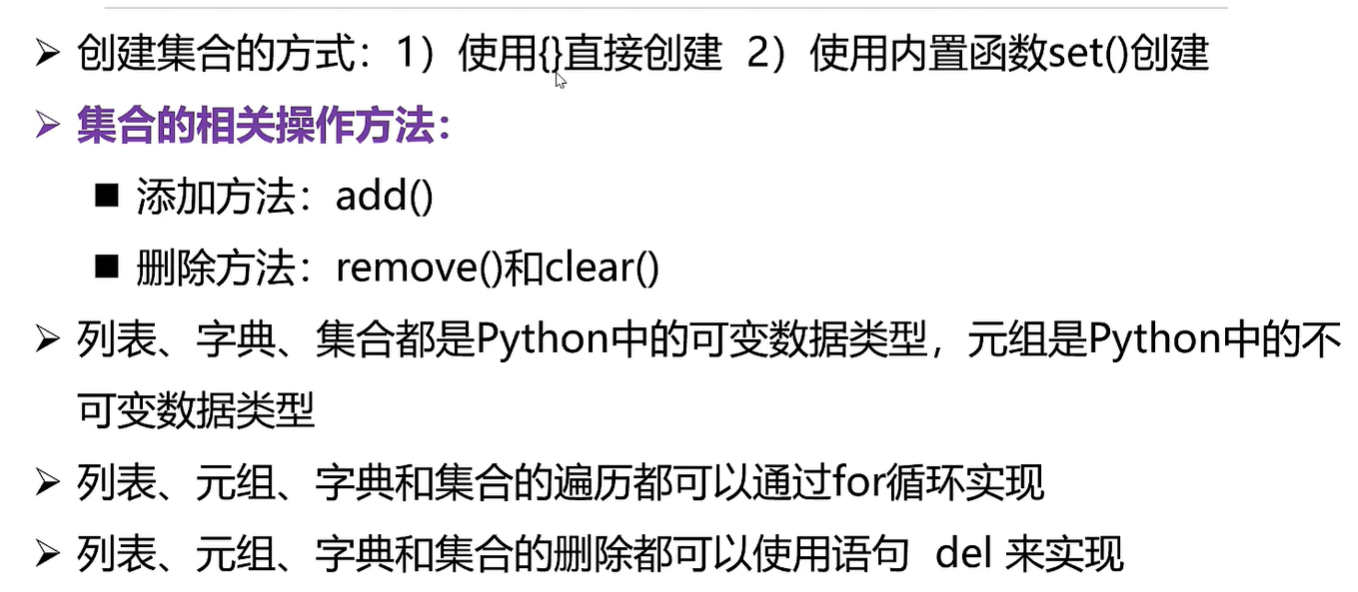
第5章-组合序列类型
#全部是重点知识,必须会。 了解序列和索引|的相关概念 掌握序列的相关操作 掌握列表的相关操作 掌握元组的相关操作 掌握字典的相关操作 掌握集合的相关操作1,序列和索引 1,序列是一个用于存储多个值的连续空间,每一个值都对应一…...

大话光学原理:2.最短时间原理、“魔法石”与彩虹
一、最短时间原理 1662年左右,费马在一张信纸的边角,用他那著名的潦草笔迹,随意地写下了一行字:“光在两点间选择的路,总是耗时最少的。”这句话,简单而深邃,像是一颗悄然种下的种子,…...

spring tx @Transactional 详解 `Advisor`、`Target`、`ProxyFactory
在Spring中,Transactional注解的处理涉及到多个关键组件,包括Advisor、Target、ProxyFactory等。下面是详细的解析和代码示例,解释这些组件是如何协同工作的。 1. 关键组件介绍 1.1 Advisor Advisor是一个Spring AOP的概念,它包…...
)
`CyclicBarrier` 是 Java 中的一个同步辅助工具类,它允许一组线程相互等待,直到所有线程都达到了某个公共屏障点(barrier point)
CyclicBarrier 是 Java 中的一个同步辅助工具类,它允许一组线程相互等待,直到所有线程都达到了某个公共屏障点(barrier point)。当所有线程都到达屏障点时,它们可以继续执行后续操作。CyclicBarrier 的特点是可以重复使…...

