【北京迅为】《i.MX8MM嵌入式Linux开发指南》-第三篇 嵌入式Linux驱动开发篇-第四十三章 驱动模块传参
i.MX8MM处理器采用了先进的14LPCFinFET工艺,提供更快的速度和更高的电源效率;四核Cortex-A53,单核Cortex-M4,多达五个内核 ,主频高达1.8GHz,2G DDR4内存、8G EMMC存储。千兆工业级以太网、MIPI-DSI、USB HOST、WIFI/BT、4G模块、CAN、RS485等接口一应俱全。H264、VP8视频硬编码,H.264、H.265、VP8、VP9视频硬解码,并提供相关历程,支持8路PDM接口、5路SAI接口、2路Speaker。系统支持Android9.0(支持获取root限)Linux4.14.78+Qt5.10.1、Yocto、Ubuntu20、Debian9系统。适用于智能充电桩,物联网,工业控制,医疗,智能交通等,可用于任何通用工业和物联网应用、
【公众号】迅为电子
【粉丝群】258811263
第四十三章 驱动模块传参
本章导读
在编写应用程序的时候,我们可以给main函数传递参数,比如void main(int argc,char *argv[]),这个功能大家用起来已经很熟练了。其实在使用insmod命令加载模块的时候,也是可以给模块传递参数的。
43.1章节讲解了驱动模块传参的理论知识。
43.2章节编写了驱动模块传普通参数的驱动程序,并运行测试验证。
43.3章节编写了驱动模块传数组的驱动程序,并运行测试。
本章内容对应视频讲解链接(在线观看):
驱动模块传参数 → https://www.bilibili.com/video/BV1Vy4y1B7ta?p=14
程序源码在网盘资料“iTOP-i.MX8MM开发板\02-i.MX8MM开发板网盘资料汇总(不含光盘内容)\嵌入式Linux开发指南(iTOP-i.MX8MM)手册配套资料\2.驱动程序例程\05-驱动模块传参”路径下。
43.1 驱动模块传参简介
什么是驱动传参
在装载内核模块时,用户可以向模块传递参数,形式为“insmode(或modprobe)模块名参数名=参数
值”,如果不传递,参数将使用模块内定义的缺省值。如果模块被内置,就无法insmod了,但是bootloader
可以通过在bootargs里设置“模块名.参数名=值”的形式给该内置的模块传递参数。
驱动传参的作用
- 设置驱动的相关参数,比如设置缓冲区的大小
- 设置安全校验,防止我们写的驱动被人盗用
怎么给驱动传参数
传递普通的参数,比如 char int类型,使用如下函数:
| 函数 | module_param(name,type,perm); |
| 参数name | 要传递进去参数的名称 |
| 参数type | 要传递进去参数的类型 |
| 参数perm | 要传递进去参数的读写权限 |
部分常用参数权限解释如下:
| 宏定义 | 权限解释 |
| #defineS_IRUSR 00400 | 文件所有者可读 |
| #defineS_IWUSR00200 | 文件所有者可写 |
| #defineS_IXUSR 00100 | 文件所有者可执行 |
| #defineS_IRGRP00040 | 与文件所有者同组的用户可读 |
| #defineS_IWGRP00020 | |
| #defineS_IXGRP 00010 | |
| #defineS_IROTH 00004 | 与文件所有者不同组的用户可读 |
| #defineS_IWOTH00002 | |
| #defineS_IROTH 00004 | 与文件所有者不同组的用户可读 |
| #defineS_IWOTH00002 | |
| #defineS_IXOTH 00001 |
其它的可以使用下面的方法来判断:
可以将数字最后三位转化为二进制:xxx xxx xxx,高位往低位依次看,第一位为 1 表示文件所有者可读,第二位为 1 表示文件所有者可写,第三位为 1 表示文件所有者可执行;接下来三位表示文件所有者同组成员的权限;再下来三位为不同组用户权限。
传递数组使用以下函数:
| 函数 | module_param_array(name,type,nump,perm) |
| 参数name | 要传递进去参数的名称 |
| 参数type | 要传递进去参数的类型 |
| 参数nump | 实际传入进去参数的个数 |
| 参数perm | 要传递进去参数的读写权限 |
43.2 驱动模块传普通参数
程序源码在网盘资料“iTOP-i.MX8MM开发板\02-i.MX8MM开发板网盘资料汇总(不含光盘内容)\嵌入式Linux开发指南(iTOP-i.MX8MM)手册配套资料\2.驱动程序例程\05-驱动模块传参\001”路径下。
通过43.1章节驱动理论基础的学习,我们已经把驱动传参的基本概念搞懂了。我们在ubuntu的/home/topeet/imx8mm/001目录下新建parameter.c文件。完整驱动代码如下图所示:
#include <linux/init.h>
#include <linux/module.h>//定义整型变量a
static int a;
//传递普通的参数a,参数权限为S_IRUSR,意为可读
module_param(a,int,S_IRUSR);static int hello_init(void){//打印变量aprintk("a = %d \n",a);printk("hello world! \n");return 0;
}static void hello_exit(void){//打印变量aprintk("a = %d \n",a);printk("goodbye \n");
}module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");以I.MX8MM开发板为例,请参考本手册第三十七章 Linux内核模块。我们将parameter.c文件拷贝到Ubuntu的/home/topeet/imx8mm/05/001目录下。将上次编译helloworld的Makefile文件和build.sh文件拷贝到parameter.c同级目录下,修改Makefile为:
obj-m += parameter.o
KDIR:=/home/topeet/linux/linux-imx
PWD?=$(shell pwd)
all:make -C $(KDIR) M=$(PWD) modules ARCH=arm64
clean:make -C $(KDIR) M=$(PWD) clean编译驱动成功如下图所示:

