Linux驱动开发——串口设备驱动
Linux驱动开发——串口设备驱动
一、串口简介
串口全称叫做串行接口,通常也叫做 COM 接口,串行接口指的是数据一个一个的顺序传输,通信线路简单。使用两条线即可实现双向通信,一条用于发送,一条用于接收。串口通信距离远,但是速度相对会低,串口是一种很常用的工业接口。
I.MX6U 自带的 UART 外设就是串口的一种,UART 全称是 Universal Asynchronous Receiver/Trasmitter,也就是异步串行收发器。UART 作为串口的一种,其工作原理也是将数据一位一位的进行传输,发送和接收各用一条线,因此通过 UART 接口与外界相连最少只需要三条线:TXD(发送)、RXD(接收)和 GND(地线)
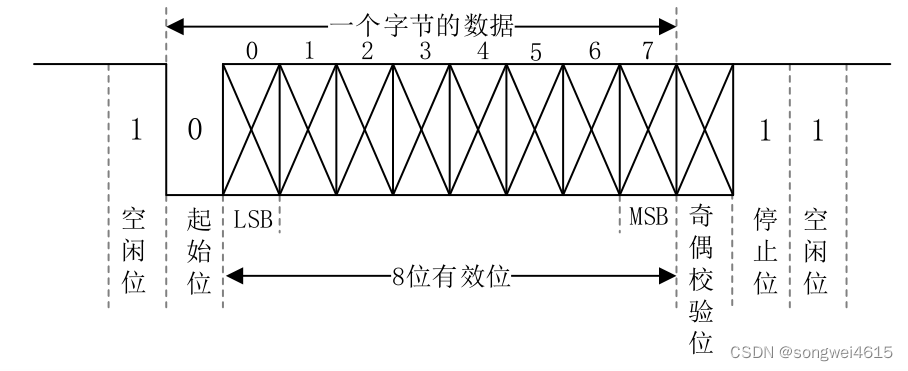
- 空闲位:数据线在空闲状态的时候为逻辑“1”状态,也就是高电平,表示没有数据线空闲,没有数据传输。
- 起始位:当要传输数据的时候先传输一个逻辑“0”,也就是将数据线拉低,表示开始数据传输。
- 数据位:数据位就是实际要传输的数据,数据位数可选择 5~8 位,我们一般都是按照字节传输数据的,一个字节 8 位,因此数据位通常是 8 位的。低位在前,先传输,高位最后传输。
- 奇偶校验位:这是对数据中“1”的位数进行奇偶校验用的,可以不使用奇偶校验功能。
- 停止位:数据传输完成标志位,停止位的位数可以选择 1 位、1.5 位或 2 位高电平,一般都选择 1 位停止位。
- 波特率:波特率就是 UART 数据传输的速率,也就是每秒传输的数据位数,一般选择 9600、19200、115200 等。
二、Linux下串口驱动框架
Linux 提供了串口驱动框架,我们只需要按照相应的串口框架编写驱动程序即可。串口驱动没有什么主机端和设备端之分,就只有一个串口驱动,而且这个驱动也已经由 NXP 官方已经编写好了,我们真正要做的就是在设备树中添加所要使用的串口节点信息。当系统启动以后串口驱动和设备匹配成功,相应的串口就会被驱动起来,生成/dev/ttymxcX(X=0….n)文件。
uart_driver 结构体
uart_driver 结构体表示 UART 驱动,uart_driver 定义在 include/linux/serial_core.h 文件中
struct uart_driver
{struct module *owner; /* 模块所属者 */const char *driver_name; /* 驱动名字 */const char *dev_name; /* 设备名字 */int major; /* 主设备号 */int minor; /* 次设备号 */int nr; /* 设备数 */struct console *cons; /* 控制台 *//** these are private; the low level driver should not* touch these; they should be initialised to NULL*/struct uart_state *state;struct tty_driver *tty_driver;
};
- 加载驱动的时候通过 uart_register_driver 函数向系统注册这个 uart_driver,此函数原型如下:
int uart_register_driver(struct uart_driver *drv)
函数参数和返回值含义如下:
- drv :要注册的 uart_driver。
- 返回值:0,成功;负值,失败。
- 注销驱动的时候也需要注销掉前面注册的 uart_driver,需要用到 uart_unregister_driver 函数,函数原型如下:
void uart_unregister_driver(struct uart_driver *drv)
函数参数和返回值含义如下:
- drv :要注销的 uart_driver。
- 返回值:无。
uart_port 的添加与移除
uart_port 表示一个具体的 port,uart_port 定义在 include/linux/serial_core.h 文件
117 struct uart_port {
118 spinlock_t lock; /* port lock */
119 unsigned long iobase; /* in/out[bwl] */
120 unsigned char __iomem *membase; /* read/write[bwl] */
......
235 const struct uart_ops *ops;
236 unsigned int custom_divisor;
237 unsigned int line; /* port index */
238 unsigned int minor;
239 resource_size_t mapbase; /* for ioremap */
240 resource_size_t mapsize;
241 struct device *dev; /* parent device */
......
250 };
uart_port 中最主要的就是第 235 行的 ops,ops 包含了串口的具体驱动函数,UART 驱动编写人员需要实现 uart_ops,因为 uart_ops 是最底层的 UART 驱动接口,是实实在在的和 UART 寄存器打交道的。
- 那么 uart_port 是怎么和 uart_driver 结合起来,用到 uart_add_one_port 函数函数原型如下:
int uart_add_one_port(struct uart_driver *drv,struct uart_port *uport)
函数参数和返回值含义如下:
- drv:此 port 对应的 uart_driver。
- uport :要添加到 uart_driver 中的 port。
- 返回值:0,成功;负值,失败。
- 卸载 UART 驱动的时候也需要将 uart_port 从相应的 uart_driver 中移除,需要用到uart_remove_one_port 函数,函数原型如下:
int uart_remove_one_port(struct uart_driver *drv, struct uart_port *uport)
函数参数和返回值含义如下:
- drv:要卸载的 port 所对应的 uart_driver。
- uport :要卸载的 uart_port。
- 返回值:0,成功;负值,失败。
三、Linux下串口驱动工作流程
- UART 本质上是一个 platform 驱动
- platform 驱动框架结构体 serial_imx_driver
- 在驱动入口函数中调用uart_register_driver 函数向 Linux 内核注册 uart_driver
- 在驱动出口函数中调用uart_unregister_driver 函数注销掉前面注册的 uart_driver
- UART 设备和驱动匹配成功以后 serial_imx_probe 函数就会执行,此函数的重点工作就是初始化 uart_port,然后将其添加到对应的 uart_driver 中
- 在初始化uart_port过程中,设置 uart_ops 为 imx_pops。imx_pops 就是 I.MX6ULL 最底层的驱动函数集合。
