Robot Operating System——电池电量通知
大纲
- 应用场景
- 定义
- 字段解释
- 案例
sensor_msgs::msg::BatteryState 是 ROS 2 中定义的消息类型,用于表示电池状态。它包含了电池电量、电压、电流、温度等信息。
应用场景
- 机器人
- 电池监控:在移动机器人中,电池是主要的电源。BatteryState 消息可以用于监控电池的电压、电流、温度和剩余电量,确保机器人在任务执行过程中不会因为电池耗尽而停止工作。
- 电池管理系统:通过监控电池状态,机器人可以实现智能电池管理,例如在电量低时自动返回充电站进行充电。
- 无人机
- 飞行时间预测:无人机依赖电池供电,BatteryState 消息可以用于监控电池状态,预测剩余飞行时间,确保无人机在电量耗尽前安全降落。
- 电池健康监测:通过监控电池的电压、电流和温度,可以评估电池的健康状态,及时发现和更换老化的电池,确保飞行安全。
- 电动汽车
- 续航里程预测:在电动汽车中,BatteryState 消息可以用于监控电池状态,预测剩余续航里程,帮助驾驶员合理规划行程。
- 电池管理系统:通过监控电池状态,电动汽车可以实现智能电池管理,例如在电量低时提示驾驶员充电,或者在充电时优化充电策略。
- 智能家居
- 备用电源监控:在智能家居系统中,备用电源(如UPS)可以通过BatteryState 消息监控电池状态,确保在主电源故障时能够正常供电。
- 设备电池监控:智能家居中的许多设备(如智能门锁、传感器等)依赖电池供电,通过监控电池状态,可以及时提醒用户更换电池,确保设备正常运行。
- 可穿戴设备
- 健康监测设备:在可穿戴健康监测设备中,BatteryState 消息可以用于监控电池状态,确保设备在长时间使用过程中不会因为电池耗尽而停止工作。
- 智能手表:智能手表依赖电池供电,通过监控电池状态,可以优化电池使用策略,延长设备的续航时间。
定义
以下是 sensor_msgs::msg::BatteryState 的定义:
#include "sensor_msgs/msg/battery_state.hpp"namespace sensor_msgs
{
namespace msg
{struct BatteryState
{float voltage; // 电池电压 (单位: 伏特)float temperature; // 电池温度 (单位: 摄氏度)float current; // 电池电流 (单位: 安培)float charge; // 电池电量 (单位: 安培小时)float capacity; // 电池容量 (单位: 安培小时)float design_capacity; // 电池设计容量 (单位: 安培小时)float percentage; // 电池剩余电量百分比 (0.0 到 1.0)uint8_t power_supply_status; // 电源状态 (例如:充电中、放电中、满电等)uint8_t power_supply_health; // 电源健康状态 (例如:良好、过热、过压等)uint8_t power_supply_technology; // 电源技术 (例如:锂离子、镍镉等)bool present; // 电池是否存在std::vector<float> cell_voltage; // 每个电池单元的电压std::vector<float> cell_temperature;// 每个电池单元的温度std::string location; // 电池位置std::string serial_number; // 电池序列号
};} // namespace msg
} // namespace sensor_msgs
字段解释
- voltage: 电池电压,单位为伏特。
- temperature: 电池温度,单位为摄氏度。
- current: 电池电流,单位为安培。
- charge: 电池电量,单位为安培小时。
- capacity: 电池容量,单位为安培小时。
- design_capacity: 电池设计容量,单位为安培小时。
- percentage: 电池剩余电量百分比,范围为 0.0 到 1.0。
- power_supply_status: 电源状态,例如充电中、放电中、满电等。
- power_supply_health: 电源健康状态,例如良好、过热、过压等。
- power_supply_technology: 电源技术,例如锂离子、镍镉等。
- present: 电池是否存在。
- cell_voltage: 每个电池单元的电压。
- cell_temperature: 每个电池单元的温度。
- location: 电池位置。
- serial_number: 电池序列号。
案例
下面这个例子中,我们通过名字叫battery_state_publisher的Node,发布一条关于电量(模拟数据)的主题消息。
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/battery_state.hpp"class BatteryStatePublisher : public rclcpp::Node
{
public:BatteryStatePublisher(): Node("battery_state_publisher"){publisher_ = this->create_publisher<sensor_msgs::msg::BatteryState>("battery_state", 10);timer_ = this->create_wall_timer(500ms, std::bind(&BatteryStatePublisher::publish_battery_state, this));}private:void publish_battery_state(){auto message = sensor_msgs::msg::BatteryState();message.voltage = 12.5;message.temperature = 25.0;message.current = 1.2;message.charge = 50.0;message.capacity = 100.0;message.design_capacity = 100.0;message.percentage = 0.5;message.power_supply_status = 1; // 例如:充电中message.power_supply_health = 0; // 例如:良好message.power_supply_technology = 1; // 例如:锂离子message.present = true;message.cell_voltage = {4.2, 4.1, 4.2};message.cell_temperature = {25.0, 25.1, 25.2};message.location = "Battery compartment";message.serial_number = "123456789";publisher_->publish(message);}rclcpp::Publisher<sensor_msgs::msg::BatteryState>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<BatteryStatePublisher>());rclcpp::shutdown();return 0;
}
相关文章:

