2024年自动驾驶SLAM面试题及答案(更新中)
卡尔曼滤波(Kalman filter)是一种高效的自回归滤波器,它能在存在诸多不确定性情况的组合信息中估计动态系统的状态,是一种强大的、通用性极强的工具。它的提出者,鲁道夫.E.卡尔曼,在一次访问NASA埃姆斯研究中心时,发现这种方法能帮助解决阿波罗计划的轨道预测问题,后来NASA在阿波罗飞船的导航系统中确实也用到了这个滤波器。最终,飞船正确驶向月球,完成了人类历史上的第一次登月。
2、你认为ORB-SLAM3和VINS-Fusion的几个不同点?
(1)在IMU的偏差方面:ORB-SLAM3同时考虑了加速度计和陀螺仪的偏差,并且将其放在目标函数中与重力方向,尺度因子等待优化变量共同优化,在inertialoptimization函数中;VINS只估计了陀螺仪的偏差,并且是将其考虑成非线性的,将其独立出来单独优化,没有采用g2o求解器,而是直接一次高斯牛顿迭代解决,在initial_alignment.cpp中的solverGyroscopeBias中。
(2)在速度,重力,尺度因子方面:ORB-SLAM3与IMU偏差共同估计,通过最大后验估计并取负对数将其转换成包含IMU先验残差的非线性最小二乘问题,利用g2o去求解inertial-only map下的因子图,速度,尺度与重力方向都是顶点;initia_alignment.cpp中的linearalignment(),首先根据预积分量的约束,将世界坐标系转换成相机在t0时刻的坐标系,转换成线性最小二乘问题ceres求解。
(3)在IMU的优化内容方面:ORB-SLAM3的inertialoptimization中默认各个关键帧对应的IMU的pose是一致的,只优化了IMU的速度,在初始化成功后的5秒和15秒又再次初始化;VINS状态估计器中的Estimator::visualInitialAlign(),计算陀螺仪的偏置校准(加速度偏置没有处理),同时更新了Bgs后,IMU repropagate;得到尺度s和重力g的方向后,转换到第一帧坐标系,然后转换到世界坐标系。
(4)在重力g的优化方面:ORB-SLAM3代码中在g与速度等待优化变量的目标函数求解后直接对齐,得出结果,没有看到更多的判断;VINS在linearalignment中RefineGravity进一步细化了重力,在其切线空间上用两个变量重新参数化重力,迭代四次,对状态向量重新优化。
(5)在惯性系的对齐方面:ORB-SLAM3在IMU的优化过程中目标函数求解过程同时解算除了优化后的rotation matrix;VINS计算出重力在第一个关键帧的测量值后对重力进行参数化,限制模长,判断误差是否大于百分之五,然后重力细化,进行坐标系的对齐。
(6)在scale的优化方面:ORB-SLAM3在初始化及其之后的100秒之内不断优化尺度和重力方向;VINS只在初始化的过程进行优化。