四、Linux下串口应用开发
串口的应用编程就是通过 ioctl()对串口进行配置,调用 read()读取串口的数据、调用 write()向串口写入数据。
Linux 为上层用户做了一层封装,将这些 ioctl()操作封装成了一套标准的 API,这些 API 其实是 C 库函数。
- 这一套接口并不是针对串口开发的,而是针对所有的终端设备,串口是一种终端设备,计算机系统本地连接的鼠标、键盘也是终端设备,通过 ssh 远程登录连接的伪终端也是终端设备
- 使用 termios API,需要在我们的应用程序中包含 termios.h 头文件
终端工作模式
- 规范模式
- 基于行进行处理的。在用户输入一个行结束符(回车符、EOF 等)之前,系统调用 read()函数是读不到用户输入的任何字符的
- 非规范模式
- 所有的输入是即时有效的,不需要用户另外输入行结束符,而且不可进行行编辑
- 原始模式
- 是一种特殊的非规范模式。在原始模式下,所有的输入数据以字节为单位被处理。在这个模式下,终端是不可回显的,并且禁用终端输入和输出字符的所有特殊处理。调用 cfmakeraw()函数将终端设置为原始模式
多线程例程
#define _GNU_SOURCE //在源文件开头定义_GNU_SOURCE宏
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <errno.h>
#include <string.h>
#include <signal.h>
#include <termios.h>
#include <pthread.h>typedef struct uart_hardware_cfg {unsigned int baudrate; /* 波特率 */unsigned char dbit; /* 数据位 */char parity; /* 奇偶校验 */unsigned char sbit; /* 停止位 */
} uart_cfg_t;static struct termios old_cfg; //用于保存终端的配置参数
static int fd; //串口终端对应的文件描述符/**** 串口初始化操作** 参数device表示串口终端的设备节点**/
static int uart_init(const char *device)
{/* 打开串口终端 */fd = open(device, O_RDWR | O_NOCTTY);if (0 > fd) {fprintf(stderr, "open error: %s: %s\n", device, strerror(errno));return -1;}/* 获取串口当前的配置参数 */if (0 > tcgetattr(fd, &old_cfg)) {fprintf(stderr, "tcgetattr error: %s\n", strerror(errno));close(fd);return -1;}return 0;
}/**** 串口配置** 参数cfg指向一个uart_cfg_t结构体对象**/
static int uart_cfg(const uart_cfg_t *cfg)
{struct termios new_cfg = {0}; //将new_cfg对象清零speed_t speed;/* 设置为原始模式 */cfmakeraw(&new_cfg);/* 使能接收 */new_cfg.c_cflag |= CREAD;/* 设置波特率 */switch (cfg->baudrate) {case 1200: speed = B1200;break;case 1800: speed = B1800;break;case 2400: speed = B2400;break;case 4800: speed = B4800;break;case 9600: speed = B9600;break;case 19200: speed = B19200;break;case 38400: speed = B38400;break;case 57600: speed = B57600;break;case 115200: speed = B115200;break;case 230400: speed = B230400;break;case 460800: speed = B460800;break;case 500000: speed = B500000;break;default: //默认配置为115200speed = B115200;printf("default baud rate: 115200\n");break;}if (0 > cfsetspeed(&new_cfg, speed)) {fprintf(stderr, "cfsetspeed error: %s\n", strerror(errno));return -1;}/* 设置数据位大小 */new_cfg.c_cflag &= ~CSIZE; //将数据位相关的比特位清零switch (cfg->dbit) {case 5:new_cfg.c_cflag |= CS5;break;case 6:new_cfg.c_cflag |= CS6;break;case 7:new_cfg.c_cflag |= CS7;break;case 8:new_cfg.c_cflag |= CS8;break;default: //默认数据位大小为8new_cfg.c_cflag |= CS8;printf("default data bit size: 8\n");break;}/* 设置奇偶校验 */switch (cfg->parity) {case 'N': //无校验new_cfg.c_cflag &= ~PARENB;new_cfg.c_iflag &= ~INPCK;break;case 'O': //奇校验new_cfg.c_cflag |= (PARODD | PARENB);new_cfg.c_iflag |= INPCK;break;case 'E': //偶校验new_cfg.c_cflag |= PARENB;new_cfg.c_cflag &= ~PARODD; /* 清除PARODD标志,配置为偶校验 */new_cfg.c_iflag |= INPCK;break;default: //默认配置为无校验new_cfg.c_cflag &= ~PARENB;new_cfg.c_iflag &= ~INPCK;printf("default parity: N\n");break;}/* 设置停止位 */switch (cfg->sbit) {case 1: //1个停止位new_cfg.c_cflag &= ~CSTOPB;break;case 2: //2个停止位new_cfg.c_cflag |= CSTOPB;break;default: //默认配置为1个停止位new_cfg.c_cflag &= ~CSTOPB;printf("default stop bit size: 1\n");break;}/* 将MIN和TIME设置为0 */new_cfg.c_cc[VTIME] = 0;new_cfg.c_cc[VMIN] = 0;/* 清空缓冲区 */if (0 > tcflush(fd, TCIOFLUSH)) {fprintf(stderr, "tcflush error: %s\n", strerror(errno));return -1;}/* 写入配置、使配置生效 */if (0 > tcsetattr(fd, TCSANOW, &new_cfg)) {fprintf(stderr, "tcsetattr error: %s\n", strerror(errno));return -1;}/* 配置OK 退出 */return 0;
