基于STM32 + FPGA 的软体机器人的 CAN总线运动控制器的设计
相关文章:
基于STM32 + FPGA 的软体机器人的 CAN总线运动控制器的设计
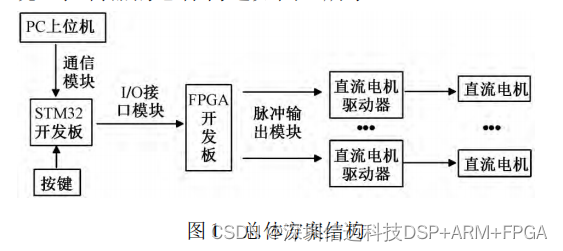
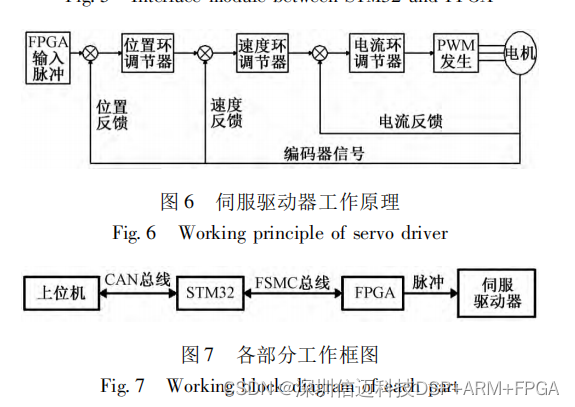
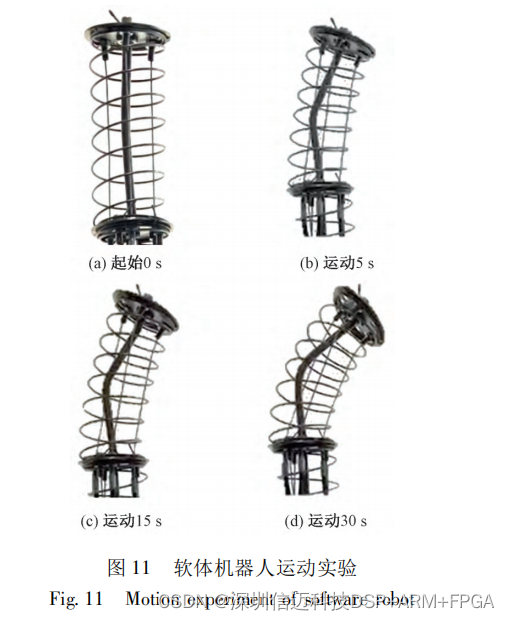
针对在软体机器人控制时,多电机协同控制过程中难度大、通用性差、协同性差等缺点,设计了基于 ARM和 FPGA的软体机器人的控制器局域网络 ( controller area network,CAN) 总线运动控制器,采用 ARMCortex-M4 …...
ROC曲线和AUC值
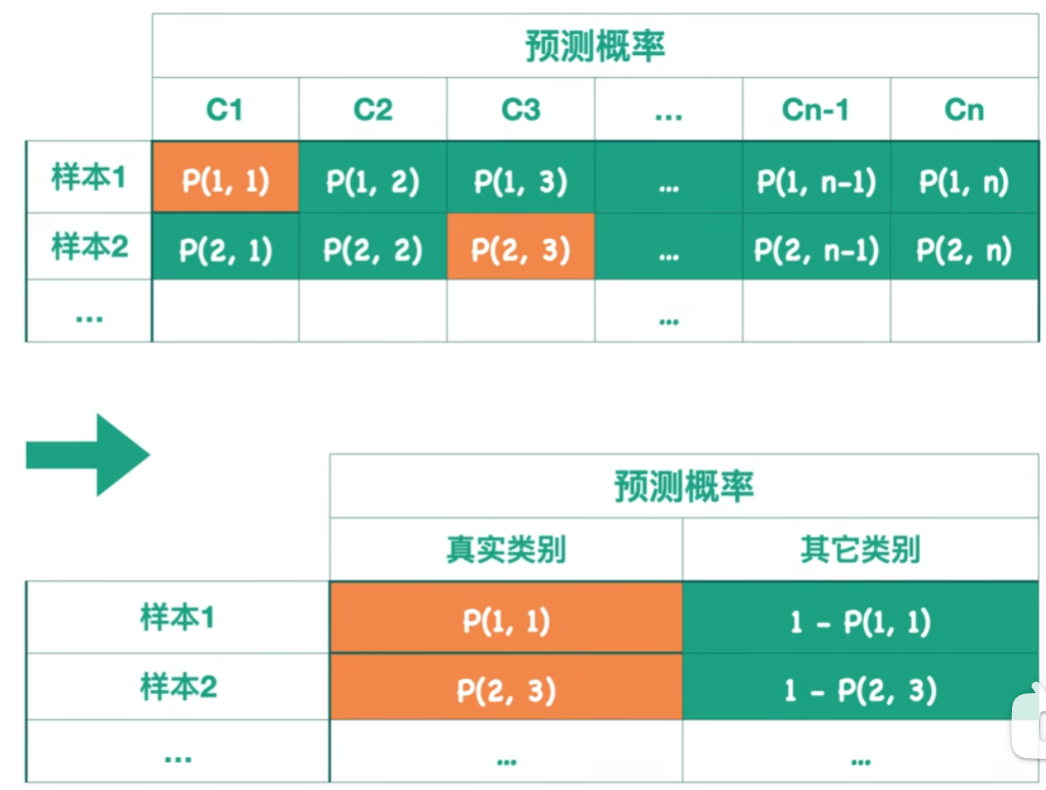
ROC曲线(Receiver Operating Characteristic,受试者工作特征)评价分类模型的可视化工具,是一条横纵坐标都限制在0-1范围内的曲线横坐标是假正率FPR,错误地判断为正例的概率纵坐标是真正率TPR,正确地判断为正…...