(7)在求解形式方面:ORB-SLAM3使用SO(3)求解;VINS使用四元数求解。
3、粒子滤波器设计时,重采样的作用及如何实现?
重采样主要是为了解决经典蒙特卡洛方法中出现的粒子匮乏现象。其主要思想是对粒子和其相应的权值表示的概率密度函数重新进行采样。通过增加权值较大粒子和减少权值较小粒子来实现。重采样虽然可以改善粒子匮乏现象,但也降低了粒子的多样性。因此,重采样过程中一般选取一些准则来判断有效粒子的个数,通过这个个数来判断是否进行重采样。
4、IMU相对车体安装角度误差如何标定?
如果条件允许(具有通视条件等),可以通过光学标定安装基准面。如果不具备光学标定条件,可以将IMU安装到位 ,让载体运动起来,接入外部速度和位置等基准信息,将安装误差引入状态方程,通过迭代让其收敛。如果载体可以整体放到转台上,也可以利用重力加速度矢量和转台参考信息对其标定。
5、如何应对gnss缓慢漂移的问题
1、静态漂移。当GPS终端静止的时候,其定位坐标在某个范围不停地变化,甚至还会显示出速度,这便是静态漂移。
2、定位点漂移。定位点漂移指两点之间的漂移距离超过100米或芯片软件设置的门限距离,且无速度数据,过一段时间后又以同样的距离回到原点。这种情况常反映在星历气候,模块干扰,2D定位和3D定位瞬间变化的过程中。此漂移方向没规律性,较难处理。
3、定位精度漂移。常反映在运动过程中,突然在某一点漂移出去,然后又瞬间漂移回来,有时带有速度,有时不带速度数据。多为信号折射干扰引起,突然有一个很强的折射信号参与定位所致。折射信号一丢失,又恢复正常定位精度。
4、叠加漂移。多反映在2D定位时,定位点沿着一定的方向连续漂移,每个点之间的距离不大,并带有速度,当漂移到一定距离后,又慢慢地漂移回原点。此漂移一般是由于GSP模块长时间处于弱信号,或设备受到干扰引起。
——————————————————————
更多内容(看第一段标蓝部分),持续更新中
相关文章:
)
2024年自动驾驶SLAM面试题及答案(更新中)
自动驾驶中的SLAM(Simultaneous Localization and Mapping,即同步定位与地图构建)是关键技术,它能够让车辆在未知环境中进行自主定位和地图建构。秋招来临之际,相信大家都已经在忙碌的准备当中了,尤其是应届…...
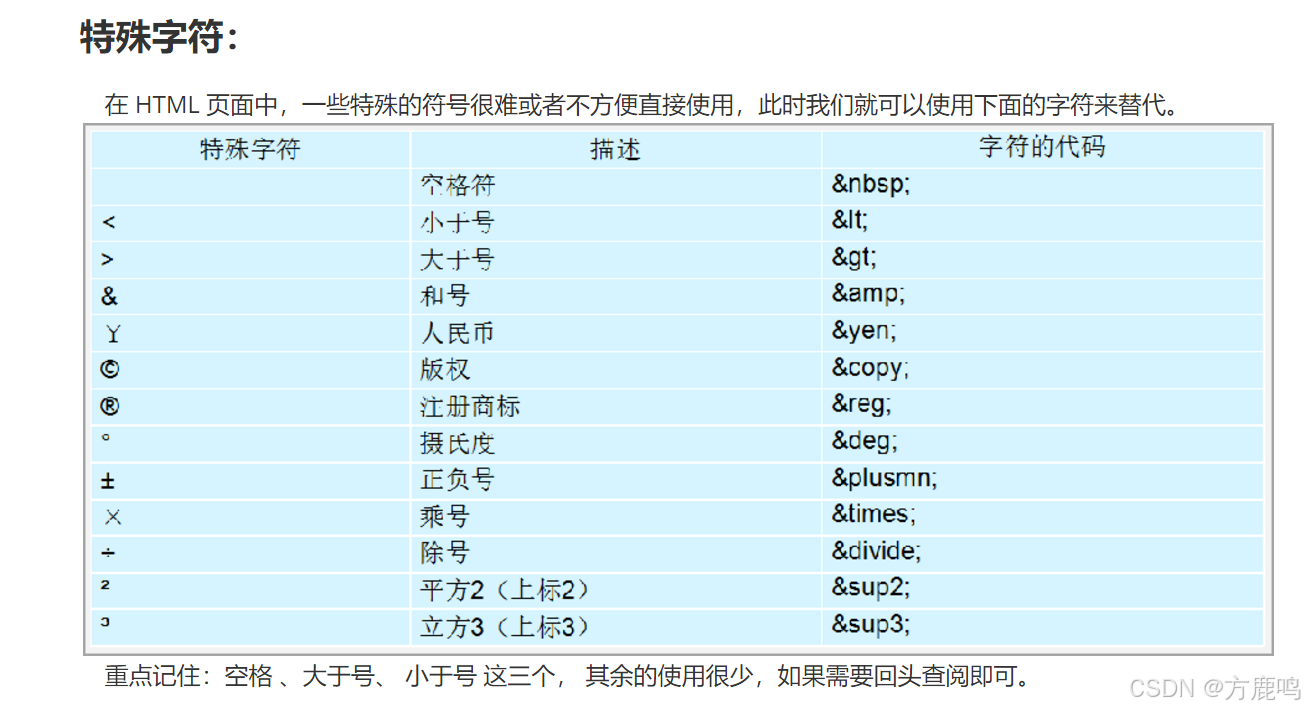
HTML零基础自学笔记(上)-7.18
HTML零基础自学笔记(上) 参考:pink老师一、HTML, Javascript, CSS的关系是什么?二、什么是HTML?1、网页,网站的概念2、THML的基本概念3、THML的骨架标签/基本结构标签 三、HTML标签1、THML标签介绍2、常用标签图像标签ÿ…...