Robot Operating System——电池电量通知
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::BatteryState 是 ROS 2 中定义的消息类型,用于表示电池状态。它包含了电池电量、电压、电流、温度等信息。 应用场景 机器人 电池监控:在移动机器人中,电池是主要的电源。BatteryState 消…...

二进制安装docker
目录 一、准备 Docker CE 二进制包 二、解压.tgz包 三、复制二进制文件到/usr/bin/目录 四、创建用户组 五、配置相关服务配置文件 六、拷贝配置文件到指定目录 七、启动 dockerd 服务进程 八、shell脚本一键安装 一、准备 Docker CE 二进制包 https://download.docker…...

@SpringBootConfiguration重复加载报错
Junit单元测试Test启动报错,SpringBootConfiguration注解重复问题排查: SpringBootApplication 注解的 exclude 属性用于排除特定的自动配置类,而不是用于排除主配置类本身。因此,不能通过 exclude 属性来排除主配置类的加载。 …...

【SpringBoot】数据验证之分组校验
分组校验 在不同情况下,可能对JavaBean对象的数据校验规则有所不同,有时需要根据数据状态对JavaBean中的某些属性字段进行单独验证。这时就可以使用分组校验功能,即根据状态启用一组约束。 Hibernate Validator的注解提供了groups参数&#…...

MySQL Galera Cluster 部署与介绍
目录 主要特点 组件 一. 环境准备 二. 配置 1. 配置 galera1 主机的my.cnf的文件 2. 配置 galera2 主机的my.cnf的文件 3. 配置 galera3 主机的my.cnf的文件 4. 在给galera1 主机的my.cnf的文件增加节点 5. 写入数据验证同步 6. 配置 galera4 主机的my.cnf的文件 M…...

RuoYi-Vue-Plus (XXL-JOB任务调度中心二:配置管理与定时任务编写、执行策略、命令行任务、邮件报警等等
一、后端xxl job的配置属性介绍 enabled : 是否开启执行器,如果为false,调度中心就调用不了后端定时任务admin-addresses:调度中心的地址,多个则可以逗号拼接: url1,url2,url3access-token: 执行器通讯TOKEN ,必须和x…...

【docker】虚拟化与docker基础
一、虚拟化 1.虚拟化概述 什么是虚拟化? 虚拟化:将应用程序和系统内核资源进行解耦,以操作系统级别进行隔离,目的是提高资源利用率 2、虚拟化的功能 将虚拟化的性能优化趋近于物理资源的性能,主要用于提高资源利用…...

Vue3安装ffmpeg做视频截取报错
通过 yarn 安装 ffmpeg 时报错。 即,执行以下指令时报错: yarn add ffmpeg/ffmpeg^0.10.0 yarn add ffmpeg/core^0.10.0错误信息: node_modules\pngquant-bin: Command failed. Error: pngquant failed to build, make sure that libpng-d…...

如何在 Java 中实现自定义的排序算法?
在Java中实现自定义排序算法的步骤如下: 创建一个类,实现Java的Comparator接口,该接口包含一个compare方法,用于比较两个对象的大小。在compare方法中,根据自定义的排序规则,比较两个对象的大小并返回-1、…...

【Homebrew】brew 命令
Brew(也称为Homebrew)是Mac OS上的一款包管理器,它允许用户通过简单的命令行界面来安装、更新、卸载和管理软件包。以下是一些常用的Brew命令及其功能说明: 安装与卸载 安装Brew 命令(适用于大多数用户,可…...

【https】无法安装OpenSSL时如何在局域网开通https服务
【背景】 做Stream传输服务,需要用到fetch方法,所以自然也需要https服务。 公司的开发机由于某些管理上的原因无法直接安装openssl for win的安装包。 【分析】 没有命令行工具,就试试看万能的python包吧,直接安装cryptography包。 pip install cryptography【方法】 …...