【vue.js】在网页中实现一个金属抛光质感的按钮
文章目录前言效果电脑效果手机效果说明完整代码index.html前言 诶?这有一个按钮(~ ̄▽ ̄)~,这是一个在html中实现的具有金属质感并且能镜面反射的按钮~ 效果 电脑效果 手机效果 说明 主要思路是使用 navig…...
android实现评论区功能
效果 activity_detail.xml <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas.android.com/apk/res/android"xmlns:app"http://schemas.android.com/apk/res-auto"xmlns:tools"http…...

Java每日一练(20230319)
目录 1. 最大矩形 🌟🌟🌟 2. 回文对 🌟🌟🌟 3. 给表达式添加运算符 🌟🌟🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练…...
Redis缓存双写一致性
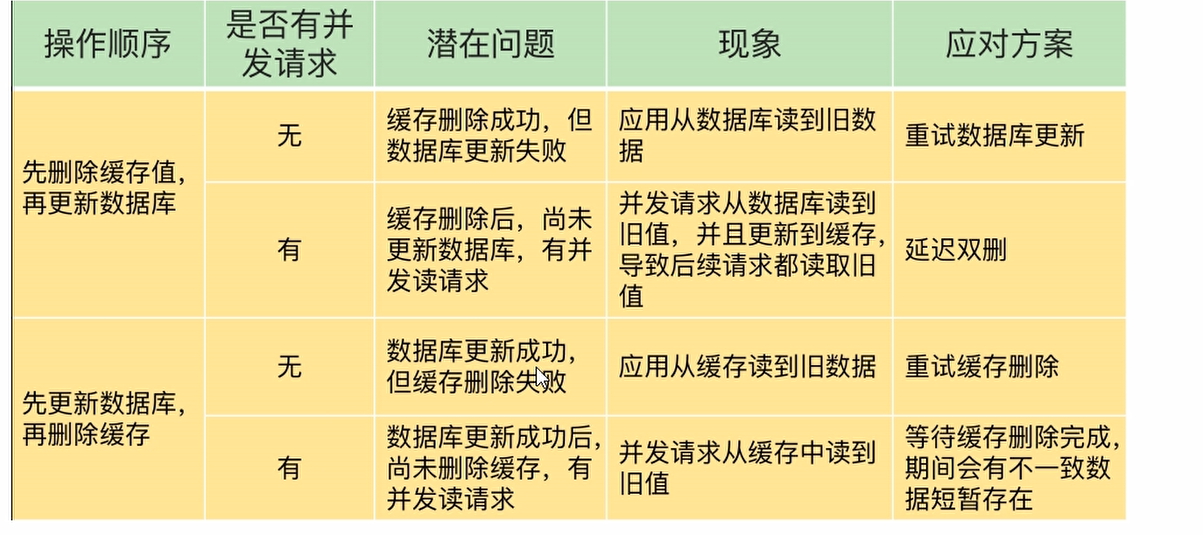
目录双写一致性Redis与Mysql双写一致性canal配置流程代码案例双写一致性理解缓存操作细分缓存一致性多种更新策略挂牌报错,凌晨升级先更新数据库,在更新缓存先删除缓存,在更新数据库先更新数据库,在删除缓存延迟双删策略总结双写一致性 Redis与Mysql双写一致性 canal 主要是…...

