江苏科技大学24计算机考研数据速览,有专硕复试线大幅下降67分!
江苏科技大学(Jiangsu University of Science and Technology),坐落在江苏省镇江市,是江苏省重点建设高校,江苏省人民政府与中国船舶集团有限公司共建高校,国家国防科技工业局与江苏省人民政府共建高校 ,教育部卓越工程师教育培养计划高校,教育部本科教学工作水平评估优秀学校,江苏省高水平大学建设高峰计划B类建设高校,中国船舶与海洋工程产业知识产权联盟、江苏船舶与海洋类高校协同发展联盟牵头单位。
截至2022年11月,学校拥有镇江长山、梦溪2个校区和张家港校区以及上海办事处,占地3979亩;学校在校普通本科生21900余人,博士、硕士研究生5300余人,本、硕、博学历留学生600余人;有教职工2400余人,其中专任教师1700余人;设有21个学院,79个本科专业;有3个博士后科研流动站,5个一级学科博士学位授权点,25个一级学科硕士学位授权点,14个硕士专业学位授予类别。
2024年最新报考信息
评级
计算机C-、软件工程C-
计算机学院
081104 模式识别与智能系统
081200 计算机科学与技术
083500 软件工程
085400 电子信息
学制、学费、奖学金
学制: 3年
学费
全日制:含学术和专业学位0.8万元;非全日制:1万元
奖学金
1.学校鼓励优秀生源报考我校,设有研究生新生学业奖学金、学年学业奖学金、国家奖学金、专项奖学金等多项研究生奖学金,同时提供研究生国家助学金。
其中,研究生新生学业奖学金特等奖3万,一等奖1.2万,二等奖0.8万;学校还设有研究生海外交流学习奖学金、创新创业奖学金用于资助研究生参加国际学术交流以及创新、创业项目的培育及奖励,具体参照学校相关文件;各类奖学金总和生均不少于0.8万/学年;国家奖学金按照国家下达计划评定,奖励标准为2万元/生/学年。
2.研究生在校学习期间,除按规定享受有关奖助学金外,还可承担助教、助研和助管工作,领取相应的津贴,家庭经济困难者还可申请助学贷款。
3.我校接收校内外推荐免试研究生,凡获本科所在院校推荐免试资格的应届本科生在规定时间内填报我校一般均可被接收录取。凡被我校录取的推免生可获得新生学业奖学金(不低于1.2万),具体参照学校相关文件。
4.非全日制硕士研究生按照学校相关规定可参加学年学业奖学金评定,具体参照学校相关文件。
初试科目
计算机学院
081104 模式识别与智能系统 7【1】
101思想政治理论、201英语一、301数学一、817概率论与数理统计
081200 计算机科学与技术18【2】
101思想政治理论、201英语一、301数学一、845计算机综合【数据结构+计算机组成原理】
083500 软件工程12【2】
101思想政治理论、201英语一、301数学一、818计算机程序设计语言【C++程序设计】
085400 电子信息81【6】全+16非全
101思想政治理论、204英语二、302数学二、818计算机程序设计语言【C++程序设计】
复试科目
综合成绩=初试总成绩70%+复试总成绩30%,其中: 复试总成绩=专业课笔试成绩+口语与听力总成绩+专业综合知识面试成绩+政治成绩
复试采用笔试与面试相结合的形式,内容主要包括: ①一门专业课闭卷笔试,具体科目见招生简章,时间3小时,满分150分。
081104 模式识别与智能系统
916计算机程序设计语言
081200 计算机科学与技术
083500 软件工程
085400 电子信息
914数据库原理
②专业综合面试,包含外语口语、听力及专业综合知识。专业综合面试总分为150分,其中,外语口语加听力满分共50分,专业综合知识面试满分100分。
历年录取分数
2024年:

2023年:

来源:江苏科技大学24计算机考研数据速览,有专硕复试线大幅下降67分!
相关文章:
江苏科技大学24计算机考研数据速览,有专硕复试线大幅下降67分!
江苏科技大学(Jiangsu University of Science and Technology),坐落在江苏省镇江市,是江苏省重点建设高校,江苏省人民政府与中国船舶集团有限公司共建高校,国家国防科技工业局与江苏省人民政府共建高校 &am…...

20分钟上手新版Skywalking 9.x APM监控系统
Skywalking https://skywalking.apache.org/ Skywalking是专为微服务、云原生和基于容器的(Kubernetes)架构设计的分布式系统性能监控工具。 Skywalking关键特性 ● 分布式跟踪 ○ 端到端分布式跟踪。服务拓扑分析、以服务为中心的可观察性和API仪表板。…...