我们通过nfs将编译好的驱动程序加载模块,我们进入到共享目录,加载驱动模块如图所示:
insmod parameter.ko

我们卸载驱动,然后改变参数的值,再次加载驱动模块,如下图所示:
rmmod parameter
insmod parameter.ko a=5

我们进入到/sys/module/parameter/目录下,查看变量a的读写权限,如下图所示:
cd /sys/module/parameter/
ls
cd parameters/
ls
ls -l

如上图所示,查看到变量a的读写权限为-r,意为可读,驱动程序里面设置的变量a的权限为S_IRUSR,意为可读,所以变量a传参成功。
43.3 驱动模块传数组
程序源码在网盘资料“iTOP-i.MX8MM开发板\02-i.MX8MM开发板网盘资料汇总(不含光盘内容)\嵌入式Linux开发指南(iTOP-i.MX8MM)手册配套资料\2.驱动程序例程\05-驱动模块传参\002”路径下。
通过43.2章节驱动理论基础的学习,我们已经把驱动传普通参数学会了。本小节我们来学习如何在驱动模块传数组。我们在ubuntu的/home/topeet/imx8mm/002目录下新建parameter.c文件。完整驱动代码如下图所示:
#include <linux/init.h>
#include <linux/module.h>//定义数组b
static int b[5];
//定义实际传入进去参数的个数
static int count;//定义整型变量a
static int a;
//传递普通的参数a,参数权限为S_IRUSR,意为可读
module_param(a, int, S_IRUSR);//传递数组的参数
module_param_array(b, int, &count, S_IRUSR);static int hello_init(void)
{int i;//循环遍历数组b的值for (i = 0; i < count; i++){//打印数组b的值printk("b[%d] = %d \n", i, b[i]);}//打印传入参数的个数printk("count= %d \n", count);return 0;
}static void hello_exit(void)
{printk("goodbye \n");
}module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");我们再将驱动传入数组的代码编译成驱动模块,加载驱动模块,如下图所示:
rmmod parameter
insmod parameter.ko b=1,2,3,4,5