}/***
--dev=/dev/ttymxc2
--brate=115200
--dbit=8
--parity=N
--sbit=1
--type=read
***/
/**** 打印帮助信息**/
static void show_help(const char *app)
{printf("Usage: %s [选项]\n""\n必选选项:\n"" --dev=DEVICE 指定串口终端设备名称, 譬如--dev=/dev/ttymxc2\n""\n可选选项:\n"" --brate=SPEED 指定串口波特率, 譬如--brate=115200\n"" --dbit=SIZE 指定串口数据位个数, 譬如--dbit=8(可取值为: 5/6/7/8)\n"" --parity=PARITY 指定串口奇偶校验方式, 譬如--parity=N(N表示无校验、O表示奇校验、E表示偶校验)\n"" --sbit=SIZE 指定串口停止位个数, 譬如--sbit=1(可取值为: 1/2)\n"" --help 查看本程序使用帮助信息\n\n", app);
}/**** 信号处理函数,当串口有数据可读时,会跳转到该函数执行**/
static void io_handler(int sig, siginfo_t *info, void *context)
{unsigned char buf[10] = {0};int ret;int n;if(SIGRTMIN != sig)return;/* 判断串口是否有数据可读 */if (POLL_IN == info->si_code) {ret = read(fd, buf, 8); //一次最多读8个字节数据printf("[ ");for (n = 0; n < ret; n++)printf("0x%hhx ", buf[n]);printf("]\n");}
}/**** 异步I/O初始化函数**/
static void async_io_init(void)
{struct sigaction sigatn;int flag;/* 使能异步I/O */flag = fcntl(fd, F_GETFL); //使能串口的异步I/O功能flag |= O_ASYNC;fcntl(fd, F_SETFL, flag);/* 设置异步I/O的所有者 */fcntl(fd, F_SETOWN, getpid());/* 指定实时信号SIGRTMIN作为异步I/O通知信号 */fcntl(fd, F_SETSIG, SIGRTMIN);/* 为实时信号SIGRTMIN注册信号处理函数 */sigatn.sa_sigaction = io_handler; //当串口有数据可读时,会跳转到io_handler函数sigatn.sa_flags = SA_SIGINFO;sigemptyset(&sigatn.sa_mask);sigaction(SIGRTMIN, &sigatn, NULL);
}static void *read_thread(void *arg)
{printf("read_thread , process id=%d , thread id= %lu\n",getpid(),pthread_self());async_io_init(); //我们使用异步I/O方式读取串口的数据,调用该函数去初始化串口的异步I/Owhile(1) sleep(1); //进入休眠、等待有数据可读,有数据可读之后就会跳转到io_handler()函数return (void *)0;
}
static void *write_thread(void *arg)
{unsigned char w_buf[8] = {0};printf("write_thread , process id=%d , thread id= %lu\n",getpid(),pthread_self());while(1){scanf("%s",w_buf);write(fd, w_buf, 8); //一次向串口写入8个字节memset(w_buf, 0, sizeof w_buf);}return (void *)0;
}int main(int argc, char *argv[])
{uart_cfg_t cfg = {0};char *device = NULL;int rw_flag = -1;int n;/* 解析出参数 */for (n = 1; n < argc; n++) {if (!strncmp("--dev=", argv[n], 6))device = &argv[n][6];else if (!strncmp("--brate=", argv[n], 8))cfg.baudrate = atoi(&argv[n][8]);else if (!strncmp("--dbit=", argv[n], 7))cfg.dbit = atoi(&argv[n][7]);else if (!strncmp("--parity=", argv[n], 9))cfg.parity = argv[n][9];else if (!strncmp("--sbit=", argv[n], 7))cfg.sbit = atoi(&argv[n][7]);else if (!strcmp("--help", argv[n])) {show_help(argv[0]); //打印帮助信息exit(EXIT_SUCCESS);}}/* 串口初始化 */if (uart_init(device))exit(EXIT_FAILURE);/* 串口配置 */if (uart_cfg(&cfg)) {tcsetattr(fd, TCSANOW, &old_cfg); //恢复到之前的配置close(fd);exit(EXIT_FAILURE);}pthread_t tid1,tid2;int ret = pthread_create(&tid1,NULL,read_thread,NULL);if(ret != 0){fprintf(stderr,"error:%s\n",strerror(ret));exit(-1);}ret = pthread_create(&tid2,NULL,write_thread,NULL);if(ret != 0){fprintf(stderr,"error:%s\n",strerror(ret));exit(-1);}while(1);/* 退出 */tcsetattr(fd, TCSANOW, &old_cfg); //恢复到之前的配置close(fd);exit(EXIT_SUCCESS);
}相关文章:
Linux驱动开发——串口设备驱动
Linux驱动开发——串口设备驱动 一、串口简介 串口全称叫做串行接口,通常也叫做 COM 接口,串行接口指的是数据一个一个的顺序传输,通信线路简单。使用两条线即可实现双向通信,一条用于发送,一条用于接收。串口通信距…...