【07】LLaMA-Factory微调大模型——微调模型导出与微调参数分析
上文介绍了如何对微调后的模型进行使用与简单评估。本文将介绍对微调后的模型进行导出的过程。 一、llama-3微调后的模型导出 首先进入虚拟环境,打开LLaMA-Factory的webui页面 conda activate GLM cd LLaMA-Factory llamafactory-cli webui 之后,选择…...
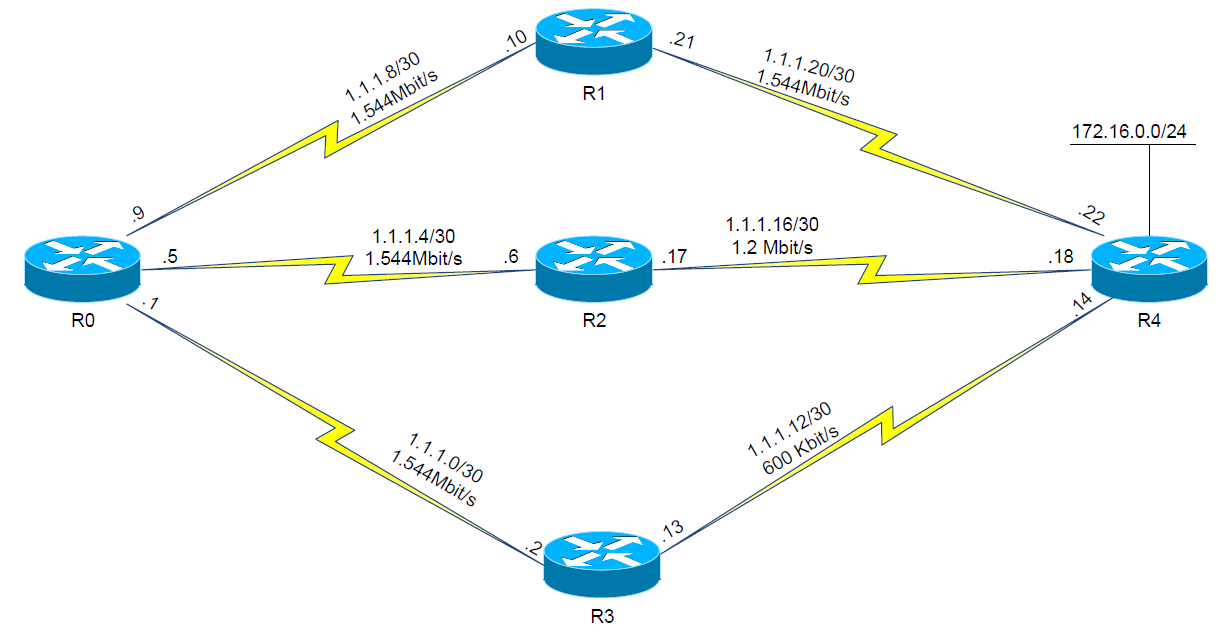
动态路由协议 —— EIGRP 与 OSPF 的区别
EIGRP(增强内部网关路由协议)和 OSPF(开放式最短路径优先)是两种最常见的动态路由协议,主要是用来指定路由器或交换机之间如何通信。将其应用于不同的情况下,可提高速率、延迟等方面的性能。那么它们之间到…...

【中项】系统集成项目管理工程师-第5章 软件工程-5.1软件工程定义与5.2软件需求
前言:系统集成项目管理工程师专业,现分享一些教材知识点。觉得文章还不错的喜欢点赞收藏的同时帮忙点点关注。 软考同样是国家人社部和工信部组织的国家级考试,全称为“全国计算机与软件专业技术资格(水平)考试”&…...

HarmonyOS应用开发者高级认证,Next版本发布后最新题库 - 多选题序号1
基础认证题库请移步:HarmonyOS应用开发者基础认证题库 注:有读者反馈,题库的代码块比较多,打开文章时会卡死。所以笔者将题库拆分,单选题20个为一组,多选题10个为一组,题库目录如下,…...

Windows11(24H2)LTSC长期版下载!提前曝光Build26100?
系统;windows11 文章目录 前言一、LTSC是什么?二、 Windows 11 Vision 24H2 LTSC 的版本号为 Build 26100,镜像中提供以下三个 SKU:总结 前言 好的系统也能给你带来不一样的效果。 一、LTSC是什么? & & L…...