同样我们可以进入到/sys/module/parameter/目录下,查看变量b的权限,如下图所示:
cd /sys/module/parameter/
ls
cd parameters/
ls
ls b -l

如果我们多传入进去参数,会发生什么呢?我们试试传入六个数

到此,我们已经学会了在iTOP-i.MX8MM开发板上面给驱动模块传普通参数和数组参数了。
相关文章:
【北京迅为】《i.MX8MM嵌入式Linux开发指南》-第三篇 嵌入式Linux驱动开发篇-第四十三章 驱动模块传参
i.MX8MM处理器采用了先进的14LPCFinFET工艺,提供更快的速度和更高的电源效率;四核Cortex-A53,单核Cortex-M4,多达五个内核 ,主频高达1.8GHz,2G DDR4内存、8G EMMC存储。千兆工业级以太网、MIPI-DSI、USB HOST、WIFI/BT…...

uniapp 小程序 支付逻辑处理
uniapp 小程序 支付逻辑处理 上代码如果你不需要支付宝适配,可以删除掉支付宝的条件判断代码 <button class"subBtn" :disabled"submiting" click"goPay">去支付</button>// 以下代码你需要改的地方// 1. order/app/v1…...

scikit-learn库学习之make_regression函数
scikit-learn库学习之make_regression函数 一、简介 make_regression是scikit-learn库中用于生成回归问题数据集的函数。它主要用于创建合成的回归数据集,以便在算法的开发和测试中使用。 二、语法和参数 sklearn.datasets.make_regression(n_samples100, n_feat…...
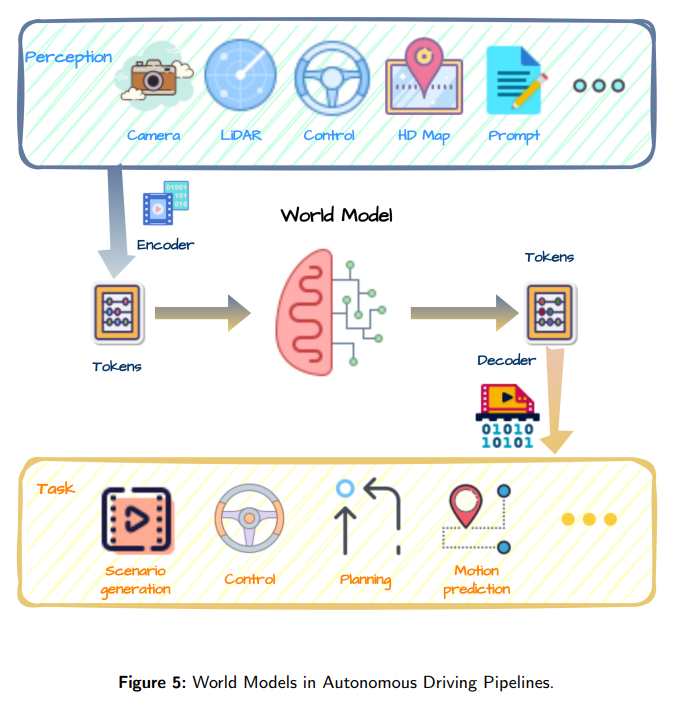
经典文献阅读之--World Models for Autonomous Driving(自动驾驶的世界模型:综述)
Tip: 如果你在进行深度学习、自动驾驶、模型推理、微调或AI绘画出图等任务,并且需要GPU资源,可以考虑使用UCloud云计算旗下的Compshare的GPU算力云平台。他们提供高性价比的4090 GPU,按时收费每卡2.6元,月卡只需要1.7元每小时&…...
)
孙健提到的实验室的研究方向之一是什么?()
孙健提到的实验室的研究方向之一是什么?() 点击查看答案 A.虚拟现实B.环境感知和理解 C.智能体博弈D.所有选项都正确 图灵奖是在哪一年设立的?() A.1962B.1966 C.1976D.1986 孙健代表的实验室的前身主要研究什么?&…...