LeetCode--缺失的第一个正数(41)和 接雨水(42)
目录 缺失的第一个正数 接雨水 0ms,100% 代码 缺失的第一个正数 来源:力扣(LeetCode) 链接:https://leetcode.cn/problems/first-missing-positive 题目:给你一个未排序的整数数组 nums ,请…...

java源码阅读---ReentrantLock源码解析
ReentrantLock源码解读 在讲ReentrantLock之前我们先看一下Lock接口里的方法 Lock接口中的方法 lock()方法 void lock(); //直接加锁,如果加锁失败什么也不返回lockInterruptibly()方法 void lockInterruptibly() throws InterruptedException;lockInterruptibly()方法能够…...

OpenCv + Qt5.12.2 文字识别
OpenCv Qt5.12.2 文字检测与文本识别 前言 好久没有进行一些相关的更新的了,去年一共更新了四篇,最近一直在做音视频相关的直播服务,又是重新学习积攒经验的一个过程。去年疫情也比较严重,等到解封,又一直很忙&a…...

网络作业1【计算机网络】
网络作业1【计算机网络】前言推荐网络作业1一. 单选题(共7题,58.1分)二. 多选题(共1题,8.3分)三. 判断题(共4题,33.6分)最后前言 2023-3-13 20:11:42 以下内容源自《计…...

常见背包问题
一.前言若你想学习或正在学习动态规划,背包问题一定是你需要了解的一种题型,并且大多数人最初都是从背包问题入坑进而打开动态规划这一大门。背包问题分为多种,你可以先掌握最常见的主要是三类:01背包、完全背包、多重背包二.分析…...

【python】python编译器以及安装
✅作者简介:一名在读大二学生,希望大家多多支持 🔥系列专栏:python 💬个人主页:小园园子的CSDN博客 python编译器以及安装一、编译器与解释器详细内容Python解释器种类Python的运行机制二、python环境搭建p…...

Effective C++快速复习
Effective C快速复习 习惯 C 01 视 C 为一个语言联邦:C、Object-Oriented C、Template C、STL 02 尽量以 const, enum, inline 替换 #define:其实是尽量以编译器替换预处理器比较好,因为 #define 只是简单的字符串匹配替换,编译…...

【华为OD机试真题JAVA】绘图机器的绘图问题
标题:绘图机器的绘图问题| 时间限制:1秒 | 内存限制:262144K | 语言限制:不限 绘图机器的绘图笔初始位置在原点(0,0) 机器启动后按照以下规则来进行绘制直线 1. 尝试沿着横线坐标正向绘制直线 直到给定的终点E 2. 期间可以通过指令在纵坐标轴方向进行偏移 off…...