【北京迅为】《i.MX8MM嵌入式Linux开发指南》-第三篇 嵌入式Linux驱动开发篇-第四十三章 驱动模块传参
i.MX8MM处理器采用了先进的14LPCFinFET工艺,提供更快的速度和更高的电源效率;四核Cortex-A53,单核Cortex-M4,多达五个内核 ,主频高达1.8GHz,2G DDR4内存、8G EMMC存储。千兆工业级以太网、MIPI-DSI、USB HOST、WIFI/BT…...

uniapp 小程序 支付逻辑处理
uniapp 小程序 支付逻辑处理 上代码如果你不需要支付宝适配,可以删除掉支付宝的条件判断代码 <button class"subBtn" :disabled"submiting" click"goPay">去支付</button>// 以下代码你需要改的地方// 1. order/app/v1…...

scikit-learn库学习之make_regression函数
scikit-learn库学习之make_regression函数 一、简介 make_regression是scikit-learn库中用于生成回归问题数据集的函数。它主要用于创建合成的回归数据集,以便在算法的开发和测试中使用。 二、语法和参数 sklearn.datasets.make_regression(n_samples100, n_feat…...
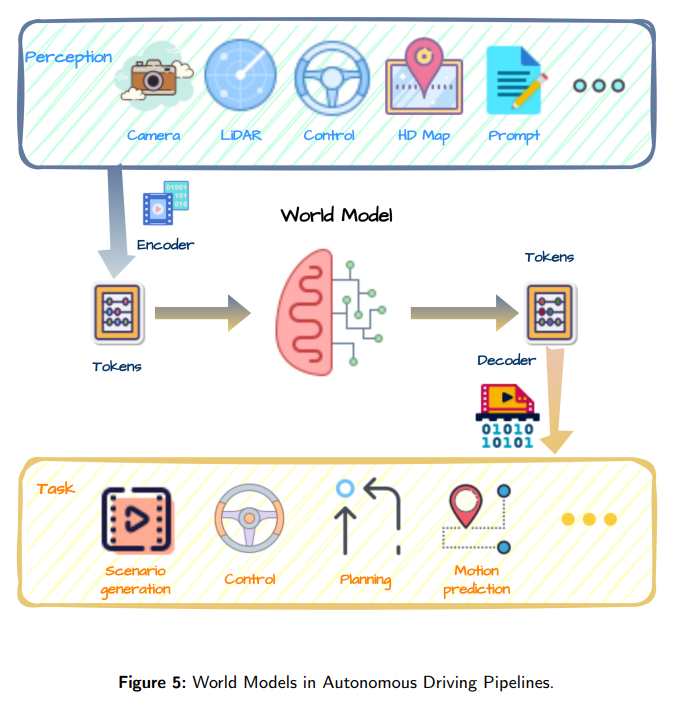
经典文献阅读之--World Models for Autonomous Driving(自动驾驶的世界模型:综述)
Tip: 如果你在进行深度学习、自动驾驶、模型推理、微调或AI绘画出图等任务,并且需要GPU资源,可以考虑使用UCloud云计算旗下的Compshare的GPU算力云平台。他们提供高性价比的4090 GPU,按时收费每卡2.6元,月卡只需要1.7元每小时&…...
)
孙健提到的实验室的研究方向之一是什么?()
孙健提到的实验室的研究方向之一是什么?() 点击查看答案 A.虚拟现实B.环境感知和理解 C.智能体博弈D.所有选项都正确 图灵奖是在哪一年设立的?() A.1962B.1966 C.1976D.1986 孙健代表的实验室的前身主要研究什么?&…...

初级java每日一道面试题-2024年7月23日-Iterator和ListIterator有什么区别?
面试官: Iterator和ListIterator有什么区别? 我回答: Iterator和ListIterator都是Java集合框架中用于遍历集合元素的接口,但它们之间存在一些关键的区别,主要体现在功能和使用场景上。下面我将详细解释这两种迭代器的不同之处: 1. Iterat…...

2024-07-23 Unity AI行为树2 —— 项目介绍
文章目录 1 项目介绍2 AI 代码介绍2.1 BTBaseNode / BTControlNode2.2 动作/条件节点2.3 选择 / 顺序节点 3 怪物实现4 其他功能5 UML 类图 项目借鉴 B 站唐老狮 2023年直播内容。 点击前往唐老狮 B 站主页。 1 项目介绍 本项目使用 Unity 2022.3.32f1c1,实现基…...

Unity-URP-SSAO记录
勾选After Opacity Unity-URP管线,本来又一个“bug”, 网上查不到很多关于ssao的资料 以为会不会又是一个极度少人用的东西 而且几乎都是要第三方替代 也完全没有SSAO大概的消耗是多少,完全是黑盒(因为用的人少,研究的人少,优…...

无人机上磁航技术详解
磁航技术,也被称为地磁导航,是一种利用地球磁场信息来实现导航的技术。在无人机领域,磁航技术主要用于辅助惯性导航系统(INS)进行航向角的测量与校正,提高无人机的飞行稳定性和准确性。其技术原理是&#x…...

使用 cURL 命令测试网站响应时间
文章目录 使用 cURL 命令测试网站响应时间工具介绍cURL 命令详解命令参数说明输出格式说明示例运行结果总结使用 cURL 命令测试网站响应时间 本文将介绍如何使用 cURL 命令行工具来测试一个网站的响应时间。具体来说,我们将使用 cURL 命令来测量并显示各种网络性能指标,包括 …...