【2023-Pytorch-检测教程】手把手教你使用YOLOV5做交通标志检测
项目下载地址:YOLOV5交通标志识别检测数据集代码模型教学视频-深度学习文档类资源-CSDN文库 交通标志的目标检测算法在计算机视觉领域一直属于热点研究问题,改进的优化算法不断地被提出。国内外许多学者针对现有的目标检测方法中网络结构、目标定位、损…...
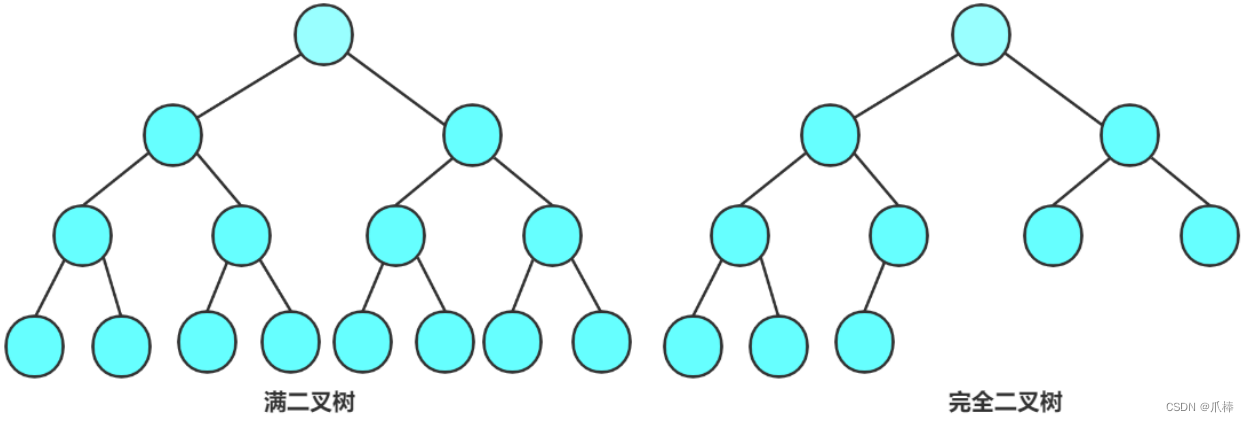
Java中的二叉树
文章目录前言一、树形结构(了解)1.1 概念1.2 概念(重要)1.3 树的表示形式(了解)1.4 树的应用二、二叉树(重点)2.1 概念2.2 两种特殊的二叉树2.3 二叉树的性质2.5 二叉树的存储2.5 二…...
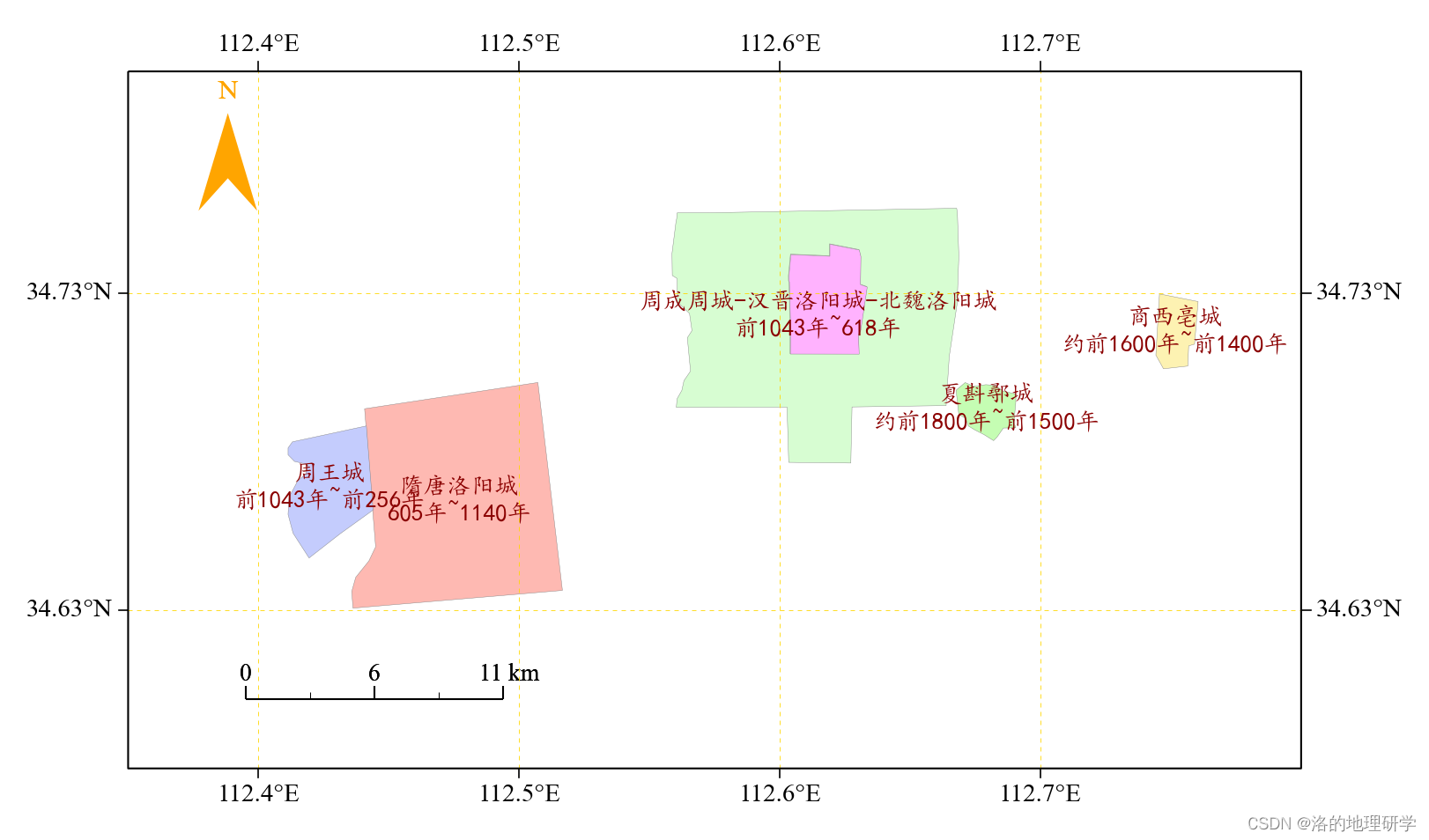
基于 gma 绘制古代洛阳 5 大都城遗址空间分布地图
了解 gma gma 是什么? gma 是一个基于 Python 的地理、气象数据快速处理和数据分析函数包(Geographic and Meteorological Analysis,gma)。gma 网站:地理与气象分析库。 gma 的主要功能有哪些? 气候气象&a…...
分析 Spring 的依赖注入模式
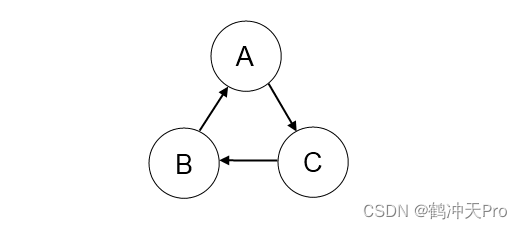
一、依赖注入二、Field Injection优点缺点三、Constructor Injection优点1. 容易发现 code smell优点2. 容易厘清依赖关系优点3. 容易写单元测试优点4. Immutable Object缺点:循环依赖四、总结一、依赖注入 依赖注入 (Dependency Injection,…...
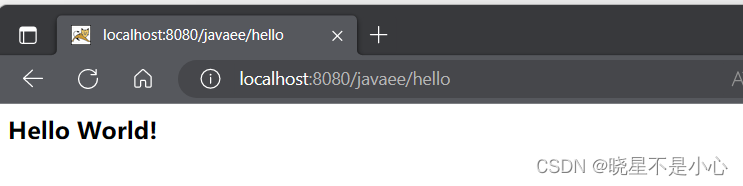
IntelliJ IDEA创建Servlet
目录 ——————————————————————————————— 一、创建Java项目 1、创建java项目 2、选择java 3、next 4、给项目命名 5、新创建完java项目的目录结构 二、变java为servlet项目 1、变servlet项目 2、选择Web Application 3、更新完成后的目录…...