数学建模--图论与最短路径
目录 图论与最短路径问题 最短路径问题定义 常用的最短路径算法 Dijkstra算法 Floyd算法 Bellman-Ford算法 SPFA算法 应用实例 结论 延伸 如何在实际应用中优化Dijkstra算法以提高效率? 数据结构优化: 边的优化: 并行计算&…...

FLINK-checkpoint失败原因及处理方式
在 Flink 或其他分布式数据处理系统中,Checkpoint 失败可能由多种原因引起。以下是一些常见的原因: 资源不足: 如果 TaskManager 的内存或磁盘空间不足,可能无法完成状态的快照,导致 Checkpoint 失败。 网络问题&am…...

Hbase映射为Hive外表
作者:振鹭 Hbase对应Hive外表 (背景:在做数据ETL中,可能原始数据在列式存储Hbase中,这个时候,如果我们想清洗数据,可以考虑把Hbase表映射为Hive的外表,然后使用Hive的HQL来清除处理数据) 1. …...
题解)
洛谷P1002(过河卒)题解
题目传送门 思路 直接爆搜会TLE,所以考虑进行DP。 由于卒只可以从左边和上面走,所以走到(i,j)的路程总数为从上面走的路程总数加上从左边走的路程总数。我们用dp[i][j]表示从起点走到(i,j)的路程总数,那么状态转移方程为: dp[…...

微信小程序 async-validator 表单验证 第三方包
async-validator 是一个基于 JavaScript 的表单验证库,支持异步验证规则和自定义验证规则 主流的 UI 组件库 Ant-design 和 Element 中的表单验证都是基于 async-validator 使用 async-validator 可以方便地 构建表单中逻辑,使得错误提示信息更加友好和灵…...

马克·扎克伯格解释为何开源AI对开发者有利
Meta 今天发布了 Llama 3.1 系列人工智能模型,在人工智能领域取得了重大进展,其性能可与领先的闭源模型相媲美。值得一提的是,在多项人工智能基准测试中,Llama 3.1 405B 模型的性能超过了 OpenAI 的 GPT-4o 和 Claude 3.5 Sonnet。…...

游戏外挂的技术实现与五年脚本开发经验分享
引言: 在数字娱乐的浪潮中,电子游戏成为许多人生活中不可或缺的一部分。然而,随着游戏的普及,一些玩家为了追求更高效的游戏体验或不正当竞争优势,开始使用游戏外挂程序。这些外挂往往通过修改游戏正常运行机制来提供非…...

认识神经网络【多层感知器数学原理】
文章目录 1、什么是神经网络2、人工神经网络3、多层感知器3.1、输入层3.2、隐藏层3.2.1、隐藏层 13.2.2、隐藏层 2 3.3、输出层3.4、前向传播3.4.1、加权和⭐3.4.2、激活函数 3.5、反向传播3.5.1、计算梯度3.5.2、更新权重和偏置 4、小结 🍃作者介绍:双非…...

MySQL入门学习-SQL高级技巧.CTE和递归查询
在 MySQL 中,SQL 高级技巧包括了 Common Table Expressions(CTE)和递归查询等。 一、CTE(Common Table Expressions,公共表表达式)的概念: CTE 是一个临时的结果集,它可以在一个查询…...

键盘是如何使用中断机制的?当打印一串字符到显示屏上时发生了什么???
当在键盘上按下一个键时会进行一下操作: 1.当按下任意一个键时,键盘编码器监控会来判断按下的键是哪个 2.键盘控制器用将解码,将键盘的数据保存到键盘控制器里数据寄存器里面 3.此时发送一个中断请求给中断控制器,中断控制器获取到中断号发送…...

Spring Boot 接口访问频率限制的实现详解
目录 概述为什么需要接口访问频率限制常见的实现方式 基于过滤器的实现基于拦截器的实现基于第三方库Bucket4j的实现 实际代码示例 基于过滤器实现Rate Limiting基于拦截器实现Rate Limiting使用Bucket4j实现Rate Limiting 最佳实践 选择合适的限流算法优化性能记录日志和监控…...