初级java每日一道面试题-2024年7月23日-Iterator和ListIterator有什么区别?
面试官: Iterator和ListIterator有什么区别? 我回答: Iterator和ListIterator都是Java集合框架中用于遍历集合元素的接口,但它们之间存在一些关键的区别,主要体现在功能和使用场景上。下面我将详细解释这两种迭代器的不同之处: 1. Iterat…...

2024-07-23 Unity AI行为树2 —— 项目介绍
文章目录 1 项目介绍2 AI 代码介绍2.1 BTBaseNode / BTControlNode2.2 动作/条件节点2.3 选择 / 顺序节点 3 怪物实现4 其他功能5 UML 类图 项目借鉴 B 站唐老狮 2023年直播内容。 点击前往唐老狮 B 站主页。 1 项目介绍 本项目使用 Unity 2022.3.32f1c1,实现基…...

Unity-URP-SSAO记录
勾选After Opacity Unity-URP管线,本来又一个“bug”, 网上查不到很多关于ssao的资料 以为会不会又是一个极度少人用的东西 而且几乎都是要第三方替代 也完全没有SSAO大概的消耗是多少,完全是黑盒(因为用的人少,研究的人少,优…...

无人机上磁航技术详解
磁航技术,也被称为地磁导航,是一种利用地球磁场信息来实现导航的技术。在无人机领域,磁航技术主要用于辅助惯性导航系统(INS)进行航向角的测量与校正,提高无人机的飞行稳定性和准确性。其技术原理是&#x…...

使用 cURL 命令测试网站响应时间
文章目录 使用 cURL 命令测试网站响应时间工具介绍cURL 命令详解命令参数说明输出格式说明示例运行结果总结使用 cURL 命令测试网站响应时间 本文将介绍如何使用 cURL 命令行工具来测试一个网站的响应时间。具体来说,我们将使用 cURL 命令来测量并显示各种网络性能指标,包括 …...

「网络通信」HTTP 协议
HTTP 🍉简介🍉抓包工具🍉报文结构🍌请求🍌响应🍌URL🥝URL encode 🍌方法🍌报文字段🥝Host🥝Content-Length & Content-Type🥝User…...

科普文:后端性能优化的实战小结
一、背景与效果 ICBU的核心沟通场景有了10年的“积累”,核心场景的界面响应耗时被拉的越来越长,也让性能优化工作提上了日程,先说结论,经过这一波前后端齐心协力的优化努力,两个核心界面90分位的数据,FCP平…...

LeetCode-day23-3098. 求出所有子序列的能量和
LeetCode-day23-3098. 求出所有子序列的能量和 题目描述示例示例1:示例2:示例3: 思路代码 题目描述 给你一个长度为 n 的整数数组 nums 和一个 正 整数 k 。 一个 子序列的 能量 定义为子序列中 任意 两个元素的差值绝对值的 最小值 。 请…...
CSS3雷达扫描效果
CSS3雷达扫描效果https://www.bootstrapmb.com/item/14840 要创建一个CSS3的雷达扫描效果,我们可以使用CSS的动画(keyframes)和transform属性。以下是一个简单的示例,展示了如何创建一个类似雷达扫描的动画效果: HTM…...

单例模式懒汉模式和饿汉模式
线程安全 单例模式在单线程中,当然是安全的。但是如果在多线程中,由于并行判断,可能会导致创建多个实例。那么如何保证在多线程中单例还是只有一个实例呢? 常见的三种方式: 局部静态变量 原理和饿汉模式相似,利用static只会初始…...

python __repr__和__str__区别
1. __repr__ __repr__ 方法由 repr() 内置函数调用,用于计算对象的“正式”字符串表示形式。理想情况下,这个字符串应该看起来像一个有效的 Python 表达式,可以在适当的环境下用来重新创建具有相同值的对象。如果这不可能实现,那…...

huawei USG6001v1学习----NAT和智能选路
目录 1.NAT的分类 2.智能选路 1.就近选路 2.策略路由 3.智能选路 NAT:(Network Address Translation,网络地址转换) 指网络地址转换,1994年提出的。NAT是用于在本地网络中使用私有地址,在连接互联网时转而使用全局…...