Spring Boot如何让自己的bean优先加载
背景介绍 在一些需求中,可能存在某些场景,比如先加载自己的bean,然后自己的bean做一些DB操作,初始化配置问题,然后后面的bean基于这个配置文件,继续做其他的业务逻辑。因此有了本文的这个题目。 实现方法…...
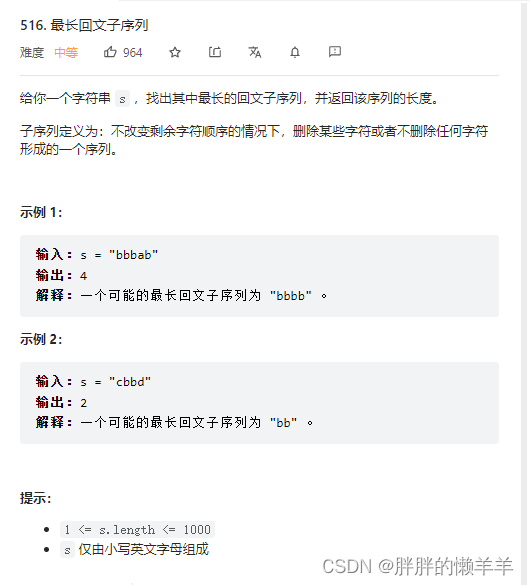
LeetCode分类刷题----动态规划
动态规划509.斐波那契数列70.爬楼梯746.使用最小花费怕楼梯62.不同路径63.不同路径||343.整数拆分96.不同的二叉搜索树01背包问题416.分割等和子集1049.最后一块石头的重量||494.目标和474.一和零完全背包问题518.零钱兑换||377.组合总和IV322.零钱兑换279.完全平方数139.单词拆…...