GPT-4最震撼我的一点
昨天我看了一遍OpenAI发的视频和论文,最震撼我的并不是根据手绘草图生成HTML页面代码,因为草图太简单,对于复杂的有交互的界面,还不知道它的能力究竟如何,能不能生成准确的、清晰的代码,我再实验一下再给大…...
LeetCode-复制带随机指针的链表
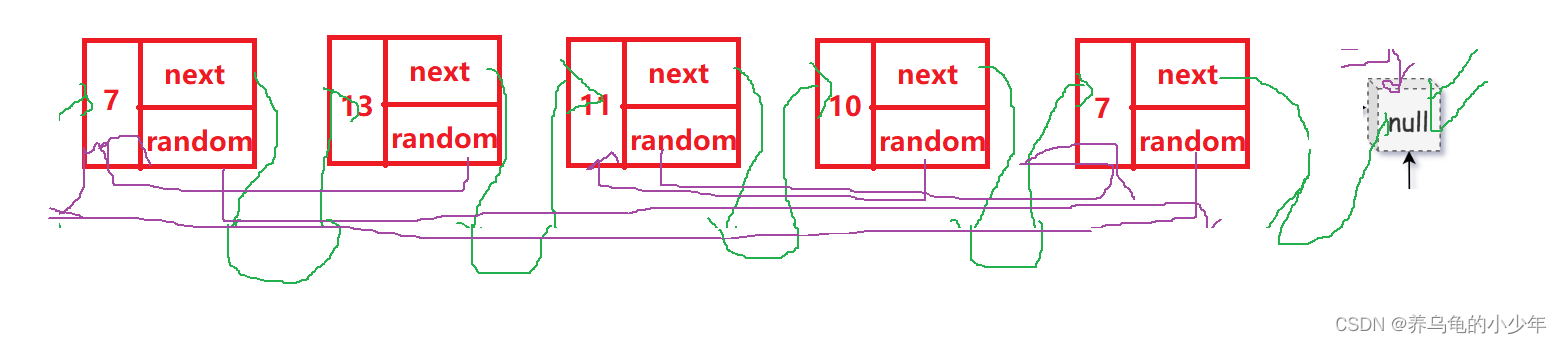
题目描述: 给你一个长度为 n 的链表,每个节点包含一个额外增加的随机指针 random ,该指针可以指向链表中的任何节点或空节点。 构造这个链表的 深拷贝。 深拷贝应该正好由 n 个 全新 节点组成,其中每个新节点的值都设为其对应的…...
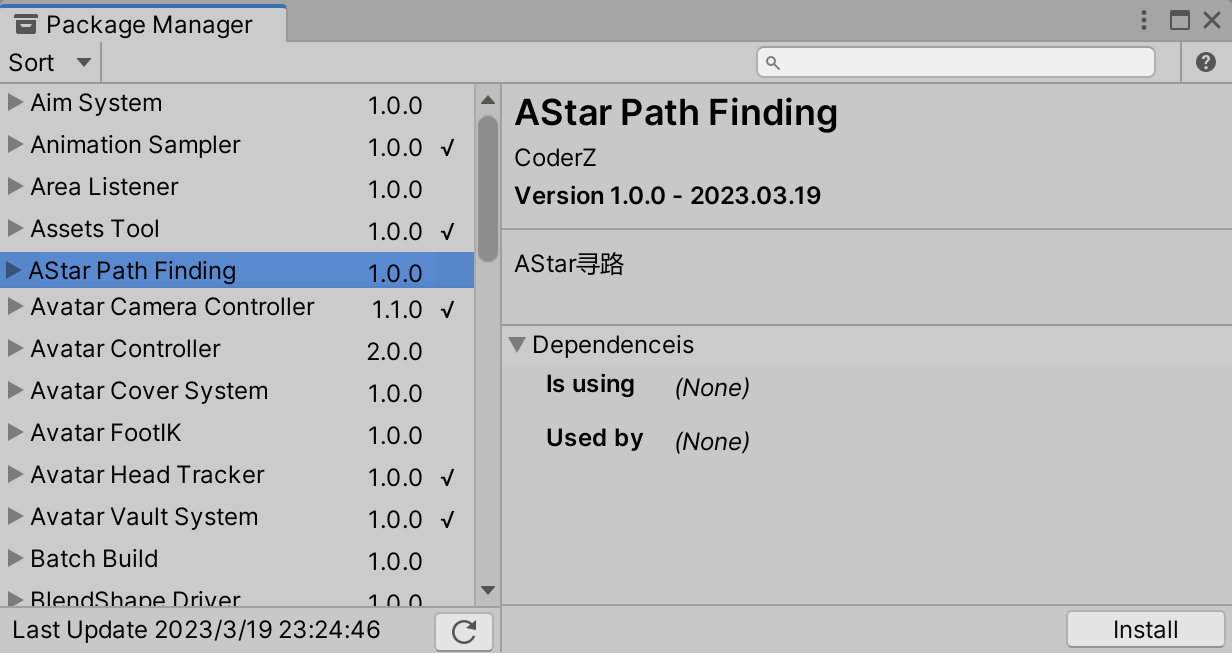
如何在Unity中实现AStar寻路算法及地图编辑器
文章目录AStar算法简介实现Node节点节点间的估价算法核心邻节点的搜索方式地图编辑器简介实现绘制地图网格障碍/可行走区域地图数据存储AStar算法 简介 Unity中提供了NavMesh导航寻路的AI功能,如果项目不涉及服务端它应该能满足大部分需求,但如果涉及服…...