FPGA JTAG最小系统 EP2C5T144C8N
FPGA的文档没有相应的基础还真不容易看懂,下面是B站上对FPGA文档的解读(本文非对文档解读,只是为个人记录第三期:CycloneIV E最小系统板设计(一)从Datasheet上获取FPGA的基本参数_哔哩哔哩_bilibili 电源部份 核心电…...
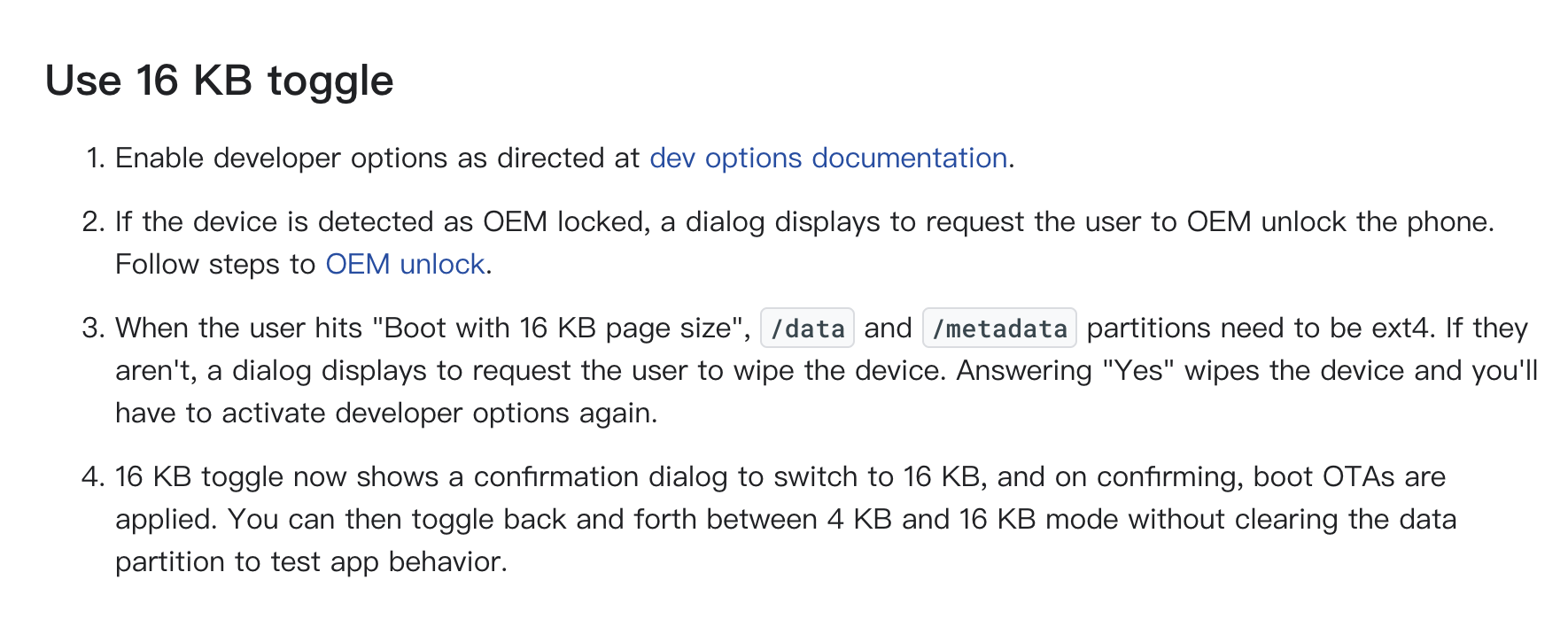
Android 15 之如何快速适配 16K Page Size
在此之前,我们通过 《Android 15 上 16K Page Size 为什么是最坑》 介绍了: 什么是16K Page Size为什么它对于 Android 很坑如何测试 如果你还没了解,建议先去了解下前文,然后本篇主要是提供适配的思路,因为这类适配…...