OpenGL实现3D游戏编程【连载1】——初探3D世界
1、前言 在我学习C的过程中,研究了一下OpenGL编程,打开了3D世界的编程世界,3D世界的效果还是相当不错。而且OpenGL能够支持跨平台兼容,是不错的学习方向,于是就自己学习了网上的很多教程,并将所有学到的知…...
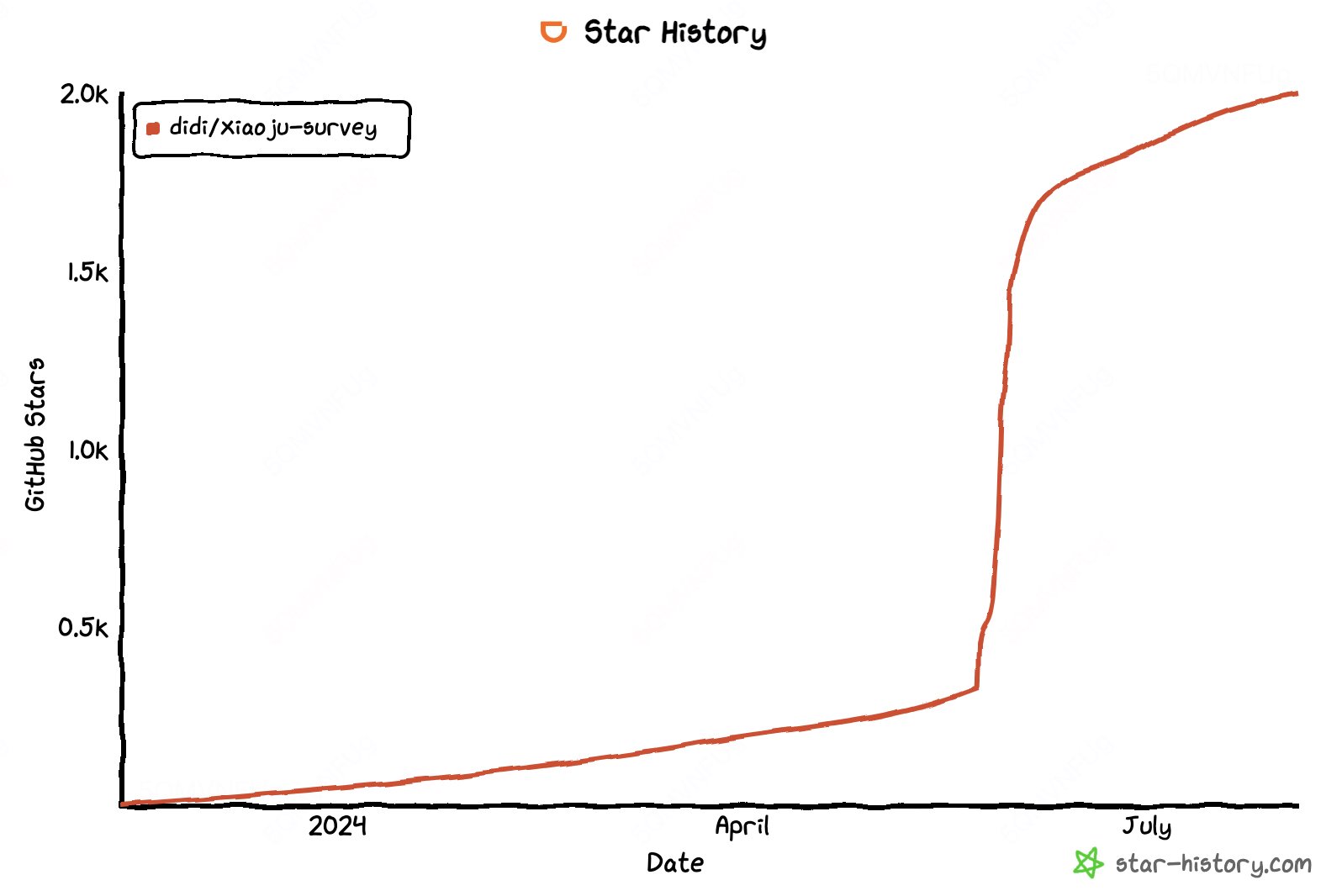
工程化实践:工程配置化设计
文内项目 Github:XIAOJUSURVEY 配置化是很灵活且很常见的使用,那XIAOJUSURVEY里有哪些地方应用到了呢? 基础模板 问卷模板 在创建问卷时,我们提供了多种问卷类型选择,例如普通问卷、投票、报名、NPS等。 为了实…...

浏览器事件循环详解
1. 浏览器的进程模型 1.1. 何为进程? 程序运行需要有它自己的专属内存空间,可以把这块内存空间简单的理解为进程。 每个应用至少有一个进程,进程之间相互独立,即使要通信,也需要双方同意。 1.2. 何为线程?…...
)
Linux:线程管理(线程创建、线程退出、线程回收、线程分离、其它线程函数)
线程管理 (1)What(什么是线程管理) 对程序中线程的创建、调度、同步、退出、回收等操作进行有效的控制和协调 (2)Why(为什么要管理线程) 充分利用系统资源,提高程序的并发的性能和稳定性。但如果管理不当,…...