前端页面:用户交互持续时间跟踪(duration)user-interaction-tracker
引言 在用户至上的时代,精准把握用户行为已成为产品优化的关键。本文将详细介绍 user-interaction-tracker 库,它提供了一种高效的解决方案,用于跟踪用户交互的持续时间,并提升项目埋点的效率。通过本文,你将了解到如…...
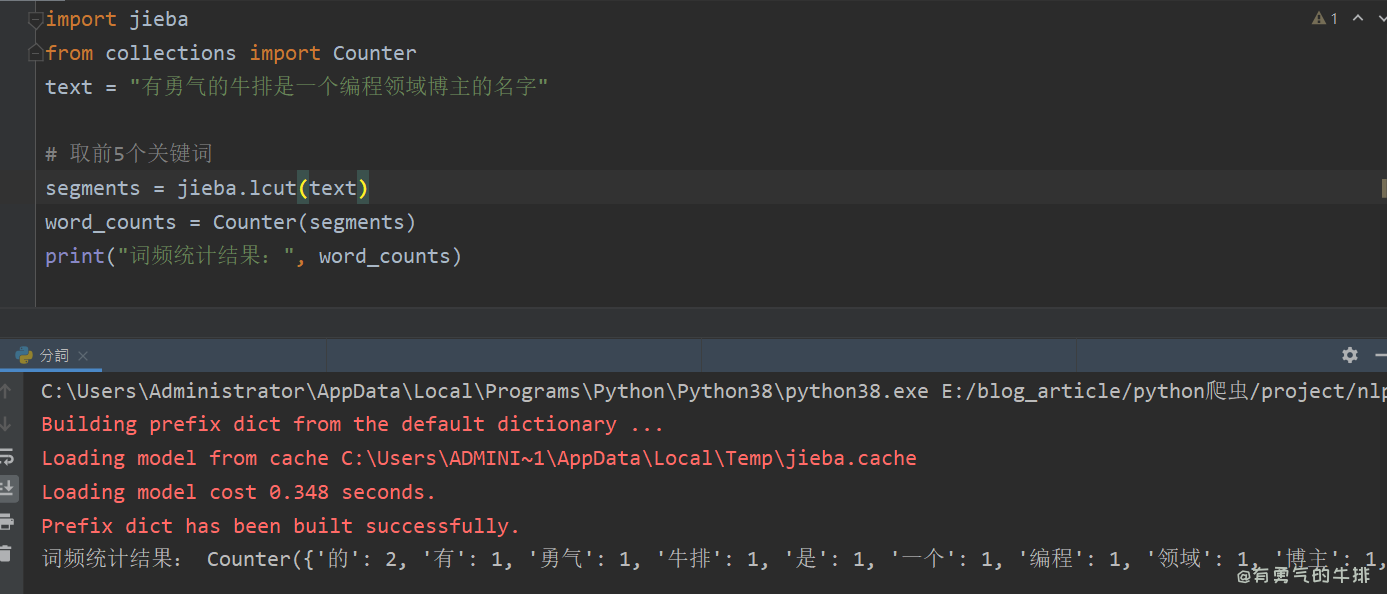
中文分词库 jieba 详细使用方法与案例演示
1 前言 jieba 是一个非常流行的中文分词库,具有高效、准确分词的效果。 它支持3种分词模式: 精确模式全模式搜索引擎模式 jieba0.42.1测试环境:python3.10.9 2 三种模式 2.1 精确模式 适应场景:文本分析。 功能࿱…...

EXO-helper解释
目录 helper解释 helper解释 在Python中,字符串 "\033[93m" 是一个ANSI转义序列,用于在支持ANSI转义码的终端或控制台中改变文本的颜色。具体来说,\033[93m 用于将文本颜色设置为亮黄色(或浅黄色,具体取决于终端的显示设置)。 这里的 \033 实际上是八进制的 …...

Qt开发网络嗅探器01
引言 随着互联网的快速发展和普及,人们对网络性能、安全和管理的需求日益增长。在复杂的网络环境中,了解和监控网络中的数据流量、安全事件和性能问题变得至关重要。为了满足这些需求,网络嗅探器作为一种重要的工具被 广泛应用。网络嗅探器是…...
)
mysql面试(三)
MVCC机制 MVCC(Multi-Version Concurrency Control) 即多版本并发控制,了解mvcc机制,需要了解如下这些概念 事务id 事务每次开启时,都会从数据库获得一个自增长的事务ID,可以从事务ID判断事务的执行先后…...

阿里云公共DNS免费版自9月30日开始限速 企业或商业场景需使用付费版
本周阿里云发布公告对公共 DNS 免费版使用政策进行调整,免费版将从 2024 年 9 月 30 日开始按照请求源 IP 进行并发数限制,单个 IP 的请求数超过 20QPS、UDP/TCP 流量超过 2000bps 将触发限速策略。 阿里云称免费版的并发数限制并非采用固定的阈值&…...