学习unity官方的网络插件Netcode【一】
对bool值的个人理解: using Unity.Netcode; using UnityEngine; //个人理解:通过Rpc完成了一次客户端给服务端发消息,服务端再向所有客户端广播消息 public class RpcTest : NetworkBehaviour {public override void OnNetworkSpawn(){if (!…...

KMS_VL_ALL_AIO:三步实现Windows和Office永久激活的完整指南
KMS_VL_ALL_AIO:三步实现Windows和Office永久激活的完整指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统频繁弹出的激活提醒而烦恼吗?Office文档突…...

嵌入式老鸟带你搞懂eMMC上电、下电时序:从Pre-Idle到HS400模式切换的完整流程解析
嵌入式系统eMMC深度解析:从硬件时序到Linux驱动的全链路设计 在嵌入式系统开发中,eMMC存储器的稳定性和性能优化往往是决定产品可靠性的关键因素之一。当开发板启动失败或存储性能不达标时,很多工程师会首先怀疑软件问题,却忽略了…...

终极ncmdump使用指南:3步解锁网易云NCM加密音乐,实现跨平台自由播放
终极ncmdump使用指南:3步解锁网易云NCM加密音乐,实现跨平台自由播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾为网易云音乐下载的NCM格式文件无法在其他设备播放而烦恼?ncmdump作为…...

2026届必备的五大AI科研神器实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能技术迅猛发展,论文AI工具在学术研究领域正慢慢变成重要辅助,…...

Verilog数值转换:数字设计工程师必须掌握的底层规则与工程实践
1. 项目概述:为什么Verilog数值转换是数字设计的基石在数字电路设计和FPGA开发中,Verilog是我们描述硬件行为的主要语言。很多刚入行的朋友,包括我当年,都曾以为写Verilog就是写“另一种编程语言”,把C语言或Python的习…...

启扬RK3568核心板如何赋能智能炒菜机:从嵌入式主控到AI烹饪
1. 项目概述:当嵌入式核心板遇上智能炒菜机在餐饮后厨这个看似传统,实则对效率、成本和一致性要求极高的领域,痛点一直非常明确。人工炒菜,老师傅的手艺固然可贵,但出餐速度受限于体力,菜品口味因厨师状态、…...

八大网盘直链解析工具:高效跨平台文件下载全攻略
八大网盘直链解析工具:高效跨平台文件下载全攻略 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

人工智能领域SCI期刊征稿|中科院2区为主,录用率80%+,对国人极度友好,避坑必看,自引率安全、投稿零压力,审稿高效、录用率拉满,毕业 / 评职必看!
对于AI、计算机视觉、神经网络、计算智能领域的科研人(硕博、青年教师、工程师)而言,发表SCI核心需求是「分区稳、录用易、对国人友好、无预警风险」。本文整理4本人工智能领域优质SCI期刊,涵盖中科院2区(4本ÿ…...

终极指南:使用Wand-Enhancer免费解锁WeMod高级功能
终极指南:使用Wand-Enhancer免费解锁WeMod高级功能 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer WeMod作为最受欢迎的游戏修改工具之一&am…...

番茄小说下载器:5种格式+Web界面打造你的私人数字图书馆终极指南
番茄小说下载器:5种格式Web界面打造你的私人数字图书馆终极指南 【免费下载链接】fanqienovel-downloader 下载番茄小说 项目地址: https://gitcode.com/gh_mirrors/fa/fanqienovel-downloader 你是否曾因网络信号不佳而被迫中断精彩的小说阅读?是…...