今年好像没有金三银四了?
大家好,我是记得诚。 金三银四,是换工作的高峰期,新的一年结束了,在年前拿完年终奖,在年后3月和4月换个满意的工作。 单从我公司来看,目前还没有一个人离职,往年离职率是要高一些的。 还有我…...
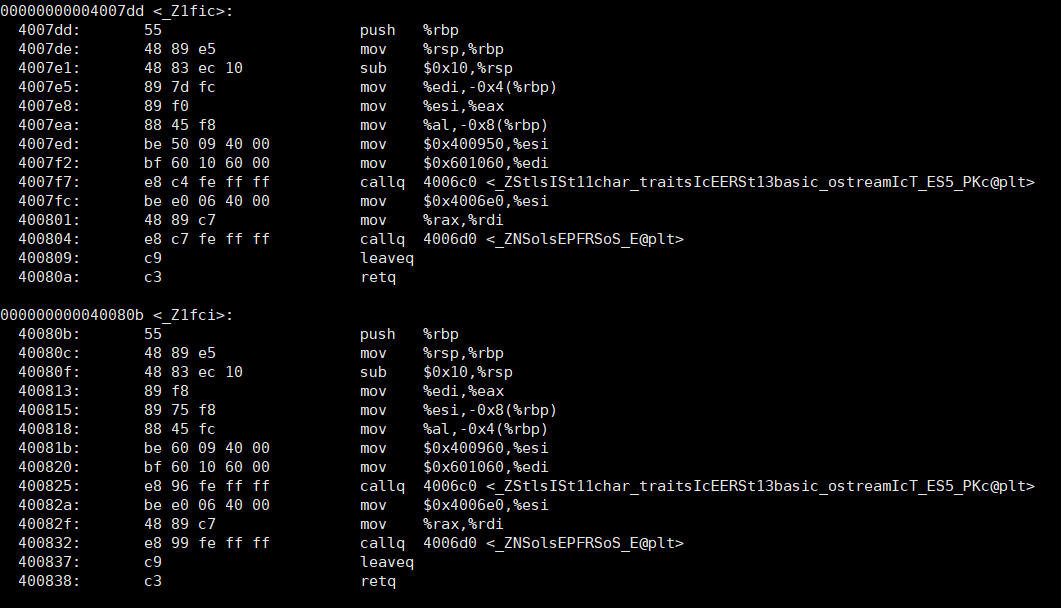
【C++】入门知识之 函数重载
前言提到重载这个词,我们会想到什么呢?重载有一种一词多义的意思,中华文化博大精深,之前有一个笑话,中国的乒乓球谁都打不过,男足谁都打不过,哈哈哈这也是非常有意思的,但是今天我们…...