树莓派NOOBS安装指南:从SD卡准备到系统配置全流程详解
1. 项目概述:为什么选择NOOBS作为树莓派入门首选如果你刚拿到一块树莓派,看着这块小小的电路板,第一反应可能是兴奋,紧接着就是困惑:我该怎么让它“活”过来?对于嵌入式开发、物联网原型搭建,甚…...

激光雷达仿真:禾赛与NVIDIA联手,如何用数字孪生重塑自动驾驶研发?
1. 项目概述:当激光雷达遇上数字孪生最近,禾赛科技和NVIDIA的合作又往前迈了一大步,这事儿在自动驾驶圈子里挺受关注的。简单来说,就是禾赛的激光雷达模型,现在可以直接在NVIDIA的DRIVE Sim仿真平台里调用了。这意味着…...

SaaS ERP和传统ERP,到底差在哪?
这几年,ERP这个词越来越火。但有意思的是,很多企业老板、管理层,甚至已经在用ERP的人,其实都没真正分清:“SaaS ERP”和“传统ERP”,到底差在哪。很多人会觉得:“不都是ERP吗?不就是…...

终极ncmdumpGUI指南:3步快速解密网易云音乐NCM文件
终极ncmdumpGUI指南:3步快速解密网易云音乐NCM文件 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI ncmdumpGUI是一款基于C#开发的Windows图形界面工…...

思科CCNA认证备考:从题库到实战,这11个章节的易错点你踩过几个?
思科CCNA认证通关指南:11大核心章节的深度避坑策略 从题库到实战的认知跃迁 当您翻开CCNA的备考资料时,是否曾感到困惑——即使熟记题库答案,在实际操作和模拟考试中仍频频出错?这种现象在认证考生中极为普遍。问题的根源往往不在…...

对比自行维护多个 API 密钥,使用 Taotoken 在管理上轻松许多
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比自行维护多个 API 密钥,使用 Taotoken 在管理上轻松许多 作为一名个人开发者,我曾长期在多个大模型服务…...

Sora-FullStack全栈开发框架:构建AI视频生成应用的工程实践
1. 项目概述:一个全栈式Sora应用开发框架的诞生最近在AI视频生成领域,Sora的横空出世无疑点燃了无数开发者和创业者的热情。但兴奋过后,一个现实问题摆在眼前:如何将Sora这类前沿模型的能力,真正落地成一个稳定、可用、…...
)
ESP32项目编译后,如何看懂Output里的内存占用(DRAM/IRAM/Flash详解)
ESP32项目编译后内存占用分析:从DRAM到Flash的深度解读 当你在VSCode中按下编译按钮,看到终端输出那一连串内存占用数据时,是否曾感到困惑?这些数字背后隐藏着ESP32内存架构的秘密,也直接关系到你的项目性能和稳定性。…...

修一个Bug,引入另一个Bug:从Tomcat高危漏洞看中间件安全修复的困境
攻击者无需认证,仅需向集群通信端口发送构造数据,即可绕过加密校验并触发反序列化,实现远程代码执行。这个漏洞的特殊之处在于——它是官方修复上一个漏洞时“顺手”引入的。2026年5月,Apache Tomcat官方披露了一个高危漏洞CVE-20…...

从莎士比亚到鲁迅,NotebookLM辅助文学研究全流程,深度拆解7类文本生成陷阱与规避方案
更多请点击: https://codechina.net 第一章:NotebookLM在文学研究中的范式革命 传统文学研究长期依赖人工细读、索引比对与跨文本联想,耗时且易受主观经验局限。NotebookLM 以“源文档优先”(source-first)架构重构人…...