【JVM】常见面试题
🥰🥰🥰来都来了,不妨点个关注叭! 👉博客主页:欢迎各位大佬!👈 文章目录 1. JVM 中的内存区域划分2. JVM 的类加载机制2.1 加载(Loading)✨双亲委派模型2.2 验证(Verification)2.3 准…...

0805作业+梳理
一、作业: 代码: create.c #include<myhead.h> int main(int argc, const char *argv[]) {//创建一个有名管道文件if(mkfifo("./linux",0664)-1){perror("mkfifo linux error");return -1;}getchar();system("rm linux…...

Java高并发编程详解教程(对高并发更深一层的领悟和体会 电子版)
前言 第一部分主要阐述Thread的基础知识,详细介绍线程的API使用、线程安全、线程间数据通信以及如何保护共享资源等内容,它是深入学习多线程内容的基础。 在第二部分中之所以引人 ClassLoader,是因为 ClassLoader 与线程不无关系࿰…...

字符串中的第一个唯一字符
给定一个字符串 s ,找到 它的第一个不重复的字符,并返回它的索引 。如果不存在,则返回 -1 。 s 只包含小写字母 示例 1: 输入: s "leetcode" 输出: 0示例 2: 输入: s "loveleetcode" 输出: 2示例 3: 输…...

leetcode数论(3044. 出现频率最高的质数)
前言 经过前期的基础训练以及部分实战练习,粗略掌握了各种题型的解题思路。现阶段开始专项练习。 描述 给你一个大小为 m x n 、下标从 0 开始的二维矩阵 mat 。在每个单元格,你可以按以下方式生成数字: 最多有 8 条路径可以选择࿱…...

从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤
从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤在当今数据驱动的时代,对象存储已成为现代应用架构中不可或缺的一部分。MinIO作为高性能、兼容S3协议的开源对象存储解决方案,凭借其轻量级和易用性赢得了众多…...

2026年,揭秘那些真正安全的原生态食材厂家你不可不知的秘密
随着人们生活水平的提升以及对健康的日益重视,选择真正安全的原生态食材已经成为许多人购买食物的标准。但市场的繁杂使得甄别真正安全的食材厂家变得愈加困难。今天,我将通过几个关键角度,为大家揭秘那些真正安全的原生态食材厂家的秘密&…...

PlayAI语音合成质量到底如何?12款竞品横向对比+5项MOS/LSD/STOI硬指标揭榜
更多请点击: https://kaifayun.com 第一章:PlayAI语音合成质量评测报告 PlayAI 是一款面向开发者与内容创作者的实时语音合成(TTS)服务,支持多语种、多音色及情感可控输出。本报告基于客观可复现的评测流程࿰…...
到panic:深入Linux 5.4内核,看异常处理如何层层递进)
从BUG()到panic:深入Linux 5.4内核,看异常处理如何层层递进
从BUG()到panic:Linux内核异常处理的防御体系全解析当你在深夜调试一个内核模块时,突然屏幕刷出一串红色警告——这可能是每个Linux内核开发者都经历过的噩梦时刻。但你是否想过,从第一行警告出现到系统完全崩溃,内核究竟经历了怎…...

破解材料数据荒:合成数据与随机森林预测聚合物阻燃性能
1. 项目概述与核心挑战在材料研发领域,尤其是涉及公共安全的聚合物阻燃性研究,传统实验方法正面临巨大瓶颈。想象一下,你是一位材料工程师,需要设计一种用于高铁内饰或高层建筑电缆护套的新型聚合物,其阻燃性能必须满足…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...

失传34年的南极DOS游戏LAN - LOK重见天日,背后藏着怎样的历史?
LAN - LOK:失传34年的南极DOS破坏游戏这是一次对历史进行重构(或许还会进行现代化改造)的尝试。AlphaPixel常处理遗留代码库,接触到80年代和90年代用各种方言和语言编写、存储在难处理容器和介质中的代码。因保密协议,…...

8大网盘文件直链一键获取:LinkSwift让你的下载速度突破限速瓶颈
8大网盘文件直链一键获取:LinkSwift让你的下载速度突破限速瓶颈 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云…...

基于特征工程的电力系统虚假数据注入攻击检测方案
1. 项目概述与核心挑战在电力系统这个庞大而精密的“交响乐团”中,自动发电控制(AGC)系统扮演着指挥家的角色。它的核心任务是根据电网频率和联络线功率的微小波动,实时调整各发电机的出力,确保整个电网的频率稳定在50…...

注释覆盖率从42%→91%仅用8小时,DeepSeek R1/R2模型注释优化全链路实操,
更多请点击: https://kaifayun.com 第一章:注释覆盖率跃升的工程价值与DeepSeek模型适配性洞察 注释覆盖率并非代码“装饰”,而是可量化的知识沉淀密度指标。当函数级注释覆盖率从32%提升至89%,CI流水线中PR评审平均耗时下降41%&…...