「网络通信」HTTP 协议
HTTP 🍉简介🍉抓包工具🍉报文结构🍌请求🍌响应🍌URL🥝URL encode 🍌方法🍌报文字段🥝Host🥝Content-Length & Content-Type🥝User…...

科普文:后端性能优化的实战小结
一、背景与效果 ICBU的核心沟通场景有了10年的“积累”,核心场景的界面响应耗时被拉的越来越长,也让性能优化工作提上了日程,先说结论,经过这一波前后端齐心协力的优化努力,两个核心界面90分位的数据,FCP平…...

LeetCode-day23-3098. 求出所有子序列的能量和
LeetCode-day23-3098. 求出所有子序列的能量和 题目描述示例示例1:示例2:示例3: 思路代码 题目描述 给你一个长度为 n 的整数数组 nums 和一个 正 整数 k 。 一个 子序列的 能量 定义为子序列中 任意 两个元素的差值绝对值的 最小值 。 请…...
)
NotebookLM新闻传播研究落地全图谱(2024最新实证报告)
更多请点击: https://kaifayun.com 第一章:NotebookLM新闻传播研究的范式演进与学科定位 NotebookLM 作为 Google 推出的面向研究者的 AI 助手,其核心设计理念——以用户上传文档为知识锚点、通过引用溯源生成可信响应——正悄然重构新闻传播…...

FanControl传感器无法检测?终极修复指南让风扇控制重回正轨
FanControl传感器无法检测?终极修复指南让风扇控制重回正轨 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trendi…...

基于DS18B20与WipperSnapper的无代码物联网温度监测方案
1. 项目概述:当经典传感器遇上无代码物联网 在物联网和智能硬件的世界里,温度监测是一个永恒的基础需求。无论是想监控家里的温室环境、记录鱼缸水温,还是追踪服务器机柜的热量变化,你都需要一个可靠、精确且易于集成的温度传感器…...

CircuitPython微控制器图形保存实战:从屏幕截图到BMP文件生成
1. 项目概述:为什么我们需要在微控制器上保存图形? 在嵌入式开发领域,尤其是当我们使用像Adafruit PyPortal、PyGamer这类带有彩色显示屏的开发板时,图形界面的调试和内容存档一直是个不大不小的痛点。想象一下,你花了…...

FPGA实战:用Z80与8051软核构建可运行BASIC的复古计算机
1. 项目概述:在FPGA上复活经典8位计算机如果你和我一样,对上世纪七八十年代那些经典的8位计算机架构——比如Zilog Z80和Intel 8051——抱有浓厚的兴趣,同时又对现代FPGA技术着迷,那么这个项目绝对会让你兴奋。它不是一个简单的仿…...

面试题详解:智能客服 Agent 系统全栈拆解——Rasa Pro、对话管理、意图识别、GraphRAG、Qwen 与 RAG 优化实战
1. 先把整个问题想清楚:智能客服系统到底在解决什么?1.1 它不是一个“会聊天的机器人”,而是一套能理解、决策、执行、反馈的系统很多人一提客服系统,就把重点全部放在大模型会不会回答上。但企业里真正的客服系统,从来…...
)
别只装AlexNet了!手把手教你在MATLAB里玩转更多预训练模型(VGG, ResNet, MobileNet安装指南)
别只装AlexNet了!手把手教你在MATLAB里玩转更多预训练模型(VGG, ResNet, MobileNet安装指南) 当你第一次在MATLAB中调用alexnet函数时,那种"开箱即用"的体验确实令人惊艳。但就像一位米其林大厨不会只满足于使用基础厨具…...

深度学习立体匹配:从MC-CNN架构解析到工程实践优化
1. 项目概述:从传统到深度,立体匹配的范式革新在计算机视觉领域,立体匹配是一个经典且核心的问题,它的目标是从一对经过校正的左右图像中,为每个像素找到其在另一幅图像中的对应点,从而计算出场景的深度信息…...

01_C语言学习路线与开发环境搭建
C语言学习路线与开发环境搭建 一、本篇文章要解决什么问题 你可能是第一次接触编程,或者从其他语言转过来想学 C 语言。不管哪种情况,摆在面前的第一个问题都是:从哪开始? 这篇文章就帮你解决三个最实际的问题: C 语言…...

从零搭建到日常调试:一份给新手的 Kafka 命令行操作全流程指南
从零搭建到日常调试:一份给新手的 Kafka 命令行操作全流程指南 第一次接触 Kafka 时,我被它那些晦涩的概念和复杂的命令行参数搞得晕头转向。作为一个从 MySQL 和 Redis 这类传统数据库转过来的开发者,Kafka 的分布式消息队列模型确实需要一些…...