线性代数之矩阵
一、思维导图二、矩阵及其运算1、矩阵的定义注:零矩阵:元素均为0 的矩阵,通常记作0m*n称为矩阵的类型。满足阶梯形矩阵 行简化的阶梯形矩阵即满足如下条件的矩阵: (1)阶梯形; (2)非零首元所在列其余元素均为0 ; (3) 非…...
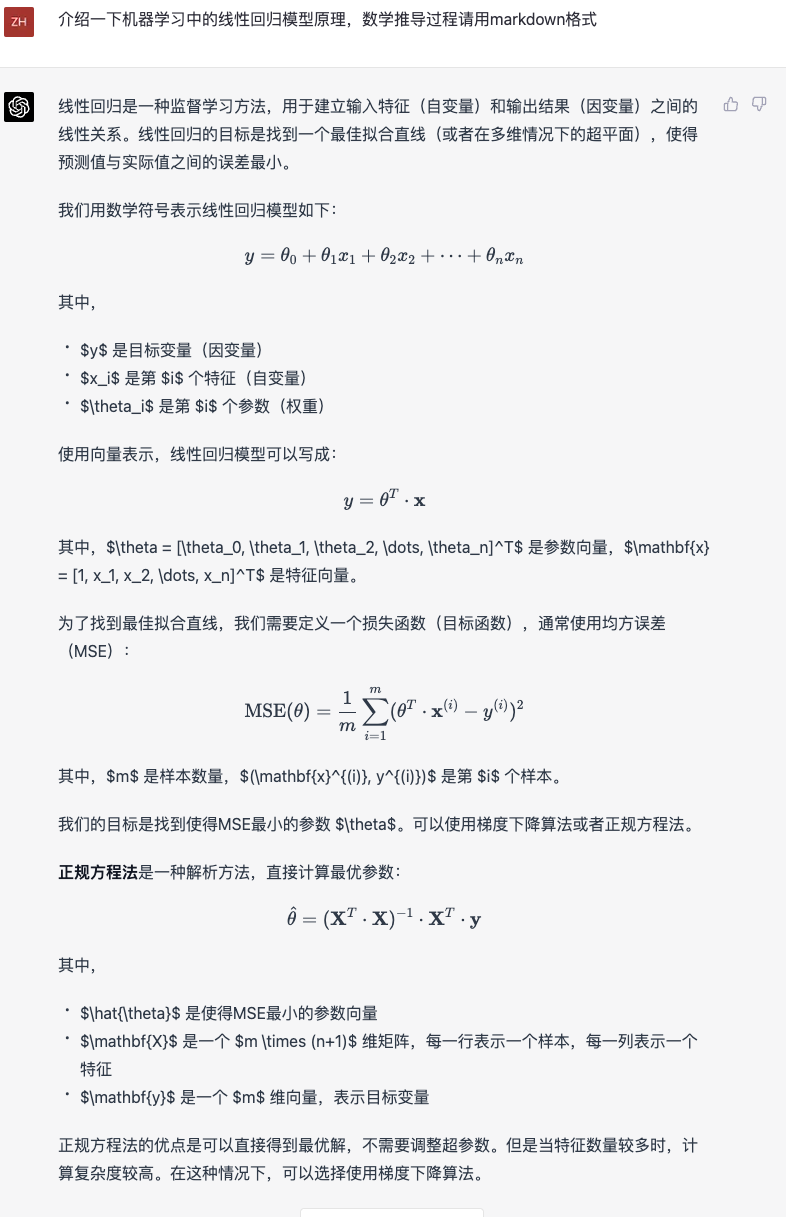
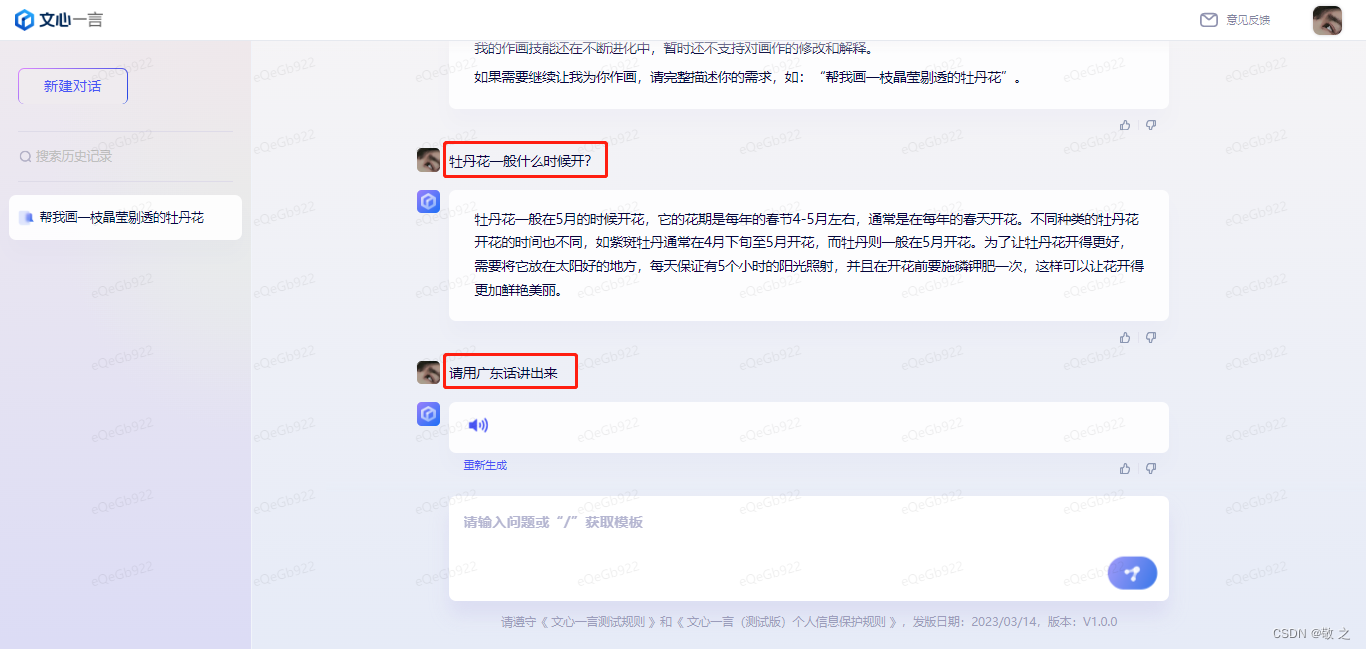
【个人首测】百度文心一言 VS ChatGPT GPT-4
昨天我写了一篇文章GPT-4牛是牛,但这几天先别急,文中我测试了用GPT-4回答ChatGPT 3.5 和 Notion AI的问题,大家期待的图片输入也没有出现。 昨天下午百度发布了文心一言,对标ChatGPT,录屏无实机演示让百度股价暴跌。但是晚上百度就…...
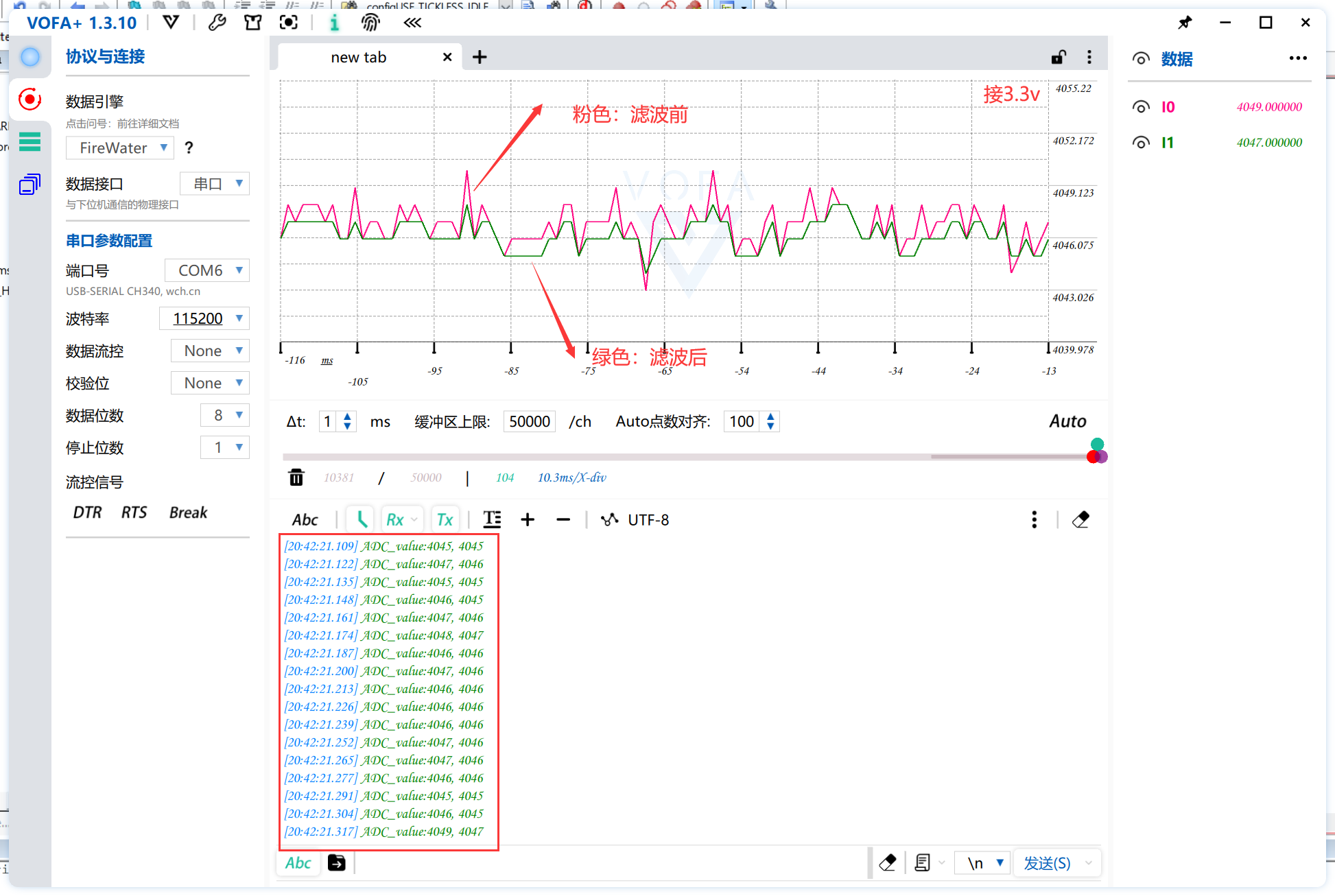
基于STM32的ADC采样及各式滤波实现(HAL库,含VOFA+教程)
前言:本文为手把手教学ADC采样及各式滤波算法的教程,本教程的MCU采用STM32F103ZET6。以HAL库的ADC采样函数为基础进行教学,通过各式常见滤波的实验结果进行分析对比,搭配VOFA工具直观的展示滤波效果。ADC与滤波算法都是嵌入式较为…...
Redis高级篇
文章目录面试题库redis有哪些用法?redis单线程时代性能依然很快的原因?主线程和IO线程怎么协作完成请求处理的BigKey(重要)什么算是BigKey?怎么发现BigKey?怎么删除bigkey?bigkey生产调优缓存双…...
这句话一般是干什么的,在代码中可以不加么?)
sess.close()这句话一般是干什么的,在代码中可以不加么?
sess.close()这句话是用于关闭TensorFlow会话对象的方法。 关闭会话对象可以释放资源,避免内存泄漏,以及清除图中的变量和操作。 在代码中是否可以不加这句话,取决于你是如何创建和使用会话对象的。如果你使用了with语句来创建和管理会话对…...