捷配生产笔记-一文搞懂阻焊层基本知识
什么是阻焊层? 阻焊层(也称为阻焊剂)是应用于PCB表面的一层薄薄的聚合物材料。其目的是保护铜电路,防止焊料在焊接过程中流入不需要焊接的区域。除焊盘外,整个电路板都涂有阻焊层。 阻焊层应用于 PCB 的顶部和底部。树…...

别再只会用阿里云加速了!手把手教你配置Docker daemon.json,优化日志与存储路径
深度优化Docker生产环境:daemon.json高阶配置实战指南 当Docker从开发测试环境走向生产部署时,默认配置往往成为性能瓶颈和系统隐患的源头。许多团队在遭遇磁盘爆满、日志失控或网络拥塞后,才意识到基础镜像加速只是Docker调优的冰山一角。本…...
的经典实战与优化技巧)
从八皇后到N皇后:深度优先搜索(DFS)的经典实战与优化技巧
从八皇后到N皇后:深度优先搜索(DFS)的经典实战与优化技巧 在国际象棋的64格棋盘上放置8个互不攻击的皇后,这个看似简单的谜题背后隐藏着组合数学的深邃奥秘。当我们将问题扩展到NN棋盘上的N皇后问题时,它便成为了检验算法效率的绝佳试金石。本…...

HLK-V20语音模块的智能家居实战:如何用STM32控制灯、电机并连接ESP8266上云
HLK-V20语音模块的智能家居实战:STM32联动控制与云端接入全解析 在智能家居DIY领域,语音控制早已从概念走向现实。HLK-V20作为一款高性价比的纯离线语音识别模块,配合STM32的丰富外设控制能力,可以构建出响应迅速、隐私安全的本地…...

告别龟速传输:在AutoDL上利用AutoPanel高效迁移大容量数据集的实战技巧
1. 为什么大容量数据集传输总是慢如蜗牛? 每次在AutoDL上处理大容量数据集时,最让人抓狂的就是漫长的传输等待。我清楚地记得第一次尝试上传15GB图像数据集时的绝望——整整6个小时的等待,期间还因为网络波动失败了两次。后来才发现ÿ…...
)
别再手动发邮件了!用Power Automate为SharePoint列表搭建自动化审批流(保姆级教程)
别再手动发邮件了!用Power Automate为SharePoint列表搭建自动化审批流(保姆级教程) 在快节奏的现代办公环境中,手动处理审批流程已成为效率的隐形杀手。想象一下:员工提交的请假申请需要HR手动转发邮件,采购…...

Discourse Docker持续集成:自动化构建与部署完整指南 [特殊字符]
Discourse Docker持续集成:自动化构建与部署完整指南 🚀 【免费下载链接】discourse_docker A Docker image for Discourse 项目地址: https://gitcode.com/gh_mirrors/dis/discourse_docker Discourse Docker持续集成是现代论坛部署的最佳实践&a…...

生物 --- 免疫力
1、免疫的概念免疫是人体的一种生理功能。识别“自己”和“非己”。破坏和排斥进入人体内的抗原物质,如病原体。指机体识别和清除外来入侵抗原及体内突变或衰老细胞,并维持自身内环境稳定的生理功能。2、免疫系统的构成免疫系统主要由免疫器官、免疫细胞…...
)
从DDR到LPDDR:搞懂手机和电脑内存差异,看这一篇就够了(附选型避坑指南)
从DDR到LPDDR:全面解析移动与桌面内存的技术差异与选型策略 在智能设备性能爆发的时代,内存技术正经历着从"够用"到"极致优化"的转变。当工程师面对物联网终端需要0.5W超低功耗、游戏手机追求100GB/s带宽、自动驾驶系统要求纳秒级延…...
)
NotebookLM多源文档交叉去重实战:基于BERT-Embedding相似度阈值调优(附可复用Python脚本)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM多源文档交叉去重的核心挑战与价值定位 NotebookLM 作为 Google 推出的基于引用的 AI 笔记工具,其核心能力依赖于对用户上传文档的语义理解与跨文档关联。然而当用户导入多个来源…...
)
别让你的AI模型‘偏心’:用Python实战解决机器学习公平性问题(附代码)
别让你的AI模型‘偏心’:用Python实战解决机器学习公平性问题(附代码) 在信贷审批系统中,女性申请者的通过率比男性低23%;在招聘算法中,35岁以上候选人的简历筛选通过率骤降40%——这些真实案例揭示了一个残…...