文心一言发布,你怎么看?chatGPT
百度全新一代知识增强大语言模型“文心一言”于2021年3月16日正式发布,作为一款自然语言处理技术,它引起了广泛的关注和讨论。 首先,文心一言是一款具有重大意义的自然语言处理技术。在人工智能领域,自然语言处理技术一直是一个难…...

字符函数和字符串函数【上篇】
文章目录🎖️1.函数介绍📬1.1. strlen📬1.2. strcpy📬1.3. strcat📬1.4. strcmp📬1.5. strncpy📬1.6. strncat📬1.7. strncmp🎖️1.函数介绍 📬1.1. strlen …...
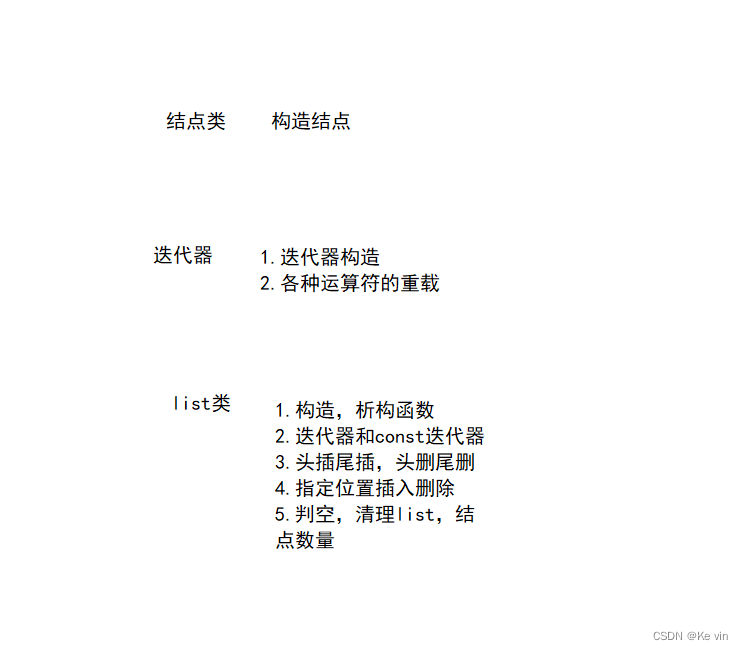
list的模拟实现(模仿STL)
目录 一、模拟实现前的准备 1.list结构认识 2.迭代器的实现不同 3.如何实现需要的功能 二.结点类实现 三.迭代器实现 1.实现前的问题 2._list_iterator类的成员变量和构造函数 3.*和->运算符重载 4.前置和后置的实现 5.前置--和后置-- 6.和!运算符重载 四.list类的实现 1.li…...

05-STM32F1 - 串行通信SPI
SPI STM-SPI作为主机,从机 SPI的时钟,最高为Pclk/2,SPI1最高为36Mhz,SPI2最高为18Mhz。 SPI的四种模式 CPOL CPHA,数据帧8~16位,LSB,MSB 全双工,双向单线,单线 物理层 接口标准…...