网络舆情监测处置平台,TOOM舆情如何做好舆情风险点及防控措施?
网络舆情监测处置平台是一个综合性的系统,旨在帮助企业、政府或其他组织有效地管理和处置网络舆情。从多个角度来分析该平台,我们可以考虑以下几个方面: 1,技术实现 网络舆情监测处置平台的技术实现是其核心,它通常采…...
百度文心一言对标 ChatGPT,你怎么看?
文心一言 VS ChatGPT接受不完美 期待进步里程碑意义文心一言初体验✔ 文学创作✔ 商业文案创作✔ 数理逻辑推算✔ 中文理解✔ 多模态生成写在最后何为文心?“文”就是我们中华语言文字中的文,“心”是希望该语言模型可以用心的去理解语言,用心…...

阿里笔试2023-3-15
太菜了,记录一下笔试题目,代码有更好解法欢迎分享。 1、满二叉子树的数量。 给定一颗二叉树,试求这课二叉树有多少个节点满足以该节点为根的子树是满二叉树?满二叉树指每一层都达到节点最大值。 第一行输入n表示节点数量ÿ…...

VibeVoice API接口调用案例:WebSocket流式通信实测
VibeVoice API接口调用案例:WebSocket流式通信实测 1. 项目概述 VibeVoice 是一个基于微软开源模型的实时语音合成系统,能够将文本内容快速转换为高质量的语音输出。这个系统特别适合需要实时语音交互的应用场景,比如语音助手、有声读物制作…...

3个突破壁垒方法:网盘直链下载助手如何让文件获取效率提升5倍
3个突破壁垒方法:网盘直链下载助手如何让文件获取效率提升5倍 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘…...

5分钟搞定Windows风扇智能控制:告别噪音烦恼,打造极致静音电脑系统
5分钟搞定Windows风扇智能控制:告别噪音烦恼,打造极致静音电脑系统 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode…...

精密五金结构件配套
一、我们能为机器人行业提供什么?专注机器人非核心精密五金结构件配套,面向:工业机器人|协作机器人|人形机器人|AGV/AMR|末端执行器|减速器 / 伺服 / 模组|自动化集成工作…...

个人创作者利器:AI净界RMBG-1.4,3秒完成以往30分钟的手动精修
个人创作者利器:AI净界RMBG-1.4,3秒完成以往30分钟的手动精修 1. 为什么你需要AI净界RMBG-1.4? 作为一名内容创作者,你是否经常遇到这些困扰: 拍摄的产品照片背景杂乱,需要花费大量时间手动抠图精心设计…...

SEO优化中关键词的作用是什么_关键词布局对SEO有什么影响
SEO优化中关键词的作用是什么 在现代网络营销中,SEO(搜索引擎优化)是提升网站在搜索引擎结果中排名的重要手段。其中,关键词的作用至关重要。关键词不仅是搜索引擎理解用户意图的重要载体,也是搜索引擎算法评估网站相…...
)
CASS11.0再升级:新增实用功能与BUG修复全解析(2022.5.11版)
1. CASS11.0版本升级概览 作为测绘行业的老牌软件,CASS11.0这次更新又带来了不少惊喜。记得去年11月刚发布时,我就第一时间安装体验过,当时就被它的3D建模能力和土方计算优化惊艳到了。没想到短短半年时间,研发团队又连续推出了三…...

【完整源码+数据集+部署教程】光纤缺陷检测系统源码分享[一条龙教学YOLOV8标注好的数据集一键训练_70+全套改进创新点发刊_Web前端展示]
一、背景意义 随着光纤通信技术的迅猛发展,光纤作为信息传输的主要媒介,其质量的优劣直接影响到通信系统的性能和稳定性。光纤在生产、运输和安装过程中,可能会出现各种缺陷,如划痕、气泡、折弯等,这些缺陷不仅会导致信…...

Clipboard命令行参数完整指南:掌握所有可用选项的终极手册
Clipboard命令行参数完整指南:掌握所有可用选项的终极手册 【免费下载链接】Clipboard 😎🏖️🐬 Your new, 𝙧𝙞𝙙𝙤𝙣𝙠𝙪𝙡…...
)
从零到一:手把手教你用CANoe和Python脚本实现UDS诊断自动化测试(附完整代码)
从零到一:手把手教你用CANoe和Python脚本实现UDS诊断自动化测试(附完整代码) 在汽车电子测试领域,UDS(Unified Diagnostic Services)诊断协议的自动化测试已经成为提升开发效率的关键环节。传统的手动测试方…...