【Pytorch】Tensor的分块、变形、排序、极值与in-place操作
本文参加新星计划人工智能(Pytorch)赛道:https://bbs.csdn.net/topics/613989052 这是目录Tensor的分块Tensor的变形Tensor的排序Tensor的极值Tensor的in-place操作Tensor是PyTorch中用于存储和处理多维数据的基本数据结构,它类似于NumPy中的ndarray&…...

深入理解Java AQS:抽象队列同步器的核心原理与实战指南
深入理解Java AQS:抽象队列同步器的核心原理与实战指南 【免费下载链接】JavaGuide Java 面试 & 后端通用面试指南,覆盖计算机基础、数据库、分布式、高并发、系统设计与 AI 应用开发 项目地址: https://gitcode.com/gh_mirrors/ja/JavaGuide …...

FRCRN开源模型多场景落地:客服录音净化、有声书制作、教学音频增强
FRCRN开源模型多场景落地:客服录音净化、有声书制作、教学音频增强 你有没有遇到过这样的烦恼?听一段重要的会议录音,背景里总有嗡嗡的空调声;想剪辑一段播客,却发现环境噪音怎么也去不干净;或者给孩子听网…...

ai赋能centos7开发,用快马平台智能生成优化配置和部署流水线
最近在折腾CentOS7的开发环境配置,发现手动搭建Python/Java环境、调试服务编排特别耗时。后来尝试用InsCode(快马)平台的AI辅助功能,效率直接翻倍。分享下我的实践过程: 环境配置方案生成 输入"CentOS7 Python3.9Java11开发环境"后…...

可视化AI工作流:将UNIT-00接入ComfyUI实现复杂任务编排
可视化AI工作流:将UNIT-00接入ComfyUI实现复杂任务编排 你有没有遇到过这样的场景?想用AI画一张图,但绞尽脑汁也想不出一个足够详细、能激发模型灵感的描述词(Prompt)。或者,你有一张复杂的图表࿰…...

AI头像生成器开发者必备:GitHub项目管理核心技巧详解
AI头像生成器开发者必备:GitHub项目管理核心技巧详解 1. 引言:为什么GitHub对AI头像生成器项目至关重要 开发一个AI头像生成器项目时,你是否遇到过这些挑战:团队成员同时修改同一文件导致冲突、新功能上线后出现意外bug却无法快速…...

Qwen3.5-9B镜像免配置实战:Docker化迁移与端口映射最佳实践
Qwen3.5-9B镜像免配置实战:Docker化迁移与端口映射最佳实践 1. 项目概述 Qwen3.5-9B是一个拥有90亿参数的开源大语言模型,具备强大的逻辑推理、代码生成和多轮对话能力。该模型支持多模态理解(图文输入)和长上下文处理ÿ…...

Hotkey Detective:Windows热键冲突终极诊断指南
Hotkey Detective:Windows热键冲突终极诊断指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经遇到…...

Graphormer在放射性药物中的应用:螯合剂分子稳定常数与配位能力预测
Graphormer在放射性药物中的应用:螯合剂分子稳定常数与配位能力预测 1. 项目概述 Graphormer是一种基于纯Transformer架构的图神经网络模型,专门为分子图(原子-键结构)的全局结构建模与属性预测而设计。该模型在OGB、PCQM4M等分子基准测试中表现优异&a…...

Krita AI Diffusion IP-Adapter功能异常深度排查与解决方案
Krita AI Diffusion IP-Adapter功能异常深度排查与解决方案 【免费下载链接】krita-ai-diffusion Streamlined interface for generating images with AI in Krita. Inpaint and outpaint with optional text prompt, no tweaking required. 项目地址: https://gitcode.com/g…...

Java 26 FFM API进阶:零JNI调用TensorRT/OpenVINO,AI端到端延迟砍半
文章目录一、JNI,AI时代的"文言文写作"二、FFM API:Java调用原生代码的"现代白话文"1. Arena:比try-with-resources还狠的内存管理2. Linker:C函数的"Java身份证"3. jextract:头文件自动…...